JP6583121B2 - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- JP6583121B2 JP6583121B2 JP2016085382A JP2016085382A JP6583121B2 JP 6583121 B2 JP6583121 B2 JP 6583121B2 JP 2016085382 A JP2016085382 A JP 2016085382A JP 2016085382 A JP2016085382 A JP 2016085382A JP 6583121 B2 JP6583121 B2 JP 6583121B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- notification
- illuminance
- driving support
- moving body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 31
- 230000007613 environmental effect Effects 0.000 claims description 18
- 238000013459 approach Methods 0.000 claims description 14
- 238000004891 communication Methods 0.000 claims description 14
- 230000000007 visual effect Effects 0.000 claims description 12
- 238000000034 method Methods 0.000 description 37
- 238000012545 processing Methods 0.000 description 17
- 230000000694 effects Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 6
- 230000001629 suppression Effects 0.000 description 6
- 238000003915 air pollution Methods 0.000 description 5
- 238000005286 illumination Methods 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 3
- 230000007257 malfunction Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000011109 contamination Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000002779 inactivation Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 239000013618 particulate matter Substances 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/163—Decentralised systems, e.g. inter-vehicle communication involving continuous checking
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/179—Distances to obstacles or vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
本実施形態に係る運転支援装置10は、移動体である車両に搭載され、車両の周囲に存在する物体を検知し、車両と物体との接近をその車両の運転者へと報知するものである。
本実施形態に係る運転支援装置10では、環境情報取得部11が取得する環境情報が、第1実施形態と異なっている。本実施形態に係る運転支援装置10の構成を、図4を参照して説明する。
本実施形態に係る運転支援装置10では、環境情報取得部11が取得する環境情報が、第1実施形態と異なっている。本実施形態に係る運転支援装置10の構成を、図5を参照して説明する。
本実施形態に係る運転支援装置10では、環境情報取得部11が取得する環境情報が、第1実施形態と異なっている。本実施形態に係る運転支援装置10の構成を、図6を参照して説明する。
本実施形態に係る運転支援装置10では、距離設定部12が実行する処理の一部が、第1実施形態と異なっている。なお、運転支援装置10の構成は第1実施形態と同様であるため、具体的な説明を省略する。
本実施形態に係る運転支援装置10では、報知制御部13が実行する処理の一部が、第1実施形態と異なっている。なお、運転支援装置10の構成は第1実施形態と同様であるため、具体的な説明を省略する。
本実施形態に係る運転支援装置10は、図10に示すように、車両が備える車速センサ27から車速を取得する点が、上記の各実施形態と異なっている。
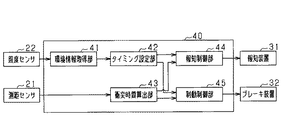
本実施形態に係る運転支援装置40は、図11に示すように、測距センサ21から、車両と物体との距離に加えて、車両と物体との相対速度をも取得する。そして、車両と物体との相対速度が維持された場合に車両と物体とが衝突するまで時間である衝突時間を用いて、報知装置31を作動させるか否かを判定する。また、運転支援装置40は、車両と物体との衝突の危険が高まった場合に、報知装置31に加えてブレーキ装置32を作動させ、衝突の回避又は衝突被害の軽減を行う。
・実施形態では、測距装置として超音波センサを用いるものとした。この点、測距装置は超音波センサに限られず、レーダ装置やステレオカメラ等の他の装置を用いるものとしてもよい。
Claims (8)
- 移動体に設けられ、その移動体の運転者に対して前記移動体と周囲の物体との接近を報知する運転支援装置(10,40)であって、
前記移動体の外部及び内部の少なくとも一方の環境に基づいて求められる情報であり、且つ、前記運転者の視認範囲の広さを示す情報である環境情報を取得する環境情報取得部(11,41)と、
前記環境情報が示す前記視認範囲が狭いほど、前記報知を行う距離である報知距離を大きくする距離設定部(12,42)と、
前記移動体と前記物体との距離を検知距離として取得し、その検知距離が前記報知距離よりも小さい場合に前記運転者へ報知を行う報知制御部(13,44)と、を備え、
前記環境情報取得部は、前記環境情報として前記移動体の周囲の照度を示す情報を取得し、
前記距離設定部は、前記照度が小さいほど前記視認範囲が狭いとし、
前記距離設定部は、前記照度が大きな値へと変化したことを示す場合であって、前記照度の変化量の微分値が基準値よりも大きい場合、前記照度の変化の前の前記報知距離を所定期間維持した後に、前記照度に応じて前記報知距離を小さくし、
前記照度が大きな値へと変化したことを示す場合であって、前記照度の変化量の微分値が基準値以下の場合、前記照度に応じて前記報知距離を小さくし、
前記照度が小さな値へと変化したことを示す場合、前記照度に応じて前記報知距離を大きくする運転支援装置。 - 前記環境情報取得部は、前記環境情報として天候に関する情報を取得する、請求項1に記載の運転支援装置。
- 前記環境情報取得部は、前記環境情報として雨量を取得し、
前記距離設定部は、前記雨量が多いほど前記視認範囲が狭いとする、請求項2に記載の運転支援装置。 - 前記移動体は、
地図情報に基づいて地図を表示する地図表示装置(24)と、
前記移動体の現在位置を取得する位置取得装置(25)と、を備えており、
前記環境情報取得部は、前記環境情報として前記移動体の前記現在位置及び前記地図情報を取得する、請求項1〜3のいずれか1項に記載の運転支援装置。 - 前記移動体は、無線通信回線を通じて情報を取得する通信装置(26)を備えており、
前記環境情報取得部は、前記通信装置から前記環境情報を取得する、請求項1〜4のいずれか1項に記載の運転支援装置。 - 前記報知制御部は、
前記環境情報が前記視認範囲が所定広さよりも広いことを示す場合に、前記報知距離として基準距離を設定し、
第1報知態様と、前記第1報知態様よりも前記運転者が認知しやすい第2報知態様との一方により前記報知を行うものであり、
前記報知距離が前記基準距離に設定されている場合、前記検知距離が前記基準距離よりも小さければ、前記第2報知態様で報知を行い、
前記報知距離が前記基準距離よりも大きく設定されている場合、前記検知距離が前記報知距離よりも小さく且つ前記基準距離よりも大きければ前記第1報知態様で報知を行い、前記検知距離が前記基準距離よりも小さければ、前記第2報知態様で報知を行う、請求項1〜5のいずれか1項に記載の運転支援装置。 - 前記移動体の移動速度を取得する速度取得部をさらに備え、
前記報知制御部は、前記報知距離として、前記環境情報が前記視認範囲が所定広さよりも広いことを示す場合に設定される基準距離を有し、前記移動速度が所定値よりも小さく、且つ前記報知距離が前記基準距離よりも大きく設定されている場合、前記検知距離が前記基準距離よりも小さければ前記報知を行う、請求項1〜6のいずれか1項に記載の運転支援装置。 - 前記距離設定部は、前記報知距離に基づくタイミングである報知タイミングを設定するタイミング設定部(42)であり、
前記移動体と前記物体との相対速度と距離とに基づいて、前記移動体と前記物体との衝突までの時間である衝突時間を算出する衝突時間算出部(43)をさらに備え、
前記報知制御部(44)は、前記衝突時間が前記報知タイミングよりも小さい場合に、前記報知を行う、請求項1〜7のいずれか1項に記載の運転支援装置(40)。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016085382A JP6583121B2 (ja) | 2016-04-21 | 2016-04-21 | 運転支援装置 |
| CN201780024716.7A CN109074745B (zh) | 2016-04-21 | 2017-04-17 | 驾驶辅助装置 |
| PCT/JP2017/015468 WO2017183609A1 (ja) | 2016-04-21 | 2017-04-17 | 運転支援装置 |
| DE112017002121.9T DE112017002121T5 (de) | 2016-04-21 | 2017-04-17 | Fahrunterstützungsvorrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016085382A JP6583121B2 (ja) | 2016-04-21 | 2016-04-21 | 運転支援装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017194861A JP2017194861A (ja) | 2017-10-26 |
| JP2017194861A5 JP2017194861A5 (ja) | 2018-05-24 |
| JP6583121B2 true JP6583121B2 (ja) | 2019-10-02 |
Family
ID=60116492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016085382A Active JP6583121B2 (ja) | 2016-04-21 | 2016-04-21 | 運転支援装置 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6583121B2 (ja) |
| CN (1) | CN109074745B (ja) |
| DE (1) | DE112017002121T5 (ja) |
| WO (1) | WO2017183609A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6868122B2 (ja) * | 2017-11-30 | 2021-05-12 | 本田技研工業株式会社 | 車両制御装置、それを有する車両、および制御方法 |
| JP2020166485A (ja) * | 2019-03-29 | 2020-10-08 | 本田技研工業株式会社 | 運転支援装置 |
| JP7375678B2 (ja) * | 2020-06-02 | 2023-11-08 | トヨタ自動車株式会社 | 車両制御方法、車両制御プログラム、及び車両制御システム |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3203860B2 (ja) * | 1993-02-05 | 2001-08-27 | スズキ株式会社 | 車両用警報装置 |
| JP3885256B2 (ja) * | 1995-09-27 | 2007-02-21 | マツダ株式会社 | 車両の走行状態検出装置 |
| JPH10119676A (ja) * | 1996-10-11 | 1998-05-12 | Honda Access Corp | 車両の衝突警報システム |
| JPH10297355A (ja) * | 1997-04-22 | 1998-11-10 | Harness Sogo Gijutsu Kenkyusho:Kk | ヘッドランプ制御装置および制御方法 |
| JP2000082198A (ja) * | 1998-09-07 | 2000-03-21 | Toyota Motor Corp | 車両制御装置および車両制御方法 |
| DE19847013A1 (de) | 1998-10-13 | 2000-04-20 | Bosch Gmbh Robert | Einparkhilfesystem |
| JP4027008B2 (ja) * | 2000-03-23 | 2007-12-26 | 横河電機株式会社 | 通信制御装置 |
| JP2002274257A (ja) * | 2001-03-19 | 2002-09-25 | Nissan Motor Co Ltd | 車両用監視装置 |
| JP2003112568A (ja) * | 2001-10-04 | 2003-04-15 | Koito Mfg Co Ltd | 車両用照明装置 |
| JP2004164187A (ja) * | 2002-11-12 | 2004-06-10 | Nissan Motor Co Ltd | 車両用報知装置 |
| JP4743658B2 (ja) * | 2005-12-26 | 2011-08-10 | アイシン・エィ・ダブリュ株式会社 | 道路認識装置、道路認識方法及び道路認識プログラム |
| KR101075615B1 (ko) * | 2006-07-06 | 2011-10-21 | 포항공과대학교 산학협력단 | 주행 차량의 운전자 보조 정보 생성 장치 및 방법 |
| US8039799B2 (en) * | 2007-12-31 | 2011-10-18 | Honeywell International Inc. | Motion detection system and method |
| JP5045796B2 (ja) * | 2009-12-03 | 2012-10-10 | 株式会社デンソー | 車両接近警告システム、携帯警告端末、および車載通信機 |
| MY170485A (en) * | 2011-04-13 | 2019-08-07 | Nissan Motor | Driving assistance device and adjacent vehicle detection method therefor |
| KR20120139432A (ko) * | 2011-06-17 | 2012-12-27 | 현대자동차주식회사 | 차간거리 제어 시스템의 활성화 장치 및 그 방법 |
| JP5966440B2 (ja) * | 2012-02-29 | 2016-08-10 | 株式会社デンソー | 運転支援装置 |
| CN103679127B (zh) * | 2012-09-24 | 2017-08-04 | 株式会社理光 | 检测道路路面的可行驶区域的方法和装置 |
| DE102013009339A1 (de) * | 2013-06-04 | 2014-12-04 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zur Notfallassistenz |
| JP6235810B2 (ja) * | 2013-06-28 | 2017-11-22 | 矢崎エナジーシステム株式会社 | 車載器 |
| CN103523055B (zh) * | 2013-09-23 | 2014-12-10 | 华中科技大学 | 一种大坡度盾构隧道内运输车防碰撞预警系统及其工作方法 |
| CN104065930B (zh) * | 2014-06-30 | 2017-07-07 | 青岛歌尔声学科技有限公司 | 集成摄像头模组和光传感器的视觉辅助方法及装置 |
| US10065557B2 (en) * | 2014-08-19 | 2018-09-04 | Mitsubishi Electric Corporation | Rear-road surface illumination apparatus |
| JP2016085382A (ja) | 2014-10-27 | 2016-05-19 | Jsr株式会社 | レジストパターン形成方法及び感放射線性樹脂組成物 |
| CN104392581A (zh) * | 2014-11-27 | 2015-03-04 | 国家电网公司 | 高压线路防外力破坏激光监测预警系统 |
-
2016
- 2016-04-21 JP JP2016085382A patent/JP6583121B2/ja active Active
-
2017
- 2017-04-17 CN CN201780024716.7A patent/CN109074745B/zh active Active
- 2017-04-17 WO PCT/JP2017/015468 patent/WO2017183609A1/ja active Application Filing
- 2017-04-17 DE DE112017002121.9T patent/DE112017002121T5/de not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| CN109074745B (zh) | 2024-03-08 |
| DE112017002121T5 (de) | 2019-01-03 |
| WO2017183609A1 (ja) | 2017-10-26 |
| JP2017194861A (ja) | 2017-10-26 |
| CN109074745A (zh) | 2018-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2700635C1 (ru) | Способ и устройство обнаружения мест для парковки | |
| JP6328254B2 (ja) | 自動走行管理システム、サーバおよび自動走行管理方法 | |
| KR101993104B1 (ko) | 차량 상태 표시 시스템 | |
| JP5353999B2 (ja) | 運転者支援装置 | |
| JP2019125372A (ja) | 気象検出用レーダおよび車両システムの動的制御ならびに作動 | |
| WO2017068695A1 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP5125798B2 (ja) | 車両の前照灯制御装置 | |
| JP6500724B2 (ja) | 危険情報報知システム、サーバ及びコンピュータプログラム | |
| JP6583121B2 (ja) | 運転支援装置 | |
| US11007929B2 (en) | Multimodal vehicle-to-pedestrian notification system | |
| JP6394440B2 (ja) | 汚れ判定装置 | |
| US9056581B2 (en) | On-vehicle light distribution control system | |
| CN110712646A (zh) | 从自主模式转换到手动模式之前对车辆操作员意识的验证 | |
| JP2017062539A (ja) | 走行制御装置 | |
| JP2016173652A5 (ja) | ||
| JP2016057655A (ja) | 自動走行管理システム、サーバおよび自動走行管理方法 | |
| JP2015049583A (ja) | 運転支援装置 | |
| JP2021014183A (ja) | 車載機器制御装置 | |
| US20100103263A1 (en) | Motor vehicle with a distance sensor and an imaging system | |
| JP4992643B2 (ja) | 接触事故防止装置 | |
| JP4702171B2 (ja) | 車両用制御装置 | |
| JP2018127063A (ja) | ワイパ駆動制御装置、ワイパ駆動制御方法及びコンピュータプログラム | |
| JP6303939B2 (ja) | 走行支援装置 | |
| KR20220010900A (ko) | 차량용 레이더 장치 및 제어방법 | |
| JP2020046745A (ja) | 運転支援装置及び運転支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180403 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190325 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190819 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6583121 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |