JP6406215B2 - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP6406215B2 JP6406215B2 JP2015218983A JP2015218983A JP6406215B2 JP 6406215 B2 JP6406215 B2 JP 6406215B2 JP 2015218983 A JP2015218983 A JP 2015218983A JP 2015218983 A JP2015218983 A JP 2015218983A JP 6406215 B2 JP6406215 B2 JP 6406215B2
- Authority
- JP
- Japan
- Prior art keywords
- soc
- predicted
- behavior
- battery
- discharge
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 229920006395 saturated elastomer Polymers 0.000 claims description 43
- 230000008859 change Effects 0.000 claims description 39
- 230000001172 regenerating effect Effects 0.000 claims description 37
- 238000010248 power generation Methods 0.000 claims description 22
- 230000007613 environmental effect Effects 0.000 claims description 10
- 238000012937 correction Methods 0.000 claims description 7
- 230000007423 decrease Effects 0.000 claims description 5
- 230000006866 deterioration Effects 0.000 claims description 5
- 238000007599 discharging Methods 0.000 claims description 4
- 230000009467 reduction Effects 0.000 claims description 3
- 238000004378 air conditioning Methods 0.000 claims description 2
- 230000001629 suppression Effects 0.000 claims 2
- 241000287463 Phalacrocorax Species 0.000 claims 1
- 238000000034 method Methods 0.000 description 34
- 230000008569 process Effects 0.000 description 28
- 239000000446 fuel Substances 0.000 description 17
- 238000004364 calculation method Methods 0.000 description 16
- 230000005540 biological transmission Effects 0.000 description 14
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 12
- 238000010586 diagram Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 5
- HEZMWWAKWCSUCB-PHDIDXHHSA-N (3R,4R)-3,4-dihydroxycyclohexa-1,5-diene-1-carboxylic acid Chemical compound O[C@@H]1C=CC(C(O)=O)=C[C@H]1O HEZMWWAKWCSUCB-PHDIDXHHSA-N 0.000 description 3
- 239000000498 cooling water Substances 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000007710 freezing Methods 0.000 description 1
- 230000008014 freezing Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- B60K35/28—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/442—Series-parallel switching type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
- B60K6/485—Motor-assist type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/15—Preventing overcharging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/16—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to battery ageing, e.g. to the number of charging cycles or the state of health [SoH]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/11—Controlling the power contribution of each of the prime movers to meet required power demand using model predictive control [MPC] strategies, i.e. control methods based on models predicting performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/12—Controlling the power contribution of each of the prime movers to meet required power demand using control strategies taking into account route information
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/02—Knowledge representation; Symbolic representation
- G06N5/022—Knowledge engineering; Knowledge acquisition
-
- B60K2360/00—
-
- B60K2360/169—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/545—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
- B60L2240/622—Vehicle position by satellite navigation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/64—Road conditions
- B60L2240/642—Slope of road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/64—Road conditions
- B60L2240/645—Type of road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/64—Road conditions
- B60L2240/647—Surface situation of road, e.g. type of paving
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/66—Ambient conditions
- B60L2240/662—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/54—Energy consumption estimation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle for navigation systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/93—Conjoint control of different elements
Description
しかし、長い下り坂で回生発電し続けると、バッテリの残容量を表すSOCが上限値に到達してバッテリが回生電力を充電できない飽和状態になってしまう可能性ある。
まず、図1に基づいてハイブリッド車の制御システムの概略構成を説明する。
温水暖房装置23は、エンジン11の冷却水通路(いわゆるウォータジャケット)に、暖房用の温水回路25が接続されている。この温水回路25に、暖房用のヒータコア26と電動ウォータポンプ27が設けられている。この電動ウォータポンプ27によりエンジン11とヒータコア24との間で冷却水(温水)を循環させるようになっている。ヒータコア24の近傍には、温風を発生させるブロアファン28が配置されている。
SOC=残容量/満充電容量×100
以下、本実施例1でハイブリッドECU39が実行する図4乃至図6の各ルーチンの処理内容を説明する。
図4に示すメイン制御ルーチンは、ハイブリッドECU39の電源オン期間中に所定周期で繰り返し実行される。本ルーチンが起動されると、まず、ステップ101で、走行予定経路の予測が困難か否かを判定する。この場合、車両の目的地情報が得られず且つ進行方向の経路分岐数が所定値(例えば1又は2)以上の場合に、走行予定経路の予測が困難と判定する。
この後、ステップ104に進み、実際のSOCが所定値(例えば許容下限値又はそれよりも少し高い値)以下か否かを判定する。
図5に示すSOC予測及び放電量算出ルーチンは、前記図4のメイン制御ルーチンのステップ110で実行されるサブルーチンであり、特許請求の範囲でいうSOC予測部、放電制御部、修正部としての役割を果たす。
このステップ206で、バッテリ20が飽和状態にならない(つまり予測SOCが上限値に到達しない)と判定された場合には、ステップ207に進み、燃費最大化充放電量設定(図4のステップ113と同じ処理)を行う。
Claims (7)
- 車両の動力源となるエンジン(11)及びモータジェネレータ(12,13)と、該モータジェネレータと電力を授受するバッテリ(20)とを備え、前記車両を制動する際に前記モータジェネレータで回生発電した電力(以下「回生電力」という)を前記バッテリに充電する車両の制御装置において、
前記車両の走行予定経路における道路勾配及び車速の予測結果に基づいて前記走行予定経路における前記バッテリの残容量を表すSOCを予測するSOC予測部(39)と、
前記SOC予測部で予測したSOC(以下「予測SOC」という)に基づいて前記バッテリが前記回生電力を充電できない飽和状態になると判定した場合に、前記予測SOCに基づいて前記バッテリが前記飽和状態にならないように予め前記バッテリの放電量を増加させる放電増加制御を実行する放電制御部(39)と、
前記放電増加制御の開始後に、前記予測SOCの挙動が実際のSOCの挙動に対してずれている(以下「予測SOCの挙動がずれている」という)か又は前記予測SOCの挙動が前記実際のSOCの挙動に対してずれると予想される車両制御又は環境変化(以下「SOCずれ要因」という)が発生したか否かを判定する判定部(39)と、
前記判定部で前記予測SOCの挙動がずれていると判定された場合又は前記SOCずれ要因が発生したと判定された場合に、前記走行予定経路におけるSOCの予測を再度実施して前記放電増加制御を修正する修正部(39)とを備え、
前記判定部は、前記SOCずれ要因として、走行経路の変更、補機の作動状態の変化、風速の変化、風向の変化、路面状態の変化のうちの少なくとも一つが発生したか否かを判定する、車両の制御装置。 - 車両の動力源となるエンジン(11)及びモータジェネレータ(12,13)と、該モータジェネレータと電力を授受するバッテリ(20)とを備え、前記車両を制動する際に前記モータジェネレータで回生発電した電力(以下「回生電力」という)を前記バッテリに充電する車両の制御装置において、
前記車両の走行予定経路における道路勾配及び車速の予測結果に基づいて前記走行予定経路における前記バッテリの残容量を表すSOCを予測するSOC予測部(39)と、
前記SOC予測部で予測したSOC(以下「予測SOC」という)に基づいて前記バッテリが前記回生電力を充電できない飽和状態になると判定した場合に、前記予測SOCに基づいて前記バッテリが前記飽和状態にならないように予め前記バッテリの放電量を増加させる放電増加制御を実行する放電制御部(39)と、
前記放電増加制御の開始後に、前記予測SOCの挙動が実際のSOCの挙動に対してずれている(以下「予測SOCの挙動がずれている」という)か又は前記予測SOCの挙動が前記実際のSOCの挙動に対してずれると予想される車両制御又は環境変化(以下「SOCずれ要因」という)が発生したか否かを判定する判定部(39)と、
前記判定部で前記予測SOCの挙動がずれていると判定された場合又は前記SOCずれ要因が発生したと判定された場合に、前記走行予定経路におけるSOCの予測を再度実施して前記放電増加制御を修正する修正部(39)と、
前記実際のSOCが所定値以下になった場合に、前記バッテリの放電を禁止して前記エンジンの動力で前記モータジェネレータを回転駆動して前記モータジェネレータで発電するSOC低下抑制部(39)と
を備えている車両の制御装置。 - 前記SOC低下抑制部は、前記モータジェネレータの発電電力を空調用の電動コンプレッサ(29)を含む補機の消費電力の総和とする請求項2に記載の車両の制御装置。
- 車両の動力源となるエンジン(11)及びモータジェネレータ(12,13)と、該モータジェネレータと電力を授受するバッテリ(20)とを備え、前記車両を制動する際に前記モータジェネレータで回生発電した電力(以下「回生電力」という)を前記バッテリに充電する車両の制御装置において、
前記車両の走行予定経路における道路勾配及び車速の予測結果に基づいて前記走行予定経路における前記バッテリの残容量を表すSOCを予測するSOC予測部(39)と、
前記SOC予測部で予測したSOC(以下「予測SOC」という)に基づいて前記バッテリが前記回生電力を充電できない飽和状態になると判定した場合に、前記予測SOCに基づいて前記バッテリが前記飽和状態にならないように予め前記バッテリの放電量を増加させる放電増加制御を実行する放電制御部(39)と、
前記放電増加制御の開始後に、前記予測SOCの挙動が実際のSOCの挙動に対してずれている(以下「予測SOCの挙動がずれている」という)か又は前記予測SOCの挙動が前記実際のSOCの挙動に対してずれると予想される車両制御又は環境変化(以下「SOCずれ要因」という)が発生したか否かを判定する判定部(39)と、
前記判定部で前記予測SOCの挙動がずれていると判定された場合又は前記SOCずれ要因が発生したと判定された場合に、前記走行予定経路におけるSOCの予測を再度実施して前記放電増加制御を修正する修正部(39)と、
前記走行予定経路の予測が困難な場合に、前記放電増加制御を禁止する禁止部(39)と
を備えている車両の制御装置。 - 前記禁止部は、前記車両の目的地情報が得られず且つ進行方向の経路分岐数が所定値以上の場合に、前記走行予定経路の予測が困難と判定する請求項4に記載の車両の制御装置。
- 車両の動力源となるエンジン(11)及びモータジェネレータ(12,13)と、該モータジェネレータと電力を授受するバッテリ(20)とを備え、前記車両を制動する際に前記モータジェネレータで回生発電した電力(以下「回生電力」という)を前記バッテリに充電する車両の制御装置において、
前記車両の走行予定経路における道路勾配及び車速の予測結果に基づいて前記走行予定経路における前記バッテリの残容量を表すSOCを予測するSOC予測部(39)と、
前記SOC予測部で予測したSOC(以下「予測SOC」という)に基づいて前記バッテリが前記回生電力を充電できない飽和状態になると判定した場合に、前記予測SOCに基づいて前記バッテリが前記飽和状態にならないように予め前記バッテリの放電量を増加させる放電増加制御を実行する放電制御部(39)と、
前記放電増加制御の開始後に、前記予測SOCの挙動が実際のSOCの挙動に対してずれている(以下「予測SOCの挙動がずれている」という)か又は前記予測SOCの挙動が前記実際のSOCの挙動に対してずれると予想される車両制御又は環境変化(以下「SOCずれ要因」という)が発生したか否かを判定する判定部(39)と、
前記判定部で前記予測SOCの挙動がずれていると判定された場合又は前記SOCずれ要因が発生したと判定された場合に、前記走行予定経路におけるSOCの予測を再度実施して前記放電増加制御を修正する修正部(39)と、
前記バッテリの劣化状態が所定以上の場合に、前記放電増加制御を禁止する禁止部(39)と
を備えている車両の制御装置。 - 車両の動力源となるエンジン(11)及びモータジェネレータ(12,13)と、該モータジェネレータと電力を授受するバッテリ(20)とを備え、前記車両を制動する際に前記モータジェネレータで回生発電した電力(以下「回生電力」という)を前記バッテリに充電する車両の制御装置において、
前記車両の走行予定経路における道路勾配及び車速の予測結果に基づいて前記走行予定経路における前記バッテリの残容量を表すSOCを予測するSOC予測部(39)と、
前記SOC予測部で予測したSOC(以下「予測SOC」という)に基づいて前記バッテリが前記回生電力を充電できない飽和状態になると判定した場合に、前記予測SOCに基づいて前記バッテリが前記飽和状態にならないように予め前記バッテリの放電量を増加させる放電増加制御を実行する放電制御部(39)と、
前記放電増加制御の開始後に、前記予測SOCの挙動が実際のSOCの挙動に対してずれている(以下「予測SOCの挙動がずれている」という)か又は前記予測SOCの挙動が前記実際のSOCの挙動に対してずれると予想される車両制御又は環境変化(以下「SOCずれ要因」という)が発生したか否かを判定する判定部(39)と、
前記判定部で前記予測SOCの挙動がずれていると判定された場合又は前記SOCずれ要因が発生したと判定された場合に、前記走行予定経路におけるSOCの予測を再度実施して前記放電増加制御を修正する修正部(39)とを備え、
前記放電制御部は、
前記放電増加制御の際に、前記エンジンの動力と前記モータジェネレータの動力の両方で前記車両を走行させるアシスト走行により前記バッテリの放電を行うアシスト放電と、前記モータジェネレータの動力のみで前記車両を走行させるEV走行により前記バッテリの放電を行うEV放電のうちの少なくとも一方で、前記バッテリの放電量を増加させ、
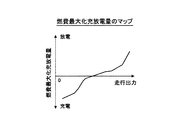
前記車両の走行出力が大きいほど前記アシスト放電による前記バッテリの放電電力を大きくし、前記車両の走行出力が小さいほど前記アシスト放電による前記バッテリの放電電力を小さくする、車両の制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015218983A JP6406215B2 (ja) | 2015-11-06 | 2015-11-06 | 車両の制御装置 |
| DE112016005098.4T DE112016005098T5 (de) | 2015-11-06 | 2016-10-06 | Steuerungsvorrichtung für ein fahrzeug |
| CN201680064401.0A CN108349486B (zh) | 2015-11-06 | 2016-10-06 | 车辆控制装置 |
| US15/765,158 US10946764B2 (en) | 2015-11-06 | 2016-10-06 | Controller for vehicle |
| PCT/JP2016/079720 WO2017077808A1 (ja) | 2015-11-06 | 2016-10-06 | 車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015218983A JP6406215B2 (ja) | 2015-11-06 | 2015-11-06 | 車両の制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017087915A JP2017087915A (ja) | 2017-05-25 |
| JP2017087915A5 JP2017087915A5 (ja) | 2017-10-26 |
| JP6406215B2 true JP6406215B2 (ja) | 2018-10-17 |
Family
ID=58662393
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015218983A Active JP6406215B2 (ja) | 2015-11-06 | 2015-11-06 | 車両の制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10946764B2 (ja) |
| JP (1) | JP6406215B2 (ja) |
| CN (1) | CN108349486B (ja) |
| DE (1) | DE112016005098T5 (ja) |
| WO (1) | WO2017077808A1 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015223588A1 (de) * | 2015-11-27 | 2017-06-01 | Bayerische Motoren Werke Aktiengesellschaft | Steuersystem mit mindestens einer elektronischen Steuereinheit zur Steuerung eines Verbrennungsmotors in einem Hybridfahrzeug |
| US10286899B2 (en) * | 2016-11-16 | 2019-05-14 | Ford Global Technologies, Llc | Operation of power electronics during battery communication loss |
| JP6620126B2 (ja) * | 2017-06-16 | 2019-12-11 | 本田技研工業株式会社 | ハイブリッド車両 |
| KR102443338B1 (ko) * | 2017-09-12 | 2022-09-15 | 현대자동차주식회사 | 배터리 충전 제어방법 및 시스템 |
| JP7013826B2 (ja) * | 2017-12-05 | 2022-02-01 | トヨタ自動車株式会社 | ハイブリッド自動車およびこれに搭載される制御装置 |
| JP7006311B2 (ja) | 2018-01-29 | 2022-01-24 | トヨタ自動車株式会社 | 電動車両及び電動車両の制御方法 |
| KR20200054512A (ko) * | 2018-11-12 | 2020-05-20 | 현대자동차주식회사 | 친환경 차량의 제동 제어 시스템 및 방법 |
| JP7119941B2 (ja) * | 2018-11-22 | 2022-08-17 | トヨタ自動車株式会社 | 車両の制御システム |
| JP7267814B2 (ja) * | 2019-04-03 | 2023-05-02 | 三菱重工業株式会社 | 計画装置及び計画方法 |
| JP7238750B2 (ja) | 2019-12-11 | 2023-03-14 | トヨタ自動車株式会社 | 走行制御装置、方法、プログラムおよび車両 |
| CN111497821B (zh) * | 2020-04-08 | 2022-03-25 | 北京汽车股份有限公司 | 混动车辆的能量管理方法 |
| CN113942514B (zh) * | 2020-07-16 | 2023-04-14 | 上海汽车集团股份有限公司 | 能耗优化方法,装置及存储介质 |
| CN112572404B (zh) * | 2020-12-24 | 2021-11-30 | 吉林大学 | 基于前方道路信息的重型商用车混合动力能量管理方法 |
| US11708007B2 (en) * | 2021-08-02 | 2023-07-25 | Ford Global Technologies, Llc | Control systems and methods for modifying a battery state of charge signal |
| DE102022205065A1 (de) | 2022-05-20 | 2023-11-23 | Psa Automobiles Sa | Hybridantrieb für ein Kraftfahrzeug und Verfahren zum Betreiben desselben |
| US20240013591A1 (en) * | 2022-07-06 | 2024-01-11 | International Engine Intellectual Property Company, Llc | Intelligent charge limit for high voltage batteries |
| CN115648344B (zh) * | 2022-12-28 | 2023-03-21 | 成都普什信息自动化有限公司 | 一种rfid标签结构的模切方法及系统 |
| CN116101255B (zh) * | 2023-02-10 | 2024-03-08 | 广州汽车集团股份有限公司 | 发动机的启停控制方法及装置、设备、介质 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3904388B2 (ja) | 2000-12-04 | 2007-04-11 | 松下電器産業株式会社 | ハイブリッド自動車の制御装置 |
| JP2007050888A (ja) * | 2006-09-25 | 2007-03-01 | Aisin Aw Co Ltd | ハイブリッド車両の駆動制御システム |
| JP4442646B2 (ja) * | 2007-06-20 | 2010-03-31 | 株式会社デンソー | 車両用発電制御装置及び制御システム |
| JP4793335B2 (ja) | 2007-06-20 | 2011-10-12 | 株式会社デンソー | 充放電管理装置および充放電管理装置用のプログラム |
| JP2009274610A (ja) * | 2008-05-15 | 2009-11-26 | Honda Motor Co Ltd | ハイブリッド車の制御装置 |
| JP2010125868A (ja) * | 2008-11-25 | 2010-06-10 | Denso Corp | 充放電計画装置 |
| JP5402882B2 (ja) * | 2010-08-30 | 2014-01-29 | 株式会社デンソー | 車両用充放電管理システム |
| EP2740643B1 (en) * | 2011-08-03 | 2017-09-27 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle and method for controlling same |
| CN102765388B (zh) * | 2012-07-03 | 2014-09-10 | 清华大学 | 一种基于多信息融合的整车控制方法 |
| US10703219B2 (en) * | 2013-10-04 | 2020-07-07 | Ford Global Technologies, Llc | Vehicle battery charge setpoint control |
| JP2015218983A (ja) | 2014-05-20 | 2015-12-07 | 積水化学工業株式会社 | 採熱システムの施工方法 |
| CN104260724B (zh) * | 2014-09-22 | 2017-02-15 | 李治良 | 一种车辆智能预测控制系统及其方法 |
-
2015
- 2015-11-06 JP JP2015218983A patent/JP6406215B2/ja active Active
-
2016
- 2016-10-06 US US15/765,158 patent/US10946764B2/en active Active
- 2016-10-06 DE DE112016005098.4T patent/DE112016005098T5/de active Granted
- 2016-10-06 CN CN201680064401.0A patent/CN108349486B/zh active Active
- 2016-10-06 WO PCT/JP2016/079720 patent/WO2017077808A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017077808A1 (ja) | 2017-05-11 |
| DE112016005098T5 (de) | 2018-08-02 |
| US20180273021A1 (en) | 2018-09-27 |
| CN108349486A (zh) | 2018-07-31 |
| JP2017087915A (ja) | 2017-05-25 |
| CN108349486B (zh) | 2021-11-30 |
| US10946764B2 (en) | 2021-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6406215B2 (ja) | 車両の制御装置 | |
| JP6436071B2 (ja) | 車両の制御装置 | |
| JP6507625B2 (ja) | ハイブリッド車の制御装置 | |
| KR100906908B1 (ko) | 하이브리드 전기 차량의 배터리 충전량 제어 방법 | |
| US10381695B2 (en) | Cooling system for secondary battery | |
| JP6056789B2 (ja) | 電気自動車の回生制動制御装置 | |
| KR100878969B1 (ko) | 하이브리드 전기 차량의 아이들 충전시 발전 제어 방법 | |
| JP5510116B2 (ja) | ハイブリッド車の回生制御装置 | |
| JP6089887B2 (ja) | ハイブリッド車の制御装置 | |
| JP6264258B2 (ja) | 車両の制御装置 | |
| JP6136474B2 (ja) | ハイブリッド車の制御装置 | |
| JP2012240566A (ja) | ハイブリッド車両の電気走行制御装置 | |
| WO2017135307A1 (ja) | 車両の空調装置 | |
| JP2011116223A (ja) | ハイブリッド電気自動車の制御装置 | |
| JP4165500B2 (ja) | 車両の制御装置および車両 | |
| JP2016120740A (ja) | ハイブリッド車両の制御装置 | |
| JP6032192B2 (ja) | ハイブリッド車の制御装置 | |
| JP5699841B2 (ja) | ハイブリッド自動車 | |
| JP2009196489A (ja) | 車両の動力制御装置 | |
| JP6070531B2 (ja) | ハイブリッド車の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170913 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180612 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180723 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180821 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180903 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6406215 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |