JP5765577B2 - スタッカークレーン - Google Patents
スタッカークレーン Download PDFInfo
- Publication number
- JP5765577B2 JP5765577B2 JP2011289297A JP2011289297A JP5765577B2 JP 5765577 B2 JP5765577 B2 JP 5765577B2 JP 2011289297 A JP2011289297 A JP 2011289297A JP 2011289297 A JP2011289297 A JP 2011289297A JP 5765577 B2 JP5765577 B2 JP 5765577B2
- Authority
- JP
- Japan
- Prior art keywords
- article
- deviation amount
- correction
- stacker crane
- lowering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Description
ちなみに、スタッカークレーンは、収納部に収納されている物品を、別の収納部に移し替える移替え作業を行うこともある。
尚、一般には、降ろし用基準高さと掬い用目標高さとは、同じ高さに設定され、また、降ろし用目標高さと掬い用基準高さとは、同じ高さに設定されることになる。
前記昇降台を昇降範囲の最下降側に設定した物品修正位置に下降させるに伴って、引退位置の前記物品載置体に載置した物品を受止め案内して、前記物品載置体に対する設定適正状態に物品を位置決めする位置決め手段が、前記走行台車又は前記昇降マストに支持される状態で装備されている点を特徴とする。
前記引退位置の前記物品載置体に載置した物品の前記設定適正状態からのズレ量を検出するズレ量検出手段が設けられ、
クレーン制御手段が、前記ズレ量検出手段にて検出される前記ズレ量が修正判定値を超える場合には、前記昇降台を前記物品修正位置に下降させる物品修正処理を実行するように構成されている点を特徴とする。
降ろし処理によって、収納部や入出庫部に対して物品を移載することを適正通り行わせることができる。
前記クレーン制御手段が、前記ズレ量検出手段にて検出される前記ズレ量が前記修正判定値とその修正判定値よりも大きな設定許容値との間の場合には、前記物品修正処理を実行し、かつ、前記ズレ量検出手段にて検出される前記ズレ量が前記設定許容値以上の場合には、前記物品修正処理に代えて、警報手段を作動させる警報処理を実行するように構成されている点を特徴とする。
前記位置決め手段が、回転ローラによって物品の底部を受止め案内するように構成されている点を特徴とする。
図1に示すように、物品Bを収納する収納部Sを備える一対の物品保管棚1が、物品Bを出し入れする前面を対向させた状態で、間隔を隔てて左右に並ぶ形態で設置され、一対の物品保管棚1の間を、物品搬送用空間2として、その物品搬送用空間2の内部に、スタッカークレーンKが装備され、また、一対の物品保管棚1の横側脇には、物品入出庫部としての荷受台3が装備されている。
物品保管棚1には、図1及び図2に示すように、収納部Sが棚横幅方向並びに棚上下幅方向に沿って並ぶ状態で装備されている。
そして、スタッカークレーンKが、上部をガイドレール6にて案内されながら走行レール5上を棚横幅方向Xに沿って走行するように設けられている。
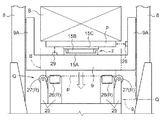
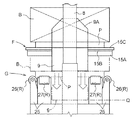
ちなみに、スタッカークレーンKの昇降マスト8は、走行台車7の前端部と後端部の夫々に1つずつ設置される状態で前後一対設けられ、そして、昇降マスト8の上端部同士を連結する上部フレーム8Aが設けられて、この上部フレーム8Aが、ガイドレール6にて案内されるようになっている。
昇降用ワイヤ10は、走行台車7の一端に装備した巻き取りドラム11から繰り出されるものであって、上部フレーム8Aや一方の昇降マスト8の上部及び下部に設けた案内プーリ12に案内される状態で架設されている。
そして、走行用電動モータ14にて、前後一対の走行輪7Aのうちの前方側の走行輪7Aを正逆に回転駆動することにより、走行台車7を走行レール5に沿って走行させて、スタッカークレーンKを物品保管棚1の棚横幅方向に沿って移動させるように構成されている。
つまり、先端枠15Cが、図3に示すように、物品搬送用空間2内に引退する引退位置と、図1に示すように、収納部S内に突出する突出位置とに出退駆動自在で、かつ、昇降台9の昇降により昇降駆動自在な物品載置体として機能するように構成されている。
尚、スタッカークレーンKの物品移載装置Fは、入庫作業において荷受台3から物品Bを取出すときにも、上記掬い処理と同様に先端枠15Cを作動させ、出庫作業において荷受台3に物品Bを降ろすときにも、上記降ろし処理と同様に先端枠15Cを作動させることになる。
つまり、物品保管棚1は、棚前後方向に間隔を隔てる前後一対の柱1aからなる柱組を、棚横幅方向に沿って並設し、柱組の夫々に物品Bを載置する腕木20を棚上下幅方向に並べて設けて、腕木20にて物品Bを載置する収納部Sを、棚横幅方向に隣接して並ぶ柱組の間に、棚上下幅方向に並ぶ状態で形成するように構成されている。
本実施形態においては、基準上下位置は、棚上下幅方向における上下方向用レーザー測距センサ21の設置位置に定められている。
本実施形態においては、基準横位置は、走行レール5の一端部に定められて、その基準横位置には、横方向用反射体24が装備されている。
尚、降ろし用基準高さと掬い用目標高さとは同じ高さであり、掬い用基準高さと降ろし用目標高さとは同じ高さである。
ちなみに、スタッカークレーンKは、自動運転する状態と手動運転する状態とに切換えられるものであって、手動運転する状態においては、走行指令等の各種の操作情報を指令する手動操作部E(図7参照)からの指令情報がクレーン制御部KCに指令されるように構成されている。
尚、本実施形態においては、物品修正位置Qは、昇降台9の昇降範囲の最下降位置に設定されている。
本実施形態のズレ量検出手段Jは、ズレ量として、スタッカークレーンKの前後幅方向に沿う方向における物品Bの位置ズレ量(以下、前後ズレ量と呼称)、及び、スタッカークレーンKの横幅方向に沿う方向における物品Bの位置ズレ量(以下、横ズレ量と呼称)を検出し、加えて、平面視での適正姿勢(傾き)に対する物品Bのズレ量(以下、傾きズレ量と呼称)を検出するように構成されている。
これら測距センサ28は、引退位置の先端枠15Cに載置された物品BのパレットPの側面に対して検出作用して、昇降台9の側壁部9AからパレットPの側面までの距離を検出するように構成され、そして、これら測距センサ28の検出情報がクレーン制御部KCに入力されている。
尚、測距センサ28としては、レーザー式の測距センサや超音波式の測距センサを用いることができる。
また、クレーン制御部KCが、スタッカークレーンKの前後幅方向に沿う方向における物品Bの位置として、一対の測距センサ28の検出値の平均値を求めて、その平均値と設定基準値との差から前後ズレ量を求めるように構成されている。
この物品検出センサ29は、掬い処理によって、突出位置の先端枠15Cが引退位置に引退作動するに伴って、物品Bを検出しない非検出状態から物品Bを検出する検出状態になり、この物品検出センサ29の検出情報がクレーン制御部KCに入力されている。
尚、物品検出センサ29は、反射型の光電スイッチ等を用いることができる。
そして、クレーン制御部KCは、掬い処理を実行するごとに、前後ズレ量、横ズレ量、及び、傾きズレ量を求めて、それらのズレ量のうちのいずれかが、修正判定値を超える場合には、物品修正処理を実行することになるが、それらのズレ量のうちのいずれかが、設定許容値以上の場合には、物品修正処理を実行せずに、警報処理を実行することになる。
掬い処理を行ったときに先端枠15Cに載置される物品Bが設定適正状態から大きくずれていても、物品Bを設定適正状態に修正できるため、その後の降ろし処理において、物品Bを適正通り移載することができる。
(1)上記実施形態では、物品載置体としての先端枠15Cに対する物品Bの設定適正状態として、スタッカークレーンKの前後幅方向に沿う方向における物品Bの位置が適正であり、スタッカークレーンKの横幅方向に沿う方向における物品Bの位置が適正であり、かつ、平面視での物品Bの姿勢(傾き)が適正姿勢(傾き)である状態が、設定適正状態であるとする場合を例示したが、設定適正状態は、これに限定されるものではない。
8 昇降マスト
9 昇降台
15C 物品載置体
30 警報手段
F 物品移載装置
G 位置決め手段
J ズレ量検出手段
Q 物品修正位置
R 回転ローラ
Claims (4)
- 走行台車から立設した昇降マストに沿って昇降自在な昇降台に、物品載置体を出退自在に備えた物品移載装置が装備されたスタッカークレーンであって、
前記昇降台を昇降範囲の最下降側に設定した物品修正位置に下降させるに伴って、引退位置の前記物品載置体に載置した物品を受止め案内して、前記物品載置体に対する設定適正状態に物品を位置決めする位置決め手段が、前記走行台車又は前記昇降マストに支持される状態で装備されているスタッカークレーン。 - 前記引退位置の前記物品載置体に載置した物品の前記設定適正状態からのズレ量を検出するズレ量検出手段が設けられ、
クレーン制御手段が、前記ズレ量検出手段にて検出される前記ズレ量が修正判定値を超える場合には、前記昇降台を前記物品修正位置に下降させる物品修正処理を実行するように構成されている請求項1記載のスタッカークレーン。 - 前記クレーン制御手段が、前記ズレ量検出手段にて検出される前記ズレ量が前記修正判定値とその修正判定値よりも大きな設定許容値との間の場合には、前記物品修正処理を実行し、かつ、前記ズレ量検出手段にて検出される前記ズレ量が前記設定許容値以上の場合には、前記物品修正処理に代えて、警報手段を作動させる警報処理を実行するように構成されている請求項2記載のスタッカークレーン。
- 前記位置決め手段が、回転ローラによって物品の底部を受止め案内するように構成されている請求項1〜3のいずれか1項に記載のスタッカークレーン。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011289297A JP5765577B2 (ja) | 2011-12-28 | 2011-12-28 | スタッカークレーン |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011289297A JP5765577B2 (ja) | 2011-12-28 | 2011-12-28 | スタッカークレーン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013136451A JP2013136451A (ja) | 2013-07-11 |
| JP5765577B2 true JP5765577B2 (ja) | 2015-08-19 |
Family
ID=48912563
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011289297A Active JP5765577B2 (ja) | 2011-12-28 | 2011-12-28 | スタッカークレーン |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5765577B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9008884B2 (en) | 2010-12-15 | 2015-04-14 | Symbotic Llc | Bot position sensing |
| TWI622540B (zh) | 2011-09-09 | 2018-05-01 | 辛波提克有限責任公司 | 自動化儲存及取放系統 |
| CN104891083B (zh) * | 2015-05-19 | 2017-07-21 | 深圳市华星光电技术有限公司 | 一种用于自动化仓库的货架 |
| JP6927007B2 (ja) * | 2017-12-12 | 2021-08-25 | 株式会社ダイフク | 移載設備、移載方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4235912B2 (ja) * | 2004-03-18 | 2009-03-11 | 株式会社ダイフク | 物品搬送装置 |
| JP4378653B2 (ja) * | 2007-01-12 | 2009-12-09 | 株式会社ダイフク | 物品搬送装置 |
| JP4978797B2 (ja) * | 2007-10-26 | 2012-07-18 | 株式会社ダイフク | 物品搬送装置 |
| JP2012086955A (ja) * | 2010-10-20 | 2012-05-10 | Daifuku Co Ltd | 物品搬送装置 |
| JP5534355B2 (ja) * | 2011-05-19 | 2014-06-25 | 株式会社ダイフク | 物品収納設備 |
-
2011
- 2011-12-28 JP JP2011289297A patent/JP5765577B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013136451A (ja) | 2013-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1741644B1 (en) | Article storage facility | |
| TWI380938B (zh) | Items storage equipment | |
| TWI397493B (zh) | Item handling device | |
| US20080044262A1 (en) | Article storage facility and operation method thereof | |
| JP2011020778A (ja) | 物品保管設備 | |
| JP5765577B2 (ja) | スタッカークレーン | |
| JP4941728B2 (ja) | 物品搬送装置 | |
| JP5590411B2 (ja) | スタッカークレーン | |
| JP5884507B2 (ja) | 物品保管設備の学習方法 | |
| JP5339140B2 (ja) | 物品収納設備 | |
| JP5534355B2 (ja) | 物品収納設備 | |
| JP5610230B2 (ja) | 物品搬送設備 | |
| JP5278744B2 (ja) | 物品収納設備 | |
| JP4973927B2 (ja) | 物品搬送装置 | |
| JP4399734B2 (ja) | 昇降式の物品搬送装置 | |
| JP4235912B2 (ja) | 物品搬送装置 | |
| JP6593270B2 (ja) | 物品搬送設備 | |
| JP6187375B2 (ja) | 物品搬送設備 | |
| JP4257590B2 (ja) | 昇降式の物品搬送装置 | |
| JP4399737B2 (ja) | 物品移載装置 | |
| JP3761012B2 (ja) | 物品保管設備 | |
| JP4399738B2 (ja) | 物品収納設備 | |
| JP5305080B2 (ja) | 物品収納設備 | |
| JP5240503B2 (ja) | 物品収納設備 | |
| JP5280012B2 (ja) | 物品昇降装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150521 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150603 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5765577 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |