JP5800194B2 - 車両用操舵装置及び荷役車両 - Google Patents
車両用操舵装置及び荷役車両 Download PDFInfo
- Publication number
- JP5800194B2 JP5800194B2 JP2011244629A JP2011244629A JP5800194B2 JP 5800194 B2 JP5800194 B2 JP 5800194B2 JP 2011244629 A JP2011244629 A JP 2011244629A JP 2011244629 A JP2011244629 A JP 2011244629A JP 5800194 B2 JP5800194 B2 JP 5800194B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- reaction force
- vehicle
- angle
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/008—Control of feed-back to the steering input member, e.g. simulating road feel in steer-by-wire applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
- B62D5/005—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback
- B62D5/006—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback power actuated
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
フォークリフトの操舵装置には、油圧式パワーステアリング装置又は電動式パワーステアリング装置が用いられている。油圧式パワーステアリング装置は、運転者の操舵に基づいて、油圧ポンプを電動モータで駆動して作動油を油圧シリンダに供給し、油圧シリンダのピストンを移動させ、転舵輪を転舵させる。電動式パワーステアリング装置は、運転者の操舵に基づいて、電動モータを駆動して、後輪のラック軸及びそれに連結されるタイロッドを移動させ、転舵輪を転舵させる。
(1)旋回の初期(0度近く)では、操舵部材を小舵角回して前部(フォーク部分)を軽く右に向ける。このとき操舵角θhは、図9の“A”で示す領域にあり、運転者の受ける反力は小さい。(2)旋回の前半では、急操舵で後部をコーナー外側に振る。このとき操舵角θhは、図9の“B”で示す領域にあり、運転者は大きな反力を受ける。この反力は、操舵に力が入りすぎて操舵角が意図に反して大きくなってしまうことを防止するため、運転者に与えられるものである。運転者はこの反力に逆らって操舵部材を回すことになる。(3)旋回の後半に入ると、操舵方向を反転させ、急操舵で後部を直進方向に戻さなければならない。もしハンドルの戻しが遅れると、車両を直進状態に収束させることが難しくなる。例えば、フォークリフトは直角を超えて旋回し過ぎになり、接触事故などにつながる。
したがって前述の(3)旋回後半において、運転者が急操舵で操舵方向を反転させるときに、ハンドルの戻しがスムーズにできるように、運転者に与える反力を増やして操舵をアシストしてやるような制御が望まれていた。
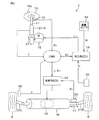
図1は、本発明の荷役車両としてのフォークリフト1の概略構成を示す模式的側面図である。フォークリフト1は、車体2と、その車体2の前部に設けられた荷役装置3と、車体2を支持する駆動輪としての前輪5及び転舵輪としての後輪6と、後輪6を転舵させるための車両用操舵装置7とを備えている。
さらにこの車両用操舵装置7には、車体に取り付けられたヨーレートセンサ33と前述した重量センサ34が備えられている。ヨーレートセンサ33は車両の回転角速度(ヨーレート)γを検出するセンサであり、例えば圧電素子を用いて振動体にかかるコリオリの力を検出することにより、車両の回転角速度を検出する。このヨーレートは、車両の回転角が右方向へ増大するときは正の値として出力し、左方向へ増大するときは負の値として出力するものとする。重量センサ34は、前述したように、フォーク25に積載した積載物の重量を検出するセンサである。
転舵系ECU22は、操舵角センサ13によって検出された操舵角に基づいて転舵モータ19を回転駆動する。転舵モータ19の回転は、転舵ギヤを介してラック軸17の平行運動に変換され、ラック軸17の一対の端部にそれぞれ連結されているタイロッド21L,21Rを介して後輪6に伝達され、これにより後輪6が転舵される。
目標反力電流算出部B1は、図9に示した操舵角θhと反力との関係を関数として記憶しており、この関係に基づいて、操舵角θhを目標反力電流に変換する。目標反力電流は、ゲインKの増幅器B2によって増幅され、電流制御部B3に入力される。一方、反力モータ15に流れる電流が検出され、その反転信号が電流制御部B3に入力され、電流制御部B3で目標反力電流と反力モータ15に流れる電流との差がとられて、この差がPWM出力回路B4に供給され、反力モータ15を駆動するためのPWM駆動信号が生成される。そしてこのPWM駆動信号を反力モータ15に供給することにより、反力モータ15→ギヤ17→シャフト11を介して、操舵部材10に反力トルクが与えられる。
以下、制御部B5の行う制御処理を、フローチャート(図4)を用いて詳しく説明する。なお積載物の重量Wは、積載荷重を考慮した反力制御手順を示す他のフローチャート(図5)において用いられ、このフローチャート(図4)を実施する場合、参照しない。
ヨー角δの絶対値が基準値S1よりも大きければ、ステップS4に移り、増幅器B2のゲインKを増大させる。例えば“1.5”という値にする。このように旋回の後半に入って操舵反力を増大させることにより、ハンドルの戻しをアシストし、車両を速やかに直進状態に収束させることができる。
操舵角θhが一定の範囲内(−θ0<θh<θ0)に収束するまでは、ステップS7からステップS8に移り、タイマーのカウント値が設定値T1に到達しているかどうか調べる。設定値T1に到達するまでは、反力制御を続行する(ステップS6)。設定値T1に到達すれば、操舵角θhが一定の範囲内(−θ0<θh<θ0)に収束していなくても、反力制御を打ち切る(ステップS8のYES)。設定値T1は、車両が直角コーナーを旋回しているときに、通常ハンドルの切り戻しに要する時間と判断される値(例えば1秒)に設定する。車両が直角コーナーを旋回しているのでなく180度コーナーを旋回している、すなわちUターンしている場合は、ハンドルの切り戻しに設定値T1以上の時間がかかるので、この場合は設定値T1の経過後、反力によるアシストを中止し、ヨーレートγの時間積分値を0にクリアし(ステップS9)、タイマーのカウント値を0に戻して(ステップS10)、制御から抜ける。設定値T1を設ける理由は、設定値T1以上の時間がかかる場合Uターンしていると判断し、反力アシスト増の状態を解除するためである。
図5は、積載荷重を考慮した反力制御手順を説明するためのフローチャートである。この制御では、重量センサ34によって検出された積載物の重量Wを用いる。
前進であるならば、ヨー角δの絶対値を基準値S1と比較する(ステップT5)。基準値S1は、車両が直角コーナーなど、角度の大きなコーナーを旋回していると判断することができる値に設定されるが、本制御では、積載物の重量Wに応じて基準値S1の設定値を変更する。図6は、積載物の重量Wと基準値S1との関係を示すグラフである。積載物がない(重量W=0)の場合、基準値S1を例えば80度に設定するが、積載物の重量Wが大きくなるに従って基準値S1を小さくしていく。積載物の重量Wが制限重量に近ければ基準値S1を例えば70度に設定する。このように、積載物の重量Wが大きいほど基準値S1を小さくしていく理由は、積載重量が大きいときはオーバーステアの傾向になるので、旋回の比較的早期からハンドル戻し機能を働かせるためである。
ステップT5,T6でヨー角δの絶対値が基準値S1,S2よりも大きければ、ステップT7に移り、増幅器B2のゲインKを増大させる。例えば“1.5”という値にする。このように基準値S1,S2を超えた旋回の後半に入って操舵反力を増大させることにより、ハンドルの戻しをアシストし、車両を速やかに直進状態に収束させることができる。
以上のように、前進しながら旋回している時は積載物の重量Wが大きいほど、操舵反力を増大させるタイミングを早め、後退しながら旋回している時は積載物の重量Wが大きいほど、操舵反力を増大させるタイミングを遅らせるという制御内容を採用することにより、フォークリフト1の運転者は、直角コーナーでは、旋回の後半に入って適切なタイミングで操舵反力を受けながら操舵することができる。よって、旋回後半の車両のふらつき旋回を防止し、運転者の操舵負担を軽減しながら、車両を速やかに直進状態に収束させることができる、
以上で、本発明の実施の形態を説明したが、本発明の実施は、上述の実施形態に限定されるものではない。例えば、ヨー角が基準値Sを超えた時点で増幅器B2のゲインKをK=1.5という固定値にしてから、時間が経過するに連れてゲインKを徐々に小さくしていく、という実施例を採用しても良い。図8はこの場合のゲインKの変化を示すグラフである。このようにゲインKを徐々に小さくしていくことにより、ハンドルの切り戻しが進み直進走行に至るまで徐々に反力を弱めていくことにより、車両旋回時の不安定を回避し、運転者に自然な操舵感を与えることが出来る。
Claims (6)
- タイヤを転舵させる転舵輪駆動機構と、操舵部材の操舵角を検出する操舵角検出部と、前記操舵部材に操舵反力を付与する反力アクチュエータと、前記転舵輪駆動機構を駆動する転舵アクチュエータと、車体のヨー角を検出するヨー角検出部と、前記操舵角検出部によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータを制御する反力アクチュエータ制御部とを備え、
前記反力アクチュエータ制御部は、前記ヨー角検出部によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を増大させる第1の制御と、増大させた前記操舵反力を、時間が経過するに従って小さくしていく第2の制御と、前記操舵角検出部によって検出された操舵角に基づいて直進走行になったと判定されれば、前記操舵反力の増大を停止する第3の制御とを行うように設計されている、車両用操舵装置。 - 前記反力アクチュエータ制御部は、所定時間にわたって、前記操舵部材に付与する操舵反力を増大させる、請求項1に記載の車両用操舵装置。
- 積載物の重量を検出する重量検出部をさらに備え、前記反力アクチュエータ制御部は、前記重量検出部の検出値に応じて前記基準角の値を変更する、請求項1又は請求項2に記載の車両用操舵装置。
- 前記反力アクチュエータ制御部は、車両の前進時は前記重量検出部の検出値が大きいほど前記基準角の値を小さくし、車両の後退時は前記重量検出部の検出値が大きいほど前記基準角の値を大きくする、請求項3に記載の車両用操舵装置。
- 前記操舵部材と前記転舵輪駆動機構との機械的な連結が断たれたステアバイワイヤ式を採用する請求項1〜請求項4のいずれか1項に記載の車両用操舵装置。
- 請求項1〜請求項5のいずれか1項に記載の車両用操舵装置を装備した荷役車両。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011244629A JP5800194B2 (ja) | 2011-11-08 | 2011-11-08 | 車両用操舵装置及び荷役車両 |
| CN201210397297.0A CN103085859B (zh) | 2011-11-08 | 2012-10-18 | 车辆用操舵装置及装卸车辆 |
| US13/664,098 US8855859B2 (en) | 2011-11-08 | 2012-10-30 | Vehicle steering system and material handling vehicle |
| EP12191177.0A EP2591977B1 (en) | 2011-11-08 | 2012-11-03 | Vehicle steering system and material handling vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011244629A JP5800194B2 (ja) | 2011-11-08 | 2011-11-08 | 車両用操舵装置及び荷役車両 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013100007A JP2013100007A (ja) | 2013-05-23 |
| JP2013100007A5 JP2013100007A5 (ja) | 2015-01-15 |
| JP5800194B2 true JP5800194B2 (ja) | 2015-10-28 |
Family
ID=47143677
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011244629A Active JP5800194B2 (ja) | 2011-11-08 | 2011-11-08 | 車両用操舵装置及び荷役車両 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8855859B2 (ja) |
| EP (1) | EP2591977B1 (ja) |
| JP (1) | JP5800194B2 (ja) |
| CN (1) | CN103085859B (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9302893B2 (en) * | 2013-02-07 | 2016-04-05 | The Raymond Corporation | Vibration control systems and methods for industrial lift trucks |
| CN103818260A (zh) * | 2014-02-26 | 2014-05-28 | 安徽合力股份有限公司 | 一种基于can总线的内燃叉车的组合式仪表 |
| CN204775442U (zh) * | 2015-06-24 | 2015-11-18 | 浙江中力机械有限公司 | 电子转向式单驱动三支点叉车 |
| US9828026B2 (en) * | 2016-02-02 | 2017-11-28 | Premier Coil Solutions, Inc. | Transport trailer load balancing suspension and steering systems |
| JP6756216B2 (ja) * | 2016-09-27 | 2020-09-16 | 株式会社ジェイテクト | 操舵制御装置 |
| JP6737202B2 (ja) * | 2017-02-16 | 2020-08-05 | 株式会社島津製作所 | フォークリフト |
| CN111497925B (zh) * | 2019-01-30 | 2022-05-13 | 比亚迪股份有限公司 | 叉车转向桥及叉车 |
| US11685427B2 (en) | 2021-04-12 | 2023-06-27 | Toyota Material Handling, Inc. | Electric actuator steering system for forklifts |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0686222B2 (ja) * | 1988-03-14 | 1994-11-02 | 本田技研工業株式会社 | 操舵装置 |
| JPH10244952A (ja) * | 1997-03-04 | 1998-09-14 | Nippon Yusoki Co Ltd | 電気式パワーステアリング装置 |
| JPH115419A (ja) * | 1997-06-18 | 1999-01-12 | Toyota Autom Loom Works Ltd | 産業車両の車体揺動制御装置 |
| JP3775978B2 (ja) * | 2000-09-26 | 2006-05-17 | 日本輸送機株式会社 | 電気式パワーステアリング装置 |
| JP4470565B2 (ja) * | 2004-04-09 | 2010-06-02 | 株式会社ジェイテクト | 車両用操舵装置 |
| WO2006054678A1 (ja) * | 2004-11-19 | 2006-05-26 | Mitsubishi Heavy Industries, Ltd. | フォークリフトの転倒防止装置 |
| JP2006168483A (ja) * | 2004-12-14 | 2006-06-29 | Nissan Motor Co Ltd | 車両用操舵制御装置 |
| JP2006264393A (ja) * | 2005-03-22 | 2006-10-05 | Honda Motor Co Ltd | 車両用操舵装置 |
| JP4876433B2 (ja) | 2005-04-22 | 2012-02-15 | 日産自動車株式会社 | 車両用操舵制御装置 |
| JP4941723B2 (ja) * | 2006-12-28 | 2012-05-30 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP2008296681A (ja) * | 2007-05-30 | 2008-12-11 | Komatsu Ltd | 車両のステアリング制御装置 |
| JP5386103B2 (ja) * | 2008-04-17 | 2014-01-15 | ニチユ三菱フォークリフト株式会社 | 車両のステアリング制御装置 |
| JP5167086B2 (ja) * | 2008-11-18 | 2013-03-21 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP2010254237A (ja) * | 2009-04-28 | 2010-11-11 | Jtekt Corp | 車両用操舵装置 |
| JP5392550B2 (ja) * | 2009-05-13 | 2014-01-22 | 株式会社ジェイテクト | 車両用操舵装置 |
| DE102009050776B4 (de) * | 2009-10-27 | 2021-06-24 | Audi Ag | Verfahren zum Beaufschlagen einer Lenkhandhabe mit einem Drehmoment oder einer Kraft sowie Kraftfahrzeug |
| JP5747482B2 (ja) * | 2010-03-26 | 2015-07-15 | 日産自動車株式会社 | 車両用環境認識装置 |
-
2011
- 2011-11-08 JP JP2011244629A patent/JP5800194B2/ja active Active
-
2012
- 2012-10-18 CN CN201210397297.0A patent/CN103085859B/zh active Active
- 2012-10-30 US US13/664,098 patent/US8855859B2/en active Active
- 2012-11-03 EP EP12191177.0A patent/EP2591977B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US8855859B2 (en) | 2014-10-07 |
| EP2591977A3 (en) | 2014-08-20 |
| EP2591977A2 (en) | 2013-05-15 |
| US20130116890A1 (en) | 2013-05-09 |
| CN103085859A (zh) | 2013-05-08 |
| CN103085859B (zh) | 2016-03-16 |
| EP2591977B1 (en) | 2017-02-01 |
| JP2013100007A (ja) | 2013-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5800194B2 (ja) | 車両用操舵装置及び荷役車両 | |
| JP5807778B2 (ja) | 荷役車両用操舵装置 | |
| JP2018024281A (ja) | アクチュエータ制御装置 | |
| JP2013100007A5 (ja) | ||
| JP2006335213A (ja) | 車両用操舵装置 | |
| JP2005343315A (ja) | 車両用操舵装置 | |
| JP5087920B2 (ja) | 電動パワーステアリング装置 | |
| CN107176201A (zh) | 转向操纵控制装置 | |
| JP2012254705A (ja) | 車両用操舵装置及び荷役車両 | |
| JP2004338562A (ja) | 電動パワーステアリング制御装置 | |
| JP5026036B2 (ja) | 車両のロールオーバ制御装置 | |
| JP4419932B2 (ja) | 車両転舵制御装置 | |
| JP2010234841A (ja) | 車両の後輪トー角制御装置 | |
| KR20170075601A (ko) | 차량의 능동 전륜 조향 시스템의 제어 장치 및 제어 방법 | |
| JP6132171B2 (ja) | 車両用操舵装置 | |
| JP5776837B2 (ja) | 車両用操舵制御装置及び車両用操舵制御方法 | |
| KR101172098B1 (ko) | 능동조향장치의 반력저감을 위한 전동식 파워스티어링시스템 | |
| JP2013209026A (ja) | ステアリング制御装置 | |
| JP7254452B2 (ja) | 操舵制御装置 | |
| JP5769006B2 (ja) | 車両用操舵装置及び荷役車両 | |
| JP2008189006A (ja) | 電動パワーステアリング装置 | |
| JP4956477B2 (ja) | 後輪トー角制御装置 | |
| JP2007015495A (ja) | 電動パワーステアリング装置 | |
| JP5303333B2 (ja) | 車両の後輪操舵制御装置 | |
| JP2010052485A (ja) | 車両のステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141022 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150618 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150618 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150714 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150730 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150812 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5800194 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |