JP6007925B2 - 基板洗浄装置、基板洗浄方法及び記憶媒体 - Google Patents
基板洗浄装置、基板洗浄方法及び記憶媒体 Download PDFInfo
- Publication number
- JP6007925B2 JP6007925B2 JP2014014864A JP2014014864A JP6007925B2 JP 6007925 B2 JP6007925 B2 JP 6007925B2 JP 2014014864 A JP2014014864 A JP 2014014864A JP 2014014864 A JP2014014864 A JP 2014014864A JP 6007925 B2 JP6007925 B2 JP 6007925B2
- Authority
- JP
- Japan
- Prior art keywords
- nozzle
- cleaning liquid
- substrate
- gas
- cleaning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


























Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67028—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like
- H01L21/6704—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing
- H01L21/67051—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing using mainly spraying means, e.g. nozzles
Description
露光部分と未露光部分との接触角の差異が大きい基板に対して上述の洗浄を行う場合には、洗浄液ノズルのスキャン速度を遅くすることが有効であるが、装置のスループットの低下の要因になる。特に塗布、現像装置においては、市場にて1時間あたり200枚以上もの処理が要求されていることから、高いスループットを維持しながら残渣の低減を図ることのできる手法が望まれている。
基板を水平に保持する基板保持部と、
前記基板保持部を鉛直軸周りに回転させる回転機構と、
前記基板保持部に保持された基板に各々洗浄液を供給するための第1の洗浄液ノズル及び第2の洗浄液ノズルと、
前記基板保持部に保持された基板にガスを吐出する基板の中心部にガスを吐出するときに用いられる第1のガスノズルと、
前記第1のガスノズルの移動軌跡から外れる位置に設けられた第2のガスノズルと、
前記第1の洗浄液ノズル、第2の洗浄液ノズル、第1のガスノズル及び第2のガスノズルを移動させるためのノズル移動部と、
前記第1の洗浄液ノズルから洗浄液を基板の中心部に吐出するステップと、次いで前記洗浄液の吐出位置を前記基板の中心部から周縁側に移動させた後、前記第1のガスノズルからガスを当該中心部に吐出するステップと、続いて第1の洗浄液ノズル及び第1のガスノズルから夫々洗浄液及びガスの吐出を行いながら前記第1の洗浄液ノズル及び前記第1のガスノズルの各吐出位置を基板の周縁側に向けて移動させるステップと、次に前記第1の洗浄液ノズルから第2の洗浄液ノズルに洗浄液の吐出を切替えると共に、前記第1のガスノズルから第2のガスノズルにガスの吐出を切替え、第2の洗浄液ノズルからの洗浄液の吐出及び第2のガスノズルからのガスの吐出を行いながら当該第2の洗浄液ノズル及び当該第2のガスノズルの各吐出位置を基板の周縁側に向けて移動させるステップと、を実行するように制御信号を出力する制御部と、を備え、
前記第2の洗浄液ノズルは、吐出位置が第1の洗浄液ノズルの吐出位置の移動軌跡から外れる位置に設定され、
第2の洗浄液ノズル及び第2のガスノズルの各吐出位置から基板の中心部までの距離を、夫々d2及びd3とすると、第2の洗浄液ノズルから洗浄液を吐出しているときには、d3<d2であり、かつ第2の洗浄液ノズルが基板の周縁側に移動するにつれて、d2とd3との差が徐々に小さくなるように構成されていることを特徴とする。
基板を基板保持部に水平に保持する工程と、
前記基板保持部を鉛直軸周りに回転させながら、第1の洗浄液ノズルから洗浄液を基板の中心部に吐出する工程と、
次いで前記洗浄液の吐出位置を基板の周縁側に移動させた後、第1のガスノズルからガスを前記基板の中心部に吐出する工程と、
続いて第1の洗浄液ノズル及び第1のガスノズルから夫々洗浄液及びガスの吐出を行いながら前記第1の洗浄液ノズル及び前記第1のガスノズルの各吐出位置を基板の周縁側に向けて移動させる工程と、
次に前記第1の洗浄液ノズルから第2の洗浄液ノズルに洗浄液の吐出を切替えると共に、前記第1のガスノズルの移動軌跡から外れる位置において、前記第2の洗浄液ノズルと共通のノズル移動部に水平面に対して30度〜60度の範囲で傾いた状態で設けられた第2のガスノズルを用いて、前記第1のガスノズルから第2のガスノズルにガスの吐出を切替え、第2の洗浄液ノズルからの洗浄液の吐出及び第2のガスノズルからのガスの吐出を行いながら当該第2の洗浄液ノズル及び当該第2のガスノズルの各吐出位置を基板の周縁側に向けて移動させる工程と、
複数の洗浄処理の種別の中から選択された洗浄処理の種別に対応する第2のガスノズルの吐出口の高さを、基板の洗浄処理の種別と基板に対する第2のガスノズルの吐出口の高さとを対応付けたデータを記憶する記憶部の中から読み出して前記ノズル移動部を昇降させる昇降機構に出力して、第2のガスノズルの吐出口の高さを調整する工程と、を含み、
前記第2の洗浄液ノズルは、吐出位置が第1の洗浄液ノズルの吐出位置の移動軌跡から外れる位置に設定され、
前記第2の洗浄液ノズル及び第2のガスノズルの各吐出位置から基板の中心部までの距離を、夫々d2及びd3とすると、第2の洗浄液ノズルから洗浄液を吐出しているときには、d3<d2であり、かつ第2の洗浄液ノズルが基板の周縁側に移動するにつれて、d2とd3との差が徐々に小さくなることを特徴とする。
前記コンピュータプログラムは、上述の基板洗浄方法を実行するようにステップ群が組まれていることを特徴とする。
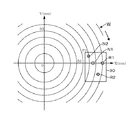
まず図6に示すように、ノズルアーム30がP0で示す位置まで移動し、第1の洗浄液ノズル41の吐出位置R1がウエハWの中心部に位置する。その後、図11に示すように、ウエハWを例えば1000rpmの回転速度で回転させながら、第1の洗浄液ノズル41から洗浄液、例えば純水を、30ml/秒の流量で例えば10秒間供給する。これによりウエハWに供給された第1の洗浄液はウエハWの回転による遠心力によりウエハWの中心部から周縁部に向かって広がり、現像液が洗浄液により洗い流される。
次いでウエハWの回転を維持しながら、第1の洗浄液ノズル41から第1の洗浄液を吐出した状態で、図7に示すようにノズルアーム30をX方向に沿って右側にP1まで移動させ、第1の窒素ガスノズル51の吐出位置N1をウエハWの中心部に位置させる。この時、第1の洗浄液ノズル41の吐出位置R1は、ウエハWの中心部からX方向右側に15mm離れて位置することになる。そして図12に示すように第1の窒素ガスノズル51から、ウエハWの中心部に向けて窒素ガスを吹き付ける。
続いてウエハWの回転を維持し、第1の洗浄液ノズル41及び第1の窒素ガスノズル51から夫々洗浄液及びガスを吐出したまま、図8に示すようにノズルアーム30をウエハWのX方向右側に15mm移動させ、P2に位置させる。即ち第1の洗浄液ノズル41の吐出位置R1がウエハWの中心部からX方向右側に30mm離れた位置に移動すると共に、第1の窒素ガスノズル51の吐出位置N1がウエハWの中心部からX方向右側に15mm離れた位置に移動し、これにより乾燥領域も第1の洗浄液ノズル41の吐出位置R1に対応する位置まで広がる。そのためステップ3では、図13に示すようにノズルアーム30の移動に伴い、第1の洗浄液ノズル41の吐出位置R1とウエハWの中心部との距離の増加するにつれて、液界面は徐々にウエハWの周縁方向に移動していく。
ノズルアーム30が位置P2まで移動した後、図9に示すように第1の洗浄液の吐出を停止して、第2の洗浄液の吐出を開始すると共に、第1の窒素ガスの吐出を停止して、第2の窒素ガスの吐出を開始する。第2の洗浄液ノズル43の吐出位置R2は、第1の洗浄液ノズル41の吐出位置R1がウエハWの中心部から30mm離れて位置しているとき、第2の洗浄液ノズル43の吐出位置R2とウエハWの中心部との距離が30mmになるように、即ちウエハWの中心部を中心とする同一の円の上に第1の洗浄液ノズル41の吐出位置R1、第2の洗浄液ノズル43の吐出位置R2が位置するように設定されている。従って洗浄液を吐出するノズルを第1の洗浄液ノズル41から第2の洗浄液ノズル43に切り替えた場合にも、ウエハWの表面に形成される液界面の位置は変化しないことになる。また既述のように第1の洗浄液ノズル41の吐出位置R1がウエハWの中心部から30mm離れて位置するとき、第1の窒素ガスノズル51の吐出位置N1が、ウエハWの中心部から右側に15mm離れるように設定されている。そして、第2の窒素ガスノズル53は、その時の第2の窒素ガスノズル53の吐出位置N2がウエハWの中心部から15mm離れて位置するように設けられている。従って窒素ガスを吐出するノズルを第1の窒素ガスノズル51から第2の窒素ガスノズル53に切り替えた場合にも、窒素ガスの吐出位置から液界面までの距離も変化しないことになる。
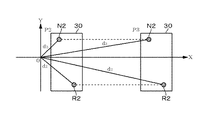
続いてノズルアーム30をウエハWの周縁側に向けて、X方向に15mm/秒の速度で移動させる。図10はノズルアーム30がP2よりもウエハWの周縁に近いP3に位置している状態を示している。第2の洗浄液ノズル43の吐出位置R2からウエハWの中心部までの距離d2と、第2の窒素ガスノズル53の吐出位置N2からウエハWの中心部までの距離d3との差(d2−d3)は、図15に示すようにノズルアーム30がP2に位置しているときよりも、P3に位置しているときの方が短くなる。
ノズルアーム30がP2に位置する時のN2=(Na、Nb)
ノズルアーム30がP2に位置する時のR2=(Ra、Rb)
ノズルアーム30が距離k移動した後のN2=(Na+k、Nb)
ノズルアーム30が距離k移動した後のR2=(Ra+k、Rb)
となる。従って移動距離をxと置いた場合のd2及びd3は、
ノズルアーム30がP3に位置する時のd2=√[(Ra+x)2+Rb2]
ノズルアーム30がP3に位置する時のd3=√[(Na+x)2+Nb2]
となる。
そしてノズルアーム30の移動途中で第2の洗浄液ノズル43及び第2の窒素ガスノズル53を用いるようにしている。第2の窒素ガスノズル53は窒素ガスの吐出流量の多いため液界面を押す力が強くなり、洗浄液の吐出位置と窒素ガスの吐出位置との距離も話すことができるため、液撥ねを抑えることができる。
また第1の実施の形態の変形例として、ノズルアーム30は、旋回アームに設けられていてもよい。即ち第1の実施の形態では、ノズルアーム30をX方向に沿って移動させることにより、各ノズルを直線に沿って移動させているが、各ノズルを円弧軌跡を描くように移動させてもよい。図18はこのような例を示し、ノズルアーム30として図18中、O1を回転中心として旋回する構成のものを用いている。駆動部は、アームを旋回させる図示しない回転部となり、また図示しない昇降部が設けられ、ノズルアーム30は昇降自在に構成される。従ってノズルアーム30、駆動部及び昇降部がノズル移動部になる。第1の洗浄液ノズル41の吐出位置R1と第1の窒素ガスノズル51の吐出位置N1は、ウエハWの中心部を通る円弧軌跡上に設けられる。この実施の形態の場合には、ステップ2でノズルアーム30を旋回させることにより、第1の洗浄液ノズル41の吐出位置R1がウエハWの中心部から15mmから離れるように移動され、その時第1の窒素ガスノズル51の吐出位置N1がウエハWの中心部に位置することになる。
また第2の実施の形態に係る基板洗浄装置として、2本のノズルアームを備えるように構成してもよい。第2の実施の形態は、例えば図20、図21に示すように第2の洗浄液ノズル53を備えていないことを除いて、第1の実施の形態に示したノズルアーム30と同様に構成された第1のノズルアーム38と、他の窒素ガスノズル59を備えた第2のノズルアーム39とを備えている。図中60は、現像用のノズルアーム、61は現像液用のノズルバス、63はガイドレールである。第2のノズルアーム39は、ノズルアーム30と同様に構成された駆動部、昇降部により支持され、第1のノズルアーム38のガイドレール33と平行に伸びるガイドレール70に沿って移動するように構成されている。第2のノズルアーム39は、ウエハW上の第1のノズルアーム38の移動する領域とは異なる領域、例えばウエハWの中心部からX方向に沿って左側の領域を移動するように構成されている。また他の窒素ガスノズル59は、第1の窒素ガスノズル51及び第2の窒素ガスノズル53と同様に配管70を介して他の窒素ガス供給部71と接続されている。
図24に示すように第1の洗浄液ノズル41の吐出位置R1がウエハWの中心部から30mmに位置し、第1の窒素ガスノズル51の吐出位置N1がウエハWの中心部から15mmに位置した後、窒素ガスを吐出するノズルを第1の窒素ガスノズル51から第2の窒素ガスノズル53に切り替える。
その後第2の窒素ガスノズル53の吐出位置N2のウエハWの中心部からの距離(この例では、60mm)と、他の窒素ガスノズル59の吐出位置N3とウエハWの中心部からの距離が等しくなる位置まで移動する。この間第2の洗浄液の吐出と、第2の窒素ガスとの吐出とが行われており、第2の窒素ガスノズル53は、第1の窒素ガスノズル51よりも流量が大きいため、ステップ5では、ステップ1〜3に比べて液界面を強い力で押すことができる。
その後、窒素ガスを吐出するノズルを他の窒素ガスノズル59に切り替え、第1のノズルアーム38及び第2のノズルアーム39をウエハWの周縁方向に移動させる。図25は、窒素ガスの吐出を第2の窒素ガスノズル53から他の窒素ガスノズル59に切り替えた後の状態を示している。この時第1のノズルアーム38は、図26に示すようにX方向に沿って、右側に移動するが、第2のノズルアーム39は、X方向に沿って左側に移動する。また第2のノズルアーム39の移動速度は、第1のノズルアーム38より速い速度に設定される。このため洗浄液の吐出位置からウエハWの中心部までの距離L1と窒素ガスの吐出位置からウエハWの中心部までの距離L2との差が徐々に小さくなる。一例をあげるとL2−L1が17mmから9mmまで近づく。この結果、他の窒素ガスノズル59の吐出位置N3は、ウエハWの周縁側に近づくにつれて液界面に近づくため、窒素ガスが液界面を押す力が徐々に増すことになる。そのため液残りや液千切れが抑制され、第1の実施の形態と同様の効果を得ることができる。
また第2のノズルアーム39の他の窒素ガスノズル59からガスを吐出しながら当該第2のノズルアーム39をウエハWの周縁側に移動させているときに、第1のノズルアーム38の窒素ガスノズル51、53からガスを、例えば少流量で吐出する場合も技術的範囲に含まれる。
そして窒素ガスのせん断応力を高めた上で、窒素ガスを前半は低流量で供給して乾燥コア(液の中央部の乾燥領域)を形成した後に、後半は高流量で供給して乾燥コアを広げるようにする。このような手法によれば、ウエハWの中心部の液残りがより一層抑えられる。低流量の時間と高流量の時間とは同じであることに限られない。具体例については後述の実施例の欄に記載している。
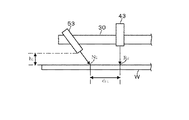
第2の窒素ガスノズル53から窒素ガスをウエハWの表面に対して斜めに吐出すると、ウエハWの表面に形成される液界面にかかるせん断応力は、窒素ガスをウエハWに対して垂直に吐出した場合においてウエハW表面に形成される液界面にかかるせん断応力よりも大きくなる。第2の窒素ガスノズル53の窒素ガスの吐出方向の水平面に対する角度θ2が45度の場合の液面にかかるせん断応力は、角度θ2が90度の場合に液面にかかるせん断応力よりも1.5倍の強さとなる。このように第2の窒素ガスノズル53の窒素ガスの吐出方向を水平面に対して45度に設定して液面にかかるせん断応力を大きくすれば、ノズルアーム30のスキャン速度を速くした場合にも液残りや液千切れを抑制することができる。
第2の窒素ガスノズル53の窒素ガスの吐出方向を水平面に対して90度に設定した場合においても、窒素ガスの流量を大きくすることで液面に対して大きなせん断応力が得られるが、液撥ねやミスト発生のおそれがある。従って第2の窒素ガスノズル53の窒素ガスの吐出方向を斜めに設定することが有効であり、特に水平面に対して90度に設定することが有利である。
そして図29に示すように第2の窒素ガスノズル53の先端部のウエハWの表面からの高さがh2となるようにノズルアーム30を上昇させると、第2の窒素ガスノズル53の吐出位置N2は、ウエハWの表面を第2の窒素ガスノズル53の先端部が傾く方向に移動する。一方で第2の洗浄液ノズル43は、真下に吐出するように設けているため、ノズルアーム30を昇降させてもウエハW表面における第2の洗浄液ノズル43の吐出位置R2は変わらない。従って第2の窒素ガスノズル53の吐出位置N2は、第2の洗浄液ノズル43の吐出位置R2に近づき、第2の窒素ガスノズル53の吐出位置N2から第2の洗浄液ノズル43の吐出位置R2までの距離はd12となる。このようにノズルアーム30を昇降させることにより、第2の窒素ガスノズル53の吐出位置N2から第2の洗浄液ノズル43の吐出位置R2までの距離を変更することができる。なお、第2の洗浄液ノズル43の洗浄液の吐出方向は、真下に向いていなくてもよく、例えば第2の窒素ガスノズル53のガスの吐出方向と異なる角度(水平面に対する角度)であれば、斜めであってもよい。
本発明を評価するために第1の実施の形態に係る基板洗浄装置を用い、評価パターンを用いて露光したウエハWに現像液を供給し、実施例及び比較例に係る洗浄処理を行いパターンの欠陥の計数を行った。実施例に用いたウエハWの表面に形成されたレジスト膜と反射防止膜との接触角差は、37.8°である。洗浄処理中のウエハの回転速度は750rpmに設定し、ノズルアーム30の移動速度は、10mm/秒に設定した。また比較例として、実施例と同様の構成の基板洗浄装置を用い、ステップ2の終了後、洗浄液ノズル及び窒素ガスノズルの切り替えを行わず、第1の洗浄液及び第1の窒素ガスをウエハに向けて吐出した状態でノズルアーム30をX方向に沿ってウエハWの周縁に向けて移動させて、ウエハの洗浄を行った。この場合ガスの吐出位置から液界面までの距離は、一定である。比較例では、2561個のパターンの欠陥が確認できたが、実施例では、パターンの欠陥は8個に軽減され、本発明の洗浄効果が高いことが確認できた。
窒素ガスの吐出位置と洗浄液の液界面との離間距離が、ウエハWの洗浄効果にもたらす影響を調べるために以下の評価試験を行った。基板洗浄装置は、ノズルアーム30に設置する第1の窒素ガスノズル51の位置を変えることにより、液界面と窒素ガスの吐出位置との距離を以下のように7通りに設定し、第1の洗浄液ノズル41及び第1の窒素ガスノズル51のみを用いて、評価パターンを用いて露光したウエハWに現像液を供給した後、洗浄を行った。ウエハWの洗浄後、乾燥処理を行いウエハの中心部から12〜15cmの領域に存在するパターンの欠陥の数を計数した。結果は以下の表1のとおりである。
[表1]

本発明を評価するために第1の実施の形態に係る基板洗浄装置を用い、評価パターンを用いて露光したウエハWに現像液を供給し、第1の窒素ガスノズル51の先端部の高さをウエハWの上方25mmと5mmとに設定して洗浄処理を行い、パターンを形成してウエハWの表面を検査した。ウエハWの中心部から3cm以内における残渣欠陥(現像欠陥)の計数を行った。第1の窒素ガスノズル51の先端部の高さをウエハWの上方25mmに設定した場合の欠陥は8個であり、第1の窒素ガスノズル51の先端部の高さをウエハWの上方5mmに設定した場合の欠陥は3個であった。第1の窒素ガスノズル51の先端部の高さを低く設定することでウエハWの中心部付近の液残りを減少することができると言える。
水平面に対して45度の角度で吐出される窒素ガスの吐出位置と洗浄液の液界面との距離が、ウエハWの洗浄効果にもたらす影響を調べるために以下の評価試験を行った。基板洗浄装置は、ノズルアーム30に設置する第2の窒素ガスノズル53を水平面から45度の角度に設け、その設置位置をウエハWの中心側に移動させた。第2の窒素ガスノズル53の吐出位置N2と洗浄液の液界面との距離をAmm、A+1mm、A+2mmの3通りに設定したところ、前記距離がA+1mmのときはAmmよりも欠陥がおよそ3倍になり、A+2mmはおよそ6倍になった。従って距離を変えることにより洗浄効果が変わることが理解される。
5 制御部
10 カップ体
11 スピンチャック
13 回転機構
30 ノズルアーム
33 ガイドレール
38 第1のノズルアーム
39 第2のノズルアーム
41 第1の洗浄液ノズル
43 第2の洗浄液ノズル
51 第1の窒素ガスノズル
53 第2の窒素ガスノズル
59 他の窒素ガスノズル
N1 第1の洗浄液ノズル41の吐出位置
N2 第2の洗浄液ノズル43の吐出位置
N3 他の窒素ガスノズル59の吐出位置
R1 第1の窒素ガスノズル51の吐出位置
R2 第2の窒素ガスノズル53の吐出位置
W ウエハ
Claims (8)
- 基板を回転させながら洗浄液及びガスを用いて基板を洗浄する装置において、
基板を水平に保持する基板保持部と、
前記基板保持部を鉛直軸周りに回転させる回転機構と、
前記基板保持部に保持された基板に各々洗浄液を供給するための第1の洗浄液ノズル及び第2の洗浄液ノズルと、
前記基板保持部に保持された基板にガスを吐出する基板の中心部にガスを吐出するときに用いられる第1のガスノズルと、
前記第1のガスノズルの移動軌跡から外れる位置に設けられた第2のガスノズルと、
前記第1の洗浄液ノズル、第2の洗浄液ノズル、第1のガスノズル及び第2のガスノズルを移動させるためのノズル移動部と、
前記第1の洗浄液ノズルから洗浄液を基板の中心部に吐出するステップと、次いで前記洗浄液の吐出位置を前記基板の中心部から周縁側に移動させた後、前記第1のガスノズルからガスを当該中心部に吐出するステップと、続いて第1の洗浄液ノズル及び第1のガスノズルから夫々洗浄液及びガスの吐出を行いながら前記第1の洗浄液ノズル及び前記第1のガスノズルの各吐出位置を基板の周縁側に向けて移動させるステップと、次に前記第1の洗浄液ノズルから第2の洗浄液ノズルに洗浄液の吐出を切替えると共に、前記第1のガスノズルから第2のガスノズルにガスの吐出を切替え、第2の洗浄液ノズルからの洗浄液の吐出及び第2のガスノズルからのガスの吐出を行いながら当該第2の洗浄液ノズル及び当該第2のガスノズルの各吐出位置を基板の周縁側に向けて移動させるステップと、を実行するように制御信号を出力する制御部と、を備え、
前記第2の洗浄液ノズルは、吐出位置が第1の洗浄液ノズルの吐出位置の移動軌跡から外れる位置に設定され、
第2の洗浄液ノズル及び第2のガスノズルの各吐出位置から基板の中心部までの距離を、夫々d2及びd3とすると、第2の洗浄液ノズルから洗浄液を吐出しているときには、d3<d2であり、かつ第2の洗浄液ノズルが基板の周縁側に移動するにつれて、d2とd3との差が徐々に小さくなるように構成されていることを特徴とする基板洗浄装置。 - 前記第2のガスノズルにおけるガスの吐出流量は、前記第1のガスノズルにおけるガスの吐出流量よりも大きく設定されていることを特徴とする請求項1に記載の基板洗浄装置。
- 前記第2の洗浄液ノズル及び第2のガスノズルは、昇降機構により昇降自在な共通のノズル移動部に設けられ、
前記第2のガスノズルのガスの吐出方向は、水平面に対して30度〜60度の範囲で傾いており、
基板の洗浄処理の種別と基板に対する第2のガスノズルの吐出口の高さとを対応付けたデータを記憶する記憶部を備え、複数の洗浄処理の種別の中から選択された洗浄処理の種別に対応する第2のガスノズルの吐出口の高さを前記記憶部の中から読み出して前記昇降機構に制御信号を出力する制御部と、を備えたことを特徴とする請求項1または2に記載の基板洗浄装置。 - 前記第2のガスノズルのガスの吐出方向は、水平面に対して45度±5度であることを特徴とする請求項3記載の基板洗浄装置。
- 前記第1の洗浄液ノズル、第2の洗浄液ノズル、第1のガスノズル及び第2のガスノズルは、共通のノズル移動部に設けられていることを特徴とする請求項1ないし4のいずれか一項記載の基板洗浄装置。
- 前記第1の洗浄液ノズル、第2の洗浄液ノズル、第1のガスノズル及び第2のガスノズルのうちの少なくとも一つのノズルが設けられているノズル移動部は、他のノズルが設けられているノズル移動部とは別個に独立して移動可能なノズル移動部に設けられていることを特徴とする請求項1ないし4のいずれか一項に記載の基板洗浄装置。
- 基板を回転させながら洗浄液及びガスを用いて基板を洗浄する方法において、
基板を基板保持部に水平に保持する工程と、
前記基板保持部を鉛直軸周りに回転させながら、第1の洗浄液ノズルから洗浄液を基板の中心部に吐出する工程と、
次いで前記洗浄液の吐出位置を基板の周縁側に移動させた後、第1のガスノズルからガスを前記基板の中心部に吐出する工程と、
続いて第1の洗浄液ノズル及び第1のガスノズルから夫々洗浄液及びガスの吐出を行いながら前記第1の洗浄液ノズル及び前記第1のガスノズルの各吐出位置を基板の周縁側に向けて移動させる工程と、
次に前記第1の洗浄液ノズルから第2の洗浄液ノズルに洗浄液の吐出を切替えると共に、前記第1のガスノズルの移動軌跡から外れる位置において、前記第2の洗浄液ノズルと共通のノズル移動部に水平面に対して30度〜60度の範囲で傾いた状態で設けられた第2のガスノズルを用いて、前記第1のガスノズルから第2のガスノズルにガスの吐出を切替え、第2の洗浄液ノズルからの洗浄液の吐出及び第2のガスノズルからのガスの吐出を行いながら当該第2の洗浄液ノズル及び当該第2のガスノズルの各吐出位置を基板の周縁側に向けて移動させる工程と、
複数の洗浄処理の種別の中から選択された洗浄処理の種別に対応する第2のガスノズルの吐出口の高さを、基板の洗浄処理の種別と基板に対する第2のガスノズルの吐出口の高さとを対応付けたデータを記憶する記憶部の中から読み出して前記ノズル移動部を昇降させる昇降機構に出力して、第2のガスノズルの吐出口の高さを調整する工程と、を含み、
前記第2の洗浄液ノズルは、吐出位置が第1の洗浄液ノズルの吐出位置の移動軌跡から外れる位置に設定され、
前記第2の洗浄液ノズル及び第2のガスノズルの各吐出位置から基板の中心部までの距離を、夫々d2及びd3とすると、第2の洗浄液ノズルから洗浄液を吐出しているときには、d3<d2であり、かつ第2の洗浄液ノズルが基板の周縁側に移動するにつれて、d2とd3との差が徐々に小さくなることを特徴とする基板洗浄方法。 - 基板を回転させながら洗浄液及びガスを用いて基板を洗浄する装置に用いられるコンピュータプログラムを記憶した記憶媒体であって、
前記コンピュータプログラムは、請求項7に記載の基板洗浄方法を実行するようにステップ群が組まれていることを特徴とする記憶媒体。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014014864A JP6007925B2 (ja) | 2013-05-28 | 2014-01-29 | 基板洗浄装置、基板洗浄方法及び記憶媒体 |
| US14/283,331 US9704730B2 (en) | 2013-05-28 | 2014-05-21 | Substrate cleaning apparatus, substrate cleaning method and non-transitory storage medium |
| KR1020140062387A KR102126591B1 (ko) | 2013-05-28 | 2014-05-23 | 기판 세정 장치, 기판 세정 방법 및 비일시적인 기억 매체 |
| TW103118328A TWI568507B (zh) | 2013-05-28 | 2014-05-26 | 基板清洗裝置、基板清洗方法及非臨時性記憶媒體 |
| CN201410232087.5A CN104217979B (zh) | 2013-05-28 | 2014-05-28 | 基板清洗装置和基板清洗方法 |
| US15/598,358 US9805958B2 (en) | 2013-05-28 | 2017-05-18 | Substrate cleaning apparatus, substrate cleaning method and non-transitory storage medium |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013112395 | 2013-05-28 | ||
| JP2013112395 | 2013-05-28 | ||
| JP2014014864A JP6007925B2 (ja) | 2013-05-28 | 2014-01-29 | 基板洗浄装置、基板洗浄方法及び記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015008267A JP2015008267A (ja) | 2015-01-15 |
| JP2015008267A5 JP2015008267A5 (ja) | 2016-03-31 |
| JP6007925B2 true JP6007925B2 (ja) | 2016-10-19 |
Family
ID=52338346
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014014864A Active JP6007925B2 (ja) | 2013-05-28 | 2014-01-29 | 基板洗浄装置、基板洗浄方法及び記憶媒体 |
| JP2014058221A Active JP6102807B2 (ja) | 2013-05-28 | 2014-03-20 | 基板洗浄装置、基板洗浄方法及び記憶媒体 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014058221A Active JP6102807B2 (ja) | 2013-05-28 | 2014-03-20 | 基板洗浄装置、基板洗浄方法及び記憶媒体 |
Country Status (3)
| Country | Link |
|---|---|
| JP (2) | JP6007925B2 (ja) |
| KR (1) | KR102126591B1 (ja) |
| TW (1) | TWI568507B (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6613206B2 (ja) * | 2015-06-18 | 2019-11-27 | 株式会社Screenホールディングス | 基板処理装置 |
| TWI661477B (zh) | 2015-06-18 | 2019-06-01 | 日商思可林集團股份有限公司 | 基板處理裝置 |
| JP6960489B2 (ja) * | 2016-03-31 | 2021-11-05 | 株式会社Screenホールディングス | 基板処理方法 |
| JP6807162B2 (ja) * | 2016-04-13 | 2021-01-06 | 東京エレクトロン株式会社 | 基板洗浄方法、基板洗浄装置及びコンピュータ読み取り可能な記録媒体 |
| CN107470225A (zh) * | 2017-08-28 | 2017-12-15 | 广州沃安实业有限公司 | 一种清洗机 |
| JP7034634B2 (ja) | 2017-08-31 | 2022-03-14 | 株式会社Screenホールディングス | 基板処理方法および基板処理装置 |
| TWI643683B (zh) * | 2017-10-19 | 2018-12-11 | Scientech Corporation | 流體供應裝置 |
| JP2019169624A (ja) * | 2018-03-23 | 2019-10-03 | 株式会社Screenホールディングス | 現像方法 |
| CN115069639B (zh) * | 2022-05-31 | 2023-11-14 | 江苏卓玉智能科技有限公司 | 半导体晶圆的清洗装置 |
| WO2024014346A1 (ja) * | 2022-07-14 | 2024-01-18 | 東京エレクトロン株式会社 | 基板処理装置、基板処理方法、及び基板処理プログラム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7927429B2 (en) * | 2003-11-18 | 2011-04-19 | Tokyo Electron Limited | Substrate cleaning method, substrate cleaning apparatus and computer readable recording medium |
| WO2005104200A1 (ja) * | 2004-04-23 | 2005-11-03 | Tokyo Electron Limited | 基板洗浄方法、基板洗浄装置、コンピュータプログラムおよびプログラム記憶媒体 |
| KR100846690B1 (ko) | 2004-06-04 | 2008-07-16 | 도쿄엘렉트론가부시키가이샤 | 기판 세정 방법 및 컴퓨터로 판독 가능한 기억 매체 |
| JP4324527B2 (ja) * | 2004-09-09 | 2009-09-02 | 東京エレクトロン株式会社 | 基板洗浄方法及び現像装置 |
| KR100940136B1 (ko) * | 2006-08-29 | 2010-02-03 | 다이닛뽕스크린 세이조오 가부시키가이샤 | 기판처리방법 및 기판처리장치 |
| US20100206338A1 (en) * | 2006-10-02 | 2010-08-19 | Sez Ag | Device and method for removing liquid from a surface of a disc-like article |
| JP5090089B2 (ja) | 2006-10-19 | 2012-12-05 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| JP5151629B2 (ja) * | 2008-04-03 | 2013-02-27 | 東京エレクトロン株式会社 | 基板洗浄方法、基板洗浄装置、現像方法、現像装置及び記憶媒体 |
| JP4780808B2 (ja) | 2009-02-03 | 2011-09-28 | 東京エレクトロン株式会社 | 現像処理方法及び現像処理装置 |
| JP5538102B2 (ja) * | 2010-07-07 | 2014-07-02 | 株式会社Sokudo | 基板洗浄方法および基板洗浄装置 |
-
2014
- 2014-01-29 JP JP2014014864A patent/JP6007925B2/ja active Active
- 2014-03-20 JP JP2014058221A patent/JP6102807B2/ja active Active
- 2014-05-23 KR KR1020140062387A patent/KR102126591B1/ko active IP Right Grant
- 2014-05-26 TW TW103118328A patent/TWI568507B/zh active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015008267A (ja) | 2015-01-15 |
| JP6102807B2 (ja) | 2017-03-29 |
| KR102126591B1 (ko) | 2020-06-24 |
| TWI568507B (zh) | 2017-02-01 |
| TW201519966A (zh) | 2015-06-01 |
| JP2015008273A (ja) | 2015-01-15 |
| KR20140139969A (ko) | 2014-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6007925B2 (ja) | 基板洗浄装置、基板洗浄方法及び記憶媒体 | |
| US9805958B2 (en) | Substrate cleaning apparatus, substrate cleaning method and non-transitory storage medium | |
| US9972512B2 (en) | Liquid processing method, memory medium and liquid processing apparatus | |
| US20090070946A1 (en) | Apparatus for and method of processing substrate | |
| US10475638B2 (en) | Substrate processing apparatus, substrate processing method, and computer-readable recording medium having stored thereon substrate processing program | |
| KR20040028385A (ko) | 웨이퍼 건조 장치 | |
| US20070116459A1 (en) | Rinsing method, developing method, developing system and computer-read storage medium | |
| CN105742155A (zh) | 基板处理装置及基板处理方法 | |
| JPWO2005050724A1 (ja) | 基板洗浄方法、基板洗浄装置およびコンピュータ読み取り可能な記録媒体 | |
| JPWO2005119748A1 (ja) | 基板洗浄方法およびコンピュータ読取可能な記憶媒体 | |
| KR101883015B1 (ko) | 액 처리 장치, 액 처리 방법 및 기억 매체 | |
| KR101950047B1 (ko) | 기판 세정 건조 방법 및 기판 현상 방법 | |
| JP2008060104A (ja) | 基板処理方法および基板処理装置 | |
| TWI797159B (zh) | 基板處理方法、基板處理裝置及記錄媒體 | |
| JP2016042518A (ja) | 基板処理装置および基板処理方法 | |
| US11488846B2 (en) | Substrate processing method and substrate processing apparatus | |
| US11923218B2 (en) | Development processing apparatus and development processing method | |
| KR102504087B1 (ko) | 기판 처리 장치 및 방법 | |
| KR20220073995A (ko) | 기판 처리액 회수 유닛 및 이를 구비하는 기판 처리 장치 | |
| JP2019160890A (ja) | 基板処理装置、基板液処理方法およびノズル | |
| JP2008251658A (ja) | 基板処理装置 | |
| KR20080072248A (ko) | 웨이퍼 세정장치 및 이를 이용한 웨이퍼 후면 세정방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160829 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6007925 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |