JP4399738B2 - 物品収納設備 - Google Patents
物品収納設備 Download PDFInfo
- Publication number
- JP4399738B2 JP4399738B2 JP2005169517A JP2005169517A JP4399738B2 JP 4399738 B2 JP4399738 B2 JP 4399738B2 JP 2005169517 A JP2005169517 A JP 2005169517A JP 2005169517 A JP2005169517 A JP 2005169517A JP 4399738 B2 JP4399738 B2 JP 4399738B2
- Authority
- JP
- Japan
- Prior art keywords
- article
- storage
- protrusion
- traveling
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Landscapes
- Warehouses Or Storage Devices (AREA)
Description
その収納棚の前面側において前記収納部の並び方向に移動操作される移動基台と、
その移動基台に装備されて、平面視形状が矩形状の物品を対向する一対の辺の長手方向を前記収納部の奥行き方向に沿わせた状態で保持する物品保持部が前記移動基台側に引退させた引退位置と前記収納部内に突入させるための突出位置とに亘って出退移動操作される移載装置と、
前記移動基台の前記収納棚に対する前記収納部の並び方向での位置を検出する位置検出手段と、
前記移動基台の移動及び前記移載装置における前記保持部の出退作動を制御する運転制御手段とが設けられ、
前記運転制御手段が、前記複数の収納部のうちで移載作業対象とする収納部が指示されると、前記位置検出手段の検出情報に基づいて、移載作業対象とする収納部に対する目標停止位置に前記移動基台を移動させる移動制御、及び、その移動基台が目標停止位置に停止する前の突出開始位置に移動すると、前記移載装置における保持部を引退位置から突出位置に向けて突出作動させることを開始して突出位置に突出させる早め突出制御を実行するように構成されている物品収納設備に関する。
ちなみに、特許文献1においては、収納部が上下左右に備えられた収納棚の前面側の作業通路を走行するスタッカークレーンが備えられるものであって、そのスタッカークレーンに昇降操作自在に装備された昇降台が、収納部の並び方向として、上下方向及び左右方向に移動操作される移動基台として機能するものであり、昇降台に装備した伸縮式のフォーク装置が、物品保持部としての先端側部分を昇降台側に引退させた引退位置と収納部内に突入させるための突出位置とに亘って出退移動させる移載装置として機能することになる。
そして、早め突出制御として、スタッカークレーンが目標停止位置としての目標走行位置に停止する前の突出開始位置に移動(走行)すると、物品保持部としての先端側部分を引退位置から突出位置に向けて突出作動を開始することや、昇降台が目標停止位置としての目標昇降位置に停止する前の突出開始位置に移動(昇降)すると、物品保持部としての先端側部分を引退位置から突出位置に向けて突出作動を開始することが行われるようになっている。又、早め突出制御における突出開始位置は、突出作動を開始した移載装置の物品保持部が棚に干渉することなく突出位置に連続して移動できるようにすることを考慮して、移動基台の目標停止位置から設定距離を離れた一定位置に設定されるようになっている。
このように、上述した物品収納設備においては、突出開始位置として設定可能な位置は、収納棚の前面とその前面側において移動操作されるフォーク装置の移動面との相対位置により制限されてしまうものであり、結果として、物品の入手庫に要する時間の短縮が制限されるものであった。
本発明は上記事情に鑑み、移載装置の突出作動を開始する位置を、収納部の横幅方向について、できるだけ目標停止位置から遠い位置に設定でき、もって、物品の入手庫に要する時間の一層の短縮を図ることができる物品収納設備を提供することを目的としている。
その収納棚の前面側において前記収納部の並び方向に移動操作される移動基台と、
その移動基台に装備されて、平面視形状が矩形状の物品を対向する一対の辺の長手方向を前記収納部の奥行き方向に沿わせた状態で保持する物品保持部が前記移動基台側に引退させた引退位置と前記収納部内に突入させるための突出位置とに亘って出退移動操作される移載装置と、
前記移動基台の前記収納棚に対する前記収納部の並び方向での位置を検出する位置検出手段と、
前記移動基台の移動及び前記移載装置における前記保持部の出退作動を制御する運転制御手段とが設けられ、
前記運転制御手段が、前記複数の収納部のうちで移載作業対象とする収納部が指示されると、前記位置検出手段の検出情報に基づいて、移載作業対象とする収納部に対する目標停止位置に前記移動基台を移動させる移動制御、及び、その移動基台が目標停止位置に停止する前の突出開始位置に移動すると、前記移載装置における保持部を引退位置から突出位置に向けて突出作動させることを開始して突出位置に突出させる早め突出制御を実行するように構成されている物品収納設備において、
前記物品保持部が、前記早め突出制御を実行するときに、前記保持部を前記引退位置から前記突出位置に突出作動させる途中において、保持している平面視矩形状の物品を対向する一対の辺の長手方向が前記収納部の奥行き方向と交差する傾斜姿勢に姿勢変更させる形態で、前記保持部を前記引退位置から前記突出位置に突出作動させる間において物品を90度回転させるように制御するように構成されている点にある。
したがって、図13に示すように、物品9の移動方向下手側の辺の収納部側の角部が、当該収納部4に隣接する収納部4との境界側面のうち物品の移動方向で下手側の境界側面から遠ざかるように物品の平面視の姿勢が変化することになる。
本発明の第2特徴によると、収納部に収納されている物品は、保持部が前記突出位置から前記引退位置に引退作動する間に早め突出制御のときとは逆方向に90度回転するので、入庫処理において物品が収納部に収納される際に変化した平面視の姿勢が、出庫処理において物品が収納部から取り出される際に、元の姿勢に戻されるので、出庫処理後の物品の取り扱いにおいて、物品の平面視姿勢の変化による影響を受けることなく、従来と同様の取り扱いができるようになる。
したがって、本発明の第2特徴によると、物品を90度回転させて収納部に収納する場合でも、収納部から物品を取り出した後は、従来と同様に物品を取り扱うことができるので、物品収納設備として便利なものを得ることができる。
本発明の第3特徴によると、前記移動基台の前記目標停止位置に対する手前箇所での走行状態が高速走行状態のときには低速走行状態のときよりも、前記突出開始位置が目標停止位置から離れた位置となるので、高速走行状態のときには、移載装置における保持部の突出作動が、低速走行状態での突出開始位置より手前位置から突出作動が開始される。
したがって、目標停止位置に対する手前箇所での移動基台の走行状態が高速走行状態のときには、移動基台に装備された移載装置における保持部の突出作動が開始されてから保持部が突出位置に至るまでの突出作動時間のうち、移動基台が移動しながら経過する時間が、目標停止位置に対する手前箇所での移動基台の走行状態に拘わらず同じ突出開始位置において突出作動を開始する従来の物品収納設備の構成に比べて、比較的長くなるので、目標停止位置に到達してから行われる突出作動量は比較的少なくて済む。
これにより、目標停止位置に対する手前箇所での移動基台の走行状態が高速走行状態である場合に行われる突出作動は、上記従来の物品収納設備の構成に比べて、目標停止位置に到達してから比較的短い時間内に完了することになり、物品の入出庫に要する時間が短縮される。
このように、本発明の第3特徴によると、目標停止位置に対する手前箇所での走行状態に応じた適切な位置で保持部の突出作動を開始させることができ、もって、入出庫動作に要する時間を短縮することができる物品収納設備を得ることができる。
そして、前後一対の支柱1aと左右一対の載置支持部1bとにより一つの収納部4が形成され、この収納部4が縦横に複数並べて設けられている。
そして、走行レール5の一端側には、スタッカークレーン3の運転を管理する地上側コントローラ7と、走行レール5を挟んで一対の荷載置台8とが設けられている。
そして、走行台車10の走行作動及び昇降台12の昇降作動により、昇降台12が移載作業対象とする収納部4に対する目標停止位置に移動可能に構成されている。
つまり、本物品収納設備は、物品9を収納する複数の収納部4が並設された収納棚1A、1Bの前面側において収納部4の並び方向に移動操作される移動基台として昇降台12が設けられている。
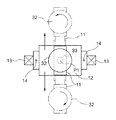
また、プライマリフォーク11cには、回転駆動軸33を回転駆動する回転用モータ30が内臓されており、図示しない伝動機構を通じて、回転用モータ30の回転力が回転駆動軸33に伝達され、これによりターンテーブル32が回転駆動軸33回りに回転作動するようになっている。
また、本物品収納設備は、昇降台12に装備されたフォーク装置11のプライマリフォーク11cに設けられたターンテーブル32が、保持している平面視矩形状の物品9を上下軸心P1周りに回転操作できるように構成されている。
この昇降用チェーン14は、ガイドレール6に沿って案内される上部フレーム15に設けた案内スプロケット16と一方の昇降マスト13に設けた案内スプロケット17とに巻き掛けられて、走行台車10の一端に装備した巻き取りドラム18に連結されている。
そして、巻き取りドラム18をインバータ式のモータである昇降用電動モータ19にて正逆に駆動回転させて、昇降用チェーン14の繰り出し操作や巻き取り操作で昇降台12を昇降させるように構成されている。
そして、昇降用レーザ測距計20は、昇降台12の昇降方向において、走行台車10に設けられたミラー22の配設位置を基準位置として、その基準位置と昇降台12との距離を検出することにより、昇降経路上における昇降台12の昇降位置を検出するように構成されている。
そして、走行台車10は、走行用電動モータ24の作動で走行レール5に沿って走行するように構成されている。
そして、走行用レーザ測距計25は、走行台車10に設置されている反射板26に向けて投射して、走行レール5の端部からの走行台車10の距離を検出することにより、走行経路上における走行台車10の走行位置を検出するように構成されている。
つまり、本物品収納設備は、昇降台12の収納棚1に対する収納部4の並び方向での位置を検出する位置検出手段として走行用レーザ測距計25を備えている。
そして、このクレーン制御装置27に対して、昇降用レーザ測距計20の検出情報および走行用レーザ測距計25の計測情報や、突出側リミットスイッチSW1及び引退側リミットスイッチSW2や、出退用ロータリエンコーダ28及び回転用ロータリエンコーダ31からの信号が入力されるように構成されている。
つまり、本物品収納設備は、昇降台12の移動及びフォーク装置11の出退作動を制御するクレーン制御装置27が設けられている。
そして、クレーン制御装置27は、荷載置台8の物品9を複数の収納部4のいずれかに入庫する入庫指令や、複数の収納部4のいずれかに収納されている物品9を荷載置部8に出庫する出庫指令などを地上側コントローラ7から受けると、走行台車10、昇降台12及びフォーク装置11の作動を制御して、荷載置台8の物品9を指令された収納部4に入庫する入庫動作や、指令された収納部4に収納されている物品9を荷載置部8に出庫する出庫動作を行うように構成されている。
そして、クレーン制御装置27は、入庫動作において、荷載置台8の物品9を掬い取る掬い用移載処理を実行したのち、収納部4に物品9を載置する卸し用移載処理を実行し、出庫動作において、複数の収納部4のいずれかの物品9を掬い取る掬い用移載処理を実行したのち、荷載置台8に物品9を載置する卸し用移載処理を実行する。
そして、掬い用目標昇降停止位置は、収納部4の載置支持部1bや荷載置台8の載置部よりも設定高さだけ低い位置が定められ、卸し用目標昇降停止位置Pv0は、収納部4の載置支持部1bや荷載置台8の載置部よりも設定高さだけ高い位置が定められている。
また、突出開始位置Ph1は、前記目標走行停止位置Ph0よりも走行台車10の走行方向で設定距離だけ手前に位置する走行速度判別用位置Ph2における昇降台12の走行状態が高速走行状態であるか低速走行状態であるかに応じて、移載処理毎に適切な位置が設定される。
移載制御部27cは、走行台車10が走行速度判別用位置Ph2に移動して、走行制御部27aが検出信号S1を出力するまで待機状態となっている(ステップ#1)。移載制御部27cは、走行制御部27aが出力する検出信号S1を受信すると、突出開始位置設定処理を実行する(ステップ#2)。これにより、当該移載処理における目標走行停止位置Ph0に対する手前箇所での走行状態に応じた突出開始位置が設定される。
突出作動制御の実行が終了すると、移載制御部27cは、突出完了信号S2を昇降制御部27bに対して出力する(ステップ#6)。この時点が、図8における時刻t5に相当し、物品9は、物品収納棚1の収納部4内に突入した状態となっている(図3(ロ)、図10(ニ)の二点差線で示す状態)。
以下、別実施形態を列記する。
この場合、昇降速度判別用位置Pv2での昇降台12の昇降速度Vvが大きいときは小さいときよりも、突出許可昇降位置Pv1は目標昇降停止位置Pv0から離れるように設定されることになる。
G2 引退位置
P1 回転軸心
Ph0 目標停止位置
Ph1 突出開始位置
Ph2 目標停止位置に対する手前箇所
1,1A,1B 収納棚
4 収納部
9 物品
11 移載装置
12 移動基台
25 位置検出手段
27 運転制御手段
32 物品保持部
Claims (3)
- 平面視形状が矩形状の物品を対向する一対の辺の長手方向を奥行き方向に沿わせた状態で収納する複数の収納部が横幅方向に並設された収納棚と、
その収納棚の前面側において前記収納部の並び方向に移動操作される移動基台と、
その移動基台に装備されて、平面視形状が矩形状の物品を対向する一対の辺の長手方向を前記収納部の奥行き方向に沿わせた状態で保持する物品保持部が前記移動基台側に引退させた引退位置と前記収納部内に突入させるための突出位置とに亘って出退移動操作される移載装置と、
前記移動基台の前記収納棚に対する前記収納部の並び方向での位置を検出する位置検出手段と、
前記移動基台の移動及び前記移載装置における前記保持部の出退作動を制御する運転制御手段とが設けられ、
前記運転制御手段が、前記複数の収納部のうちで移載作業対象とする収納部が指示されると、前記位置検出手段の検出情報に基づいて、移載作業対象とする収納部に対する目標停止位置に前記移動基台を移動させる移動制御、及び、その移動基台が目標停止位置に停止する前の突出開始位置に移動すると、前記移載装置における保持部を引退位置から突出位置に向けて突出作動させることを開始して突出位置に突出させる早め突出制御を実行するように構成されている物品収納設備であって、
前記物品保持部が、保持している平面視矩形状の物品を上下軸心周りに回転操作できるように構成され、
前記運転制御手段が、前記早め突出制御を実行するときに、前記保持部を前記引退位置から前記突出位置に突出作動させる途中において、保持している平面視矩形状の物品を対向する一対の辺の長手方向が前記収納部の奥行き方向と交差する傾斜姿勢に姿勢変更させる形態で、前記保持部を前記引退位置から前記突出位置に突出作動させる間において物品を90度回転させるように制御するように構成されている物品収納設備。 - 前記運転制御手段が、前記収納部に収納されている物品を保持させた前記保持部を前記突出位置から前記引退位置に引退作動させる間において、保持している物品を前記早め突出制御のときとは逆方向に90度回転させるように構成されている請求項1記載の物品収納設備。
- 前記運転制御手段が、前記移動基台の前記目標停止位置に対する手前箇所での走行状態が高速走行状態のときには低速走行状態のときよりも、前記突出開始位置を前記目標停止位置から離れるように変更調整するように構成されている請求項1又は2のいずれか1項に記載の物品収納設備。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005169517A JP4399738B2 (ja) | 2005-06-09 | 2005-06-09 | 物品収納設備 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005169517A JP4399738B2 (ja) | 2005-06-09 | 2005-06-09 | 物品収納設備 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006341960A JP2006341960A (ja) | 2006-12-21 |
| JP4399738B2 true JP4399738B2 (ja) | 2010-01-20 |
Family
ID=37639209
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005169517A Expired - Fee Related JP4399738B2 (ja) | 2005-06-09 | 2005-06-09 | 物品収納設備 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4399738B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5310686B2 (ja) * | 2010-09-28 | 2013-10-09 | 村田機械株式会社 | 物品搬送装置 |
-
2005
- 2005-06-09 JP JP2005169517A patent/JP4399738B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006341960A (ja) | 2006-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4586990B2 (ja) | 物品収納設備 | |
| EP1741644B1 (en) | Article storage facility | |
| JP6597551B2 (ja) | 物品搬送設備 | |
| EP2112095B1 (en) | Article conveyance device | |
| JP4140015B2 (ja) | 移動体の走行装置 | |
| EP1695936B1 (en) | Apparatus for avoiding collision when lowering container | |
| US20080044262A1 (en) | Article storage facility and operation method thereof | |
| EP1728738A1 (en) | Article transport facility and a method of operating the facility | |
| JP7546639B2 (ja) | 自動倉庫システム | |
| JP5765577B2 (ja) | スタッカークレーン | |
| JP6627677B2 (ja) | 物品収納設備 | |
| JP4618505B2 (ja) | 物品搬送装置 | |
| JP2008247558A (ja) | 物品搬送装置 | |
| JP2007119136A (ja) | 物品移載装置及びその物品移載装置を装備した物品搬送装置 | |
| JP4534152B2 (ja) | 物品収納設備 | |
| JP4399738B2 (ja) | 物品収納設備 | |
| JP6870643B2 (ja) | 物品搬送装置 | |
| JP4973927B2 (ja) | 物品搬送装置 | |
| JP5168557B2 (ja) | フォーク式の物品移載装置 | |
| JP4026436B2 (ja) | 物品搬送設備 | |
| JP4399734B2 (ja) | 昇降式の物品搬送装置 | |
| JP4399737B2 (ja) | 物品移載装置 | |
| JP4257590B2 (ja) | 昇降式の物品搬送装置 | |
| JPH11199010A (ja) | 物品保管設備 | |
| JP2001301988A (ja) | 荷積みシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090917 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091001 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091014 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121106 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121106 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121106 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131106 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |