JP2004164187A - 車両用報知装置 - Google Patents
車両用報知装置 Download PDFInfo
- Publication number
- JP2004164187A JP2004164187A JP2002328172A JP2002328172A JP2004164187A JP 2004164187 A JP2004164187 A JP 2004164187A JP 2002328172 A JP2002328172 A JP 2002328172A JP 2002328172 A JP2002328172 A JP 2002328172A JP 2004164187 A JP2004164187 A JP 2004164187A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- notification
- contact possibility
- possibility
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






















Abstract
【課題】運転者に煩わしさを感じさせることなく接触可能性を報知できる。
【解決手段】朝日或いは西日があたる場合(ステップS11)又は夜間走行している場合(ステップS12)、車間時間基準の警告音用しきい値THW_W_Thを通常時のしきい値よりも大きいしきい値ThTHWW_1に設定し、衝突時間基準の警告音用しきい値TTC_W_Thを通常時のしきい値よりも大きいしきい値ThTCCW_1に設定する。これにより、自車両に朝日或いは西日があたる場合、又は自車両が夜間走行している場合には、制動力による接触可能性の報知の報知タイミングを通常時のタイミングに維持しながら、警報音の出力タイミングについては通常時よりも早くする。
【選択図】 図11
【解決手段】朝日或いは西日があたる場合(ステップS11)又は夜間走行している場合(ステップS12)、車間時間基準の警告音用しきい値THW_W_Thを通常時のしきい値よりも大きいしきい値ThTHWW_1に設定し、衝突時間基準の警告音用しきい値TTC_W_Thを通常時のしきい値よりも大きいしきい値ThTCCW_1に設定する。これにより、自車両に朝日或いは西日があたる場合、又は自車両が夜間走行している場合には、制動力による接触可能性の報知の報知タイミングを通常時のタイミングに維持しながら、警報音の出力タイミングについては通常時よりも早くする。
【選択図】 図11
Description
【0001】
【発明の属する技術分野】
本発明は、自車両と自車両の前方物体との接触可能性に応じて減速制御を行い接触可能性を報知する車両用報知装置に関する。
【0002】
【従来の技術】
自車両が自車両の前方物体(例えば前方車両)に接触するのを防ぐ目的で運転者に接触可能性の報知を行う技術がある(例えば特許文献1参照)。このような接触可能性を報知する技術では、レーザレーダや電波式レーダ等によって前方物体を検出し、その検出した前方物体との接触可能性に基づいて警報音出力や減速制御等により接触可能性の報知を行っている。このように警報音出力や減速制御等の警報動作を行うことで、自車両が前方物体に接触してしまうことを軽減又は防止をしている。
【0003】
【特許文献1】
特開平9−286313号公報
【0004】
【発明が解決しようとする課題】
従来技術では、走行環境にかかわらず一定の減速制御を行っている。例えば、前記特許文献1に記載の技術では、車速にかかわりなく運転者が同等の減速ショックを感じることができるように、車速が大きくなるほど車両の減速度を大きくしている。このように、車速に応じて減速度を変化させるようにはしているが、走行環境に基づいて減速制御を変化させるようにはなっていない。この結果、接触可能性の報知のための減速制御が却って運転性を悪くし、これが運転者に煩わしさを感じさせてしまう場合がある。
【0005】
本発明は、前述の実情に鑑みてなされたものであり、運転者に煩わしさを感じさせることなく接触可能性を報知することができる車両用報知装置の提供を目的とする。
【0006】
【課題を解決するための手段】
前述の問題を解決するために、本発明に係る車両用報知装置は、自車両が前方に存在する物体に接触する可能性を接触可能性検出手段により検出し、前記接触可能性検出手段が検出した接触可能性に基づいて、駆動トルク又は制動トルクの少なくとも一方を変化させて接触可能性の報知を第1の接触可能性報知手段により行い、前記接触可能性検出手段が検出した接触可能性に基づいて、前記第1の接触可能性報知手段とは異なる出力手段により接触可能性の報知を第2の接触可能性報知手段を行い、走行環境検出手段により走行環境を検出し、前記走行環境検出手段が検出した走行環境に基づいて、前記第1及び第2の接触可能性報知手段それぞれの報知タイミングをタイミング設定手段により設定する。
【0007】
【発明の効果】
本発明によれば、第1の接触可能性報知手段による接触可能性の報知タイミングと、第2の接触可能性報知手段による接触可能性の報知タイミングとを、走行環境に基づいて設定することで、第1及び第2の接触可能性報知手段の報知の仕方に応じた最適タイミングで、接触可能性の報知をすることができる。これにより、運転者に煩わしさを感じさせてしまうことを防止できる。
【0008】
【発明の実施の形態】
以下、本発明の実施の形態を図面を参照しながら詳細に説明する。
図1は、本発明に係る車両用報知装置が組み込まれている走行制御システムの構成を示す。
この走行制御システムは、レーダ装置30、車速センサ1、障害物検出処理装置2、ブレーキペダル3、アクセルペダル4、カメラ装置7、警報ブザー8、制動力制御装置20、駆動力制御装置10、コントローラ5及びエンジン6を備えている。なお、特に示すまでもなく、車両は他の構成、例えば操舵角センサ等も有している。
【0009】
駆動力制御装置10は、アクセル操作手段であるアクセルペダル4の操作状態に応じた駆動力を発生するようにエンジン6を制御するとともに、外部からの指令に応じて、発生させる駆動力を変化させるように構成されている。
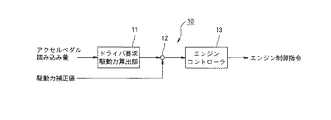
図2は、その駆動力制御装置10の構成をブロック図として示す。この駆動力制御装置10は、ドライバ要求駆動力算出部11、加算器12及びエンジンコントローラ13を備えている。
【0010】
ドライバ要求駆動力算出部11は、アクセルの操作量であるアクセルペダル4の踏み込み量(以下、アクセルペダル踏み込み量という。)に応じ運転者が要求する駆動力(以下、ドライバ要求駆動力という。)を算出する。例えば、ドライバ要求駆動力算出部11は、図3に示すようなアクセルペダル踏み込み量とドライバ要求駆動力との関係を定めた特性マップ(以下、ドライバ要求駆動力算出用マップという。)を用いて、アクセルペダル踏み込み量に対応するドライバ要求駆動力を得ている。そして、ドライバ要求駆動力算出部11は、求めたドライバ要求駆動力を加算器12を介してエンジンコントローラ13に出力する。なお、ドライバ要求駆動力算出用マップはドライバ要求駆動力算出部11が保持している。
【0011】
エンジンコントローラ13は、ドライバ要求駆動力を目標駆動力としてエンジン6への制御指令値を算出する。エンジン6はこの制御指令値に基づいて駆動される。また、駆動力制御装置10には、加算器12に駆動力補正量が入力されており、その駆動力補正量の入力がある場合には、エンジンコントローラ13には、加算器12でこの駆動力補正量が加算された補正後のドライバ要求駆動力からなる目標駆動力が入力される。
【0012】
このように、駆動力制御装置10は、ドライバ要求駆動力算出部11によりアクセルペダル踏み込み量に応じてドライバ要求駆動力を算出し、その一方で、駆動力補正量が別途入力された場合にはこの駆動力補正量を加算器12で加えた目標駆動力を得て、エンジンコントローラ13でその目標駆動力に応じた制御指令値を算出する。
【0013】
制動力制御装置20は、ブレーキ操作手段であるブレーキペダル3の操作状態に応じた制動力を発生するようにブレーキ液圧を制御するとともに、外部からの指令に応じて、発生させる制動力を変化させるように構成されている。
図4は、その制動力制御装置20の構成をブロック図として示す。この制動力制御装置20は、ドライバ要求制動力算出部21、加算器22及びブレーキ液圧コントローラ23を備えている。
【0014】
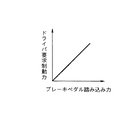
ドライバ要求制動力算出部21は、ブレーキの操作量であるブレーキペダル3の踏み込み力(以下、ブレーキペダル踏み込み力という。)に応じ運転者が要求する駆動力(以下、ドライバ要求制動力という。)を算出する。例えば、ドライバ要求制動力算出部21は、図5に示すように、ブレーキペダル踏み込み力とドライバ要求制動力との関係を定めた特性マップ(以下、ドライバ要求制動力算出用マップという。)を用いて、ブレーキペダル踏み込み力に対応するドライバ要求制動力を得ている。そして、ドライバ要求制動力算出部21は、求めたドライバ要求制動力を加算器22を介してブレーキ液圧コントローラ23に出力する。なお、ドライバ要求制動力算出用マップはドライバ要求制動力算出部21が保持している。
【0015】
ブレーキ液圧コントローラ23は、ドライバ要求制動力を目標制動力としてブレーキ液圧指令値を算出する。また、制動力制御装置20には、加算器22に制動力補正量が入力されており、その制動力補正量の入力がある場合には、ブレーキ液圧コントローラ23には、加算器22でこの制動力補正量が加算された補正後のドライバ要求制動力からなる目標制動力が入力される。
【0016】
このように、制動力制御装置20は、ドライバ要求制動力算出部21によりブレーキペダル踏み込み力に応じてドライバ要求制動力を算出し、その一方で、制動力補正量が別途入力された場合にはこの制動力補正量を加算器22で加えた目標駆動力を得て、ブレーキ液圧コントローラ23で目標制動力に応じたブレーキ液圧指令値を算出する。
【0017】
レーダ装置30は、図1に示すように、車両前部に搭載されており、前方物体までの距離を算出するように構成されている。
図6はレーダ装置30の構成を示す。レーダ装置30は、赤外線レーザ光を出射する発光部31と、その反射光を受光し、その受光に応じた電圧を出力する受光部32とを備え、発光部31と受光部32とが隣接して配置された構成になっている。ここで、発光部31は、図6中に矢印Aとして示す方向に振れるように構成され、スキャニング機構が組み合わされたものになっている。そして、発光部31は、角度を変化させながら所定角度範囲内で順次発光するようになっている。このレーダ装置30は、当該発光部31のレーザ光の出射から受光部32における受光までの時間差に基づいて自車両から前方障害物200までの距離を計測する。
【0018】
このようなレーダ装置30は、発光部31をスキャニング機構によりスキャニングしながら、各スキャニング位置或いはスキャニング角度について、反射光を受光しているか否かの判定を行い、反射光を受光した場合に前方障害物200までの距離を算出する。さらに、レーダ装置30は、前方障害物200を検出したときのスキャニング角と前記前方障害物200までの距離とに基づき、自車両に対する当該前方障害物200の左右方向の位置も算出する。すなわち、レーダ装置30は、自車両に対する障害物200の相対的な位置をも特定するように構成されている。
【0019】
図7は、このレーダ装置30がスキャニングして得た障害物の検出結果の一例を示す。各スキャニング角で自車両に対しての障害物の相対的な位置を特定することで、図7に示すように、スキャニング範囲内で検出できる複数の物体についての平面的な存在状態図を得ることができる。
なお、レーダ装置30は、発光部31が赤外線を使った光式のものに限定されるものではなく、発光部31がマイクロ波やミリ波等を使った電波式のものであってもよく、また、ビデオ画像を処理することによって前方障害物200を検出するように構成されているものであってもよい。レーダ装置30は、以上のようにして検出した結果を障害物検出処理装置2に出力する。
【0020】
障害物検出処理装置2は、レーダ装置30の検出結果に基づいて前方障害物200の情報を得るように構成されている。具体的には、障害物検出処理装置2は、レーダ装置30からスキャニング周期毎(或いはスキャンニング角度毎)に出力される物体の存在状態同士を比較し、物体の動きを判別するとともに、検出した物体間の近接状態や動きの類似性等の情報に基づいてこれら物体が同一物体であるか異なる物体であるかを判別する。
【0021】
この処理により、障害物検出処理装置2は、自車両からその物体(前方障害物)までの前後方向距離X(m)、自車両に対する物体の左右方向距離Y(m)、その物体の幅W(m)、さらに、自車両の走行速度とその物体の移動速度(走行速度)との相対速度ΔV(m/s)を得ている。そして、障害物検出処理装置2は、複数の物体を特定した場合には、各物体についてそれらの情報を得ている。障害物検出処理装置2は、これら情報を所定の時間周期でコントローラ5に出力する。
【0022】
カメラ装置7は、車両がの走行環境を撮像するものであり、例えば車両前部に搭載される、例えばCCD(Charge Coupled Device)カメラである。カメラ装置7で撮像された撮像画像は、コントローラ5に出力される。
警報ブザー8は、警告音を出力する。走行制御システムでは、車両に制動力を作用させて接触可能性の報知をするように構成されているが、この制動力による接触可能性の報知とともに、接触可能性がある場合にはこの警報ブザー8から警告音を出力する。警報ブザー8は、コントローラ5からの制御信号により制御されている。
【0023】
コントローラ5は、車両について各種制御を行うように構成されている。本実施の形態では、コントローラ5の機能を特に本発明に係るものに限定して説明する。すなわち、コントローラ5は、車速センサ1からの車速情報、前記障害物検出処理装置2の検出結果、及びアクセルペダル4の操作状態情報等といった各種情報が入力されており、これらの情報に基づいて指令信号を演算し、求めた指令信号を前記駆動力制御装置10及び制動力制御装置20にそれぞれに出力する。
【0024】
ここで、図8を用いて、コントローラ5の処理手順を説明する。コントローラ5は、この図8に示す処理をタイマ割り込みによって一定時間毎に呼び出すサブルーチンとして実行している。
先ずステップS1において、コントローラ5は、車速センサ1及び図示しない舵角センサから車速データ及び舵角データを取込む。ここで、車速センサ1及び舵角センサは、それぞれ回転に応じた所定間隔のパルスを出力するエンコーダであり、コントローラ5は、これらセンサからのパルス数をカウントし、これを積算することで操舵角δ(rad)及び自車速Vh(m/s)を算出する。コントローラ5は、この結果を図示しないメモリに格納する。
【0025】
続いてステップS2において、コントローラ5は走行環境情報を取り込む。
具体的には、走行環境情報として、自車両が走行している環境について、「朝日又は西日があたっている」、「夜」、「低μ路」、「雨」、「霧」、「降坂路」及び「登坂路」などの情報を取り込む。
ここで、走行環境としての「朝日又は西日があたっている」や「夜」の検出は、例えば、カメラ装置7による撮像データに基づいて行い、例えば撮像画像の輝度等を参照して行う。また、走行環境としての「低μ路」の検出は、例えば、TCS(トラクションコントロールシステム)の作動状態に基づいて行い、すなわち、TCSが作動している場合には、「低μ路」と判断する。また、走行環境としての「降坂路」や「登坂路」の検出は、例えば、駆動力と実際の自車速との関係に基づいて行い、すなわち、駆動力に対して実際の自車速が大きい場合には「降坂路」と判断し、駆動力に対して実際の自車速が小さい場合には「登坂路」と判断する。また、走行環境としての「雨」の検出は、ワイパー操作スイッチの操作状態に基づいて行う。また、「霧」の検出については、フォグランプの点灯状態に基づいて行う。
【0026】
続いてステップS3において、コントローラ5は障害物情報を取り込む。すなわち、コントローラ5は、障害物検出処理装置2の検出結果である前後方向距離X(m)、左右方向距離Y(m)、物体幅W(m)及び相対速度ΔV(m/s)を取込む。コントローラ5は、例えば障害物検出処理装置2との間の情報交換をシリアル通信のような一般的な通信処理で行っている。そして、コントローラ5は、取り込んだこれら情報をメモリに格納する。
【0027】
続いてステップS4において、コントローラ5は、取り込んだ自車速Vh及び操舵角δに基づいて次のような自車進路予測を行う。
自車速Vh及び操舵角δに応じて車両の旋回曲率ρ(1/m)を与える式は一般に下記(1)式として知られている。
ρ={1/(1+A・Vh2)}・(δ/N) ・・・(1)
ここで、Lは自車両のホイールベースであり、Aは車両に応じて定められたスタビリティー・ファクタと呼ぶ正の定数であり、Nはステアリングギア比である。
【0028】
ここで、旋回半径Rは、旋回曲率ρを用いて下記(2)式として示すことができる。
R=1/ρ ・・・(2)
この旋回半径Rを用いることで、図9に示すように、自車両300から当該自車両300の方向と鉛直にRだけ離れた位置(図9では右方向に離れている位置)にある点を中心とした半径Rの円弧として、自車両の進路を予測できる。
【0029】
なお、以下の説明では、操舵角δは、右方向に操舵された場合に正値をとり、左方向に操舵された場合に負値をとるものとし、旋回曲率及び旋回半径については、操舵角δが正値をとる場合に右旋回、操舵角δが負値をとる場合に左旋回を意味するものとする。
さらに、このような予測進路を車幅或いは車線幅を考慮したものに変換する。すなわち、前述した予測進路はあくまでも自車の進行方向を予測した軌道にすぎないので、車幅或いは車線幅を考慮して自車両が走行するであろう領域を決定する必要がある。図10は、それらを考慮することで得た予測走路を示す。この図10に示す予測走路は、前述した予測進路に自車両300の幅Twを加えて得たものである。すなわち、前記予測進路と同一点を中心とし半径がR−Tw/2の円弧と半径がR+Tw/2の円弧とで囲まれる領域として、自車両の予測進路を得る。
【0030】
なお、操舵角δを用いる代わりにヨーレートγを用いて、自車両の予測進路を、そのヨーレートγと自車速Vhとの関係として下記(3)式により得てもよい。
R=Vh/γ ・・・(3)
或いは、横加速度Ygと自車速Vhとの関係として自車両の予測進路を下記(4)式により得てもよい。
【0031】
R=Vh2/Yg ・・・(4)
なお、以下の説明は、最初に説明した自車速Vhと操舵角δとの関係に基づいて予測進路を求めていた場合を前提にした説明とする。
ステップS4においてこのような自車両の進路予測を行った後、コントローラ5は、ステップS5において、取り込んだ物体(障害物)についての情報からそれらの物体が前記予測走路の走路上にあるか否かを判定する。そして、走路上に障害物がある場合には、その障害物を対象として、ステップS6以降の処理で接触の可能性判断処理を行う。このような処理により、自車両に対して非常に近い位置にある物体であっても、前述のように決定した自車両の予測走路から外れているものは、接触可能性のある対象として取り扱われないようになる。
【0032】
ステップS6では、コントローラ5は、接触の可能性を判断するために、下記(5)式により自車両と障害物との間の車間距離Xを自車速Vhで除した車間時間THWを算出し、また、下記(6)式により自車両と障害物との間の車間距離Xを相対速度Vr(ΔV)で除した衝突時間TTCを算出する。
THW=X/Vh ・・・(5)
TTC=X/Vr ・・・(6)
また、前記ステップS5において前記予測走路の走路上に複数の物体があるとされた場合には、各物体について、車間時間THW及び衝突距離TTCを得る。
【0033】
続いてステップS7において、コントローラ5は、車間距離THWが最小となる物体(障害物)、さらには衝突時間TTCが最小となる物体(障害物)をそれぞれ選択する。
続いてステップS8において、コントローラ5はしきい値設定処理を行う。図11及び図12は、このしきい値設定処理の処理手順を示す。
【0034】
先ず図11に示すステップS11において、コントローラ5は、朝日又は西日があたっているか否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「朝日又は西日があたっている」か否かを判定する。ここで、コントローラ5は、朝日又は西日があたっている場合、ステップS13に進み、朝日も西日もあたっていない場合、ステップS12に進む。
【0035】
ステップS12では、コントローラ5は、走行環境が夜か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「夜」か否かを判定する。ここで、コントローラ5は、走行環境が夜の場合、ステップS13に進み、走行環境が夜でない場合、図12に示すステップS14に進む。
ステップS13では、コントローラ5は、次のようなしきい値設定をする。 車間時間THWに基づいて警告音の出力タイミングを規定するしきい値(以下、車間時間基準の警告音用しきい値という。)THW_W_Thをしきい値ThTHWW_1に設定し(THW_W_TH=ThTHWW_1)、衝突時間TTCに基づいて警告音の出力タイミングを規定するしきい値(以下、衝突時間基準の警告音用しきい値という。)TTC_W_Thをしきい値ThTCCW_1に設定する(TTC_W_TH=ThTTCW_1)。
【0036】
ここで、しきい値ThTHWW_1は、後述の通常時の値ThTHWW_0よりも大きい値であり(ThTHWW_1>ThTHWW_0)、しきい値ThTTCW_1は、後述の通常時の値ThTTCW_0よりも大きい値である(ThTTCW_1>ThTTCW_0)。コントローラ5は、このようなしきい値設定をして、図12に示すステップS14に進む。
【0037】
なお、車間時間基準の警告音用しきい値THW_W_Thと車間時間THWとの関係及び衝突時間基準の警告音用しきい値TTC_W_Thと衝突時間TTCとの関係については後で詳述する。
図12に示すステップS14では、コントローラ5は、走行している道路が低μ路か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「低μ路」か否かを判定する。ここで、コントローラ5は、走行している道路が低μ路の場合、ステップS19に進み、走行している道路が低μ路でない場合、ステップS15に進む。
【0038】
ステップS19では、コントローラ5は、次のようなしきい値設定をする。 車間時間THWの比較に用いるしきい値(以下、車間時間用しきい値という。)
THW_Thをしきい値ThTHW_1に設定し(THW_Th=ThTHW_1)、衝突時間TTCの比較に用いるしきい値(以下、衝突時間用しきい値という。)TTC_Thをしきい値ThTTC_1に設定し(TTC_Th=ThTTC_1)、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_1に設定し(THW_W_TH=ThTHWW_1)、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_1に設定する(TTC_W_TH=ThTTCW_1)。
【0039】
ここで、しきい値ThTHW_1は、後述の通常時の値ThTHW_0よりも大きい値であり(ThTHW_1>ThTHW_0)、しきい値ThTTC_1は、後述の通常時の値ThTTC_0よりも大きい値である(ThTTC_1>ThTTC_0)。コントローラ5は、このようなしきい値設定をして、当該図11及び図12に示す処理を終了する。
【0040】
ステップS15では、コントローラ5は、走行環境が雨又は霧か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「雨又は霧」か否かを判定する。ここで、コントローラ5は、走行環境が雨又は霧の場合、前記ステップS19に進み、走行環境が雨でも、霧でもない場合、ステップS16に進む。
【0041】
ステップS16では、コントローラ5は、走行している道路が降坂路か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「降坂路」か否かを判定する。ここで、コントローラ5は、走行している道路が降坂路の場合、前記ステップS19に進み、走行している道路が降坂路でない場合、ステップS17に進む。
【0042】
ステップS17では、コントローラ5は、走行している道路が登坂路か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「登坂路」か否かを判定する。ここで、コントローラ5は、走行している道路が登坂路の場合、ステップS20に進み、走行している道路が登坂路でない場合、ステップS18に進む。
【0043】
ステップS18では、コントローラ5はしきい値設定をする。このしきい値設定では次のように通常時の値の設定をする。
車間時間用しきい値THW_Thを通常時のしきい値ThTHW_0に設定し(THW_Th=ThTHW_0)、衝突時間用しきい値TTC_Thを通常時のしきい値ThTTC_0に設定し(TTC_Th=ThTTC_0)、車間時間基準の警告音用しきい値THW_W_Thを通常時のしきい値ThTHWW_0に設定し(THW_W_TH=ThTHWW_0)、衝突時間基準の警告音用しきい値TTC_W_Thを通常時のしきい値ThTCCW_0に設定する(TTC_W_TH=ThTTCW_0)。コントローラ5は、このようなしきい値設定をして、当該図11及び図12に示す処理を終了する。
【0044】
ステップS20では、コントローラ5は、次のようなしきい値設定をする。
車間時間用しきい値THW_Thをしきい値ThTHW_2に設定し(THW_Th=ThTHW_2)、衝突時間用しきい値TTC_Thをしきい値ThTTC_2に設定し(TTC_Th=ThTTC_2)、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_2に設定し(THW_W_TH=ThTHWW_2)、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_2に設定する(TTC_W_TH=ThTTCW_2)。
【0045】
ここで、しきい値ThTHW_2は、通常時の値ThTHW_0よりも小さい値であり(ThTHW_2<ThTHW_0)、しきい値ThTTC_2は、通常時の値ThTTC_0よりも小さい値であり(ThTTC_2<ThTTC_0)、しきい値ThTHWW_2は、通常時の値ThTHWW_0よりも小さい値であり(ThTHWW_2<ThTHWW_0)、しきい値ThTTCW_2は、通常時の値ThTTCW_0よりも小さい値である(ThTTCW_2<ThTTCW_0)。コントローラ5は、このようなしきい値設定をして、当該図11及び図12に示す処理を終了する。
【0046】
なお、前述の処理手順では、朝日又は西日があたっている場合や走行環境が夜の場合に対応するしきい値の設定(前記ステップS13)を行い、その後、走行している道路が低μ路の場合、雨或いは霧の場合、又は走行している道路が降坂路の場合に対応するしきい値の設定(前記ステップS19)、走行している道路が登坂路の場合に対応するしきい値の設定(前記ステップS20)、通常時に対応するしきい値の設定(前記ステップS18)を行っている。このような場合には、ステップS13でしきい値を設定した場合でも、その後、ステップS18、ステップS19及びステップS20の処理でしきい値を設定するので、実質的に、ステップS13のしきい値の設定が意味をなさなくなる。
【0047】
このようなことから、ステップS13でしきい値の設定をした場合には、最終的なしきい値の設定(前記ステップS18、ステップS19及びステップS20)は、そのステップS13の設定を考慮して行うようにする。例えば、ステップS13の設定を優先的に有効にしたり、又は、ステップS13で設定したしきい値と、ステップS18、ステップS19或いはステップS20で設定したしきい値とを考慮した新たなしきい値を最終的に設定する、といったようにである。なお、以下の説明では、ステップS13でしきい値を設定した場合、当該ステップS13のしきい値の設定を優先的に有効にするようにしている。
【0048】
以上のように、コントローラ5は、ステップS8におけるしきい値設定処理を行う。
続いて図8のステップS9において、コントローラ5は、車間時間THWが最小である物体の当該車間時間THWと前記ステップS8で設定した車間時間用しきい値THW_Thとを比較して補正量を算出し、また、衝突時間TTCが最小である物体の当該衝突時間TTCと前記ステップS8で設定した衝突時間用しきい値TTC_Thとを比較して補正量を算出する。
【0049】
補正量の算出処理では次のような仮定から補正量を算出している。
図13中(A)に示すように、自車両300と前方に存在する物体である前方車両(先行車両)400との間であり、自車両300の前方に、仮想的な弾性体(以下、仮想弾性体という。)500があるモデルを仮定している。そして、このモデルでは、自車両300と前方車両400との間隔がある距離以下になったときに、仮想弾性体500が前方車両400に当たり圧縮され、この圧縮力が仮想弾性体500の反発力として自車両300に擬似的な走行抵抗として作用するようにしている。
【0050】
このモデルにおける仮想弾性体500の長さL_THW(l)は、自車速Vh及び車間時間用しきい値THW_Thに関連付けて下記(7)式として与えている。
L_THW=THW_Th×Vh ・・・(7)
そして、この長さL_THW(l)の仮想弾性体500の弾性係数(前記車間時間用制御ゲイン)をk_THW(k)と仮定し、図13中(B)に示すように、自車両300に対して仮想弾性体500の長さL_THW(l)の範囲内に前方車両400が位置された場合に前後方向距離(弾性変位)Xに応じて変化するものとして、仮想弾性体500による第1の反発力F_THWを下記(8)式として与える。
【0051】
F_THW=k_THW×(L_THW−X) ・・・(8)
このモデルによれば、自車両300と前方車両400との間の距離が基準長さL_THW(l)より短い場合、弾性係数k_THWを有する仮想弾性体500により第1の反発力F_THWが発生することになる。ここで、弾性係数k_THWは、前述したように制御ゲインであり、制御によって適切な警報効果が得られるように調整される制御パラメータとなる。
【0052】
以上のような関係から、車間距離が長い、すなわち
X>L_THW
の場合、仮想弾性体500は圧縮されないため、第1の反発力F_THWは発生しない。すなわち、
F_THW=0
となる。一方、車間距離が短い場合、補正量として仮想弾性体500の第1の反発力F_THWは前後方向距離Xに応じて前記(8)式により算出できる。
【0053】
また、前述のモデルでは、仮想弾性体(以下、第1の仮想弾性体という。)500の長さL_THW(l)を自車速Vh及び車間時間用しきい値THW_Thに関連付けて得ているが、これと同様に、衝突時間用しきい値TTC_Thに関連付けて長さがL_TTCである仮想的な弾性体(以下、第2の仮想弾性体という。)のモデルも想定できる。図14には、前記第1の仮想弾性体501を含めてその第2の仮想弾性体502のモデルを示す。
【0054】
この第2の仮想弾性体502については、相対速度Vrに応じて衝突時間用しきい値TTC_Thに関連付けて記(9)式として第2の仮想弾性体の長さL_TTCを与える。
L_TTC=TTC_Th×Vr ・・・(9)
そして、この長さL_TTC(l)の第2の仮想弾性体502の弾性係数(前記衝突時間用制御ゲイン)をk_TTC(k)と仮定し、図13中(B)に示すように、自車両300に対して第2の仮想弾性体502の長さL_TTC(l)の範囲内に前方車両400が位置された場合に前後方向距離(弾性変位)Xに応じて変化するものとして、第2の仮想弾性体502による第2の反発力F_TTCを下記(10)式として与える。
【0055】
F_TTC=k_TTC×(L_TTC−X) ・・・(10)
このモデルによれば、自車両300と前方車両400との間の距離が基準長さL_TTC(l)より短い場合、弾性係数k_TTCを有する第2の仮想弾性体502により第2の反発力F_TTCが発生することになる。ここで、弾性係数k_THWは、前述したように制御ゲインであり、制御によって適切な警報効果が得られるように調整される制御パラメータである。
【0056】
以上のような関係から、相対速度が小さく、車間距離が長い場合、すなわち、
X>L_TTC
の場合、第2の仮想弾性体502は圧縮されないため、第2の反発力F_TTCは発生しない。すなわち、
F_TTC=0
となる。一方、相対速度が大きく、車間距離が短い場合、
L_TTC>X
となり、補正量として第2の仮想弾性体502の第2の反発力F_TTCは、前後方向距離Xに応じて前記(10)式により算出できる。
【0057】
以上のようにモデルを仮定し、長さL_THWの第1の仮想弾性体501により第1の反発力F_THWを算出し、長さL_TTCの第2の仮想弾性体502により第2の反発力F_TTCを算出している。
そして、以上のように算出した第1及び第2の反発力F_THW,F_TTCのうち、大きい方の値を最終的な補正値Fcとして決定する。
【0058】
図15は、以上のような補量算出処理の処理手順を示す。なお、この処理手順では、基本的には前述の考え方と同様であるが、車間時間THWと車間時間用しきい値THW_Thとの関係、或いは衝突時間TTCと衝突時間用しきい値TTC_Thとの関係に基づいて、最終的な補正値Fcを得るような処理になっている。
【0059】
すなわち、先ずステップS31において、コントローラ5は、車間時間THWが車間時間用しきい値THW_Th未満であるか否かを判定し、車間時間THWが車間時間用しきい値THW_Th未満の場合、ステップS32に進み、車間時間THWが車間時間用しきい値THW_Th以上の場合、ステップS33に進む。
【0060】
ステップS32では、コントローラ5は、前記(8)式から前後方向距離Xに応じた第1の反発力F_THWを算出し、ステップS34に進む。一方、ステップS33では、コントローラ5は、第1の反発力F_THWを0として、ステップS34に進む。
ステップS34では、コントローラ5は、衝突時間TTCが衝突時間用しきい値TTC_Th未満であるか否かを判定し、衝突時間TTCが車間時間用しきい値TTC_Th未満の場合、ステップS35に進み、衝突時間THWが車間時間用しきい値THW_Th以上の場合、ステップS36に進む。
【0061】
ステップS35では、コントローラ5は、前記(10)式から前後方向距離Xに応じた第2の反発力F_TTCを算出し、ステップS37に進む。一方、ステップS36では、コントローラ5は、第2の反発力F_TTCを0として、ステップS37に進む。
ステップS37では、コントローラ5は、以上のように算出した第1及び第2の反発力F_THW,F_TTCのうち、大きい方の値を最終的な補正値Fcとして決定する。
【0062】
以上のように、ステップS9において、コントローラ5は補正量Fcを算出する。
そして、コントローラ5は、ステップS10において、このようにして得た補正量Fcを駆動力制御装置10や制動力制御装置20に出力する。
図16は、その補正量出力処理の処理手順を示す。
【0063】
先ずステップS41において、コントローラ5は、予め読み込んでいるアクセルペダル踏み込み量の情報に基づいてストローク変位量を得る。
続いてステップS42において、コントローラ5は、このストローク変位量に基づいて運転者が要求する駆動力であるドライバ要求駆動力Fdを推定する。具体的には、コントローラ5は、駆動力制御装置10がドライバ要求駆動力算出用に使用しているドライバ要求駆動力算出用マップ(図3)と同一のマップを使用して、アクセルペダル踏み込み量に応じたドライバ要求駆動力Fdを推定する。
【0064】
続いてステップS43において、コントローラ5は、推定したドライバ要求駆動力Fdと前記補正量Fcとを比較して、その大小関係を得る。すなわち、コントローラ5は、ドライバ要求駆動力Fdが補正量Fc以上であるか否かを判定し、ドライバ要求駆動力Fdが補正量Fc以上である場合(Fd≧Fc)、ステップS44に進み、ドライバ要求駆動力Fdが補正量Fc未満である場合(Fd<Fc)、ステップS46に進む。
【0065】
コントローラ5は、ステップS44において、駆動力補正量として前記補正量Fcを駆動力制御装置10に出力し、さらに、ステップS45において、制動力補正量として0を制動力制御装置20に出力する。
一方、コントローラ5は、ステップS46において、駆動力補正量としてドライバ要求駆動力Fdの負値(−Fd)を駆動力制御装置10に出力し、さらに、ステップS47において、前記補正量Fcからドライバ要求駆動力Fdを引いた値(Fc−Fd)を制動力補正量として制動力制御装置20に出力する。
【0066】
このようなコントローラ5の補正量出力処理により、駆動力制御装置10では、コントローラ5からの駆動力補正量をドライバ要求駆動力に加算した値として目標駆動力を得て、制動力制御装置20では、コントローラ5からの制動力補正量をドライバ要求制動力に加算した値として目標制動力を得る。
なお、このように目標駆動力や目標制動力を補正量Fcを用いて得ており、前述したように、その補正量Fcは第1及び第2の反発力F_THW,F_TTCにより決定されている。そして、第1及び第2の反発力F_THW,F_TTCは、前記(8)式や(10)式に示したように、弾性係数k_THW,k_TTCの乗算値として得ている。このようなことから、弾性係数k_THW,k_TTCは目標駆動力や目標制動力、或いは補正量Fcの制御ゲインとなる。
【0067】
続いてステップS11において、コントローラ5は警報音出力処理を行う。図17は、この警報音出力処理の処理手順を示す。
先ずステップ51において、コントローラ5は、車間時間THWが車間時間基準の警告音用しきい値THW_W_Th未満か否か、及び衝突時間TTCが衝突時間基準の警告音用しきい値TTC_W_Th未満か否かを判定し、車間時間THWが車間時間基準の警告音用しきい値THW_W_Th未満、又は衝突時間TTCが衝突時間基準の警告音用しきい値TTC_W_Th未満の場合、ステップS52に進み、それ以外の場合、当該図17に示す処理を終了する。
【0068】
ステップS52では、コントローラ5は、警報ブザー8に制御信号を出力して、警報ブザー8を作動させる。そして、コントローラ5は、当該図17に示す処理を終了する。
以上のようにコントローラ5は種々の処理を行っている。
以上のような構成により、走行制御システムは、駆動力制御装置10によりアクセルペダル4の操作状態に応じた駆動力を発生するようにエンジン6を制御するとともに、制動力制御装置20によりブレーキペダル3の操作状態に応じた制動力を発生するようにブレーキを制御している。
【0069】
その一方で、走行制御システムでは、接触可能性のある障害物の有無に応じてそのような各操作状態に応じた制御量を補正している。すなわち、走行制御システムでは、レーダ装置30の検出状態に応じて障害物検出処理装置2により得た自車両の前方の障害物の情報、車速センサ1からの自車速情報、及び操舵角センサからの操舵角情報等に基づいて、接触可能性のある障害物を特定するとともに、図20又は図21に示した制御量補正用のモデルを用いて前記特定した障害物との関係から補正量Fcを求め、その補正量Fcを利用して運転者の操作状態に応じた駆動力補正量及び制動力補正量をそれぞれ得て、これら駆動力補正量及び制動力補正量で補正した目標駆動力及び目標制動力によってエンジン6やブレーキ装置を制御している。さらに、走行制御システムでは、接触可能性がある場合、警報ブザー8により警報音を出力する。
【0070】
次に動作例を説明する。
走行制御システムは、自車進路予測を行い(前記ステップS4)、予測走路の走路上に障害物がある場合には、接触の可能性判断のための障害物を特定する(前記ステップS5〜ステップS7)。具体的には、予測走路の走路上にある障害物について車間時間THWと衝突時間TTCとを算出し、ここで複数の障害物がある場合には、各障害物について車間時間THWと衝突時間TTCとを算出し(前記ステップS5及びステップS6)、その車間時間THWと衝突時間TTCとから、車間距離THWが最小となる障害物、さらには衝突時間TTCが最小となる障害物を特定する(前記ステップS7)。
【0071】
そして、走行制御システムは、そのようにして求めた車間時間THWが最小である物体の当該車間時間THWと車間時間用しきい値THW_Thとを用いて補正量となる第1の反発力F_THWを求め、さらに衝突時間TTCが最小である物体の当該衝突時間TTCと衝突時間用しきい値TTC_Thとを用いて補正量となる第2の反発力F_TTCを求める(前記ステップS10)。
【0072】
具体的には、車間時間THWが車間時間用しきい値THW_Th未満の場合、すなわち車間時間が長い場合(車間距離が距離L_THWに達していない場合)、第1の反発力F_THWを0とする(前記ステップS33)。一方、車間時間THWが車間時間用しきい値THW_Th以上の場合、すなわち車間時間が短い場合(車間距離が距離L_THWに達している場合)、前記(8)式により、前記車間時間用しきい値THW_Th及び車間時間用制御ゲインk_THWを用いて、その時の車間距離に応じた値として第1の反発力F_THWを算出する(前記ステップS32)。
【0073】
また、衝突時間TTCが衝突時間用しきい値TTC_Th未満の場合、すなわち衝突時間が長い場合(車間距離が距離L_TTCに達していない場合)、第2の反発力F_TTCを0とする(前記ステップS36)。一方、衝突時間TTCが衝突時間用しきい値TTC_Th以上の場合、すなわち衝突時間が短い場合(車間距離が距離L_TTCに達している場合)、前記(10)式により、前記衝突時間用しきい値TTC_Th及び衝突時間用制御ゲインk_TTCを用いて、その時の車間距離に応じた値として第2の反発力F_TTCを算出する(前記ステップS35)。なお、車間時間用しきい値THW_Th及び衝突時間用しきい値TTC_Thについては、車間時間基準の警告音用しきい値THW_W_Thや衝突時間基準の警告音用しきい値TTC_W_Thのしきい値とともに、走行環境に基づいて設定するようにしているが、これらしきい値の設定値ごとの動作については後で詳述する。
【0074】
そして、走行制御システムは、第1及び第2の反発力F_THW,F_TTCのうち、大きい方の値を最終的な補正値Fcとして決定する(前記ステップS37)。走行制御システムは、このようにして得た補正量Fcに基づいて目標駆動力を決定し、エンジン6を駆動している(前記ステップS10)。
すなわち、走行制御システムは、アクセルペダル4が踏み込まれている場合において、アクセルペダル4の踏み込み量に対応するドライバ要求駆動力Fdが補正量Fc以上である場合、駆動力補正量として補正量Fcの負値−Fcを駆動力制御装置10に出力するとともに、制動力補正量として0を制動力制御装置20に出力する(前記ステップS44及びステップS45)。
【0075】
これにより、駆動力制御装置10側ではドライバ要求駆動力に前記負値−Fc分が加算された目標駆動力が得られ、この目標駆動力になるようにエンジン6が駆動される。この結果、運転者が要求した駆動力に対して実際の駆動力がFc分だけ小さくなり、これにより、運転者によるアクセルペダルの踏み込みに対して車両は鈍い加速挙動を示すようになる。よって、アクセルペダル4を踏んでいるにもかかわらず期待したほどの加速感が得られない状態になるので、このような鈍い加速挙動を接触可能性の報知として、運転者は、自車両が先行車両に接近していることを知ることになる。
【0076】
一方、走行制御システムは、アクセルペダル4の踏み込み量に対応するドライバ要求駆動力Fdの推定値が補正量Fc未満である場合、駆動力補正量として推定したドライバ要求駆動力Fdの負値−Fdを駆動力制御装置10に出力するとともに、補正量Fcから推定したドライバ要求駆動力Fdを引いた差分値(Fc−Fd)を制動力補正量として制動力制御装置20に出力する(前記ステップS46及びステップS47)。
【0077】
これにより、駆動力制御装置10側ではドライバ要求駆動力に前記負値−Fd分が加算された目標駆動力が得られ、この目標駆動力になるようにエンジン6が駆動され、その一方で、制動力制御装置20側ではドライバ要求制動力に前記差分値(Fc−Fd)が加算された目標制動力が得られ、この目標制動力になるようにブレーキの制御がなされる。これにより、運転者が要求した駆動力に対して実際の駆動力が略0になり、さらに、運転者が要求している制動力に対して実際の制動力が前記差分値(Fc−Fd)分だけ大きくなる。すなわち、ドライバ要求駆動力Fdが補正量Fc未満である場合(Fd<Fc)、駆動力制御装置10の制御のみでは目標とする反発力(補正量Fc)を得ることができないので、駆動力制御装置10にドライバ要求駆動力Fdの負値−Fdを駆動力補正量を出力する一方で、制動力補正装置20にその不足分として差分値(Fc−Fd)を出力して、反発力(補正量Fc)を得るようにしている。つまり、駆動力制御装置10と制動力補正装置20とにおけるそれぞれの過不足分を調整して、駆動力制御装置10と制動力補正装置20とを協働させて、システム全体として所望の反発力(Fc)を得るようにして、その反発力を走行抵抗として車両に作用させている。よって、アクセルペダル踏み込み量が所定量(Fc)に達していない場合には、運転者が要求している制動力に対しその不足分(Fc−Fd)だけ制動力が大きくなり、車両はその制動力により減速挙動を示すようになる。このような減速挙動を接触可能性の報知として、運転者は、自車両が先行車両に接近していることを知ることになる。
【0078】
なお、前述したように、アクセルペダル踏み込み量に対応するドライバ要求駆動力Fdが補正量Fc以上である場合(Fd≧Fc)、Fd−Fc≧0であるので、補正量Fcを駆動力補正量としてドライバ要求駆動力Fdを補正(減算)してもドライバ要求駆動力の差分が正値として残る。このようなことから、アクセルペダル踏み込み量に対応するドライバ要求駆動力Fdが補正量Fc以上である場合には、制動力補正量を0にして、制動力制御装置20の補正に頼らずに、補正量Fcの負値を駆動力補正量として与えて駆動力制御装置10のみで補正を行い、システム全体として所望の反発力を発生させて、その反発力を走行抵抗として車両に作用させているといえる。
【0079】
また、前述したように、減速制御の大きさを示すものとなる補正量Fcについては、車間時間に基づいて得た第1の反発力F_THWと衝突時間に基づいて得た第2の反発力F_TTCのうち、大きい方の値を採用している。このようにすることで、車間時間(すなわち車間距離)に起因して自車両が前方車両に接触可能性ある場合には、第1の反発力F_THWが大きくなり、この第1の反発力F_THWを補正量Fcとした接触可能性の報知のための減速制御が働くようになる。一方、衝突時間(すなわち相対速度)に起因して自車両が前方車両に接触可能性ある場合には、第2の反発力F_TTCが大きくなり、この第2の反発力F_TTCを補正量Fcとした接触可能性の報知のための減速制御が働くようになる。これにより、車間時間や衝突時間のいずれかに起因して、自車両が前方車両に接触する可能性がある場合に、接触可能性の報知が作動するようになり、さらには、その作動原因となった車間時間又は衝突時間に応じた反発力が作用するようになる。これにより、車間時間及び衝突時間の両方を基準に、自車両が前方車両に接触する可能性をみて、接触可能性の報知をすることができる。
【0080】
なお、前述したような補正量(反発力)Fcとドライバ要求駆動力(指示トルク)Fdとの関係から得られる車両動作を図18のように図示することができる。なお、アクセル開度を一定に保っていることを前提としている。また、補正量(反発力)Fcは、前記第1の反発力F_THW又は第2の反発力F_TTCである。
【0081】
自車両300が前方車両400に接近していき、その車間距離がある距離に達すると、図18中(B)に示すように、補正量(反発力)Fcが発生するとともに、車間距離の増加に応じて補正量(反発力)Fcが増加するようになる。一方、アクセル開度が一定であるので、ドライバ要求駆動力Fdは、図18中(A)に示すように、車間距離に依らず一定値をとる。
【0082】
この場合、図19中(C)に示すように、ドライバ要求駆動力Fdと補正量(反発力)Fcとの差分値(Fd−Fc)として得られる実制駆動力は、ある車間距離まではドライバ要求駆動力Fdそのものの値となるが、ある車間距離よりも短くなると減少するようになる。さらに、車間距離が短くなると、実制駆動力は負値に至る。このような場合において、実制駆動力が減少する領域で、その値が正値である領域では、駆動力制御装置10での駆動力制御量の補正により駆動トルクを低減し(前記ステップS44及びステップS45)、また、実制駆動力が減少する領域で、その値が負値となる領域では、駆動力制御装置10の制動力制御量を補正し、すなわちブレーキを作動させ、制動力を増加させている(前記ステップS46及びステップS47)。
【0083】
また、図19は、補正量Fcに基づいた補正による駆動力及び制動力の特性を簡便に示す。
この図19に示すように、アクセルペダル踏み込み量が多い場合、このアクセルペダル踏み込み量に応じた駆動力(ドライバ要求駆動力)を反発力算出補正量Fcにより減少方向に補正し(図中Bとして示す特性)、一方、アクセルペダル踏み込み量が少ない場合、このアクセルペダル踏み込み量に応じた駆動力(ドライバ要求駆動力)が発生しないように補正する(ドライバ要求駆動力を0にする)とともに(図中Cとして示す特性)、アクセルペダル踏み込み量の増加に対して減少する制動力が発生するように補正する(図中Dとして示す特性)。さらに、ブレーキペダル3が踏み込まれた場合、補正量Fcに基づいて制動力が増大する方向に補正し(図中Eとして示す特性)、全体として車両の走行抵抗が補正量Fcに相当するように増大させる。
【0084】
また、走行制御システムでは、以上のような制動力を車両に作用させて接触可能性の報知を行うとともに、警報音による接触可能性の報知も行う(前記ステップS11)。すなわち、走行制御システムでは、車間時間THWが車間時間基準の警告音用しきい値THW_W_Th未満、又は衝突時間TTCが衝突時間基準の警告音用しきい値TTC_W_Th未満の場合、警報ブザー8により警報音を出力する(前記ステップS51及びステップS52)。これにより、接触可能性がある場合に所定のタイミングで警報音が出力される。
【0085】
例えば、通常時において、すなわち車間時間基準の警告音用しきい値THW_W_Thを通常時のしきい値ThTHWW_0に設定し、衝突時間基準の警告音用しきい値TTC_W_Thを通常時のしきい値ThTTCW_0に設定している場合において、しきい値ThTHWW_0が車間時間用しきい値THW_Th用のしきい値ThTHW_0と同じ値であり(しきい値ThTHWW_0=しきい値ThTHW_0)、しきい値ThTTCW_0が衝突時間用しきい値TTC_Th用のしきい値ThTTC_0と同じ値である場合には(ThTTCW_0=ThTTC_0)、制動力による接触可能性の報知タイミングに警報音も出力するようになる。これにより、運転者は、車両が減速挙動を始めたことと、その減速挙動の開始タイミングで出力される警報音とにより、自車両が前方車両と接触する可能性があることを知ることができる。
【0086】
ここで、前述したように、走行制御システムでは、自車両の走行環境に基づいて各種しきい値を設定している(前記ステップS8)。具体的には次のようにである。
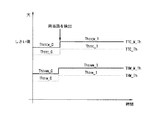
自車両に朝日或いは西日があたる場合、又は自車両が夜間走行している場合、図20及び図21に示すように、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_1(ThTHWW_1>ThTHWW_0)に設定し、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_1(ThTCCW_1>ThTCCW_0)に設定する(THW_W_TH=ThTHWW_1、TTC_W_TH=ThTTCW_1(ステップS13))。
【0087】
また、自車両が走行している道路が低μ路の場合、雨或いは霧のなかを走行している場合、又は自車両が走行している道路が降坂路の場合、図22、図23及び図24に示すように、車間時間用しきい値THW_Thをしきい値ThTHW_1(ThTHW_1>ThTHW_0)に設定し、衝突時間用しきい値TTC_Thをしきい値ThTTC_1(ThTTC_1>ThTTC_0)に設定し、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_1(ThTHWW_1>ThTHWW_0)に設定し、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_1(ThTCCW_1>ThTCCW_0)に設定する(THW_Th=ThTHW_1、TTC_Th=ThTTC_1、THW_W_TH=ThTHWW_1、TTC_W_TH=ThTTCW_1(ステップS19))。
【0088】
また、自車両が走行している道路が登坂路の場合、図25に示すように、車間時間用しきい値THW_Thをしきい値ThTHW_2(ThTHW_2<ThTHW_0)に設定し、衝突時間用しきい値TTC_Thをしきい値ThTTC_2(ThTTC_2<ThTTC_0)に設定し、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_2(ThTHWW_2<ThTHWW_0)に設定し、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_2(ThTCCW_2<ThTCCW_0)に設定する(THW_Th=ThTHW_2、TTC_Th=ThTTC_2、THW_W_TH=ThTHWW_2、TTC_W_TH=ThTTCW_2(ステップS20))。
【0089】
そして、走行環境が前述のいずれにも該当しない場合(通常時の場合)、すなわち、自車両に朝日又は西日があたっていない場合、夜間走行でない場合、自車両が走行している道路が低μ路でない場合、雨及び霧のなかを走行していない場合、及び自車両が走行している道路が平坦路の場合、車間時間用しきい値THW_Thを通常時のしきい値ThTHW_0に設定し、衝突時間用しきい値TTC_Thを通常時のしきい値ThTTC_0に設定し、車間時間基準の警告音用しきい値THW_W_Thを通常時のしきい値ThTHWW_0に設定し、衝突時間基準の警告音用しきい値TTC_W_Thを通常時のしきい値ThTCCW_0に設定する(THW_Th=ThTHW_0、TTC_Th=ThTTC_0、THW_W_TH=ThTHWW_0、TTC_W_TH=ThTTCW_0(ステップS18))。
【0090】
ここで、車間時間用しきい値THW_Thや衝突時間用しきい値TTC_Thは、制動力による接触可能性の報知タイミングを規定するものであり、また、衝突時間基準の警告音用しきい値TTC_W_Thや衝突時間基準の警告音用しきい値TTC_W_Thは警報音の出力タイミングを規定するものである。よって、自車両に朝日或いは西日があたる場合には、又は自車両が夜間走行している場合には、警報音の出力タイミングが通常時よりも早くなる。また、自車両が走行している道路が低μ路の場合、雨或いは霧のなかを走行している場合、又は自車両が走行している道路が降坂路の場合には、制動力による接触可能性の報知タイミングが通常時よりも早くなるとともに、警報音の出力タイミングが通常時よりも早くなる。さらに、自車両が走行している道路が登坂路の場合には、制動力による接触可能性の報知タイミングが通常時よりも遅くなるとともに、警報音の出力タイミングが通常時よりも遅くなる。
【0091】
このように、走行制御システムでは、自車両の走行環境に基づいて各種しきい値を変更することで、自車両の走行環境に応じたタイミングで、制動力による接触可能性の報知をしたり、警報音を出力したりする。
次に効果を説明する。
前述したように、前方車両への接近状態に応じて仮想的な弾性体の反発力を算出し、この反発力を絶対的な補正量として、この絶対的な補正量を実現するような駆動力補正量及び制動力補正量を駆動力制御装置10及び制動力制御装置20それぞれに出力し、ドライバ要求駆動力及びドライバ要求制動力を補正している。これにより、自車両が前方車両にある程度近づいた場合、反発力に応じて自車両に鈍い加速を与え或いは自車両を減速させ、運転者に接触可能性の報知を行っている。
【0092】
また、前記モデルを自車両が前方車両に近づくにつれて前記反発力が大きくなるようにすることで、自車両が前方車両に近づくにつれて走行抵抗が大きくなるので、自車両が前方車両へ接触する可能性の高まりに応じて走行抵抗を連続的に変化させて運転者に接触可能性を報知することができる。これにより、運転者は、走行抵抗の大きさに応じて前方車両への接触可能性の高さを推測できるようになる。
【0093】
そして、前述したように、自車両に朝日或いは西日があたる場合、又は自車両が夜間走行している場合には、警報音の出力タイミングが通常時よりも早くしている。運転者の視線に太陽光が入る可能性が高い場合、すなわち朝日又は西日があたる場合には、運転者は視界不良のために前方車両の挙動を正確に把握できなくなる場合がある。また、夜間走行している場合、外灯がないことや対向車のライトで、運転者は視界不良のために前方車両の挙動を正確に把握できなくなる場合がある。さらに、夜間では、疲労により運転者の判断力が低下する。よって、自車両に朝日或いは西日があたる場合、又は自車両が夜間走行している場合、警報音の出力タイミングを通常時よりも早くすることで、前方車両に接近していることを早い時期に運転者に認識させることができる。一方、このような場合でも、制動力による接触可能性の報知タイミングの変更はしておらず、これにより、接触可能性の報知のための制動力の介入タイミングが通常時のままで維持され、最適タイミングで制動力による接触可能性の報知を作動させることができる。これにより、運転者に煩わしさを感じさせてしまうことを防止できる。
【0094】
また、自車両が走行している道路が低μ路の場合、雨或いは霧のなかを走行している場合、又は自車両が走行している道路が降坂路の場合には、制動力による接触可能性の報知タイミングを通常時よりも早くするとともに、警報音の出力タイミングを通常時よりも早くしている。
ここで、路面が滑りやすい道路(低μ路)では、前方車両が減速する可能性があり、また、自車両の停止距離も長くなることも予想される。このような場合には、前方車両との車間距離に余裕を持たせて、運転者に安心感を与える必要がある。よって、自車両が低μ路を走行している場合、警報音の出力タイミングを通常時よりも早くすることで、前方車両に接近していることを早い時期に運転者に認識させることができる。また、制動力による接触可能性の報知タイミングを通常時よりも早くすることで、制動力による接触可能性の報知を最適タイミングで作動させることができ、運転者に安心感を与えることができる。
【0095】
また、雨又は霧のなかを走行している場合、運転者は視界不良のための前方車両の挙動を正確に把握できなくなる場合がある。また、走行路面が濡れているので、滑りやすくなっている。よって、自車両が雨又は霧のなかを走行している場合、警報音の出力タイミングを通常時よりも早くすることで、前方車両に接近していることを早い時期に運転者に認識させることができる。また、制動力による接触可能性の報知タイミングを通常時よりも早くすることで、制動力による接触可能性の報知を最適タイミングで作動させることができ、運転者に安心感を与えることができる。
【0096】
また、降坂路の場合、車両は速度がでやすくなる。よって、警報音の出力タイミングを通常時よりも早くし、また、制動力による接触可能性の報知タイミングを通常時よりも早くすることで、運転者に安心感を与えることができる。
このように、自車両が走行している道路が低μ路の場合、雨或いは霧のなかを走行している場合、又は自車両が走行している道路が降坂路の場合等といった、接触可能性の報知のための制動力が作動すれば有効に作用するような場合に、制動力による接触可能性の報知タイミングも通常時よりも早くすることで、接触可能性の報知の効果を高めることができる。
【0097】
また、自車両が走行している道路が登坂路の場合には、制動力による接触可能性の報知タイミングを通常時よりも遅くするとともに、警報音の出力タイミングを通常時よりも遅くしている。登坂路の場合には、運転者の操作で車両は容易に減速できる。よって、このような場合に、制動力による接触可能性の報知タイミングを通常時よりも遅くするとともに、警報音の出力タイミングを通常時よりも遅くすることで、最適タイミングで制動力による接触可能性の報知や警告音の出力をすることができる。これにより、運転者に運転者に煩わしさを感じさてしますことを防止できる。
【0098】
以上、本発明の実施の形態について説明した。しかし、本発明は、前述の実施の形態として実現されることに限定されるものではない。
すなわち、前述の実施の形態では、制動力による接触可能性の報知タイミングと警告音の出力タイミングとは、通常時に同じであるとして説明しているが、これに限定されるものではない。すなわち、制動力による接触可能性の報知タイミングに対して、警告音の出力タイミングが早くても、遅くてもよい。例えば、通常時において、制動力による接触可能性の報知タイミングに対して警告音の出力タイミングを早くている場合において、自車両に朝日又は西日があたる場合や自車両が夜間走行している場合には、警告音は、制動力による接触可能性の報知タイミングに対して、さらに早いタイミングで出力されるようになる。
【0099】
また、前述の実施の形態では、しきい値設定を、走行状態に基づいて予め用意している値を設定(代入設定)することで行っているが、これに限定されるものでもない。例えば、走行状態に応じて、通常時のしきい値に加算したり、通常時のしきい値から減算したりしてもよい。また、この場合には、通常時のしきい値に加算する加算値や通常時のしきい値から減算する減算値を、走行状態毎に異なるようにしてもよい。これにより、全ての走行状態を加味したしきい値(総合評価からなるしきい値)を設定することができるようになる。
【0100】
また、前述の実施の形態では、警報ブザー8からの警報音を出力しているが、これに限定されるものではなく、他の出力手段を用いてもよい。例えば、報知表示手段としての表示装置を備えて、前述した警報音と同様に、独自の出力タイミングで警報画像を出力してもよい。また、警報ブザー8と表示装置とを備えてもよく、この場合、警報音の出力と警報表示とを同時に行ったりする。
【0101】
また、前述の実施の形態では、補正量Fcの算出を、自車両の前方に仮想的な弾性体を設けて行う場合について説明したが、これに限定されるものではなく、車間距離を関数にして増加するような量を他の手法を用いて算出するようにしてもよい。
なお、前述の実施の形態の説明において、コントローラ5による前記図8に示すステップS1、ステップS3〜ステップS7の処理、前記レーダ装置30及び障害物検出処理装置2は、自車両が前方に存在する物体に接触する可能性を検出する接触可能性検出手段を実現しており、コントローラ5による前記図8に示すステップS9及びステップS10の処理は、前記接触可能性検出手段が検出した接触可能性に基づいて、駆動トルク又は制動トルクの少なくとも一方を変化させて接触可能性の報知を行う第1の接触可能性報知手段を実現しており、前記図8に示すステップS11及び警報ブザー8は、前記接触可能性検出手段が検出した接触可能性に基づいて、前記第1の接触可能性報知手段とは異なる出力手段により接触可能性の報知を行う第2の接触可能性報知手段を実現しており、前記図8に示すステップS2の処理及びカメラ7は、走行環境を検出する走行環境検出手段を実現しており、前記図11及び図12に示す処理(前記図8に示すステップS8)は、前記走行環境検出手段が検出した走行環境に基づいて、前記第1及び第2の接触可能性報知手段それぞれの報知タイミングを設定するタイミング設定手段を実現している。
【図面の簡単な説明】
【図1】本発明の実施の形態の走行制御システムの構成を示す図である。
【図2】前記走行制御システムの駆動力制御装置の構成を示すブロック図である。
【図3】アクセルペダル踏み込み量とドライバ要求駆動力との関係を定めた特性マップを示す特性図である。
【図4】前記走行制御システムの制動力制御装置の構成を示すブロック図である。
【図5】ブレーキペダル踏み込み力とドライバ要求制動力との関係を定めた特性マップを示す特性図である。
【図6】前記走行制御システムのレーダ装置の構成を示す図である。
【図7】前記レーダ装置によるスキャニングにより得られる障害物の検出結果を示す図である。
【図8】前記走行制御システムのコントローラの処理手順を示すフローチャートである。
【図9】走行制御システムが行う自車両の予測進路の説明に使用した図である。
【図10】前記予測進路に自車両の幅を考慮した予測走路の説明に使用した図である。
【図11】前記コントローラの処理中のしきい値設定処理の前半の処理手順を示すフローチャートである。
【図12】前記コントローラの処理中のしきい値設定処理の後半の処理手順を示すフローチャートである。
【図13】自車両の前方に仮想的な弾性体を設けた補正量算出のためのモデルの説明に使用した図である。
【図14】車間時間と衝突時間とに対応して仮想的な弾性体を設けたモデルの説明に使用した図である。
【図15】前記コントローラの処理中の補正量算出処理の処理手順を示すフローチャートである。
【図16】前記コントローラの処理中の補正量出力処理の処理手順を示すフローチャートである。
【図17】前記コントローラの処理中の警報音出力処理の処理手順を示すフローチャートである。
【図18】反発力、指示トルク、及び実制駆力の関係を示す図である。
【図19】補正量Fcに基づいて補正した駆動力及び制動力の特性の説明に使用した図である。
【図20】自車両に朝日又は西日があたる場合のしきい値の設定の説明に使用した図である。
【図21】自車両が夜間走行している場合のしきい値の設定の説明に使用した図である。
【図22】自車両が走行している道路が低μ路の場合のしきい値の設定の説明に使用した図である。
【図23】雨或いは霧のなかを走行している場合のしきい値の設定の説明に使用した図である。
【図24】自車両が走行している道路が降坂路の場合のしきい値の設定の説明に使用した図である。
【図25】自車両が走行している道路が登坂路の場合のしきい値の設定の説明に使用した図である。
【符号の説明】
1 車速センサ
2 障害物検出処理装置
3 ブレーキペダル
4 アクセルペダル
5 コントローラ
6 エンジン
7 カメラ
8 警報ブザー
10 駆動力制御装置
11 ドライバ要求駆動力算出部
12 加算器
13 エンジンコントローラ
20 制動力制御装置
21 ドライバ要求制動力算出部
22 加算器
23 ブレーキ液圧コントローラ
30 レーダ装置
31 発光部
32 受光部
200 前方障害物
300 自車両
400 前方車両(前方に存在する物体又は先行車両)
500,501,502 仮想弾性体
【発明の属する技術分野】
本発明は、自車両と自車両の前方物体との接触可能性に応じて減速制御を行い接触可能性を報知する車両用報知装置に関する。
【0002】
【従来の技術】
自車両が自車両の前方物体(例えば前方車両)に接触するのを防ぐ目的で運転者に接触可能性の報知を行う技術がある(例えば特許文献1参照)。このような接触可能性を報知する技術では、レーザレーダや電波式レーダ等によって前方物体を検出し、その検出した前方物体との接触可能性に基づいて警報音出力や減速制御等により接触可能性の報知を行っている。このように警報音出力や減速制御等の警報動作を行うことで、自車両が前方物体に接触してしまうことを軽減又は防止をしている。
【0003】
【特許文献1】
特開平9−286313号公報
【0004】
【発明が解決しようとする課題】
従来技術では、走行環境にかかわらず一定の減速制御を行っている。例えば、前記特許文献1に記載の技術では、車速にかかわりなく運転者が同等の減速ショックを感じることができるように、車速が大きくなるほど車両の減速度を大きくしている。このように、車速に応じて減速度を変化させるようにはしているが、走行環境に基づいて減速制御を変化させるようにはなっていない。この結果、接触可能性の報知のための減速制御が却って運転性を悪くし、これが運転者に煩わしさを感じさせてしまう場合がある。
【0005】
本発明は、前述の実情に鑑みてなされたものであり、運転者に煩わしさを感じさせることなく接触可能性を報知することができる車両用報知装置の提供を目的とする。
【0006】
【課題を解決するための手段】
前述の問題を解決するために、本発明に係る車両用報知装置は、自車両が前方に存在する物体に接触する可能性を接触可能性検出手段により検出し、前記接触可能性検出手段が検出した接触可能性に基づいて、駆動トルク又は制動トルクの少なくとも一方を変化させて接触可能性の報知を第1の接触可能性報知手段により行い、前記接触可能性検出手段が検出した接触可能性に基づいて、前記第1の接触可能性報知手段とは異なる出力手段により接触可能性の報知を第2の接触可能性報知手段を行い、走行環境検出手段により走行環境を検出し、前記走行環境検出手段が検出した走行環境に基づいて、前記第1及び第2の接触可能性報知手段それぞれの報知タイミングをタイミング設定手段により設定する。
【0007】
【発明の効果】
本発明によれば、第1の接触可能性報知手段による接触可能性の報知タイミングと、第2の接触可能性報知手段による接触可能性の報知タイミングとを、走行環境に基づいて設定することで、第1及び第2の接触可能性報知手段の報知の仕方に応じた最適タイミングで、接触可能性の報知をすることができる。これにより、運転者に煩わしさを感じさせてしまうことを防止できる。
【0008】
【発明の実施の形態】
以下、本発明の実施の形態を図面を参照しながら詳細に説明する。
図1は、本発明に係る車両用報知装置が組み込まれている走行制御システムの構成を示す。
この走行制御システムは、レーダ装置30、車速センサ1、障害物検出処理装置2、ブレーキペダル3、アクセルペダル4、カメラ装置7、警報ブザー8、制動力制御装置20、駆動力制御装置10、コントローラ5及びエンジン6を備えている。なお、特に示すまでもなく、車両は他の構成、例えば操舵角センサ等も有している。
【0009】
駆動力制御装置10は、アクセル操作手段であるアクセルペダル4の操作状態に応じた駆動力を発生するようにエンジン6を制御するとともに、外部からの指令に応じて、発生させる駆動力を変化させるように構成されている。
図2は、その駆動力制御装置10の構成をブロック図として示す。この駆動力制御装置10は、ドライバ要求駆動力算出部11、加算器12及びエンジンコントローラ13を備えている。
【0010】
ドライバ要求駆動力算出部11は、アクセルの操作量であるアクセルペダル4の踏み込み量(以下、アクセルペダル踏み込み量という。)に応じ運転者が要求する駆動力(以下、ドライバ要求駆動力という。)を算出する。例えば、ドライバ要求駆動力算出部11は、図3に示すようなアクセルペダル踏み込み量とドライバ要求駆動力との関係を定めた特性マップ(以下、ドライバ要求駆動力算出用マップという。)を用いて、アクセルペダル踏み込み量に対応するドライバ要求駆動力を得ている。そして、ドライバ要求駆動力算出部11は、求めたドライバ要求駆動力を加算器12を介してエンジンコントローラ13に出力する。なお、ドライバ要求駆動力算出用マップはドライバ要求駆動力算出部11が保持している。
【0011】
エンジンコントローラ13は、ドライバ要求駆動力を目標駆動力としてエンジン6への制御指令値を算出する。エンジン6はこの制御指令値に基づいて駆動される。また、駆動力制御装置10には、加算器12に駆動力補正量が入力されており、その駆動力補正量の入力がある場合には、エンジンコントローラ13には、加算器12でこの駆動力補正量が加算された補正後のドライバ要求駆動力からなる目標駆動力が入力される。
【0012】
このように、駆動力制御装置10は、ドライバ要求駆動力算出部11によりアクセルペダル踏み込み量に応じてドライバ要求駆動力を算出し、その一方で、駆動力補正量が別途入力された場合にはこの駆動力補正量を加算器12で加えた目標駆動力を得て、エンジンコントローラ13でその目標駆動力に応じた制御指令値を算出する。
【0013】
制動力制御装置20は、ブレーキ操作手段であるブレーキペダル3の操作状態に応じた制動力を発生するようにブレーキ液圧を制御するとともに、外部からの指令に応じて、発生させる制動力を変化させるように構成されている。
図4は、その制動力制御装置20の構成をブロック図として示す。この制動力制御装置20は、ドライバ要求制動力算出部21、加算器22及びブレーキ液圧コントローラ23を備えている。
【0014】
ドライバ要求制動力算出部21は、ブレーキの操作量であるブレーキペダル3の踏み込み力(以下、ブレーキペダル踏み込み力という。)に応じ運転者が要求する駆動力(以下、ドライバ要求制動力という。)を算出する。例えば、ドライバ要求制動力算出部21は、図5に示すように、ブレーキペダル踏み込み力とドライバ要求制動力との関係を定めた特性マップ(以下、ドライバ要求制動力算出用マップという。)を用いて、ブレーキペダル踏み込み力に対応するドライバ要求制動力を得ている。そして、ドライバ要求制動力算出部21は、求めたドライバ要求制動力を加算器22を介してブレーキ液圧コントローラ23に出力する。なお、ドライバ要求制動力算出用マップはドライバ要求制動力算出部21が保持している。
【0015】
ブレーキ液圧コントローラ23は、ドライバ要求制動力を目標制動力としてブレーキ液圧指令値を算出する。また、制動力制御装置20には、加算器22に制動力補正量が入力されており、その制動力補正量の入力がある場合には、ブレーキ液圧コントローラ23には、加算器22でこの制動力補正量が加算された補正後のドライバ要求制動力からなる目標制動力が入力される。
【0016】
このように、制動力制御装置20は、ドライバ要求制動力算出部21によりブレーキペダル踏み込み力に応じてドライバ要求制動力を算出し、その一方で、制動力補正量が別途入力された場合にはこの制動力補正量を加算器22で加えた目標駆動力を得て、ブレーキ液圧コントローラ23で目標制動力に応じたブレーキ液圧指令値を算出する。
【0017】
レーダ装置30は、図1に示すように、車両前部に搭載されており、前方物体までの距離を算出するように構成されている。
図6はレーダ装置30の構成を示す。レーダ装置30は、赤外線レーザ光を出射する発光部31と、その反射光を受光し、その受光に応じた電圧を出力する受光部32とを備え、発光部31と受光部32とが隣接して配置された構成になっている。ここで、発光部31は、図6中に矢印Aとして示す方向に振れるように構成され、スキャニング機構が組み合わされたものになっている。そして、発光部31は、角度を変化させながら所定角度範囲内で順次発光するようになっている。このレーダ装置30は、当該発光部31のレーザ光の出射から受光部32における受光までの時間差に基づいて自車両から前方障害物200までの距離を計測する。
【0018】
このようなレーダ装置30は、発光部31をスキャニング機構によりスキャニングしながら、各スキャニング位置或いはスキャニング角度について、反射光を受光しているか否かの判定を行い、反射光を受光した場合に前方障害物200までの距離を算出する。さらに、レーダ装置30は、前方障害物200を検出したときのスキャニング角と前記前方障害物200までの距離とに基づき、自車両に対する当該前方障害物200の左右方向の位置も算出する。すなわち、レーダ装置30は、自車両に対する障害物200の相対的な位置をも特定するように構成されている。
【0019】
図7は、このレーダ装置30がスキャニングして得た障害物の検出結果の一例を示す。各スキャニング角で自車両に対しての障害物の相対的な位置を特定することで、図7に示すように、スキャニング範囲内で検出できる複数の物体についての平面的な存在状態図を得ることができる。
なお、レーダ装置30は、発光部31が赤外線を使った光式のものに限定されるものではなく、発光部31がマイクロ波やミリ波等を使った電波式のものであってもよく、また、ビデオ画像を処理することによって前方障害物200を検出するように構成されているものであってもよい。レーダ装置30は、以上のようにして検出した結果を障害物検出処理装置2に出力する。
【0020】
障害物検出処理装置2は、レーダ装置30の検出結果に基づいて前方障害物200の情報を得るように構成されている。具体的には、障害物検出処理装置2は、レーダ装置30からスキャニング周期毎(或いはスキャンニング角度毎)に出力される物体の存在状態同士を比較し、物体の動きを判別するとともに、検出した物体間の近接状態や動きの類似性等の情報に基づいてこれら物体が同一物体であるか異なる物体であるかを判別する。
【0021】
この処理により、障害物検出処理装置2は、自車両からその物体(前方障害物)までの前後方向距離X(m)、自車両に対する物体の左右方向距離Y(m)、その物体の幅W(m)、さらに、自車両の走行速度とその物体の移動速度(走行速度)との相対速度ΔV(m/s)を得ている。そして、障害物検出処理装置2は、複数の物体を特定した場合には、各物体についてそれらの情報を得ている。障害物検出処理装置2は、これら情報を所定の時間周期でコントローラ5に出力する。
【0022】
カメラ装置7は、車両がの走行環境を撮像するものであり、例えば車両前部に搭載される、例えばCCD(Charge Coupled Device)カメラである。カメラ装置7で撮像された撮像画像は、コントローラ5に出力される。
警報ブザー8は、警告音を出力する。走行制御システムでは、車両に制動力を作用させて接触可能性の報知をするように構成されているが、この制動力による接触可能性の報知とともに、接触可能性がある場合にはこの警報ブザー8から警告音を出力する。警報ブザー8は、コントローラ5からの制御信号により制御されている。
【0023】
コントローラ5は、車両について各種制御を行うように構成されている。本実施の形態では、コントローラ5の機能を特に本発明に係るものに限定して説明する。すなわち、コントローラ5は、車速センサ1からの車速情報、前記障害物検出処理装置2の検出結果、及びアクセルペダル4の操作状態情報等といった各種情報が入力されており、これらの情報に基づいて指令信号を演算し、求めた指令信号を前記駆動力制御装置10及び制動力制御装置20にそれぞれに出力する。
【0024】
ここで、図8を用いて、コントローラ5の処理手順を説明する。コントローラ5は、この図8に示す処理をタイマ割り込みによって一定時間毎に呼び出すサブルーチンとして実行している。
先ずステップS1において、コントローラ5は、車速センサ1及び図示しない舵角センサから車速データ及び舵角データを取込む。ここで、車速センサ1及び舵角センサは、それぞれ回転に応じた所定間隔のパルスを出力するエンコーダであり、コントローラ5は、これらセンサからのパルス数をカウントし、これを積算することで操舵角δ(rad)及び自車速Vh(m/s)を算出する。コントローラ5は、この結果を図示しないメモリに格納する。
【0025】
続いてステップS2において、コントローラ5は走行環境情報を取り込む。
具体的には、走行環境情報として、自車両が走行している環境について、「朝日又は西日があたっている」、「夜」、「低μ路」、「雨」、「霧」、「降坂路」及び「登坂路」などの情報を取り込む。
ここで、走行環境としての「朝日又は西日があたっている」や「夜」の検出は、例えば、カメラ装置7による撮像データに基づいて行い、例えば撮像画像の輝度等を参照して行う。また、走行環境としての「低μ路」の検出は、例えば、TCS(トラクションコントロールシステム)の作動状態に基づいて行い、すなわち、TCSが作動している場合には、「低μ路」と判断する。また、走行環境としての「降坂路」や「登坂路」の検出は、例えば、駆動力と実際の自車速との関係に基づいて行い、すなわち、駆動力に対して実際の自車速が大きい場合には「降坂路」と判断し、駆動力に対して実際の自車速が小さい場合には「登坂路」と判断する。また、走行環境としての「雨」の検出は、ワイパー操作スイッチの操作状態に基づいて行う。また、「霧」の検出については、フォグランプの点灯状態に基づいて行う。
【0026】
続いてステップS3において、コントローラ5は障害物情報を取り込む。すなわち、コントローラ5は、障害物検出処理装置2の検出結果である前後方向距離X(m)、左右方向距離Y(m)、物体幅W(m)及び相対速度ΔV(m/s)を取込む。コントローラ5は、例えば障害物検出処理装置2との間の情報交換をシリアル通信のような一般的な通信処理で行っている。そして、コントローラ5は、取り込んだこれら情報をメモリに格納する。
【0027】
続いてステップS4において、コントローラ5は、取り込んだ自車速Vh及び操舵角δに基づいて次のような自車進路予測を行う。
自車速Vh及び操舵角δに応じて車両の旋回曲率ρ(1/m)を与える式は一般に下記(1)式として知られている。
ρ={1/(1+A・Vh2)}・(δ/N) ・・・(1)
ここで、Lは自車両のホイールベースであり、Aは車両に応じて定められたスタビリティー・ファクタと呼ぶ正の定数であり、Nはステアリングギア比である。
【0028】
ここで、旋回半径Rは、旋回曲率ρを用いて下記(2)式として示すことができる。
R=1/ρ ・・・(2)
この旋回半径Rを用いることで、図9に示すように、自車両300から当該自車両300の方向と鉛直にRだけ離れた位置(図9では右方向に離れている位置)にある点を中心とした半径Rの円弧として、自車両の進路を予測できる。
【0029】
なお、以下の説明では、操舵角δは、右方向に操舵された場合に正値をとり、左方向に操舵された場合に負値をとるものとし、旋回曲率及び旋回半径については、操舵角δが正値をとる場合に右旋回、操舵角δが負値をとる場合に左旋回を意味するものとする。
さらに、このような予測進路を車幅或いは車線幅を考慮したものに変換する。すなわち、前述した予測進路はあくまでも自車の進行方向を予測した軌道にすぎないので、車幅或いは車線幅を考慮して自車両が走行するであろう領域を決定する必要がある。図10は、それらを考慮することで得た予測走路を示す。この図10に示す予測走路は、前述した予測進路に自車両300の幅Twを加えて得たものである。すなわち、前記予測進路と同一点を中心とし半径がR−Tw/2の円弧と半径がR+Tw/2の円弧とで囲まれる領域として、自車両の予測進路を得る。
【0030】
なお、操舵角δを用いる代わりにヨーレートγを用いて、自車両の予測進路を、そのヨーレートγと自車速Vhとの関係として下記(3)式により得てもよい。
R=Vh/γ ・・・(3)
或いは、横加速度Ygと自車速Vhとの関係として自車両の予測進路を下記(4)式により得てもよい。
【0031】
R=Vh2/Yg ・・・(4)
なお、以下の説明は、最初に説明した自車速Vhと操舵角δとの関係に基づいて予測進路を求めていた場合を前提にした説明とする。
ステップS4においてこのような自車両の進路予測を行った後、コントローラ5は、ステップS5において、取り込んだ物体(障害物)についての情報からそれらの物体が前記予測走路の走路上にあるか否かを判定する。そして、走路上に障害物がある場合には、その障害物を対象として、ステップS6以降の処理で接触の可能性判断処理を行う。このような処理により、自車両に対して非常に近い位置にある物体であっても、前述のように決定した自車両の予測走路から外れているものは、接触可能性のある対象として取り扱われないようになる。
【0032】
ステップS6では、コントローラ5は、接触の可能性を判断するために、下記(5)式により自車両と障害物との間の車間距離Xを自車速Vhで除した車間時間THWを算出し、また、下記(6)式により自車両と障害物との間の車間距離Xを相対速度Vr(ΔV)で除した衝突時間TTCを算出する。
THW=X/Vh ・・・(5)
TTC=X/Vr ・・・(6)
また、前記ステップS5において前記予測走路の走路上に複数の物体があるとされた場合には、各物体について、車間時間THW及び衝突距離TTCを得る。
【0033】
続いてステップS7において、コントローラ5は、車間距離THWが最小となる物体(障害物)、さらには衝突時間TTCが最小となる物体(障害物)をそれぞれ選択する。
続いてステップS8において、コントローラ5はしきい値設定処理を行う。図11及び図12は、このしきい値設定処理の処理手順を示す。
【0034】
先ず図11に示すステップS11において、コントローラ5は、朝日又は西日があたっているか否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「朝日又は西日があたっている」か否かを判定する。ここで、コントローラ5は、朝日又は西日があたっている場合、ステップS13に進み、朝日も西日もあたっていない場合、ステップS12に進む。
【0035】
ステップS12では、コントローラ5は、走行環境が夜か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「夜」か否かを判定する。ここで、コントローラ5は、走行環境が夜の場合、ステップS13に進み、走行環境が夜でない場合、図12に示すステップS14に進む。
ステップS13では、コントローラ5は、次のようなしきい値設定をする。 車間時間THWに基づいて警告音の出力タイミングを規定するしきい値(以下、車間時間基準の警告音用しきい値という。)THW_W_Thをしきい値ThTHWW_1に設定し(THW_W_TH=ThTHWW_1)、衝突時間TTCに基づいて警告音の出力タイミングを規定するしきい値(以下、衝突時間基準の警告音用しきい値という。)TTC_W_Thをしきい値ThTCCW_1に設定する(TTC_W_TH=ThTTCW_1)。
【0036】
ここで、しきい値ThTHWW_1は、後述の通常時の値ThTHWW_0よりも大きい値であり(ThTHWW_1>ThTHWW_0)、しきい値ThTTCW_1は、後述の通常時の値ThTTCW_0よりも大きい値である(ThTTCW_1>ThTTCW_0)。コントローラ5は、このようなしきい値設定をして、図12に示すステップS14に進む。
【0037】
なお、車間時間基準の警告音用しきい値THW_W_Thと車間時間THWとの関係及び衝突時間基準の警告音用しきい値TTC_W_Thと衝突時間TTCとの関係については後で詳述する。
図12に示すステップS14では、コントローラ5は、走行している道路が低μ路か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「低μ路」か否かを判定する。ここで、コントローラ5は、走行している道路が低μ路の場合、ステップS19に進み、走行している道路が低μ路でない場合、ステップS15に進む。
【0038】
ステップS19では、コントローラ5は、次のようなしきい値設定をする。 車間時間THWの比較に用いるしきい値(以下、車間時間用しきい値という。)
THW_Thをしきい値ThTHW_1に設定し(THW_Th=ThTHW_1)、衝突時間TTCの比較に用いるしきい値(以下、衝突時間用しきい値という。)TTC_Thをしきい値ThTTC_1に設定し(TTC_Th=ThTTC_1)、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_1に設定し(THW_W_TH=ThTHWW_1)、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_1に設定する(TTC_W_TH=ThTTCW_1)。
【0039】
ここで、しきい値ThTHW_1は、後述の通常時の値ThTHW_0よりも大きい値であり(ThTHW_1>ThTHW_0)、しきい値ThTTC_1は、後述の通常時の値ThTTC_0よりも大きい値である(ThTTC_1>ThTTC_0)。コントローラ5は、このようなしきい値設定をして、当該図11及び図12に示す処理を終了する。
【0040】
ステップS15では、コントローラ5は、走行環境が雨又は霧か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「雨又は霧」か否かを判定する。ここで、コントローラ5は、走行環境が雨又は霧の場合、前記ステップS19に進み、走行環境が雨でも、霧でもない場合、ステップS16に進む。
【0041】
ステップS16では、コントローラ5は、走行している道路が降坂路か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「降坂路」か否かを判定する。ここで、コントローラ5は、走行している道路が降坂路の場合、前記ステップS19に進み、走行している道路が降坂路でない場合、ステップS17に進む。
【0042】
ステップS17では、コントローラ5は、走行している道路が登坂路か否かを判定する。すなわち、前記図8に示すステップS2で取り込んだ走行環境情報が、「登坂路」か否かを判定する。ここで、コントローラ5は、走行している道路が登坂路の場合、ステップS20に進み、走行している道路が登坂路でない場合、ステップS18に進む。
【0043】
ステップS18では、コントローラ5はしきい値設定をする。このしきい値設定では次のように通常時の値の設定をする。
車間時間用しきい値THW_Thを通常時のしきい値ThTHW_0に設定し(THW_Th=ThTHW_0)、衝突時間用しきい値TTC_Thを通常時のしきい値ThTTC_0に設定し(TTC_Th=ThTTC_0)、車間時間基準の警告音用しきい値THW_W_Thを通常時のしきい値ThTHWW_0に設定し(THW_W_TH=ThTHWW_0)、衝突時間基準の警告音用しきい値TTC_W_Thを通常時のしきい値ThTCCW_0に設定する(TTC_W_TH=ThTTCW_0)。コントローラ5は、このようなしきい値設定をして、当該図11及び図12に示す処理を終了する。
【0044】
ステップS20では、コントローラ5は、次のようなしきい値設定をする。
車間時間用しきい値THW_Thをしきい値ThTHW_2に設定し(THW_Th=ThTHW_2)、衝突時間用しきい値TTC_Thをしきい値ThTTC_2に設定し(TTC_Th=ThTTC_2)、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_2に設定し(THW_W_TH=ThTHWW_2)、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_2に設定する(TTC_W_TH=ThTTCW_2)。
【0045】
ここで、しきい値ThTHW_2は、通常時の値ThTHW_0よりも小さい値であり(ThTHW_2<ThTHW_0)、しきい値ThTTC_2は、通常時の値ThTTC_0よりも小さい値であり(ThTTC_2<ThTTC_0)、しきい値ThTHWW_2は、通常時の値ThTHWW_0よりも小さい値であり(ThTHWW_2<ThTHWW_0)、しきい値ThTTCW_2は、通常時の値ThTTCW_0よりも小さい値である(ThTTCW_2<ThTTCW_0)。コントローラ5は、このようなしきい値設定をして、当該図11及び図12に示す処理を終了する。
【0046】
なお、前述の処理手順では、朝日又は西日があたっている場合や走行環境が夜の場合に対応するしきい値の設定(前記ステップS13)を行い、その後、走行している道路が低μ路の場合、雨或いは霧の場合、又は走行している道路が降坂路の場合に対応するしきい値の設定(前記ステップS19)、走行している道路が登坂路の場合に対応するしきい値の設定(前記ステップS20)、通常時に対応するしきい値の設定(前記ステップS18)を行っている。このような場合には、ステップS13でしきい値を設定した場合でも、その後、ステップS18、ステップS19及びステップS20の処理でしきい値を設定するので、実質的に、ステップS13のしきい値の設定が意味をなさなくなる。
【0047】
このようなことから、ステップS13でしきい値の設定をした場合には、最終的なしきい値の設定(前記ステップS18、ステップS19及びステップS20)は、そのステップS13の設定を考慮して行うようにする。例えば、ステップS13の設定を優先的に有効にしたり、又は、ステップS13で設定したしきい値と、ステップS18、ステップS19或いはステップS20で設定したしきい値とを考慮した新たなしきい値を最終的に設定する、といったようにである。なお、以下の説明では、ステップS13でしきい値を設定した場合、当該ステップS13のしきい値の設定を優先的に有効にするようにしている。
【0048】
以上のように、コントローラ5は、ステップS8におけるしきい値設定処理を行う。
続いて図8のステップS9において、コントローラ5は、車間時間THWが最小である物体の当該車間時間THWと前記ステップS8で設定した車間時間用しきい値THW_Thとを比較して補正量を算出し、また、衝突時間TTCが最小である物体の当該衝突時間TTCと前記ステップS8で設定した衝突時間用しきい値TTC_Thとを比較して補正量を算出する。
【0049】
補正量の算出処理では次のような仮定から補正量を算出している。
図13中(A)に示すように、自車両300と前方に存在する物体である前方車両(先行車両)400との間であり、自車両300の前方に、仮想的な弾性体(以下、仮想弾性体という。)500があるモデルを仮定している。そして、このモデルでは、自車両300と前方車両400との間隔がある距離以下になったときに、仮想弾性体500が前方車両400に当たり圧縮され、この圧縮力が仮想弾性体500の反発力として自車両300に擬似的な走行抵抗として作用するようにしている。
【0050】
このモデルにおける仮想弾性体500の長さL_THW(l)は、自車速Vh及び車間時間用しきい値THW_Thに関連付けて下記(7)式として与えている。
L_THW=THW_Th×Vh ・・・(7)
そして、この長さL_THW(l)の仮想弾性体500の弾性係数(前記車間時間用制御ゲイン)をk_THW(k)と仮定し、図13中(B)に示すように、自車両300に対して仮想弾性体500の長さL_THW(l)の範囲内に前方車両400が位置された場合に前後方向距離(弾性変位)Xに応じて変化するものとして、仮想弾性体500による第1の反発力F_THWを下記(8)式として与える。
【0051】
F_THW=k_THW×(L_THW−X) ・・・(8)
このモデルによれば、自車両300と前方車両400との間の距離が基準長さL_THW(l)より短い場合、弾性係数k_THWを有する仮想弾性体500により第1の反発力F_THWが発生することになる。ここで、弾性係数k_THWは、前述したように制御ゲインであり、制御によって適切な警報効果が得られるように調整される制御パラメータとなる。
【0052】
以上のような関係から、車間距離が長い、すなわち
X>L_THW
の場合、仮想弾性体500は圧縮されないため、第1の反発力F_THWは発生しない。すなわち、
F_THW=0
となる。一方、車間距離が短い場合、補正量として仮想弾性体500の第1の反発力F_THWは前後方向距離Xに応じて前記(8)式により算出できる。
【0053】
また、前述のモデルでは、仮想弾性体(以下、第1の仮想弾性体という。)500の長さL_THW(l)を自車速Vh及び車間時間用しきい値THW_Thに関連付けて得ているが、これと同様に、衝突時間用しきい値TTC_Thに関連付けて長さがL_TTCである仮想的な弾性体(以下、第2の仮想弾性体という。)のモデルも想定できる。図14には、前記第1の仮想弾性体501を含めてその第2の仮想弾性体502のモデルを示す。
【0054】
この第2の仮想弾性体502については、相対速度Vrに応じて衝突時間用しきい値TTC_Thに関連付けて記(9)式として第2の仮想弾性体の長さL_TTCを与える。
L_TTC=TTC_Th×Vr ・・・(9)
そして、この長さL_TTC(l)の第2の仮想弾性体502の弾性係数(前記衝突時間用制御ゲイン)をk_TTC(k)と仮定し、図13中(B)に示すように、自車両300に対して第2の仮想弾性体502の長さL_TTC(l)の範囲内に前方車両400が位置された場合に前後方向距離(弾性変位)Xに応じて変化するものとして、第2の仮想弾性体502による第2の反発力F_TTCを下記(10)式として与える。
【0055】
F_TTC=k_TTC×(L_TTC−X) ・・・(10)
このモデルによれば、自車両300と前方車両400との間の距離が基準長さL_TTC(l)より短い場合、弾性係数k_TTCを有する第2の仮想弾性体502により第2の反発力F_TTCが発生することになる。ここで、弾性係数k_THWは、前述したように制御ゲインであり、制御によって適切な警報効果が得られるように調整される制御パラメータである。
【0056】
以上のような関係から、相対速度が小さく、車間距離が長い場合、すなわち、
X>L_TTC
の場合、第2の仮想弾性体502は圧縮されないため、第2の反発力F_TTCは発生しない。すなわち、
F_TTC=0
となる。一方、相対速度が大きく、車間距離が短い場合、
L_TTC>X
となり、補正量として第2の仮想弾性体502の第2の反発力F_TTCは、前後方向距離Xに応じて前記(10)式により算出できる。
【0057】
以上のようにモデルを仮定し、長さL_THWの第1の仮想弾性体501により第1の反発力F_THWを算出し、長さL_TTCの第2の仮想弾性体502により第2の反発力F_TTCを算出している。
そして、以上のように算出した第1及び第2の反発力F_THW,F_TTCのうち、大きい方の値を最終的な補正値Fcとして決定する。
【0058】
図15は、以上のような補量算出処理の処理手順を示す。なお、この処理手順では、基本的には前述の考え方と同様であるが、車間時間THWと車間時間用しきい値THW_Thとの関係、或いは衝突時間TTCと衝突時間用しきい値TTC_Thとの関係に基づいて、最終的な補正値Fcを得るような処理になっている。
【0059】
すなわち、先ずステップS31において、コントローラ5は、車間時間THWが車間時間用しきい値THW_Th未満であるか否かを判定し、車間時間THWが車間時間用しきい値THW_Th未満の場合、ステップS32に進み、車間時間THWが車間時間用しきい値THW_Th以上の場合、ステップS33に進む。
【0060】
ステップS32では、コントローラ5は、前記(8)式から前後方向距離Xに応じた第1の反発力F_THWを算出し、ステップS34に進む。一方、ステップS33では、コントローラ5は、第1の反発力F_THWを0として、ステップS34に進む。
ステップS34では、コントローラ5は、衝突時間TTCが衝突時間用しきい値TTC_Th未満であるか否かを判定し、衝突時間TTCが車間時間用しきい値TTC_Th未満の場合、ステップS35に進み、衝突時間THWが車間時間用しきい値THW_Th以上の場合、ステップS36に進む。
【0061】
ステップS35では、コントローラ5は、前記(10)式から前後方向距離Xに応じた第2の反発力F_TTCを算出し、ステップS37に進む。一方、ステップS36では、コントローラ5は、第2の反発力F_TTCを0として、ステップS37に進む。
ステップS37では、コントローラ5は、以上のように算出した第1及び第2の反発力F_THW,F_TTCのうち、大きい方の値を最終的な補正値Fcとして決定する。
【0062】
以上のように、ステップS9において、コントローラ5は補正量Fcを算出する。
そして、コントローラ5は、ステップS10において、このようにして得た補正量Fcを駆動力制御装置10や制動力制御装置20に出力する。
図16は、その補正量出力処理の処理手順を示す。
【0063】
先ずステップS41において、コントローラ5は、予め読み込んでいるアクセルペダル踏み込み量の情報に基づいてストローク変位量を得る。
続いてステップS42において、コントローラ5は、このストローク変位量に基づいて運転者が要求する駆動力であるドライバ要求駆動力Fdを推定する。具体的には、コントローラ5は、駆動力制御装置10がドライバ要求駆動力算出用に使用しているドライバ要求駆動力算出用マップ(図3)と同一のマップを使用して、アクセルペダル踏み込み量に応じたドライバ要求駆動力Fdを推定する。
【0064】
続いてステップS43において、コントローラ5は、推定したドライバ要求駆動力Fdと前記補正量Fcとを比較して、その大小関係を得る。すなわち、コントローラ5は、ドライバ要求駆動力Fdが補正量Fc以上であるか否かを判定し、ドライバ要求駆動力Fdが補正量Fc以上である場合(Fd≧Fc)、ステップS44に進み、ドライバ要求駆動力Fdが補正量Fc未満である場合(Fd<Fc)、ステップS46に進む。
【0065】
コントローラ5は、ステップS44において、駆動力補正量として前記補正量Fcを駆動力制御装置10に出力し、さらに、ステップS45において、制動力補正量として0を制動力制御装置20に出力する。
一方、コントローラ5は、ステップS46において、駆動力補正量としてドライバ要求駆動力Fdの負値(−Fd)を駆動力制御装置10に出力し、さらに、ステップS47において、前記補正量Fcからドライバ要求駆動力Fdを引いた値(Fc−Fd)を制動力補正量として制動力制御装置20に出力する。
【0066】
このようなコントローラ5の補正量出力処理により、駆動力制御装置10では、コントローラ5からの駆動力補正量をドライバ要求駆動力に加算した値として目標駆動力を得て、制動力制御装置20では、コントローラ5からの制動力補正量をドライバ要求制動力に加算した値として目標制動力を得る。
なお、このように目標駆動力や目標制動力を補正量Fcを用いて得ており、前述したように、その補正量Fcは第1及び第2の反発力F_THW,F_TTCにより決定されている。そして、第1及び第2の反発力F_THW,F_TTCは、前記(8)式や(10)式に示したように、弾性係数k_THW,k_TTCの乗算値として得ている。このようなことから、弾性係数k_THW,k_TTCは目標駆動力や目標制動力、或いは補正量Fcの制御ゲインとなる。
【0067】
続いてステップS11において、コントローラ5は警報音出力処理を行う。図17は、この警報音出力処理の処理手順を示す。
先ずステップ51において、コントローラ5は、車間時間THWが車間時間基準の警告音用しきい値THW_W_Th未満か否か、及び衝突時間TTCが衝突時間基準の警告音用しきい値TTC_W_Th未満か否かを判定し、車間時間THWが車間時間基準の警告音用しきい値THW_W_Th未満、又は衝突時間TTCが衝突時間基準の警告音用しきい値TTC_W_Th未満の場合、ステップS52に進み、それ以外の場合、当該図17に示す処理を終了する。
【0068】
ステップS52では、コントローラ5は、警報ブザー8に制御信号を出力して、警報ブザー8を作動させる。そして、コントローラ5は、当該図17に示す処理を終了する。
以上のようにコントローラ5は種々の処理を行っている。
以上のような構成により、走行制御システムは、駆動力制御装置10によりアクセルペダル4の操作状態に応じた駆動力を発生するようにエンジン6を制御するとともに、制動力制御装置20によりブレーキペダル3の操作状態に応じた制動力を発生するようにブレーキを制御している。
【0069】
その一方で、走行制御システムでは、接触可能性のある障害物の有無に応じてそのような各操作状態に応じた制御量を補正している。すなわち、走行制御システムでは、レーダ装置30の検出状態に応じて障害物検出処理装置2により得た自車両の前方の障害物の情報、車速センサ1からの自車速情報、及び操舵角センサからの操舵角情報等に基づいて、接触可能性のある障害物を特定するとともに、図20又は図21に示した制御量補正用のモデルを用いて前記特定した障害物との関係から補正量Fcを求め、その補正量Fcを利用して運転者の操作状態に応じた駆動力補正量及び制動力補正量をそれぞれ得て、これら駆動力補正量及び制動力補正量で補正した目標駆動力及び目標制動力によってエンジン6やブレーキ装置を制御している。さらに、走行制御システムでは、接触可能性がある場合、警報ブザー8により警報音を出力する。
【0070】
次に動作例を説明する。
走行制御システムは、自車進路予測を行い(前記ステップS4)、予測走路の走路上に障害物がある場合には、接触の可能性判断のための障害物を特定する(前記ステップS5〜ステップS7)。具体的には、予測走路の走路上にある障害物について車間時間THWと衝突時間TTCとを算出し、ここで複数の障害物がある場合には、各障害物について車間時間THWと衝突時間TTCとを算出し(前記ステップS5及びステップS6)、その車間時間THWと衝突時間TTCとから、車間距離THWが最小となる障害物、さらには衝突時間TTCが最小となる障害物を特定する(前記ステップS7)。
【0071】
そして、走行制御システムは、そのようにして求めた車間時間THWが最小である物体の当該車間時間THWと車間時間用しきい値THW_Thとを用いて補正量となる第1の反発力F_THWを求め、さらに衝突時間TTCが最小である物体の当該衝突時間TTCと衝突時間用しきい値TTC_Thとを用いて補正量となる第2の反発力F_TTCを求める(前記ステップS10)。
【0072】
具体的には、車間時間THWが車間時間用しきい値THW_Th未満の場合、すなわち車間時間が長い場合(車間距離が距離L_THWに達していない場合)、第1の反発力F_THWを0とする(前記ステップS33)。一方、車間時間THWが車間時間用しきい値THW_Th以上の場合、すなわち車間時間が短い場合(車間距離が距離L_THWに達している場合)、前記(8)式により、前記車間時間用しきい値THW_Th及び車間時間用制御ゲインk_THWを用いて、その時の車間距離に応じた値として第1の反発力F_THWを算出する(前記ステップS32)。
【0073】
また、衝突時間TTCが衝突時間用しきい値TTC_Th未満の場合、すなわち衝突時間が長い場合(車間距離が距離L_TTCに達していない場合)、第2の反発力F_TTCを0とする(前記ステップS36)。一方、衝突時間TTCが衝突時間用しきい値TTC_Th以上の場合、すなわち衝突時間が短い場合(車間距離が距離L_TTCに達している場合)、前記(10)式により、前記衝突時間用しきい値TTC_Th及び衝突時間用制御ゲインk_TTCを用いて、その時の車間距離に応じた値として第2の反発力F_TTCを算出する(前記ステップS35)。なお、車間時間用しきい値THW_Th及び衝突時間用しきい値TTC_Thについては、車間時間基準の警告音用しきい値THW_W_Thや衝突時間基準の警告音用しきい値TTC_W_Thのしきい値とともに、走行環境に基づいて設定するようにしているが、これらしきい値の設定値ごとの動作については後で詳述する。
【0074】
そして、走行制御システムは、第1及び第2の反発力F_THW,F_TTCのうち、大きい方の値を最終的な補正値Fcとして決定する(前記ステップS37)。走行制御システムは、このようにして得た補正量Fcに基づいて目標駆動力を決定し、エンジン6を駆動している(前記ステップS10)。
すなわち、走行制御システムは、アクセルペダル4が踏み込まれている場合において、アクセルペダル4の踏み込み量に対応するドライバ要求駆動力Fdが補正量Fc以上である場合、駆動力補正量として補正量Fcの負値−Fcを駆動力制御装置10に出力するとともに、制動力補正量として0を制動力制御装置20に出力する(前記ステップS44及びステップS45)。
【0075】
これにより、駆動力制御装置10側ではドライバ要求駆動力に前記負値−Fc分が加算された目標駆動力が得られ、この目標駆動力になるようにエンジン6が駆動される。この結果、運転者が要求した駆動力に対して実際の駆動力がFc分だけ小さくなり、これにより、運転者によるアクセルペダルの踏み込みに対して車両は鈍い加速挙動を示すようになる。よって、アクセルペダル4を踏んでいるにもかかわらず期待したほどの加速感が得られない状態になるので、このような鈍い加速挙動を接触可能性の報知として、運転者は、自車両が先行車両に接近していることを知ることになる。
【0076】
一方、走行制御システムは、アクセルペダル4の踏み込み量に対応するドライバ要求駆動力Fdの推定値が補正量Fc未満である場合、駆動力補正量として推定したドライバ要求駆動力Fdの負値−Fdを駆動力制御装置10に出力するとともに、補正量Fcから推定したドライバ要求駆動力Fdを引いた差分値(Fc−Fd)を制動力補正量として制動力制御装置20に出力する(前記ステップS46及びステップS47)。
【0077】
これにより、駆動力制御装置10側ではドライバ要求駆動力に前記負値−Fd分が加算された目標駆動力が得られ、この目標駆動力になるようにエンジン6が駆動され、その一方で、制動力制御装置20側ではドライバ要求制動力に前記差分値(Fc−Fd)が加算された目標制動力が得られ、この目標制動力になるようにブレーキの制御がなされる。これにより、運転者が要求した駆動力に対して実際の駆動力が略0になり、さらに、運転者が要求している制動力に対して実際の制動力が前記差分値(Fc−Fd)分だけ大きくなる。すなわち、ドライバ要求駆動力Fdが補正量Fc未満である場合(Fd<Fc)、駆動力制御装置10の制御のみでは目標とする反発力(補正量Fc)を得ることができないので、駆動力制御装置10にドライバ要求駆動力Fdの負値−Fdを駆動力補正量を出力する一方で、制動力補正装置20にその不足分として差分値(Fc−Fd)を出力して、反発力(補正量Fc)を得るようにしている。つまり、駆動力制御装置10と制動力補正装置20とにおけるそれぞれの過不足分を調整して、駆動力制御装置10と制動力補正装置20とを協働させて、システム全体として所望の反発力(Fc)を得るようにして、その反発力を走行抵抗として車両に作用させている。よって、アクセルペダル踏み込み量が所定量(Fc)に達していない場合には、運転者が要求している制動力に対しその不足分(Fc−Fd)だけ制動力が大きくなり、車両はその制動力により減速挙動を示すようになる。このような減速挙動を接触可能性の報知として、運転者は、自車両が先行車両に接近していることを知ることになる。
【0078】
なお、前述したように、アクセルペダル踏み込み量に対応するドライバ要求駆動力Fdが補正量Fc以上である場合(Fd≧Fc)、Fd−Fc≧0であるので、補正量Fcを駆動力補正量としてドライバ要求駆動力Fdを補正(減算)してもドライバ要求駆動力の差分が正値として残る。このようなことから、アクセルペダル踏み込み量に対応するドライバ要求駆動力Fdが補正量Fc以上である場合には、制動力補正量を0にして、制動力制御装置20の補正に頼らずに、補正量Fcの負値を駆動力補正量として与えて駆動力制御装置10のみで補正を行い、システム全体として所望の反発力を発生させて、その反発力を走行抵抗として車両に作用させているといえる。
【0079】
また、前述したように、減速制御の大きさを示すものとなる補正量Fcについては、車間時間に基づいて得た第1の反発力F_THWと衝突時間に基づいて得た第2の反発力F_TTCのうち、大きい方の値を採用している。このようにすることで、車間時間(すなわち車間距離)に起因して自車両が前方車両に接触可能性ある場合には、第1の反発力F_THWが大きくなり、この第1の反発力F_THWを補正量Fcとした接触可能性の報知のための減速制御が働くようになる。一方、衝突時間(すなわち相対速度)に起因して自車両が前方車両に接触可能性ある場合には、第2の反発力F_TTCが大きくなり、この第2の反発力F_TTCを補正量Fcとした接触可能性の報知のための減速制御が働くようになる。これにより、車間時間や衝突時間のいずれかに起因して、自車両が前方車両に接触する可能性がある場合に、接触可能性の報知が作動するようになり、さらには、その作動原因となった車間時間又は衝突時間に応じた反発力が作用するようになる。これにより、車間時間及び衝突時間の両方を基準に、自車両が前方車両に接触する可能性をみて、接触可能性の報知をすることができる。
【0080】
なお、前述したような補正量(反発力)Fcとドライバ要求駆動力(指示トルク)Fdとの関係から得られる車両動作を図18のように図示することができる。なお、アクセル開度を一定に保っていることを前提としている。また、補正量(反発力)Fcは、前記第1の反発力F_THW又は第2の反発力F_TTCである。
【0081】
自車両300が前方車両400に接近していき、その車間距離がある距離に達すると、図18中(B)に示すように、補正量(反発力)Fcが発生するとともに、車間距離の増加に応じて補正量(反発力)Fcが増加するようになる。一方、アクセル開度が一定であるので、ドライバ要求駆動力Fdは、図18中(A)に示すように、車間距離に依らず一定値をとる。
【0082】
この場合、図19中(C)に示すように、ドライバ要求駆動力Fdと補正量(反発力)Fcとの差分値(Fd−Fc)として得られる実制駆動力は、ある車間距離まではドライバ要求駆動力Fdそのものの値となるが、ある車間距離よりも短くなると減少するようになる。さらに、車間距離が短くなると、実制駆動力は負値に至る。このような場合において、実制駆動力が減少する領域で、その値が正値である領域では、駆動力制御装置10での駆動力制御量の補正により駆動トルクを低減し(前記ステップS44及びステップS45)、また、実制駆動力が減少する領域で、その値が負値となる領域では、駆動力制御装置10の制動力制御量を補正し、すなわちブレーキを作動させ、制動力を増加させている(前記ステップS46及びステップS47)。
【0083】
また、図19は、補正量Fcに基づいた補正による駆動力及び制動力の特性を簡便に示す。
この図19に示すように、アクセルペダル踏み込み量が多い場合、このアクセルペダル踏み込み量に応じた駆動力(ドライバ要求駆動力)を反発力算出補正量Fcにより減少方向に補正し(図中Bとして示す特性)、一方、アクセルペダル踏み込み量が少ない場合、このアクセルペダル踏み込み量に応じた駆動力(ドライバ要求駆動力)が発生しないように補正する(ドライバ要求駆動力を0にする)とともに(図中Cとして示す特性)、アクセルペダル踏み込み量の増加に対して減少する制動力が発生するように補正する(図中Dとして示す特性)。さらに、ブレーキペダル3が踏み込まれた場合、補正量Fcに基づいて制動力が増大する方向に補正し(図中Eとして示す特性)、全体として車両の走行抵抗が補正量Fcに相当するように増大させる。
【0084】
また、走行制御システムでは、以上のような制動力を車両に作用させて接触可能性の報知を行うとともに、警報音による接触可能性の報知も行う(前記ステップS11)。すなわち、走行制御システムでは、車間時間THWが車間時間基準の警告音用しきい値THW_W_Th未満、又は衝突時間TTCが衝突時間基準の警告音用しきい値TTC_W_Th未満の場合、警報ブザー8により警報音を出力する(前記ステップS51及びステップS52)。これにより、接触可能性がある場合に所定のタイミングで警報音が出力される。
【0085】
例えば、通常時において、すなわち車間時間基準の警告音用しきい値THW_W_Thを通常時のしきい値ThTHWW_0に設定し、衝突時間基準の警告音用しきい値TTC_W_Thを通常時のしきい値ThTTCW_0に設定している場合において、しきい値ThTHWW_0が車間時間用しきい値THW_Th用のしきい値ThTHW_0と同じ値であり(しきい値ThTHWW_0=しきい値ThTHW_0)、しきい値ThTTCW_0が衝突時間用しきい値TTC_Th用のしきい値ThTTC_0と同じ値である場合には(ThTTCW_0=ThTTC_0)、制動力による接触可能性の報知タイミングに警報音も出力するようになる。これにより、運転者は、車両が減速挙動を始めたことと、その減速挙動の開始タイミングで出力される警報音とにより、自車両が前方車両と接触する可能性があることを知ることができる。
【0086】
ここで、前述したように、走行制御システムでは、自車両の走行環境に基づいて各種しきい値を設定している(前記ステップS8)。具体的には次のようにである。
自車両に朝日或いは西日があたる場合、又は自車両が夜間走行している場合、図20及び図21に示すように、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_1(ThTHWW_1>ThTHWW_0)に設定し、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_1(ThTCCW_1>ThTCCW_0)に設定する(THW_W_TH=ThTHWW_1、TTC_W_TH=ThTTCW_1(ステップS13))。
【0087】
また、自車両が走行している道路が低μ路の場合、雨或いは霧のなかを走行している場合、又は自車両が走行している道路が降坂路の場合、図22、図23及び図24に示すように、車間時間用しきい値THW_Thをしきい値ThTHW_1(ThTHW_1>ThTHW_0)に設定し、衝突時間用しきい値TTC_Thをしきい値ThTTC_1(ThTTC_1>ThTTC_0)に設定し、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_1(ThTHWW_1>ThTHWW_0)に設定し、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_1(ThTCCW_1>ThTCCW_0)に設定する(THW_Th=ThTHW_1、TTC_Th=ThTTC_1、THW_W_TH=ThTHWW_1、TTC_W_TH=ThTTCW_1(ステップS19))。
【0088】
また、自車両が走行している道路が登坂路の場合、図25に示すように、車間時間用しきい値THW_Thをしきい値ThTHW_2(ThTHW_2<ThTHW_0)に設定し、衝突時間用しきい値TTC_Thをしきい値ThTTC_2(ThTTC_2<ThTTC_0)に設定し、車間時間基準の警告音用しきい値THW_W_Thをしきい値ThTHWW_2(ThTHWW_2<ThTHWW_0)に設定し、衝突時間基準の警告音用しきい値TTC_W_Thをしきい値ThTCCW_2(ThTCCW_2<ThTCCW_0)に設定する(THW_Th=ThTHW_2、TTC_Th=ThTTC_2、THW_W_TH=ThTHWW_2、TTC_W_TH=ThTTCW_2(ステップS20))。
【0089】
そして、走行環境が前述のいずれにも該当しない場合(通常時の場合)、すなわち、自車両に朝日又は西日があたっていない場合、夜間走行でない場合、自車両が走行している道路が低μ路でない場合、雨及び霧のなかを走行していない場合、及び自車両が走行している道路が平坦路の場合、車間時間用しきい値THW_Thを通常時のしきい値ThTHW_0に設定し、衝突時間用しきい値TTC_Thを通常時のしきい値ThTTC_0に設定し、車間時間基準の警告音用しきい値THW_W_Thを通常時のしきい値ThTHWW_0に設定し、衝突時間基準の警告音用しきい値TTC_W_Thを通常時のしきい値ThTCCW_0に設定する(THW_Th=ThTHW_0、TTC_Th=ThTTC_0、THW_W_TH=ThTHWW_0、TTC_W_TH=ThTTCW_0(ステップS18))。
【0090】
ここで、車間時間用しきい値THW_Thや衝突時間用しきい値TTC_Thは、制動力による接触可能性の報知タイミングを規定するものであり、また、衝突時間基準の警告音用しきい値TTC_W_Thや衝突時間基準の警告音用しきい値TTC_W_Thは警報音の出力タイミングを規定するものである。よって、自車両に朝日或いは西日があたる場合には、又は自車両が夜間走行している場合には、警報音の出力タイミングが通常時よりも早くなる。また、自車両が走行している道路が低μ路の場合、雨或いは霧のなかを走行している場合、又は自車両が走行している道路が降坂路の場合には、制動力による接触可能性の報知タイミングが通常時よりも早くなるとともに、警報音の出力タイミングが通常時よりも早くなる。さらに、自車両が走行している道路が登坂路の場合には、制動力による接触可能性の報知タイミングが通常時よりも遅くなるとともに、警報音の出力タイミングが通常時よりも遅くなる。
【0091】
このように、走行制御システムでは、自車両の走行環境に基づいて各種しきい値を変更することで、自車両の走行環境に応じたタイミングで、制動力による接触可能性の報知をしたり、警報音を出力したりする。
次に効果を説明する。
前述したように、前方車両への接近状態に応じて仮想的な弾性体の反発力を算出し、この反発力を絶対的な補正量として、この絶対的な補正量を実現するような駆動力補正量及び制動力補正量を駆動力制御装置10及び制動力制御装置20それぞれに出力し、ドライバ要求駆動力及びドライバ要求制動力を補正している。これにより、自車両が前方車両にある程度近づいた場合、反発力に応じて自車両に鈍い加速を与え或いは自車両を減速させ、運転者に接触可能性の報知を行っている。
【0092】
また、前記モデルを自車両が前方車両に近づくにつれて前記反発力が大きくなるようにすることで、自車両が前方車両に近づくにつれて走行抵抗が大きくなるので、自車両が前方車両へ接触する可能性の高まりに応じて走行抵抗を連続的に変化させて運転者に接触可能性を報知することができる。これにより、運転者は、走行抵抗の大きさに応じて前方車両への接触可能性の高さを推測できるようになる。
【0093】
そして、前述したように、自車両に朝日或いは西日があたる場合、又は自車両が夜間走行している場合には、警報音の出力タイミングが通常時よりも早くしている。運転者の視線に太陽光が入る可能性が高い場合、すなわち朝日又は西日があたる場合には、運転者は視界不良のために前方車両の挙動を正確に把握できなくなる場合がある。また、夜間走行している場合、外灯がないことや対向車のライトで、運転者は視界不良のために前方車両の挙動を正確に把握できなくなる場合がある。さらに、夜間では、疲労により運転者の判断力が低下する。よって、自車両に朝日或いは西日があたる場合、又は自車両が夜間走行している場合、警報音の出力タイミングを通常時よりも早くすることで、前方車両に接近していることを早い時期に運転者に認識させることができる。一方、このような場合でも、制動力による接触可能性の報知タイミングの変更はしておらず、これにより、接触可能性の報知のための制動力の介入タイミングが通常時のままで維持され、最適タイミングで制動力による接触可能性の報知を作動させることができる。これにより、運転者に煩わしさを感じさせてしまうことを防止できる。
【0094】
また、自車両が走行している道路が低μ路の場合、雨或いは霧のなかを走行している場合、又は自車両が走行している道路が降坂路の場合には、制動力による接触可能性の報知タイミングを通常時よりも早くするとともに、警報音の出力タイミングを通常時よりも早くしている。
ここで、路面が滑りやすい道路(低μ路)では、前方車両が減速する可能性があり、また、自車両の停止距離も長くなることも予想される。このような場合には、前方車両との車間距離に余裕を持たせて、運転者に安心感を与える必要がある。よって、自車両が低μ路を走行している場合、警報音の出力タイミングを通常時よりも早くすることで、前方車両に接近していることを早い時期に運転者に認識させることができる。また、制動力による接触可能性の報知タイミングを通常時よりも早くすることで、制動力による接触可能性の報知を最適タイミングで作動させることができ、運転者に安心感を与えることができる。
【0095】
また、雨又は霧のなかを走行している場合、運転者は視界不良のための前方車両の挙動を正確に把握できなくなる場合がある。また、走行路面が濡れているので、滑りやすくなっている。よって、自車両が雨又は霧のなかを走行している場合、警報音の出力タイミングを通常時よりも早くすることで、前方車両に接近していることを早い時期に運転者に認識させることができる。また、制動力による接触可能性の報知タイミングを通常時よりも早くすることで、制動力による接触可能性の報知を最適タイミングで作動させることができ、運転者に安心感を与えることができる。
【0096】
また、降坂路の場合、車両は速度がでやすくなる。よって、警報音の出力タイミングを通常時よりも早くし、また、制動力による接触可能性の報知タイミングを通常時よりも早くすることで、運転者に安心感を与えることができる。
このように、自車両が走行している道路が低μ路の場合、雨或いは霧のなかを走行している場合、又は自車両が走行している道路が降坂路の場合等といった、接触可能性の報知のための制動力が作動すれば有効に作用するような場合に、制動力による接触可能性の報知タイミングも通常時よりも早くすることで、接触可能性の報知の効果を高めることができる。
【0097】
また、自車両が走行している道路が登坂路の場合には、制動力による接触可能性の報知タイミングを通常時よりも遅くするとともに、警報音の出力タイミングを通常時よりも遅くしている。登坂路の場合には、運転者の操作で車両は容易に減速できる。よって、このような場合に、制動力による接触可能性の報知タイミングを通常時よりも遅くするとともに、警報音の出力タイミングを通常時よりも遅くすることで、最適タイミングで制動力による接触可能性の報知や警告音の出力をすることができる。これにより、運転者に運転者に煩わしさを感じさてしますことを防止できる。
【0098】
以上、本発明の実施の形態について説明した。しかし、本発明は、前述の実施の形態として実現されることに限定されるものではない。
すなわち、前述の実施の形態では、制動力による接触可能性の報知タイミングと警告音の出力タイミングとは、通常時に同じであるとして説明しているが、これに限定されるものではない。すなわち、制動力による接触可能性の報知タイミングに対して、警告音の出力タイミングが早くても、遅くてもよい。例えば、通常時において、制動力による接触可能性の報知タイミングに対して警告音の出力タイミングを早くている場合において、自車両に朝日又は西日があたる場合や自車両が夜間走行している場合には、警告音は、制動力による接触可能性の報知タイミングに対して、さらに早いタイミングで出力されるようになる。
【0099】
また、前述の実施の形態では、しきい値設定を、走行状態に基づいて予め用意している値を設定(代入設定)することで行っているが、これに限定されるものでもない。例えば、走行状態に応じて、通常時のしきい値に加算したり、通常時のしきい値から減算したりしてもよい。また、この場合には、通常時のしきい値に加算する加算値や通常時のしきい値から減算する減算値を、走行状態毎に異なるようにしてもよい。これにより、全ての走行状態を加味したしきい値(総合評価からなるしきい値)を設定することができるようになる。
【0100】
また、前述の実施の形態では、警報ブザー8からの警報音を出力しているが、これに限定されるものではなく、他の出力手段を用いてもよい。例えば、報知表示手段としての表示装置を備えて、前述した警報音と同様に、独自の出力タイミングで警報画像を出力してもよい。また、警報ブザー8と表示装置とを備えてもよく、この場合、警報音の出力と警報表示とを同時に行ったりする。
【0101】
また、前述の実施の形態では、補正量Fcの算出を、自車両の前方に仮想的な弾性体を設けて行う場合について説明したが、これに限定されるものではなく、車間距離を関数にして増加するような量を他の手法を用いて算出するようにしてもよい。
なお、前述の実施の形態の説明において、コントローラ5による前記図8に示すステップS1、ステップS3〜ステップS7の処理、前記レーダ装置30及び障害物検出処理装置2は、自車両が前方に存在する物体に接触する可能性を検出する接触可能性検出手段を実現しており、コントローラ5による前記図8に示すステップS9及びステップS10の処理は、前記接触可能性検出手段が検出した接触可能性に基づいて、駆動トルク又は制動トルクの少なくとも一方を変化させて接触可能性の報知を行う第1の接触可能性報知手段を実現しており、前記図8に示すステップS11及び警報ブザー8は、前記接触可能性検出手段が検出した接触可能性に基づいて、前記第1の接触可能性報知手段とは異なる出力手段により接触可能性の報知を行う第2の接触可能性報知手段を実現しており、前記図8に示すステップS2の処理及びカメラ7は、走行環境を検出する走行環境検出手段を実現しており、前記図11及び図12に示す処理(前記図8に示すステップS8)は、前記走行環境検出手段が検出した走行環境に基づいて、前記第1及び第2の接触可能性報知手段それぞれの報知タイミングを設定するタイミング設定手段を実現している。
【図面の簡単な説明】
【図1】本発明の実施の形態の走行制御システムの構成を示す図である。
【図2】前記走行制御システムの駆動力制御装置の構成を示すブロック図である。
【図3】アクセルペダル踏み込み量とドライバ要求駆動力との関係を定めた特性マップを示す特性図である。
【図4】前記走行制御システムの制動力制御装置の構成を示すブロック図である。
【図5】ブレーキペダル踏み込み力とドライバ要求制動力との関係を定めた特性マップを示す特性図である。
【図6】前記走行制御システムのレーダ装置の構成を示す図である。
【図7】前記レーダ装置によるスキャニングにより得られる障害物の検出結果を示す図である。
【図8】前記走行制御システムのコントローラの処理手順を示すフローチャートである。
【図9】走行制御システムが行う自車両の予測進路の説明に使用した図である。
【図10】前記予測進路に自車両の幅を考慮した予測走路の説明に使用した図である。
【図11】前記コントローラの処理中のしきい値設定処理の前半の処理手順を示すフローチャートである。
【図12】前記コントローラの処理中のしきい値設定処理の後半の処理手順を示すフローチャートである。
【図13】自車両の前方に仮想的な弾性体を設けた補正量算出のためのモデルの説明に使用した図である。
【図14】車間時間と衝突時間とに対応して仮想的な弾性体を設けたモデルの説明に使用した図である。
【図15】前記コントローラの処理中の補正量算出処理の処理手順を示すフローチャートである。
【図16】前記コントローラの処理中の補正量出力処理の処理手順を示すフローチャートである。
【図17】前記コントローラの処理中の警報音出力処理の処理手順を示すフローチャートである。
【図18】反発力、指示トルク、及び実制駆力の関係を示す図である。
【図19】補正量Fcに基づいて補正した駆動力及び制動力の特性の説明に使用した図である。
【図20】自車両に朝日又は西日があたる場合のしきい値の設定の説明に使用した図である。
【図21】自車両が夜間走行している場合のしきい値の設定の説明に使用した図である。
【図22】自車両が走行している道路が低μ路の場合のしきい値の設定の説明に使用した図である。
【図23】雨或いは霧のなかを走行している場合のしきい値の設定の説明に使用した図である。
【図24】自車両が走行している道路が降坂路の場合のしきい値の設定の説明に使用した図である。
【図25】自車両が走行している道路が登坂路の場合のしきい値の設定の説明に使用した図である。
【符号の説明】
1 車速センサ
2 障害物検出処理装置
3 ブレーキペダル
4 アクセルペダル
5 コントローラ
6 エンジン
7 カメラ
8 警報ブザー
10 駆動力制御装置
11 ドライバ要求駆動力算出部
12 加算器
13 エンジンコントローラ
20 制動力制御装置
21 ドライバ要求制動力算出部
22 加算器
23 ブレーキ液圧コントローラ
30 レーダ装置
31 発光部
32 受光部
200 前方障害物
300 自車両
400 前方車両(前方に存在する物体又は先行車両)
500,501,502 仮想弾性体
Claims (11)
- 自車両が前方に存在する物体に接触する可能性を検出する接触可能性検出手段と、
前記接触可能性検出手段が検出した接触可能性に基づいて、駆動トルク又は制動トルクの少なくとも一方を変化させて接触可能性の報知を行う第1の接触可能性報知手段と、
前記接触可能性検出手段が検出した接触可能性に基づいて、前記第1の接触可能性報知手段とは異なる出力手段により接触可能性の報知を行う第2の接触可能性報知手段と、
走行環境を検出する走行環境検出手段と、
前記走行環境検出手段が検出した走行環境に基づいて、前記第1及び第2の接触可能性報知手段それぞれの報知タイミングを設定するタイミング設定手段と、
を備えたことを特徴とする車両用報知装置。 - 前記タイミング設定手段は、前記走行環境検出手段が運転者の視線に太陽光が入ることを検出した場合、前記第2の接触可能性報知手段の報知タイミングを前記第1の接触可能性報知手段の報知タイミングよりも早くすることを特徴とする請求項1記載の車両用報知装置。
- 前記タイミング設定手段は、前記走行環境検出手段が自車両が夜間走行していることを検出した場合、前記第2の接触可能性報知手段の報知タイミングを前記第1の接触可能性報知手段の報知タイミングよりも早くすることを特徴とする請求項1記載の車両用報知装置。
- 前記タイミング設定手段は、前記走行環境手段が自車両が走行する道路が低μ路であることを検出した場合、前記第1及び第2の接触可能性報知手段の報知タイミングを共に早くすることを特徴とする請求項1乃至3のいずれかに記載の車両用報知装置。
- 前記タイミング設定手段は、前記走行環境検出手段が自車両が走行する道路の前方視界が悪いことを検出した場合、前記第1及び第2の接触可能性報知手段の報知タイミングを共に早くすることを特徴とする請求項1乃至4のいずれかに記載の車両用報知装置。
- 前記タイミング設定手段は、前記走行環境検出手段が自車両が走行する道路が降坂路であることを検出した場合、前記第1及び第2の接触可能性報知手段の報知タイミングを共に早くすることを特徴とする請求項1乃至5のいずれかに記載の車両用報知装置。
- 前記タイミング設定手段は、前記走行環境検出手段が自車両が走行する道路が登坂路であることを検出した場合、前記第1及び第2の接触可能性報知手段の報知タイミングを共に遅くすることを特徴とする請求項1乃至5のいずれかに記載の車両用報知装置。
- 前記第1の接触可能性報知手段は、前記接触可能性を第1の接触可能性報知用しきい値に基づいて判断し、前記第2の接触可能性報知手段は、前記接触可能性を第2の接触可能性報知用しきい値に基づいて判断しており、前記タイミング設定手段は、前記第1の接触可能性報知用しきい値及び第2の接触可能性報知用しきい値の設定により前記第1及び第2の接触可能性報知手段の報知タイミングを設定することを特徴とする請求項1乃至7のいずれかに記載の車両用報知装置。
- 自車両と前方に存在する物体との間の距離を自車両の速度で除して車間時間を算出する車間時間算出手段と、自車両と前方に存在する物体との間の距離を当該自車両と前方に存在する物体との間の相対速度で除して衝突時間を算出する衝突時間算出手段と、を備え、
前記第1の接触可能性報知用しきい値は、前記車間時間算出手段が算出した車間時間と比較して接触可能性の判断をする第1のしきい値と、前記衝突時間算出手段が算出した衝突時間と比較して接触可能性の判断をする第2のしきい値とであり、
前記第2の接触可能性報知用しきい値は、前記車間時間算出手段が算出した車間時間と比較して接触可能性の判断をする第3のしきい値と、前記衝突時間算出手段が算出した衝突時間と比較して接触可能性の判断をする第4のしきい値とであり、
前記タイミング設定手段は、前記第1乃至第4のしきい値の設定により前記第1及び第2の接触可能性報知手段の報知タイミングを設定することを特徴とする請求項8記載の車両用報知装置。 - 前記第2の接触可能性報知手段は、音声出力により接触可能性の報知を行うことを特徴とする請求項1乃至9のいずれかに記載の車両用報知装置。
- 前記第2の接触可能性報知手段は、画像出力により接触可能性の報知を行うことを特徴とする請求項1乃至9のいずれかに記載の車両用報知装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002328172A JP2004164187A (ja) | 2002-11-12 | 2002-11-12 | 車両用報知装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002328172A JP2004164187A (ja) | 2002-11-12 | 2002-11-12 | 車両用報知装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004164187A true JP2004164187A (ja) | 2004-06-10 |
Family
ID=32806543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002328172A Pending JP2004164187A (ja) | 2002-11-12 | 2002-11-12 | 車両用報知装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004164187A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006163942A (ja) * | 2004-12-08 | 2006-06-22 | Nissan Motor Co Ltd | 車両走行状況提示装置及び車両走行状況提示方法 |
| JP2006344032A (ja) * | 2005-06-09 | 2006-12-21 | Fujitsu Ten Ltd | 運転支援装置および運転支援方法 |
| JP2007302041A (ja) * | 2006-05-09 | 2007-11-22 | Toyota Motor Corp | 運転支援装置 |
| JP2009146115A (ja) * | 2007-12-13 | 2009-07-02 | Honda Motor Co Ltd | 車両の走行安全装置 |
| JP2015032107A (ja) * | 2013-08-01 | 2015-02-16 | 本田技研工業株式会社 | 車両周辺監視装置 |
| JP2015101307A (ja) * | 2013-11-28 | 2015-06-04 | マツダ株式会社 | 緊急制動表示灯の制御装置 |
| WO2017183609A1 (ja) * | 2016-04-21 | 2017-10-26 | 株式会社デンソー | 運転支援装置 |
| WO2018173455A1 (ja) * | 2017-03-24 | 2018-09-27 | 株式会社デンソー | 運転支援装置 |
| CN109002041A (zh) * | 2018-08-09 | 2018-12-14 | 北京智行者科技有限公司 | 一种车辆避障方法 |
| JP2020161117A (ja) * | 2019-02-05 | 2020-10-01 | ホンダ リサーチ インスティテュート ヨーロッパ ゲーエムベーハーHonda Research Institute Europe GmbH | 動的環境内での人の行動を補助するための方法および対応するシステム |
-
2002
- 2002-11-12 JP JP2002328172A patent/JP2004164187A/ja active Pending
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006163942A (ja) * | 2004-12-08 | 2006-06-22 | Nissan Motor Co Ltd | 車両走行状況提示装置及び車両走行状況提示方法 |
| JP2006344032A (ja) * | 2005-06-09 | 2006-12-21 | Fujitsu Ten Ltd | 運転支援装置および運転支援方法 |
| US7720586B2 (en) | 2005-06-09 | 2010-05-18 | Fujitsu Ten Limited | Driving support apparatus and driving support method |
| JP4541973B2 (ja) * | 2005-06-09 | 2010-09-08 | 富士通テン株式会社 | 運転支援装置および運転支援方法 |
| JP2007302041A (ja) * | 2006-05-09 | 2007-11-22 | Toyota Motor Corp | 運転支援装置 |
| JP2009146115A (ja) * | 2007-12-13 | 2009-07-02 | Honda Motor Co Ltd | 車両の走行安全装置 |
| JP2015032107A (ja) * | 2013-08-01 | 2015-02-16 | 本田技研工業株式会社 | 車両周辺監視装置 |
| JP2015101307A (ja) * | 2013-11-28 | 2015-06-04 | マツダ株式会社 | 緊急制動表示灯の制御装置 |
| WO2017183609A1 (ja) * | 2016-04-21 | 2017-10-26 | 株式会社デンソー | 運転支援装置 |
| JP2017194861A (ja) * | 2016-04-21 | 2017-10-26 | 株式会社デンソー | 運転支援装置 |
| CN109074745A (zh) * | 2016-04-21 | 2018-12-21 | 株式会社电装 | 驾驶辅助装置 |
| CN109074745B (zh) * | 2016-04-21 | 2024-03-08 | 株式会社电装 | 驾驶辅助装置 |
| WO2018173455A1 (ja) * | 2017-03-24 | 2018-09-27 | 株式会社デンソー | 運転支援装置 |
| JP2018163482A (ja) * | 2017-03-24 | 2018-10-18 | 株式会社デンソー | 運転支援装置 |
| US10723365B2 (en) | 2017-03-24 | 2020-07-28 | Denso Corporation | Driving assistance device |
| CN109002041A (zh) * | 2018-08-09 | 2018-12-14 | 北京智行者科技有限公司 | 一种车辆避障方法 |
| JP2020161117A (ja) * | 2019-02-05 | 2020-10-01 | ホンダ リサーチ インスティテュート ヨーロッパ ゲーエムベーハーHonda Research Institute Europe GmbH | 動的環境内での人の行動を補助するための方法および対応するシステム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3620532B2 (ja) | 車両用報知装置 | |
| JP3882797B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 | |
| JP4026477B2 (ja) | 車両用報知装置 | |
| US7433772B2 (en) | Target speed control system for a vehicle | |
| JP4924590B2 (ja) | 車両用報知装置 | |
| CN101508246B (zh) | 车辆脱离防止装置 | |
| US10759425B2 (en) | Autonomous driving system | |
| JP2017190047A (ja) | 車両走行制御装置 | |
| JP6838525B2 (ja) | 車両制御装置 | |
| JP2005186813A (ja) | 車両用運転支援装置 | |
| JP2004355324A (ja) | 車両用接触回避制御装置 | |
| JP3991928B2 (ja) | 車両用接触回避制御装置 | |
| JP2019043290A (ja) | 車両制御装置 | |
| JP3852397B2 (ja) | 車両用報知装置 | |
| JP2004164187A (ja) | 車両用報知装置 | |
| JP2017117192A (ja) | 運転支援装置 | |
| JP2004161100A (ja) | 車両用報知装置 | |
| JP2004114906A (ja) | 追従走行制御装置 | |
| JP3770251B2 (ja) | 車両用報知装置及びその方法 | |
| JP3969287B2 (ja) | 車両用報知装置 | |
| JP2004164188A (ja) | 車両用報知装置 | |
| JP4585388B2 (ja) | 車両用報知装置及びその方法 | |
| JP4370771B2 (ja) | 車両用報知装置 | |
| JPH0769096A (ja) | 自動車の走行制御装置 | |
| JP3938013B2 (ja) | 車両用報知装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060905 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070109 |