JP6647633B2 - 搬送治具及びそれを用いた表面処理装置 - Google Patents
搬送治具及びそれを用いた表面処理装置 Download PDFInfo
- Publication number
- JP6647633B2 JP6647633B2 JP2017204603A JP2017204603A JP6647633B2 JP 6647633 B2 JP6647633 B2 JP 6647633B2 JP 2017204603 A JP2017204603 A JP 2017204603A JP 2017204603 A JP2017204603 A JP 2017204603A JP 6647633 B2 JP6647633 B2 JP 6647633B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- movable
- power supply
- fixed
- chuck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- C—CHEMISTRY; METALLURGY
- C25—ELECTROLYTIC OR ELECTROPHORETIC PROCESSES; APPARATUS THEREFOR
- C25D—PROCESSES FOR THE ELECTROLYTIC OR ELECTROPHORETIC PRODUCTION OF COATINGS; ELECTROFORMING; APPARATUS THEREFOR
- C25D17/00—Constructional parts, or assemblies thereof, of cells for electrolytic coating
- C25D17/06—Suspending or supporting devices for articles to be coated
- C25D17/08—Supporting racks, i.e. not for suspending
-
- C—CHEMISTRY; METALLURGY
- C25—ELECTROLYTIC OR ELECTROPHORETIC PROCESSES; APPARATUS THEREFOR
- C25D—PROCESSES FOR THE ELECTROLYTIC OR ELECTROPHORETIC PRODUCTION OF COATINGS; ELECTROFORMING; APPARATUS THEREFOR
- C25D17/00—Constructional parts, or assemblies thereof, of cells for electrolytic coating
- C25D17/06—Suspending or supporting devices for articles to be coated
-
- C—CHEMISTRY; METALLURGY
- C25—ELECTROLYTIC OR ELECTROPHORETIC PROCESSES; APPARATUS THEREFOR
- C25D—PROCESSES FOR THE ELECTROLYTIC OR ELECTROPHORETIC PRODUCTION OF COATINGS; ELECTROFORMING; APPARATUS THEREFOR
- C25D21/00—Processes for servicing or operating cells for electrolytic coating
-
- C—CHEMISTRY; METALLURGY
- C25—ELECTROLYTIC OR ELECTROPHORETIC PROCESSES; APPARATUS THEREFOR
- C25D—PROCESSES FOR THE ELECTROLYTIC OR ELECTROPHORETIC PRODUCTION OF COATINGS; ELECTROFORMING; APPARATUS THEREFOR
- C25D17/00—Constructional parts, or assemblies thereof, of cells for electrolytic coating
- C25D17/007—Current directing devices
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- Materials Engineering (AREA)
- Metallurgy (AREA)
- Organic Chemistry (AREA)
- Electroplating Methods And Accessories (AREA)
- Load-Engaging Elements For Cranes (AREA)
Description
搬送部と、
前記搬送部に垂下して支持されるワーク保持部と、
を有し、
前記ワーク保持部は、
水平に延びる固定部材と、
前記固定部材にスライド可能に支持され、前記固定部材の両端より突出する2つの可動部材と、
前記固定部材に支持され、ワークの上端部をチャックする上部固定チャック部材と、
前記2つの可動部材の各々に取り付けられ、前記ワークの上端部をチャックする上部可動チャック部材と、
を有する搬送治具に関する。
前記2つの可動部材の各々は、
前記固定部材にスライド可能に支持される上側横枠可動部材と、
前記上側横枠可動部材に固定される垂直部材と、
を含み、
前記上部可動チャック部材は前記垂直部材に支持されても良い。
前記垂直部材は、
縦枠固定部材と、
前記縦枠固定部材に対して垂直方向にスライド可能に支持される縦枠可動部材と、
前記縦枠可動部材の下端部に支持され、前記ワークの下端部をチャックする下部可動チャック部材と、
を含み、
前記上部可動チャック部材は、前記縦枠固定部材に支持されても良い。
前記ワークに給電する給電部をさらに有し、
前記縦枠可動部材は、前記上側横枠可動部材とは電気的に絶縁され、
前記給電部は、
前記固定部材を介して前記上部固定チャック部材に給電する第1給電部と、
前記上側横枠可動部材を介して前記上部可動チャック部材に給電する第2給電部と、
前記縦枠可動部材を介して前記下部可動チャック部材に給電する第3給電部と、
を含むことができる。
前記給電部は、外部レールから給電される被給電部を含み、
前記被給電部は、
固定部と、
前記固定部に水平方向にてスライド可能に支持され、前記固定部の両端より突出する2つの可動部と、
前記2つの可動部に一つずつ取り付けられ、前記外部レールと接触して給電される2つの接触部と、
前記固定部に対して前記2つの可動部を前記ワークの幅に合わせた位置でそれぞれ保持する保持部と、
をさらに有することができる。
前記垂直部材は、
縦枠固定部材と、
前記縦枠固定部材に対して垂直方向にスライド可能に支持される縦枠可動部材と、
前記縦枠可動部材の下端部に支持される基端部から自由端部に向けて水平に延びる下側横枠可動部材と、
を含み、
前記縦枠固定部材に前記上部可動チャック部材が支持され、
前記下側横枠可動部材に下部可動チャック部材を支持することができる。こうすると、ワークの下部を下部可動チャック部材により安定して保持することができる。
ワークの上端部の幅に合わせて、前記上端部の両端部をチャックする位置が可変である2つのチャック部材を含むワーク保持部と、
前記2つのチャック部材を介して前記ワークに給電する給電部と、
を備えた搬送治具であって、
前記給電部は、外部から給電される被給電部を含み、
前記被給電部は、
固定部と、
前記固定部に水平方向にてスライド可能に支持され、前記固定部の両端より突出する2つの可動部と、
前記2つの可動部の各々に取り付けられ、外部レールと接触して給電される接触部と、
前記固定部に対して前記2つの可動部を前記ワークの幅に合わせた位置でそれぞれ保持する保持部と、
をさらに有する搬送治具に関する。
処理液が収容され、上端開口を有する表面処理槽と、
前記表面処理槽の前記処理液中に配置させてワークをそれぞれ保持する(1)〜(14)のいずれかに記載の複数の搬送治具と、
を有する表面処理装置に関する。
図1は、上部開口200Aを有するメッキ槽(広義には表面処理槽)200を有する連続メッキ処理装置(広義には表面処理装置)10の概略断面図である。搬送治具30は、図示しない陽極を備えたメッキ槽200の上部開口200Aよりメッキ液Q内に垂下されるようにワーク20(図3)を保持する。
次に、搬送治具30について、図3〜図5も参照して説明する。搬送治具30は、図1〜図3に示すように、水平アーム部300と、この水平アーム部300垂下される垂直アーム部301とを有する。
搬送治具30は、図2、図3及び図4に示すように、水平アーム部300に垂直アーム部301を介して支持されて垂下されるワーク保持部500を有する。ここで、水平アーム部300と、それに支持される被駆動部320及び被案内部330とを、搬送部と総称する。ワーク保持部500は、搬送部より垂下して支持される。ワーク保持部500は、例えばワーク20の厚さが100μm以下、好ましくは60μm以下のように極薄のワーク20に好適に用いられる。本実施形態では、ワーク20の厚さは例えば40μm=0.04mmである。ただし、ワーク20は厚さが100μmを超えるものであっても良い。
図9は、ワーク20の上端部及び下端部に給電する給電部を示している。この給電部は、2つの上部固定チャック部材600に給電する第1給電部701と、2つの垂直部材562の例えば2つの縦枠固定部材570を介して2つの上部可動チャック部材に給電する第2給電部702,702と、2つの縦枠可動部材580を介して2つの下部可動チャック部材620,620に給電する第3給電部703,703と、含むことができる。これら第1〜第3給電部701〜703は、例えば導電ケーブルで形成することができる。なお、この場合、縦枠固定部材570と縦枠可動部材580とは電気的に絶縁されることが好ましい。
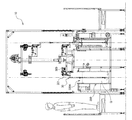
図10は、図3及び図4に示す2つの接触部312,312の幅をワーク20の幅に合わせて調整可能な搬送治具の被給電部を模式的に示す平面図である。図10において、水平アーム部300に固定される固定部311Aには、固定部311Aより突出する2つの可動部900,900が搬送方向Aに沿ってスライド可能に支持される。2つの接触部312は、この2つの可動部900,900にそれぞれ支持される。固定部311Aには、2つの可動部900,900を位置調整後に保持する上述した保持部材530と同様な構造を有する保持部910が設けられる。図10では保持部910は模式的に示され、固定部311Aに形成されるスリット孔311Bを介して可動部900と圧接されるチャック部材800のみが示されている。なお、接触部312,312は給電レール260に押圧接触して移動されるため、接触部312,312の間隔を保持する保持部910は必須である。ただし、保持部910は図8に示す構造に限らず、例えば蝶ネジ等でも良い。
図11及び図12は、特に厚さが薄いワーク例えば30μm以下の厚さのワークであっても確実に保持できる搬送治具30Aを示している。図11及び図12に示す搬送治具30Aにおいて、図3及び図4に示す搬送治具30の部材と同一機能を有する部材については、同一符号を付してその説明を省略する。図11及び図12において、500〜600番台の符号が付された部材については、既に図3及び図4に記載された搬送治具30として説明済である。つまり、図11及び図12に示す搬送治具30Aは、矩形ワーク20の幅及び/又は長さに合わせて上部可動チャック部材610と下部可動チャック部材620の位置を可変できる点において、図3及び図4に記載された搬送治具30と同じである。ただし、図11及び図12に示す搬送治具30Aは、特に厚さが薄いワーク20の上部及び下部を幅広のチャック部材600,610,620で把持するようにしている。
Claims (14)
- 搬送部と、
前記搬送部に垂下して支持されるワーク保持部と、
を有し、
前記ワーク保持部は、
固定部材と、
前記固定部材に対して水平方向にスライド可能に支持され、前記固定部材の両端より突出する2つの可動部材と、
前記固定部材に支持され、ワークの上端部をチャックする上部固定チャック部材と、
前記2つの可動部材の各々に取り付けられ、前記ワークの上端部をチャックする上部可動チャック部材と、
を有し、
前記2つの可動部材の各々は、
前記固定部材にスライド可能に支持される上側横枠可動部材と、
前記上側横枠可動部材に固定される垂直部材と、
を含み、
前記上部可動チャック部材は前記垂直部材に支持されることを特徴とする搬送治具。 - 請求項1において、
前記固定部材に対して前記2つの可動部材を前記ワークの幅に合わせた位置でそれぞれ保持する保持部材をさらに有することを特徴とする搬送治具。 - 請求項1または2において、
前記垂直部材は、
縦枠固定部材と、
前記縦枠固定部材に対して垂直方向にスライド可能に支持される縦枠可動部材と、
前記縦枠可動部材の下端部に支持され、前記ワークの下端部をチャックする下部可動チャック部材と、
を含み、
前記上部可動チャック部材は、前記縦枠固定部材に支持されることを特徴とする搬送治具。 - 請求項1または2において、
前記ワークに給電する給電部をさらに有し、
前記給電部は、前記固定部材を介して前記上部固定チャック部材に給電する第1給電部と、前記垂直部材を介して前記上部可動チャック部材に給電する第2給電部と、を含むことを特徴とする搬送治具。 - 請求項3において、
前記ワークに給電する給電部をさらに有し、
前記縦枠可動部材は、前記上側横枠可動部材とは電気的に絶縁され、
前記給電部は、
前記固定部材を介して前記上部固定チャック部材に給電する第1給電部と、
前記上側横枠可動部材を介して前記上部可動チャック部材に給電する第2給電部と、
前記縦枠可動部材を介して前記下部可動チャック部材に給電する第3給電部と、
を含むことを特徴とする搬送治具。 - 請求項4または5において、
前記給電部は、外部レールから給電される被給電部を含み、
前記被給電部は、
固定部と、
前記固定部に水平方向にてスライド可能に支持され、前記固定部の両端より突出する2つの可動部と、
前記2つの可動部の各々に取り付けられ、外部レールと接触して給電される接触部と、
前記固定部に対して前記2つの可動部を前記ワークの幅に合わせた位置でそれぞれ保持する保持部と、
をさらに有することを特徴とする搬送治具。 - 請求項3または5において、
前記縦枠可動部材は、最下端面を転接面とするローラーを有することを特徴とする搬送治具。 - 請求項1において、
前記垂直部材は、
縦枠固定部材と、
前記縦枠固定部材に対して垂直方向にスライド可能に支持される縦枠可動部材と、
前記縦枠可動部材の下端部に支持される基端部から自由端部に向けて水平に延びる下側横枠可動部材と、
を含み、
前記縦枠固定部材に前記上部可動チャック部材が支持され、
前記下側横枠可動部材に下部可動チャック部材が支持されることを特徴とする搬送治具。 - 請求項8において、
前記2つの可動部材にそれぞれ設けられた2つの前記下側横枠可動部材の前記自由端部を水平方向に移動案内する案内部をさらに有することを特徴とする搬送治具。 - 請求項3または9において、
前記縦枠可動部材は、前記ワークの側部をチャックする側部固定チャック部材をさらに有することを特徴とする搬送治具。 - 請求項3、9または10において、
縦方向に延びる前記縦枠可動部材は、前記ワークの主面と平行な第1面の幅よりも前記ワークの主面と直交する第2面の幅が短い板状部材で形成されることを特徴とする搬送治具。 - 請求項1乃至11のいずれか一項において、
前記搬送部は、前記ワークの主面と平行に延びる軸の廻りに前記ワーク保持部を回動自在に支持することを特徴とする搬送治具。 - ワークの上端部の幅に合わせて、前記上端部の両端部をチャックする位置が可変である2つのチャック部材を含むワーク保持部と、
前記2つのチャック部材を介して前記ワークに給電する給電部と、
を備えた搬送治具であって、
前記給電部は、外部から給電される被給電部を含み、
前記被給電部は、
固定部と、
前記固定部に水平方向にてスライド可能に支持され、前記固定部の両端より突出する2つの可動部と、
前記2つの可動部の各々に取り付けられ、外部レールと接触して給電される接触部と、
前記固定部に対して前記2つの可動部を前記ワークの幅に合わせた位置でそれぞれ保持する保持部と、
をさらに有することを特徴とする搬送治具。 - 処理液が収容され、上端開口を有する表面処理槽と、
前記表面処理槽の前記処理液中に配置させてワークをそれぞれ保持する請求項1乃至13のいずれか一項に記載の複数の搬送治具と、
を有することを特徴とする表面処理装置。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| MYPI2019007158A MY196500A (en) | 2017-06-05 | 2018-05-25 | Transfer Jig And Surface Treatment Apparatus Using Same |
| CN202210287740.2A CN114507896A (zh) | 2017-06-05 | 2018-05-25 | 输送夹具及使用该输送夹具的表面处理装置 |
| CN201880036807.7A CN110719972B (zh) | 2017-06-05 | 2018-05-25 | 输送夹具及使用该输送夹具的表面处理装置 |
| KR1020197035622A KR20200016233A (ko) | 2017-06-05 | 2018-05-25 | 반송 지그 및 그를 이용한 표면처리 장치 |
| PCT/JP2018/020120 WO2018225535A1 (ja) | 2017-06-05 | 2018-05-25 | 搬送治具及びそれを用いた表面処理装置 |
| TW107118866A TWI750378B (zh) | 2017-06-05 | 2018-06-01 | 搬運支架及使用該搬運支架的表面處理裝置 |
| PH12019502715A PH12019502715A1 (en) | 2017-06-05 | 2019-12-02 | Transfer jig and surface treatment apparatus using same |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017111086 | 2017-06-05 | ||
| JP2017111086 | 2017-06-05 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018204093A JP2018204093A (ja) | 2018-12-27 |
| JP2018204093A5 JP2018204093A5 (ja) | 2019-12-26 |
| JP6647633B2 true JP6647633B2 (ja) | 2020-02-14 |
Family
ID=64956527
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017204603A Active JP6647633B2 (ja) | 2017-06-05 | 2017-10-23 | 搬送治具及びそれを用いた表面処理装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6647633B2 (ja) |
| KR (1) | KR20200016233A (ja) |
| PH (1) | PH12019502715A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102380978B1 (ko) | 2021-01-21 | 2022-04-01 | (주)에스와이이엔씨 | 전기접촉면적을 증대시킨 도금용 행거 |
| KR102371478B1 (ko) * | 2021-01-21 | 2022-03-08 | (주)에스와이이엔씨 | 도금용 클램프 |
| KR102505531B1 (ko) * | 2021-06-03 | 2023-03-03 | 주식회사 피앤아이 | 규격조절이 용이한 도금지그 |
| CN115181925B (zh) * | 2022-08-17 | 2024-02-20 | 巢湖市国力航标器材有限公司 | 一种锚链防腐用表面镀膜装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5283585A (en) | 1976-01-01 | 1977-07-12 | Mitsubishi Chem Ind Ltd | Novel penicillin derivatives |
| JPS5898540A (ja) | 1981-12-07 | 1983-06-11 | 新明和工業株式会社 | 吸引車 |
| JPH10145030A (ja) * | 1996-11-07 | 1998-05-29 | Maruya Seisakusho:Kk | プリント配線基板の基板保持用治具とその取付装置 |
| JP2006117979A (ja) * | 2004-10-20 | 2006-05-11 | Marunaka Kogyo Kk | 電気メッキ装置におけるワークハンガー |
| JP5340642B2 (ja) * | 2008-05-30 | 2013-11-13 | 上村工業株式会社 | めっき処理用ワーク保持治具 |
| JP5613499B2 (ja) * | 2010-08-25 | 2014-10-22 | アルメックスPe株式会社 | 表面処理装置 |
| KR101300325B1 (ko) * | 2011-12-21 | 2013-08-28 | 삼성전기주식회사 | 기판 도금 장치 및 그 제어 방법 |
| JP5865958B2 (ja) * | 2014-06-27 | 2016-02-17 | アルメックスPe株式会社 | 表面処理装置及びワーク保持治具 |
-
2017
- 2017-10-23 JP JP2017204603A patent/JP6647633B2/ja active Active
-
2018
- 2018-05-25 KR KR1020197035622A patent/KR20200016233A/ko not_active Application Discontinuation
-
2019
- 2019-12-02 PH PH12019502715A patent/PH12019502715A1/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018204093A (ja) | 2018-12-27 |
| PH12019502715A1 (en) | 2020-06-08 |
| KR20200016233A (ko) | 2020-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6647633B2 (ja) | 搬送治具及びそれを用いた表面処理装置 | |
| WO2018225535A1 (ja) | 搬送治具及びそれを用いた表面処理装置 | |
| JP5833355B2 (ja) | 表面処理装置 | |
| TWI477658B (zh) | Surface treatment devices and workpiece to maintain a rule | |
| JP6793966B2 (ja) | ワーク保持治具及び表面処理装置 | |
| JP5416005B2 (ja) | 表面処理装置における板状被処理物の搬送装置、この搬送装置の挟持チャック | |
| JP5865958B2 (ja) | 表面処理装置及びワーク保持治具 | |
| JP2013011009A5 (ja) | 表面処理装置 | |
| JP3172547U (ja) | 搬送式連続メッキ装置のグリス供給システム | |
| JP3176980U (ja) | 水平搬送メッキ処理装置における薄板状被処理物のクランプ治具 | |
| JP5283585B2 (ja) | 表面処理装置における板状被処理物の搬送装置 | |
| KR20110073051A (ko) | 자동화기기용 피치변환 이송장치 | |
| CN105541096B (zh) | 基板加工装置 | |
| KR20210123332A (ko) | 워크 유지 지그 및 표면처리 장치 | |
| KR102380767B1 (ko) | 도금용 행거의 클램핑 이송장치 | |
| JP6687592B2 (ja) | 表面処理装置及びワーク保持治具 | |
| JP2016029219A (ja) | 表面処理装置 | |
| KR20190038416A (ko) | 기판 가공 장치 | |
| JP2015063717A (ja) | ワーク保持枠体及びこれを用いためっき処理装置 | |
| CN105541093B (zh) | 基板加工装置 | |
| KR20190063399A (ko) | 기판 반송 장치 및 기판 가공 장치 | |
| TW202033840A (zh) | 工件保持治具及表面處理裝置 | |
| KR20210123334A (ko) | 워크 유지 지그 및 표면처리 장치 | |
| WO2023013363A1 (ja) | ワーク保持治具及び表面処理装置 | |
| TW201907768A (zh) | 表面處理裝置及搬運支架 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191115 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191115 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20191115 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20191121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6647633 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |