JP6213334B2 - ハイブリッド車両 - Google Patents
ハイブリッド車両 Download PDFInfo
- Publication number
- JP6213334B2 JP6213334B2 JP2014063660A JP2014063660A JP6213334B2 JP 6213334 B2 JP6213334 B2 JP 6213334B2 JP 2014063660 A JP2014063660 A JP 2014063660A JP 2014063660 A JP2014063660 A JP 2014063660A JP 6213334 B2 JP6213334 B2 JP 6213334B2
- Authority
- JP
- Japan
- Prior art keywords
- characteristic
- control
- warm
- operating
- internal combustion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000003054 catalyst Substances 0.000 claims description 167
- 238000002485 combustion reaction Methods 0.000 claims description 85
- 238000000746 purification Methods 0.000 claims description 48
- 230000008859 change Effects 0.000 claims description 21
- 238000011144 upstream manufacturing Methods 0.000 claims description 8
- 238000010792 warming Methods 0.000 claims description 5
- 230000004044 response Effects 0.000 claims description 3
- 239000000446 fuel Substances 0.000 description 53
- 239000007789 gas Substances 0.000 description 31
- 238000010586 diagram Methods 0.000 description 24
- 238000000034 method Methods 0.000 description 17
- 230000008569 process Effects 0.000 description 16
- 238000003860 storage Methods 0.000 description 16
- 239000000203 mixture Substances 0.000 description 12
- 238000006073 displacement reaction Methods 0.000 description 11
- 230000007423 decrease Effects 0.000 description 7
- 230000006866 deterioration Effects 0.000 description 7
- 230000002093 peripheral effect Effects 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 6
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 230000002542 deteriorative effect Effects 0.000 description 5
- 238000002347 injection Methods 0.000 description 5
- 239000007924 injection Substances 0.000 description 5
- 239000000498 cooling water Substances 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 4
- 230000006872 improvement Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000005086 pumping Methods 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 239000000567 combustion gas Substances 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052987 metal hydride Inorganic materials 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- -1 nickel metal hydride Chemical class 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
- B60W20/16—Control strategies specially adapted for achieving a particular effect for reducing engine exhaust emissions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/192—Mitigating problems related to power-up or power-down of the driveline, e.g. start-up of a cold engine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D13/00—Controlling the engine output power by varying inlet or exhaust valve operating characteristics, e.g. timing
- F02D13/02—Controlling the engine output power by varying inlet or exhaust valve operating characteristics, e.g. timing during engine operation
- F02D13/0223—Variable control of the intake valves only
- F02D13/0226—Variable control of the intake valves only changing valve lift or valve lift and timing
- F02D13/023—Variable control of the intake valves only changing valve lift or valve lift and timing the change of valve timing is caused by the change in valve lift, i.e. both valve lift and timing are functionally related
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D13/00—Controlling the engine output power by varying inlet or exhaust valve operating characteristics, e.g. timing
- F02D13/02—Controlling the engine output power by varying inlet or exhaust valve operating characteristics, e.g. timing during engine operation
- F02D13/0269—Controlling the valves to perform a Miller-Atkinson cycle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/02—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving vehicles; peculiar to engines driving variable pitch propellers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/021—Introducing corrections for particular conditions exterior to the engine
- F02D41/0235—Introducing corrections for particular conditions exterior to the engine in relation with the state of the exhaust gas treating apparatus
- F02D41/024—Introducing corrections for particular conditions exterior to the engine in relation with the state of the exhaust gas treating apparatus to increase temperature of the exhaust gas treating apparatus
- F02D41/0245—Introducing corrections for particular conditions exterior to the engine in relation with the state of the exhaust gas treating apparatus to increase temperature of the exhaust gas treating apparatus by increasing temperature of the exhaust gas leaving the engine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/46—Series type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0676—Engine temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/068—Engine exhaust temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2530/00—Input parameters relating to vehicle conditions or values, not covered by groups B60W2510/00 or B60W2520/00
- B60W2530/12—Catalyst or filter state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0677—Engine power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0694—Engine exhaust temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/43—Control of engines
- B60Y2300/436—Control of engine ignition
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/43—Control of engines
- B60Y2300/437—Control of engine valves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/47—Engine emissions
- B60Y2300/474—Catalyst warm up
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/302—Temperature sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D13/00—Controlling the engine output power by varying inlet or exhaust valve operating characteristics, e.g. timing
- F02D13/02—Controlling the engine output power by varying inlet or exhaust valve operating characteristics, e.g. timing during engine operation
- F02D2013/0292—Controlling the engine output power by varying inlet or exhaust valve operating characteristics, e.g. timing during engine operation in the start-up phase, e.g. for warming-up cold engine or catalyst
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0002—Controlling intake air
- F02D2041/001—Controlling intake air for engines with variable valve actuation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/905—Combustion engine
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/93—Conjoint control of different elements
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Hybrid Electric Vehicles (AREA)
- Electrical Control Of Ignition Timing (AREA)
- Exhaust Gas After Treatment (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Description
(ハイブリッド車両の全体構成)
図1は、本発明の実施の形態1に従うハイブリッド車両の全体構成を説明するためのブロック図である。
ファ等(いずれも図示せず)を含むECU(Electronic Control Unit)を含んで構成
される。制御装置200は、各種センサからの信号(アクセル開度ACCや車速VSS等)の入力や各機器への制御信号の出力を行なうとともに、ハイブリッド車両1における各機器の制御を行なう。主要なものとして、制御装置200は、ハイブリッド車両1の走行制御や、排気浄化装置の触媒の暖機を行なうための触媒暖機制御、走行制御および触媒暖機制御に応じた可変動弁装置の制御等を実行する。制御装置200の動作については、後ほど説明する。
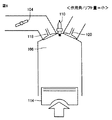
次に、可変動弁機構を有するエンジンの構成について説明する。
図2を参照して、エンジン100への吸入空気量は、スロットルモータ312により駆動されるスロットルバルブ104により調整される。インジェクタ108は、吸気ポートに燃料を噴射する。吸気ポートにおいて、燃料と空気とが混合される。混合気は、吸気バルブ118が開くことによって、シリンダ106内へ導入される。なお、インジェクタ108は、シリンダ106内に直接燃料を噴射する直噴インジェクタとして設けられてもよい。あるいは、インジェクタ108は、ポート噴射用と直噴用との両方が設けられてもよい。
24により駆動される。
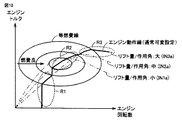
再び図1および図2を参照して、このハイブリッド車両1は、エンジン100を停止してモータジェネレータMGによる走行(EV走行)が可能である。すなわち、ハイブリッド車両1では、エンジン100は間欠運転される。たとえば、エンジン停止状態で所定のエンジン始動条件が成立すると、エンジン始動処理が実行される。代表的には、エンジン始動条件は、ハイブリッド車両1に要求される出力が所定のしきい値を超えたときに成立する。反対に、エンジン100の作動時に、ハイブリッド車両1に要求される出力が低下すると、エンジン停止条件が成立して、エンジン停止処理が実行される。
上記の実施の形態1では、VVL装置400は、吸気バルブ118の作動特性を3段階に切替可能としたが、吸気バルブ118の作動特性は、2段階に切替可能とされてもよい。
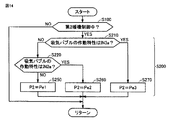
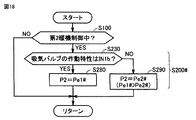
実施の形態1では、第2暖機制御中におけるエンジン出力(第2運転パワーP2)を、吸気バルブの作動特性に応じて変化させる態様で設定した。このようにすると、図15および図16で説明したように、第2暖機制御中に吸気バルブ118の作動特性が変化した場合にも、エミッションおよび燃費の悪化を防止することができる。
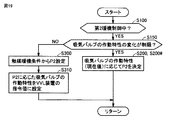
上記の実施の形態1,2においては、排気浄化装置を、前段のS/C触媒112Sと、後段のU/F触媒112Uとによって構成し(図2)、S/C触媒112Sについて、S/C触媒112Sの端面浄化率が100%に達すると、第1暖機制御から第2暖機制御に切替わるものとし、S/C触媒112Sの中央浄化率が100%に達すると、触媒暖機制御(第2暖機制御)から通常制御に切替わるものとした。
の場合、第1暖機制御では、エンジン100のトルクが第1のトルクとなるように第1運転ポイントが設定され、第2暖機制御では、エンジン100のトルクが第2のトルクとなるように第2運転ポイントが設定されるように、触媒暖機制御におけるエンジン出力が制御される。
Claims (7)
- 車両駆動力を発生する電動機と、
吸気バルブの作動特性としてリフト量および作用角の少なくとも一方を制御するための可変動弁装置を有する内燃機関と、
触媒を用いて前記内燃機関の排気を浄化する排気浄化装置と、
前記排気浄化装置の触媒の暖機を行なう触媒暖機制御を実行する制御装置とを備え、
前記触媒暖機制御は、
前記内燃機関を第1の運転ポイントで運転する第1の暖機制御と、
前記第1の暖機制御の実行後、走行に要求される駆動力に拘わらず、前記第1の運転ポイントよりも前記内燃機関の出力が大きい第2の運転ポイントで前記内燃機関を運転する第2の暖機制御とを含み、
前記制御装置は、前記第1の暖機制御の実行中は、前記第2の暖機制御の実行中よりも前記内燃機関の点火時期を遅角側にして前記内燃機関を運転し、
前記第2の暖機制御の実行中において、前記内燃機関の出力および前記吸気バルブの作動特性は、前記内燃機関の出力および前記作動特性を対応付ける所定の特性関係に従って設定され、
前記可変動弁装置は、前記作動特性を、第1の特性と、前記作動特性が前記第1の特性であるときよりも前記リフト量および前記作用角の少なくとも一方が大きい第2の特性とに変更可能に構成され、
前記特性関係は、前記作動特性が前記第2の特性であるときの前記内燃機関の出力が、前記作動特性が前記第1の特性であるときの前記内燃機関の出力よりも低くなるように定められる、ハイブリッド車両。 - 車両駆動力を発生する電動機と、
吸気バルブの作動特性としてリフト量および作用角の少なくとも一方を制御するための可変動弁装置を有する内燃機関と、
触媒を用いて前記内燃機関の排気を浄化する排気浄化装置と、
前記排気浄化装置の触媒の暖機を行なう触媒暖機制御を実行する制御装置とを備え、
前記触媒暖機制御は、
前記内燃機関を第1の運転ポイントで運転する第1の暖機制御と、
前記第1の暖機制御の実行後、走行に要求される駆動力に拘わらず、前記第1の運転ポイントよりも前記内燃機関の出力が大きい第2の運転ポイントで前記内燃機関を運転する第2の暖機制御とを含み、
前記制御装置は、前記第1の暖機制御の実行中は、前記第2の暖機制御の実行中よりも前記内燃機関の点火時期を遅角側にして前記内燃機関を運転し、
前記第2の暖機制御の実行中において、前記内燃機関の出力および前記吸気バルブの作動特性は、前記内燃機関の出力および前記作動特性を対応付ける所定の特性関係に従って設定され、
前記可変動弁装置は、前記吸気バルブの作動特性を、第1の特性と、前記作動特性が前記第1の特性であるときよりも前記リフト量および前記作用角の少なくとも一方が大きい第2の特性と、前記作動特性が前記第2の特性であるときよりも前記リフト量および前記作用角の少なくとも一方が大きい第3の特性とのうちのいずれかに切替可能に構成され、 前記特性関係は、前記作動特性が前記第2の特性であるときの前記内燃機関の出力が、前記作動特性が前記第1の特性であるときの前記内燃機関の出力よりも低くなり、かつ、前記作動特性が前記第3の特性であるときの前記内燃機関の出力が、前記作動特性が前記第2の特性であるときの前記内燃機関の出力よりも低くなるように定められる、ハイブリッド車両。 - 前記可変動弁装置によって変更される前記作動特性を検出するための検出器をさらに備え、
前記第2の暖機制御の実行中において、前記吸気バルブの作動特性が変化すると、前記内燃機関の出力は、前記特性関係に従って、前記検出器によって検出された現在の前記作動特性に応じて変更される、請求項1または2に記載のハイブリッド車両。 - 前記制御装置は、前記第2の暖機制御の実行中において、前記可変動弁装置による前記作動特性の変化が制限されている状態である場合には、前記吸気バルブの現在の作動特性に応じて、前記特性関係に従って前記内燃機関の出力を設定する一方で、
前記可変動弁装置は、前記第2の暖機制御の実行中において、前記可変動弁装置による前記作動特性の変化が制限されていない場合には、前記触媒暖機制御のために設定された前記内燃機関の出力に応じて、前記特性関係に従って前記作動特性を変更する、請求項1〜3のいずれか1項に記載のハイブリッド車両。 - 前記制御装置は、前記第2の暖機制御の実行中において、可変動弁装置による前記作動特性の変化が制限されていない場合には、前記触媒の温度上昇に応じて、前記内燃機関の出力を増加させるとともに、前記作動特性を前記特性関係に従って連動して変化させる、請求項4記載のハイブリッド車両。
- 前記第1の暖機制御は、前記触媒の排気上流側の暖機を行なうものであり、
前記第2の暖機制御は、前記触媒全体の暖機を行なうものである、請求項1〜5のいずれか1項に記載のハイブリッド車両。 - 前記制御装置は、前記第1および第2の暖機制御の実行中、走行に要求される駆動力を前記電動機が出力するように前記電動機を制御する、請求項1〜5のいずれか1項に記載のハイブリッド車両。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014063660A JP6213334B2 (ja) | 2014-03-26 | 2014-03-26 | ハイブリッド車両 |
| CN201580016342.5A CN106132798B (zh) | 2014-03-26 | 2015-03-25 | 混合动力车辆、用于混合动力车辆的控制器和用于混合动力车辆的控制方法 |
| PCT/IB2015/000391 WO2015145242A2 (en) | 2014-03-26 | 2015-03-25 | Hybrid vehicle, controller for hybrid vehicle, and control method for hybrid vehicle |
| US15/128,584 US9889842B2 (en) | 2014-03-26 | 2015-03-25 | Hybrid vehicle, controller for hybrid vehicle, and control method for hybrid vehicle |
| EP15717614.0A EP3122606B1 (en) | 2014-03-26 | 2015-03-25 | Hybrid vehicle, controller for hybrid vehicle, and control method for hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014063660A JP6213334B2 (ja) | 2014-03-26 | 2014-03-26 | ハイブリッド車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015182735A JP2015182735A (ja) | 2015-10-22 |
| JP6213334B2 true JP6213334B2 (ja) | 2017-10-18 |
Family
ID=52991887
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014063660A Active JP6213334B2 (ja) | 2014-03-26 | 2014-03-26 | ハイブリッド車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9889842B2 (ja) |
| EP (1) | EP3122606B1 (ja) |
| JP (1) | JP6213334B2 (ja) |
| CN (1) | CN106132798B (ja) |
| WO (1) | WO2015145242A2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3049249B1 (fr) * | 2016-03-23 | 2019-06-14 | Renault S.A.S | Procede de controle d'un couple d'assistance electrique |
| JP6423026B2 (ja) * | 2017-02-09 | 2018-11-14 | 本田技研工業株式会社 | ハイブリッド車 |
| JP7477049B2 (ja) * | 2021-05-19 | 2024-05-01 | 日産自動車株式会社 | ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3622322B2 (ja) | 1996-03-11 | 2005-02-23 | 株式会社日立製作所 | バルブ駆動装置及びエンジン |
| JP2003286869A (ja) * | 2002-03-27 | 2003-10-10 | Toyota Motor Corp | 筒内噴射式火花点火内燃機関 |
| JP4158507B2 (ja) | 2002-12-05 | 2008-10-01 | トヨタ自動車株式会社 | 内燃機関の弁駆動システム |
| US6810844B2 (en) | 2002-12-10 | 2004-11-02 | Delphi Technologies, Inc. | Method for 3-step variable valve actuation |
| JP2005009474A (ja) * | 2003-05-26 | 2005-01-13 | Toyota Motor Corp | 動力出力装置およびその制御方法 |
| JP2005320911A (ja) * | 2004-05-10 | 2005-11-17 | Toyota Motor Corp | 動力出力装置およびこれを搭載する自動車並びにその制御方法 |
| JP2008025550A (ja) | 2006-07-25 | 2008-02-07 | Toyota Motor Corp | 可変動弁機構の制御装置 |
| JP4197038B2 (ja) * | 2007-03-27 | 2008-12-17 | トヨタ自動車株式会社 | ハイブリッド自動車およびその制御方法 |
| JP4183013B1 (ja) * | 2007-05-15 | 2008-11-19 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP5029288B2 (ja) | 2007-10-29 | 2012-09-19 | 日産自動車株式会社 | 排気浄化触媒の暖機制御装置及び暖機制御方法 |
| JP5003511B2 (ja) | 2008-01-25 | 2012-08-15 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| JP5476748B2 (ja) * | 2009-03-09 | 2014-04-23 | 日産自動車株式会社 | ハイブリッド車両 |
| CN102427981B (zh) * | 2009-05-19 | 2014-04-23 | 丰田自动车株式会社 | 混合动力车辆及其控制方法 |
| JP2011047296A (ja) * | 2009-08-26 | 2011-03-10 | Honda Motor Co Ltd | 内燃機関の制御装置 |
| JP5459144B2 (ja) * | 2010-08-17 | 2014-04-02 | トヨタ自動車株式会社 | ハイブリッド車 |
| JP2012117376A (ja) | 2010-11-29 | 2012-06-21 | Hitachi Automotive Systems Ltd | 内燃機関の動弁装置及びこの動弁装置に用いられる揺動カム |
| JP2013053610A (ja) | 2011-09-06 | 2013-03-21 | Toyota Motor Corp | 可変動弁装置 |
| JP5632882B2 (ja) * | 2012-07-09 | 2014-11-26 | 本田技研工業株式会社 | ハイブリッド車両の触媒暖機制御装置 |
| JP2015116959A (ja) | 2013-12-19 | 2015-06-25 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP5929884B2 (ja) | 2013-12-19 | 2016-06-08 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP5949806B2 (ja) * | 2014-02-25 | 2016-07-13 | トヨタ自動車株式会社 | ハイブリッド車両 |
-
2014
- 2014-03-26 JP JP2014063660A patent/JP6213334B2/ja active Active
-
2015
- 2015-03-25 WO PCT/IB2015/000391 patent/WO2015145242A2/en active Application Filing
- 2015-03-25 US US15/128,584 patent/US9889842B2/en active Active
- 2015-03-25 CN CN201580016342.5A patent/CN106132798B/zh not_active Expired - Fee Related
- 2015-03-25 EP EP15717614.0A patent/EP3122606B1/en not_active Not-in-force
Also Published As
| Publication number | Publication date |
|---|---|
| CN106132798A (zh) | 2016-11-16 |
| US9889842B2 (en) | 2018-02-13 |
| EP3122606B1 (en) | 2018-07-04 |
| CN106132798B (zh) | 2019-03-19 |
| WO2015145242A2 (en) | 2015-10-01 |
| JP2015182735A (ja) | 2015-10-22 |
| US20170120894A1 (en) | 2017-05-04 |
| EP3122606A2 (en) | 2017-02-01 |
| WO2015145242A3 (en) | 2016-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5949806B2 (ja) | ハイブリッド車両 | |
| JP4315229B2 (ja) | ハイブリッド車両 | |
| JP5929884B2 (ja) | ハイブリッド車両 | |
| JP6004106B2 (ja) | 内燃機関の制御装置 | |
| JP6040913B2 (ja) | ハイブリッド車両 | |
| US20160288784A1 (en) | Hybrid vehicle, control device for hybrid vehicle, and control method for hybrid vehicle with controller for managing the output of a battery in case of engine decompression situation | |
| JP2015067265A (ja) | ハイブリッド車両 | |
| JP2015077867A (ja) | ハイブリッド車両 | |
| KR20160067745A (ko) | 자동차 | |
| JP5939221B2 (ja) | ハイブリッド車両の制御装置およびハイブリッド車両の制御方法 | |
| JP2015116967A (ja) | ハイブリッド車両 | |
| JP5962640B2 (ja) | ハイブリッド車両 | |
| JP6213334B2 (ja) | ハイブリッド車両 | |
| JP2015116959A (ja) | ハイブリッド車両 | |
| JP6194906B2 (ja) | 車両の制御装置 | |
| JP2014077363A (ja) | ハイブリッド車両の制御装置 | |
| JP2015058827A (ja) | ハイブリッド車両およびハイブリッド車両の制御方法 | |
| JP2015150947A (ja) | ハイブリッド車両 | |
| JP2015128934A (ja) | ハイブリッド車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160209 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160913 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161109 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170418 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170711 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20170720 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170822 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170904 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6213334 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |