JP6375813B2 - トラクター - Google Patents
トラクター Download PDFInfo
- Publication number
- JP6375813B2 JP6375813B2 JP2014189835A JP2014189835A JP6375813B2 JP 6375813 B2 JP6375813 B2 JP 6375813B2 JP 2014189835 A JP2014189835 A JP 2014189835A JP 2014189835 A JP2014189835 A JP 2014189835A JP 6375813 B2 JP6375813 B2 JP 6375813B2
- Authority
- JP
- Japan
- Prior art keywords
- link mechanism
- fixing member
- pedal
- plate
- hst
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000002441 reversible effect Effects 0.000 claims description 59
- 230000005540 biological transmission Effects 0.000 claims description 25
- 230000000994 depressogenic effect Effects 0.000 claims description 9
- 230000007935 neutral effect Effects 0.000 description 18
- 230000001133 acceleration Effects 0.000 description 7
- 230000000881 depressing effect Effects 0.000 description 5
- 238000003466 welding Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
Images



Landscapes
- Gear-Shifting Mechanisms (AREA)
- Arrangement Or Mounting Of Control Devices For Change-Speed Gearing (AREA)
- Motor Power Transmission Devices (AREA)
Description
前記トランスミッションケースの前側に設けられた、HSTを収納するHSTケースと、
前記HSTのHSTトラニオン軸と連結され、前記ステップフロアの左側および右側の内の一方の側に設けられた前後進ペダルと、
前記前後進ペダルの揺動に応じて回動し、前記トランスミッションケースを左右方向に貫通している前後進ペダル回動軸と、
前記前後進ペダル回動軸の、前記ステップフロアの左側および右側の内の他方の側に連結されたリンク機構と、
前記リンク機構の位置を選択的に固定する接続部を有するリンク機構固定部材と、
作業者の指示に応じて前記リンク機構固定部材の前記接続部を移動させることによって前記リンク機構接続を行わせるリンク機構固定部材操作レバーと、
ブレーキペダルと、
前記リンク機構固定部材が前記リンク機構に当接している場合に、前記ブレーキペダルの踏み込みが行われると、前記リンク機構固定部材を前記リンク機構から離れる方向に移動させるリンク機構接続解除機構と、
を備え、
前記リンク機構固定部材操作レバーの操作により、前記リンク機構固定部材が前記リンク機構に当接することによって前記HSTトラニオン軸の回動を規制する構成とし、
前記リンク機構接続解除機構は、前記ブレーキペダルの踏み込みが行われると、前記リンク機構固定部材に当接することによって、前記リンク機構固定部材を前記リンク機構から離れる方向に移動させるリンク機構接続解除プレートを備え、
前記ブレーキペダルは、左側の車輪のブレーキに対応した左ブレーキペダルと、右側の車輪のブレーキに対応した右ブレーキペダルと、を備え、
前記リンク機構接続解除プレートは、前記左ブレーキペダルに対応する第一プレートと、前記右ブレーキペダルに対応する第二プレートと、を備えることを特徴とするトラクターである。
これにより、リンク機構接続解除プレートは、左ブレーキペダルに対応する第一プレートと、右ブレーキペダルに対応する第二プレートと、を備えるので、HSTの制御をより簡素な機構を利用して行うことが可能であるのみならず、オートクルーズ機能の解除をより簡単な操作で行うことが可能である。
第2の本発明は、前記ブレーキペダルと、前記リンク機構固定部材と、前記リンク機構固定部材操作レバーと、前記リンク機構接続解除機構とは、前記ステップフロアの前記他方の側に設けられていることを特徴とする、第1の本発明のトラクターである。
これにより、ブレーキペダルと、リンク機構固定部材と、リンク機構固定部材操作レバーと、リンク機構接続解除機構とは、ステップフロアの他方の側に設けられているので、コンパクトな機体レイアウトを実現することが可能である。
第3の本発明は、前記リンク機構固定部材は、前記リンク機構接続解除プレートによって当接される被当接部を備え、
前記被当接部は、前記第一プレートによって当接される第一被当接部と、前記第二プレートによって当接される第二被当接部と、を備えることを特徴とする、第2の本発明のトラクターである。
これにより、被当接部は、第一プレートによって当接される第一被当接部と、第二プレートによって当接される第二被当接部と、を備えるので、オートクルーズ機能の解除をより確実に行うことが可能である。
本発明に関連する第1の発明は、ステップフロアの下側に設けられたトランスミッションケースと、
前記トランスミッションケースの前側に設けられた、HSTを収納するHSTケースと、
前記HSTのHSTトラニオン軸と連結され、前記ステップフロアの左側および右側の内の一方の側に設けられた前後進ペダルと、
を備えることを特徴とするトラクターである。
前記HSTトラニオンアームと、前記前後進ペダルと、を連結する、前後方向の連結軸と、
を備え、
前記連結軸は、前記HSTケースの後部から後方に突出して、前記トランスミッションケースの側方を通過していることを特徴とする、本発明に関連する第1の発明のトラクターである。
前記前後進ペダル回動軸の、前記ステップフロアの左側および右側の内の他方の側の端部に連結されたリンク機構と、
前記リンク機構の上端部と選択的に着脱自在なリンク機構接続を行うことによって前記リンク機構の前記上端部の位置を選択的に固定する接続部を有するリンク機構固定部材と、
作業者の指示に応じて前記リンク機構固定部材の前記接続部を移動させることによって前記リンク機構接続を行わせるリンク機構固定部材操作レバーと、
を備え、
前記前後進ペダル回動軸の回動角度は、前記リンク機構の前記上端部と、前記リンク機構固定部材の前記接続部と、の選択的な前記リンク機構接続によって、選択されることを特徴とする、本発明に関連する第2の発明のトラクターである。
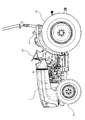
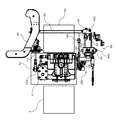
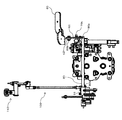
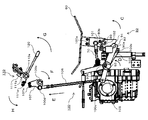
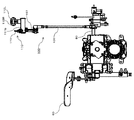
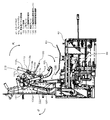
2 エンジン
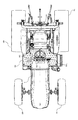
3L、3R 前輪
4L、4R 後輪
10 HSTケース
11 HST
12 HSTトラニオン軸
13 HSTトラニオンアーム
20 トランスミッションケ−ス
31 運転席
32 ステアリングハンドル
33 操作コラムカバー
34 ダッシュパネル
35 ホースカバー
40 ステップフロア
50L、50R ブレーキペダル
51 ブレーキペダル連結器
52L、52R リターンスプリング
60 前後進ペダル
61 ペダル基部
62 ペダル踏込部
70 連結軸
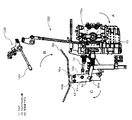
80 前後進ペダル回動軸
90 中立姿勢調整機構
91 ハブ
92 中立プレート
93 調整つまみ部材
100 リンク機構
101 アーム
102 ロッド
103 クルーズプレート
104 回動アーム部材
105 プレート
106 ロッド
107 上端プレート
110 リンク機構固定部材
111 接続プレート
112L、112R リンク機構接続解除ベアリング
113 プレート
120 リンク機構固定部材操作レバー
121 リターンスプリング
130 リンク機構接続解除機構
131L、131R リンク機構接続解除プレート
Claims (3)
- ステップフロアの下側に設けられたトランスミッションケースと、
前記トランスミッションケースの前側に設けられた、HSTを収納するHSTケースと、
前記HSTのHSTトラニオン軸と連結され、前記ステップフロアの左側および右側の内の一方の側に設けられた前後進ペダルと、
前記前後進ペダルの揺動に応じて回動し、前記トランスミッションケースを左右方向に貫通している前後進ペダル回動軸と、
前記前後進ペダル回動軸の、前記ステップフロアの左側および右側の内の他方の側に連結されたリンク機構と、
前記リンク機構の位置を選択的に固定する接続部を有するリンク機構固定部材と、
作業者の指示に応じて前記リンク機構固定部材の前記接続部を移動させることによって前記リンク機構接続を行わせるリンク機構固定部材操作レバーと、
ブレーキペダルと、
前記リンク機構固定部材が前記リンク機構に当接している場合に、前記ブレーキペダルの踏み込みが行われると、前記リンク機構固定部材を前記リンク機構から離れる方向に移動させるリンク機構接続解除機構と、
を備え、
前記リンク機構固定部材操作レバーの操作により、前記リンク機構固定部材が前記リンク機構に当接することによって前記HSTトラニオン軸の回動を規制する構成とし、
前記リンク機構接続解除機構は、前記ブレーキペダルの踏み込みが行われると、前記リンク機構固定部材に当接することによって、前記リンク機構固定部材を前記リンク機構から離れる方向に移動させるリンク機構接続解除プレートを備え、
前記ブレーキペダルは、左側の車輪のブレーキに対応した左ブレーキペダルと、右側の車輪のブレーキに対応した右ブレーキペダルと、を備え、
前記リンク機構接続解除プレートは、前記左ブレーキペダルに対応する第一プレートと、前記右ブレーキペダルに対応する第二プレートと、を備えることを特徴とするトラクター。 - 前記ブレーキペダルと、前記リンク機構固定部材と、前記リンク機構固定部材操作レバーと、前記リンク機構接続解除機構とは、前記ステップフロアの前記他方の側に設けられていることを特徴とする、請求項1に記載のトラクター。
- 前記リンク機構固定部材は、前記リンク機構接続解除プレートによって当接される被当接部を備え、
前記被当接部は、前記第一プレートによって当接される第一被当接部と、前記第二プレートによって当接される第二被当接部と、を備えることを特徴とする、請求項2に記載のトラクター。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014189835A JP6375813B2 (ja) | 2014-09-18 | 2014-09-18 | トラクター |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014189835A JP6375813B2 (ja) | 2014-09-18 | 2014-09-18 | トラクター |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016060363A JP2016060363A (ja) | 2016-04-25 |
| JP6375813B2 true JP6375813B2 (ja) | 2018-08-22 |
Family
ID=55796872
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014189835A Active JP6375813B2 (ja) | 2014-09-18 | 2014-09-18 | トラクター |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6375813B2 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6138831Y2 (ja) * | 1979-07-24 | 1986-11-08 | ||
| JPS5657124A (en) * | 1979-10-12 | 1981-05-19 | Kubota Ltd | Speed change operating device for running of working vehicle |
| JPH1191391A (ja) * | 1997-09-18 | 1999-04-06 | Kubota Corp | 作業車 |
| JP4784090B2 (ja) * | 2004-12-22 | 2011-09-28 | 井関農機株式会社 | 作業車両 |
| JP2007137323A (ja) * | 2005-11-21 | 2007-06-07 | Yanmar Co Ltd | 作業車両 |
-
2014
- 2014-09-18 JP JP2014189835A patent/JP6375813B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016060363A (ja) | 2016-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4866307B2 (ja) | 作業車 | |
| JP6499111B2 (ja) | 作業車両 | |
| JP2648262B2 (ja) | 作業車の変速操作構造 | |
| JP6398446B2 (ja) | トラクター | |
| JP5959461B2 (ja) | 作業車の車速操作装置 | |
| JP6375813B2 (ja) | トラクター | |
| JP6566101B2 (ja) | トラクター | |
| JP5069669B2 (ja) | 作業車 | |
| JP4917854B2 (ja) | 作業車両 | |
| JP5356348B2 (ja) | 走行車両の前後進切換操作装置 | |
| JP2013067231A (ja) | トラクタの操作装置 | |
| JP2010213663A (ja) | 田植機 | |
| JP2013067239A (ja) | 作業車の速度維持解除構造 | |
| JP5063569B2 (ja) | 作業車両 | |
| JP7809045B2 (ja) | 作業車 | |
| JP5474377B2 (ja) | 作業車両 | |
| JP2008006902A (ja) | 操作リンク構造 | |
| JP2015123760A (ja) | 作業車 | |
| JP2018131156A (ja) | 作業車両 | |
| JP2024063566A (ja) | 作業車 | |
| JP2017043248A (ja) | 作業車両 | |
| JP4797382B2 (ja) | 作業車両の変速調節装置 | |
| JP6710960B2 (ja) | 作業車両 | |
| JP2014082980A (ja) | 乗用型走行車両における地上操作具 | |
| JP2018034680A (ja) | 作業車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170421 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180116 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180313 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180626 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180709 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6375813 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |