JP6415809B2 - 駆動ユニット及び電動補助自転車 - Google Patents
駆動ユニット及び電動補助自転車 Download PDFInfo
- Publication number
- JP6415809B2 JP6415809B2 JP2013252301A JP2013252301A JP6415809B2 JP 6415809 B2 JP6415809 B2 JP 6415809B2 JP 2013252301 A JP2013252301 A JP 2013252301A JP 2013252301 A JP2013252301 A JP 2013252301A JP 6415809 B2 JP6415809 B2 JP 6415809B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- crankshaft
- drive unit
- unit
- rotation angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
- B62M6/50—Control or actuating devices therefor characterised by detectors or sensors, or arrangement thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/55—Rider propelled cycles with auxiliary electric motor power-driven at crank shafts parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/70—Rider propelled cycles with auxiliary electric motor power-driven at single endless flexible member, e.g. chain, between cycle crankshaft and wheel axle, the motor engaging the endless flexible member
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
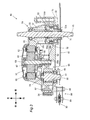
図1に、一実施形態に係る電動補助自転車1の概略構成を示す。図2に、電動補助自転車1の駆動ユニット40及び従動スプロケット45の概略構成を示す。この電動補助自転車1は、後述するように、運転者がペダル33,34(図1参照)を踏み込むことにより得られるペダル踏力を、電動モータ61(図3参照)から出力される駆動力によってアシストする。すなわち、電動補助自転車1は、一般的な自転車の構成に加えて、ペダル踏力をアシストするための駆動機構を有する。
図4に、電動補助自転車1において、電動モータ61によるアシスト制御を行う際の信号の授受及び動力の伝達をブロック図で示す。この図4では、アシスト制御を行う際の信号の授受を破線矢印によって示すととともに、動力の伝達を実線矢印で示す。なお、図4中の符号のうち、図1から図3に示す符号と同一の符号は、電動補助自転車1における同一の構成を示す。
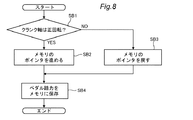
次に、上述のような構成を有する電動補助自転車1において、アシスト制御停止部106がアシスト制御を停止すると判定するアシスト停止判定を、図7に示すフローに基づいて説明する。
既述のように、メモリ105には、クランク軸41が1回転の半周分を回転する間にペダル踏力検知部101によって検知されたペダル踏力が記憶されている。このメモリ105は、例えばリングバッファであり、各記憶領域に回転角度毎(クランク回転検出部58から出力されるパルス信号毎)のペダル踏力が記憶される。
以上、本発明の実施の形態を説明したが、上述した実施の形態は本発明を実施するための例示に過ぎない。よって、本発明は上述した実施の形態に限定されることなく、その趣旨を逸脱しない範囲内で上述した実施の形態を適宜変形して実施することが可能である。
33,34 ペダル
40 駆動ユニット
41 クランク軸
57 トルク検出部
58 クランク回転検出部
61 電動モータ
105 メモリ(記憶部)
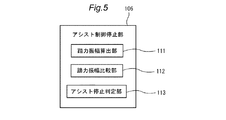
106 アシスト制御停止部
111 踏力振幅算出部(トルク振幅算出部)
113 アシスト停止判定部
Claims (9)
- 運転者のペダル踏力を電動モータの駆動力によってアシストする駆動ユニットであって、
ペダルが接続されるクランク軸と、
前記クランク軸の回転角度を検出するクランク回転検出部と、
前記クランク軸に発生するトルクを検出するトルク検出部と、
前記クランク回転検出部で検出された回転角度が所定の回転角度の範囲にある間に前記トルク検出部によって検出されるトルクの最大値と最小値の差を算出することにより求められるトルクの振幅に基づいて、アシスト制御を停止するアシスト制御停止部とを備える、駆動ユニット。 - 請求項1に記載の駆動ユニットにおいて、
前記アシスト制御停止部は、
前記トルクの振幅を算出するトルク振幅算出部と、
前記トルク振幅算出部によって求められたトルクの振幅が閾値以下の場合にアシスト制御の停止を判定するアシスト停止判定部とを備える、駆動ユニット。 - 請求項2に記載の駆動ユニットにおいて、
前記所定の回転角度の範囲は、基準となる角度位置から所定の角度位置までの角度範囲であって、当該角度範囲において、クランク軸に生じるペダル踏力がクランク軸の回転角度に応じて変動可能な角度範囲である、駆動ユニット。 - 請求項2又は3に記載の駆動ユニットにおいて、
前記クランク軸の回転角度を検出するクランク回転検出部と、
前記クランク回転検出部によって検出されたクランク軸の回転角度ごとに、前記トルク検出部によって検出されたトルクを記憶する記憶部とをさらに備え、
前記トルク振幅算出部は、前記記憶部に記憶されているトルクのうち最大値と最小値との差を、前記トルクの振幅として算出可能に構成されている、駆動ユニット。 - 請求項4に記載の駆動ユニットにおいて、
前記記憶部は、前記トルク検出部によって検出されたトルクのうち、前記所定の回転角度の範囲に対応するトルクを記憶可能に構成されている、駆動ユニット。 - 請求項2から5のいずれか一つに記載の駆動ユニットにおいて、
前記閾値は、前記クランク軸にトルクが生じていないときの前記トルク検出部の出力の変動幅を下限とする、駆動ユニット。 - 請求項1〜6のいずれか1つに記載の駆動ユニットにおいて、
前記アシスト制御停止部は、前記クランク回転検出部で検出された回転角度が所定の回転角度の範囲にある間に前記トルク検出部によって検出されるトルクの振幅に基づいて、前記ペダルの踏み込み停止を判定してアシスト制御を停止する、駆動ユニット。 - 請求項1から7のいずれか一つに記載の駆動ユニットにおいて、
前記所定の回転角度の範囲は180度以上である、駆動ユニット。 - 請求項1から8のいずれか一つに記載の駆動ユニットを搭載した電動補助自転車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013252301A JP6415809B2 (ja) | 2012-12-17 | 2013-12-05 | 駆動ユニット及び電動補助自転車 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012275150 | 2012-12-17 | ||
| JP2012275150 | 2012-12-17 | ||
| JP2013252301A JP6415809B2 (ja) | 2012-12-17 | 2013-12-05 | 駆動ユニット及び電動補助自転車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014139067A JP2014139067A (ja) | 2014-07-31 |
| JP6415809B2 true JP6415809B2 (ja) | 2018-10-31 |
Family
ID=49884937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013252301A Active JP6415809B2 (ja) | 2012-12-17 | 2013-12-05 | 駆動ユニット及び電動補助自転車 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9199693B2 (ja) |
| EP (1) | EP2743165B1 (ja) |
| JP (1) | JP6415809B2 (ja) |
| CN (1) | CN103863506B (ja) |
| CA (1) | CA2836764C (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5575938B1 (ja) * | 2013-02-07 | 2014-08-20 | 株式会社シマノ | 自転車用制御装置 |
| JP2015044526A (ja) * | 2013-08-29 | 2015-03-12 | 太陽誘電株式会社 | モータ駆動制御装置及び電動アシスト車 |
| US20160339992A1 (en) * | 2014-01-15 | 2016-11-24 | Sunstar Giken Kabushiki Kaisha | Power-assisted unit, power-assisted moving vehicle, power-assisted moving vehicles set, and power-assisted moving vehicle controlling method |
| DE102014218683A1 (de) * | 2014-09-17 | 2016-03-17 | Continental Teves Ag & Co. Ohg | Unterstützung für Runden Tritt am Fahrrad |
| US9802674B2 (en) | 2014-10-06 | 2017-10-31 | Ford Global Technologies, Llc | Power unit attachable to a bicycle |
| ES2873174T3 (es) * | 2014-11-18 | 2021-11-03 | Zehus S P A | Sistema para controlar el movimiento de un vehículo de propulsión humana de tipo impulsivo |
| DE102014224066A1 (de) * | 2014-11-26 | 2016-06-02 | Robert Bosch Gmbh | Fahrzeug mit elektrischem Antrieb, insbesondere Elektrofahrrad, und Verfahren zum Betreiben eines derartigen Fahrzeugs |
| ITUB20150006A1 (it) * | 2015-02-10 | 2016-08-10 | Zehus S P A | Sistema di interfaccia uomo-macchina per una bicicletta a pedalata assistita e bicicletta a pedalata assistita provvista di tale sistema di interfaccia uomo-macchina |
| US10118667B2 (en) * | 2015-05-28 | 2018-11-06 | Shimano Inc. | Bicycle motor control system |
| JP2017013524A (ja) * | 2015-06-26 | 2017-01-19 | ヤマハ発動機株式会社 | 電動補助自転車 |
| US9857252B2 (en) * | 2015-11-24 | 2018-01-02 | GM Global Technology Operations LLC | Automated e-assist adjustment for an e-bike for elevation gains and loss |
| JP6721403B2 (ja) * | 2016-04-28 | 2020-07-15 | ヤマハ発動機株式会社 | 電動補助自転車 |
| JP6761696B2 (ja) * | 2016-08-18 | 2020-09-30 | 株式会社シマノ | 自転車用制御装置および自転車の制御方法 |
| TWI622524B (zh) * | 2016-12-28 | 2018-05-01 | Dual mode application and monitoring system for electric bicycle | |
| DE102017219398A1 (de) * | 2017-10-27 | 2019-05-02 | Brose Antriebstechnik GmbH & Co. Kommanditgesellschaft, Berlin | Hybridantrieb für ein Elektrofahrrad |
| TWI651237B (zh) * | 2017-11-13 | 2019-02-21 | 財團法人金屬工業研究發展中心 | 電助自行車及其輔助動力的控制方法 |
| US10322770B1 (en) | 2017-11-27 | 2019-06-18 | Metal Industries Research & Development Centre | Electricity aided bicycle and auxiliary power controlling method thereof |
| CN109895929B (zh) * | 2017-12-07 | 2022-03-29 | 弗莱克斯有限公司 | 用于电动助力自行车的电子离合器 |
| JP7373762B2 (ja) | 2018-11-13 | 2023-11-06 | パナソニックIpマネジメント株式会社 | 電動自転車用動力伝達ユニット、及び電動自転車 |
| TWI770430B (zh) * | 2019-10-24 | 2022-07-11 | 英屬開曼群島商睿能創意公司 | 電動助力車、傳動裝置及控制方法 |
| CN112706871B (zh) * | 2019-10-24 | 2022-06-21 | 睿能创意公司 | 电动助力车、传动装置及控制方法 |
| JP7039545B2 (ja) * | 2019-12-27 | 2022-03-22 | ヤマハ発動機株式会社 | 電動補助自転車、その駆動システム、及び制御方法 |
| CN114228891B (zh) * | 2021-12-11 | 2023-05-02 | 上海电机学院 | 一种基于循环充供电的自行车助力装置及方法 |
| CN114212178B (zh) * | 2022-02-22 | 2022-05-13 | 品上佳自行车(深圳)有限公司 | 新能源电动自行车的动力装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5370200A (en) * | 1992-05-11 | 1994-12-06 | Yamaha Hatsudoki Kabushiki Kaisha | Bicycle with electric motor |
| TW467091U (en) | 1994-03-29 | 2001-12-01 | Sanyo Electric Co | Electric bicycle |
| JP3276782B2 (ja) * | 1994-08-18 | 2002-04-22 | 本田技研工業株式会社 | 電動補助自転車 |
| TW404383U (en) | 1995-02-28 | 2000-09-01 | Sanyo Electric Co | Electric bicycle |
| JP3108311B2 (ja) | 1995-02-28 | 2000-11-13 | 三洋電機株式会社 | 電動機停止機能付き電動自転車 |
| JP3440729B2 (ja) * | 1996-12-06 | 2003-08-25 | 松下電器産業株式会社 | 電気自転車 |
| US5922035A (en) * | 1997-12-03 | 1999-07-13 | Winston Hsu | Fuzzy logic control system for electrical aided vehicle |
| JP2005041352A (ja) * | 2003-07-23 | 2005-02-17 | Moric Co Ltd | 電動補助自転車のトルク制御方法 |
| EP2289794A4 (en) * | 2008-05-19 | 2012-04-25 | Sunstar Engineering Inc | BIKE WITH ELECTROMOTIC AUXILIARY DRIVE |
| JP5564391B2 (ja) * | 2010-09-30 | 2014-07-30 | 本田技研工業株式会社 | 電動補助自転車の制御装置 |
| JP5564390B2 (ja) | 2010-09-30 | 2014-07-30 | 本田技研工業株式会社 | 電動補助自転車の制御装置 |
| JP5564389B2 (ja) * | 2010-09-30 | 2014-07-30 | 本田技研工業株式会社 | 電動補助自転車の制御装置 |
| JP5684595B2 (ja) | 2011-02-07 | 2015-03-11 | ヤマハ発動機株式会社 | 電動補助自転車 |
| JP2012214151A (ja) | 2011-03-31 | 2012-11-08 | Honda Motor Co Ltd | 電動補助自転車の補助力制御装置 |
-
2013
- 2013-12-05 JP JP2013252301A patent/JP6415809B2/ja active Active
- 2013-12-16 US US14/107,012 patent/US9199693B2/en active Active
- 2013-12-16 EP EP13197312.5A patent/EP2743165B1/en active Active
- 2013-12-16 CA CA2836764A patent/CA2836764C/en not_active Expired - Fee Related
- 2013-12-17 CN CN201310694117.XA patent/CN103863506B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CA2836764C (en) | 2016-04-26 |
| JP2014139067A (ja) | 2014-07-31 |
| CN103863506B (zh) | 2016-08-17 |
| US9199693B2 (en) | 2015-12-01 |
| US20140166386A1 (en) | 2014-06-19 |
| EP2743165B1 (en) | 2020-09-09 |
| CA2836764A1 (en) | 2014-06-17 |
| EP2743165A1 (en) | 2014-06-18 |
| CN103863506A (zh) | 2014-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6415809B2 (ja) | 駆動ユニット及び電動補助自転車 | |
| CA2836982C (en) | Driving unit and battery-assisted bicycle | |
| JP6228442B2 (ja) | 駆動ユニット及び電動補助自転車 | |
| TWI500554B (zh) | Bicycle control device | |
| TWI776972B (zh) | 人力驅動車輛用控制裝置 | |
| JP6226825B2 (ja) | 電動補助自転車 | |
| WO2014184826A1 (ja) | 電動アシスト自転車 | |
| JP7619802B2 (ja) | 人力駆動車用の制御装置および人力駆動車用の制御システム | |
| JP7497214B2 (ja) | 制御装置および変速システム | |
| JP7266987B2 (ja) | 人力駆動車用の制御装置および人力駆動車用の制御方法 | |
| JP6095446B2 (ja) | 電動アシスト自転車 | |
| JP5255347B2 (ja) | アシスト力付き車両 | |
| JP2019064353A (ja) | 自転車用制御装置 | |
| JP2014015211A (ja) | 自転車用制御装置 | |
| JP3810130B2 (ja) | 電動モータ付き乗り物およびその制御方法 | |
| JP2004243920A (ja) | 電動補助車両の補助力制御装置 | |
| JPH05310175A (ja) | 電動モータ付き自転車 | |
| JP7349304B2 (ja) | 制御装置 | |
| JP7692795B2 (ja) | 人力駆動車用の制御装置 | |
| JP2019217888A (ja) | ギアセンサ、電動アシスト自転車、および制御方法 | |
| JP6947689B2 (ja) | 人力駆動車用制御装置および人力駆動車用駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161028 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170516 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170714 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171023 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180403 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180627 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20180704 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181003 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6415809 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |