JP5125798B2 - 車両の前照灯制御装置 - Google Patents
車両の前照灯制御装置 Download PDFInfo
- Publication number
- JP5125798B2 JP5125798B2 JP2008161208A JP2008161208A JP5125798B2 JP 5125798 B2 JP5125798 B2 JP 5125798B2 JP 2008161208 A JP2008161208 A JP 2008161208A JP 2008161208 A JP2008161208 A JP 2008161208A JP 5125798 B2 JP5125798 B2 JP 5125798B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- headlamp
- irradiation
- vehicle
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
Description
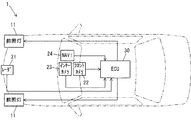
11,11 前照灯
21 レーダ(物標検出手段、照射範囲判定手段)
22 フロントカメラ(物標検出手段、照射範囲判定手段)
23 インナカメラ(視線方向検出手段)
24 ナビゲーションシステム(進行路情報取得手段)
30 ECU(照射方向制御手段、視線方向検出手段、注視状態判定手段、照射方向変更制御手段、照度制御手段、照射範囲判定手段、危険判定手段)
Claims (6)
- 照射方向が可変とされた前照灯の照射方向を自車両の進行路情報または自車両前方の物標の検出情報からなる所定の情報に基づいて制御する照射方向制御手段を有する車両の前照灯制御装置であって、
運転者の視線方向を検出する視線方向検出手段と、
該視線方向検出手段で検出された視線方向の状況に基づいて、運転者が自車両の走行に影響する対象を注視している状態にあるか否かを判定する注視状態判定手段と、
該注視状態判定手段で運転者が注視状態にあると判定されている間、前記前照灯の照射方向を、前記照射方向制御手段で制御されている方向から前記視線方向検出手段で検出された視線方向に変更制御する照射方向変更制御手段とを有し、かつ、
前記前照灯は照度が可変とされており、
前記照射方向変更制御手段で前記前照灯の照射方向が変更されたのち前記注視状態判定手段で所定時間継続して運転者が注視状態にあると判定されているときは、前記前照灯の照度を高くする照度制御手段を有していることを特徴とする車両の前照灯制御装置。 - 前記請求項1に記載の車両の前照灯制御装置において、
前記所定の情報として自車両の進行路情報を取得する進行路情報取得手段が備えられており、
前記照射方向制御手段は、前記前照灯の照射方向を、前記進行路情報取得手段で取得された進行方向に制御することを特徴とする車両の前照灯制御装置。 - 前記請求項1に記載の車両の前照灯制御装置において、
前記所定の情報として自車両前方の物標を検出する物標検出手段が備えられており、
前記照射方向制御手段は、該物標検出手段で物標が検出されたときは、前記前照灯の照射方向を、前記物標検出手段で検出された物標の方向に制御することを特徴とする車両の前照灯制御装置。 - 前記請求項3に記載の車両の前照灯制御装置において、
前記物標検出手段で検出された物標が、前照灯の現在の照射範囲外に存在するか否かを判定する照射範囲判定手段が備えられており、
前記照射方向制御手段は、前記物標検出手段で物標が検出され、かつ前記照射範囲判定手段で物標が照射範囲外に存在すると判定されたときは、前記前照灯の照射方向を、前記物標検出手段で検出された物標の方向に制御することを特徴とする車両の前照灯制御装置。 - 前記請求項3に記載の車両の前照灯制御装置において、
前記物標検出手段で検出された物標が自車両に対して危険であるか否かを判定する危険判定手段が備えられており、
前記照射方向制御手段は、前記物標検出手段で物標が検出され、かつ前記危険判定手段で危険と判定されたときは、前記前照灯の照射方向を、前記物標検出手段で検出された物標の方向に制御することを特徴とする車両の前照灯制御装置。 - 前記請求項1から請求項5のいずれか1項に記載の車両の前照灯制御装置において、
前記照度制御手段は、所定周期で間欠的に前照灯の照度を高くすることを特徴とする車両の前照灯制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008161208A JP5125798B2 (ja) | 2008-06-20 | 2008-06-20 | 車両の前照灯制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008161208A JP5125798B2 (ja) | 2008-06-20 | 2008-06-20 | 車両の前照灯制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010000893A JP2010000893A (ja) | 2010-01-07 |
| JP2010000893A5 JP2010000893A5 (ja) | 2012-07-19 |
| JP5125798B2 true JP5125798B2 (ja) | 2013-01-23 |
Family
ID=41582972
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008161208A Active JP5125798B2 (ja) | 2008-06-20 | 2008-06-20 | 車両の前照灯制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5125798B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013154835A (ja) * | 2012-01-31 | 2013-08-15 | Denso Corp | ヘッドライト制御装置 |
| JP2013159310A (ja) * | 2012-02-08 | 2013-08-19 | Denso Corp | ヘッドライト制御装置 |
| JP2014032817A (ja) | 2012-08-02 | 2014-02-20 | Sony Corp | 表示装置およびその製造方法、並びに電子機器の製造方法 |
| GB2525655B (en) | 2014-05-01 | 2018-04-25 | Jaguar Land Rover Ltd | Dynamic lighting apparatus and method |
| JP6527679B2 (ja) * | 2014-09-30 | 2019-06-05 | 株式会社Subaru | 車両用前照灯装置 |
| JP5941111B2 (ja) * | 2014-09-30 | 2016-06-29 | 富士重工業株式会社 | 車両用前照灯装置 |
| JP6434768B2 (ja) * | 2014-09-30 | 2018-12-05 | 株式会社Subaru | 車両用前照灯装置 |
| DE102018127756A1 (de) * | 2017-11-15 | 2019-05-16 | Omron Corporation | Fahrerüberwachungsvorrichtung, verfahren und programm |
| JP7014680B2 (ja) * | 2018-07-13 | 2022-02-01 | 株式会社デンソーアイティーラボラトリ | 注視対象物検知装置、注視対象物検知方法、およびプログラム |
| JP7262674B2 (ja) * | 2020-06-10 | 2023-04-21 | 三菱電機株式会社 | 車両照明制御装置および車両照明制御方法 |
| JPWO2024084647A1 (ja) * | 2022-10-20 | 2024-04-25 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3228086B2 (ja) * | 1995-09-11 | 2001-11-12 | 三菱自動車工業株式会社 | 運転操作補助装置 |
| JP2001091618A (ja) * | 1999-09-27 | 2001-04-06 | Mazda Motor Corp | 車両の制御装置 |
| JP2001347883A (ja) * | 2000-06-08 | 2001-12-18 | Stanley Electric Co Ltd | 照射方向可変ヘッドランプ装置 |
| JP2002274218A (ja) * | 2001-03-19 | 2002-09-25 | Nissan Motor Co Ltd | 車両用表示装置 |
| JP2006021633A (ja) * | 2004-07-07 | 2006-01-26 | Koito Mfg Co Ltd | 車両用照明システム |
| JP4749020B2 (ja) * | 2005-04-01 | 2011-08-17 | トヨタ自動車株式会社 | 車両用前照灯装置 |
| JP2006341713A (ja) * | 2005-06-08 | 2006-12-21 | Sumitomo Electric Ind Ltd | ヘッドライト照射方向変更システム、及びヘッドライト照射方向変更方法 |
-
2008
- 2008-06-20 JP JP2008161208A patent/JP5125798B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010000893A (ja) | 2010-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5125798B2 (ja) | 車両の前照灯制御装置 | |
| JP6346614B2 (ja) | 情報表示システム | |
| JP5353999B2 (ja) | 運転者支援装置 | |
| JP6486474B2 (ja) | 表示制御装置、表示装置及び表示制御方法 | |
| JP4722777B2 (ja) | 障害物認識判定装置 | |
| JP6075331B2 (ja) | 車両用照明装置 | |
| JP4943367B2 (ja) | 車両用情報表示装置 | |
| JP2017159699A (ja) | 車両用照明装置 | |
| JP2009301400A (ja) | 運転支援システム、運転支援方法及び運転支援プログラム | |
| JPWO2010073333A1 (ja) | 運転支援装置 | |
| US9056581B2 (en) | On-vehicle light distribution control system | |
| JP2019051791A (ja) | 車両の路面判定装置 | |
| JP2019096117A (ja) | 車両の制御装置 | |
| JP2006293539A (ja) | 走行支援装置 | |
| JP2011191238A (ja) | 運転支援装置 | |
| JP2006221536A (ja) | 車両用表示装置 | |
| JP5003593B2 (ja) | 車両用ライト制御装置及び車両用ライト制御プログラム | |
| JP6448714B2 (ja) | 情報表示システム | |
| JP2007030603A (ja) | 車両用走行支援装置 | |
| JP2008296759A (ja) | 情報処理装置および方法、並びにプログラム | |
| JP2009184640A (ja) | 車両の前照灯装置 | |
| JP2009116394A (ja) | 車両の警報装置 | |
| KR101839978B1 (ko) | 차량의 주행 상태를 판단하기 위한 장치 및 방법 | |
| JP2017001453A (ja) | 前照灯制御装置および前照灯制御方法 | |
| JP2008249634A (ja) | 対象物検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110523 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120522 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120703 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121015 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5125798 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151109 Year of fee payment: 3 |