以下に、本発明に係る実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。
[実施形態]
実施形態に係るコンバイン1を、図面に基づいて説明する。図1は、実施形態に係るコンバインの概略構成を示す側面図、図2は、実施形態に係るコンバインの概略構成を示す平面図である。なお、以下の説明では、前後方向とは、コンバイン1の前後方向である。さらに言えば、前後方向とは、このコンバイン1が直進する際の進行方向であり、直進方向前方を前方、後方を後方という。また、車幅方向とは、当該前後方向に対して水平に直交する方向であり、直進方向前方の右側を右側、直進方向前方の左側を左側という。さらに、鉛直方向とは、前後方向と車幅方向とに直交する方向である。これら前後方向、車幅方向及び鉛直方向は、互いに直交する。
図1に示す実施形態のコンバイン1は、駆動力源としてのエンジン3が発生する駆動力によって、自走しながら稲、麦等の穀稈を刈り取り、脱穀可能であるコンバインである。コンバイン1は、図1及び図2に示すように、機体フレーム2と、駆動力源としてのエンジン3と、走行装置4と、刈取装置5と、脱穀装置10と、グレンタンク8と、フィードチェーン駆動機構9とを備える。
機体フレーム2は、コンバイン1の車体の枠状の構造部材をなしている。エンジン3は、機体フレーム2上の前後方向前方に搭載されている。エンジン3は、コンバイン1で用いる駆動力の発生源である。エンジン3は、内燃機関であり、燃焼室で燃料を燃焼させることにより燃料のエネルギを機械的仕事に変換して回転力として出力する熱機関である。また、エンジン3は、機体フレーム2上の操作席21(図2に示す)を設けたキャビン22(図1及び図2に示す)の下方に設けられている。
走行装置4は、機体フレーム2の鉛直方向下側に設けられる。走行装置4は、エンジン3からの駆動力によって、コンバイン1全体を走行させるものである。走行装置4は、クローラ41を有する。クローラ41は、機体フレーム2の鉛直方向下方において車幅方向に間隔をあけて一対で設けられる。走行装置4は、エンジン3から伝達される駆動力によってクローラ41が駆動することでコンバイン1全体を前後方向前方に走行させる。
刈取装置5は、機体フレーム2の前部に設けられる。刈取装置5は、エンジン3からの駆動力によって駆動し穀稈を刈り取り、刈り取った穀稈を脱穀装置10などに搬送するものである。刈取装置5は、エンジン3からの駆動力によって駆動し穀稈を刈り取るものであって、圃場に植生する穀稈を分草する分草体51と、倒伏している穀稈を引き起こす引起装置52と、引き起こされた穀稈を切断する刈刃53が設けられると共に、刈り取られた穀稈を搬送する搬送装置56を備えている。分草体51は、車幅方向に間隔をあけて複数設けられ、刈取装置5の下部に設けられた円筒状の下方フレーム57の先端に取り付けられている。また、刈取装置5は、図示しない昇降シリンダにより機体フレーム2の前部に鉛直方向に沿って昇降自在に設けられている。
脱穀装置10は、刈取装置5の後方でかつグレンタンク8の側方に設けられ、下部の選別部6と上部の脱穀部7を有する。選別部6は、機体フレーム2の上方でかつ刈取装置5の搬送装置56の後方に設けられる。また、選別部6は、グレンタンク8の側方でかつ機体フレーム2の左側に設けられる。選別部6は、エンジン3からの駆動力によって、脱穀部7により脱穀された穀稈の藁等の夾雑物と穀粒とを分離する装置である。
なお、脱穀装置10を通過し、穀粒が扱ぎ取られた穀稈(排藁)は、コンバイン1の後方に配置されている排藁切断装置へ搬送される。排藁切断装置は、排藁搬送装置に投入された排藁を切断し、例えば、圃場に放出する。
脱穀部7は、機体フレーム2の上方でかつ刈取装置5の搬送装置56の後方に設けられる。また、脱穀部7は、グレンタンク8の側方でかつ機体フレーム2の左側に設けられる。脱穀部7は、エンジン3からの駆動力によって搬送された穀稈を脱穀するものである。すなわち、脱穀部7は、刈取装置5が刈り取った穀稈から穀粒を切離す装置である。
グレンタンク8は、脱穀装置10の側方に設けられる。グレンタンク8は、脱穀装置10の選別部6が回収した穀粒を一時的に貯蔵するものである。グレンタンク8は、排出オーガー81が接続される。排出オーガー81は、エンジン3からの駆動力によってグレンタンク8内の穀粒を搬送し、グレンタンク8の外部へ排出させるものである。
フィードチェーン駆動機構9は、フィードチェーン96を回転駆動して、刈取装置5の搬送装置56から脱穀装置10の脱穀部7に向けて、刈取装置5が刈り取った穀稈を搬送するものである。フィードチェーン駆動機構9は、脱穀装置10のグレンタンク8が配置されている側とは反対側、すなわち、左側部に配置されている。
また、コンバイン1は、図2に示すように、刈取装置5の前部に有した分草体51の下方に設けられ、地面Gに対する前記刈取装置5の高さを検出するセンサユニット100を備えている。本実施形態では、コンバイン1は、複数の分草体51のうち左側から2番目の分草体51にセンサユニット100を取り付けている。本発明では、センサユニット100は、複数の分草体51のうち車幅方向の両端と中央の分草体51以外に取り付けられれば良い。
次に、コンバイン1のセンサユニット100を、図面に基いて説明する。図3は、実施形態に係るコンバインの分草体を一部切欠いて、センサユニットの構成を示す側面図、図4は、実施形態に係るコンバインのセンサユニットの分草体を一部切欠いて、ユニット本体が接地体毎上方に退避した状態を示す側面図、図5は、実施形態に係るコンバインの刈取装置の分草体などの平面図、図6は、図3中のVI−VI線に沿う断面図、図7は、実施形態に係るコンバインのセンサユニットのユニット本体の断面図、図8は、図7中のVIII−VIII線に沿う断面図、図9は、実施形態に係るコンバインのセンサユニットを一部断面で示す平面図である。
センサユニット100は、図3及び図4に示すように、下方フレーム57に取り付けられた分草体51のカバー支持部材58に取り付けられた回動軸59にブラケット101を介して取り付けられている。回動軸59は、円柱状に形成され、刈取装置5の平面視では、前後方向と平行に配置されている。また、回動軸59は、刈取装置5の側面視では、前方に向うにしたがって徐々に上方に向かうように、前後方向と鉛直方向との双方に対して交差している。すなわち、回動軸59は、上部が下部に対して前方に位置するように、鉛直方向に対して約30度傾いた姿勢で設けられている。回動軸59は、前方の一端部59aがカバー支持部材58に取り付けられている。
ブラケット101は、回動軸59の他端部59bに取り付けられ、回動軸59の軸心回りに回転自在に設けられている。なお、カバー支持部材58とブラケット101との間には、平面視において、ブラケット101の長手方向が前後方向となるように、ブラケット101などを付勢するトルクばね102が、回動軸59の外周に取り付けられている。ブラケット101には、図5に示すように、分草体51のカバー支持部材58の回動軸59に取り付けられた取付部103と、ユニット取付部104と、第1規制突起105(図3及び図4などに示し、第1規制部に相当)と、第2規制突起106(図3及び図4などに示し、第2規制部に相当)と、を備えている。
取付部103は、平面視において、後方に向かうにしたがって車幅方向の幅が徐々に広がるV字状に形成されている。ユニット取付部104は、センサユニット100のユニット本体110が取り付けられるものであり、取付部103をV字状に形成する一対の板状部材103a,103bのうちの一方の板状部材103aから後方に向けて延出されて、前後方向に沿って直線状に延在した平板状に形成されている。こうして、ブラケット101は、図3及び図4に示すように、分草体51に取り付けられた取付部103と、該取付部103から後方へ向けて延出されたユニット取付部104を有する。
また、ユニット取付部104即ちブラケット101の後端部に、図6などに示すように、第1回転軸107が固定している。第1回転軸107は、車幅方向と平行な円柱状に形成され、ユニット本体110をユニット取付部104即ちブラケット101に対して該第1回転軸107の軸心P1(第1軸心に相当)回りに回転自在に取り付けるものである。即ち、ブラケット101の後端部に第1軸心に相当する第1回転軸107の軸心P1が設けられている。また、第1回転軸107に、該第1回転軸107の外周方向(径方向)に延在したセンサーアーム108を固定している。
第1規制突起105は、ユニット取付部104の上縁の後端部から上方に凸に形成されている。第2規制突起106は、ユニット取付部104の上縁の前端部から上方に凸に形成されている。
ブラケット101は、図3及び図4に示すように、機体フレーム2の側面視において、取付部103が後方に向かうにしたがって徐々に上方に向かい、ユニット取付部104が水平方向と平行に設けられている。ブラケット101は、取付部103とユニット取付部104とが連なる、その長さ方向中央部が屈曲した、ヘ字状に形成されている。ブラケット101は、前記長さ方向中央部よりも機体フレーム2の後方の部位としてのユニット取付部104の下縁が地面G即ち水平方向に平行に形成されている。また、ブラケット101のユニット取付部104に第1回転軸107が固定されていることで、ブラケット101の後端部としてのユニット取付部104に軸心P1が設けられている。
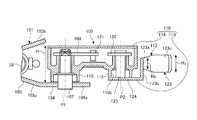
センサユニット100は、図3及び図4に示すように、ユニット本体110と、ポテンショメータ111(検出手段に相当)と、接地体112を備えている。ユニット本体110は、図6に示すように、金属製の鋳物で構成されたケース体113と、平板状の蓋体114とを備えている。ケース体113は、扁平な箱状に形成され、第1回転軸107を回転自在に通す円筒状のボス部115と、接地体112に固定された第2回転軸125をその軸心P2(第2軸心に相当)回りに回転自在に通す円筒状のボス部116とが一体に形成されている。
ケース体113は、ボス部115内に第1回転軸107を軸心P1回りに回転自在に通して、センサーアーム108を収容する。ケース体113に接地体112に固定された第2回転軸125を軸心P2回りに回転自在に通すボス部116が一体に設けられていることで、軸心P2が軸心P1よりも後方に配置される。蓋体114は、ケース体113の開口を塞ぐように、このケース体113に取り付けられている。ユニット本体110は、ケース体113のボス部115内に第1回転軸107を軸心P1回りに回転自在に通すことで、ブラケット101に対して車幅方向と平行な軸心P1回りに上下回転自在に取り付けられる。
また、ユニット本体110は、ブラケット101に取り付けられると、その下面110aには、図8に示すように、前後方向の中央に凹み117が形成されている。凹み117は、刈取装置5の側面視において、ユニット本体110の下面110aを山形に形成している。
ポテンショメータ111は、第1回転軸107の軸心P1回りのユニット本体110の回転位置を検出するものである。ポテンショメータ111は、図9に示すように、ユニット本体110に取り付けられているとともに、図4に示すように、ユニット本体110における軸心P1,P2双方を結ぶ仮想線L1の上側の部位に設けられている。ポテンショメータ111は、センサユニット100がブラケット101に取り付けられると、図9に示すように、ブラケット101のユニット取付部104の外側面104aに対して分草体51の刈幅方向の内側に配置されている。なお、外側面104aは、ブラケット101の外側面に相当する。ポテンショメータ111は、センサユニット100がブラケット101に取り付けられると、側面視において、ユニット本体110における軸心P1と軸心P2との間の部位に設けられている。
ポテンショメータ111の軸心回りに回転自在な検出軸118と、検出軸118に固定されこの検出軸118の外周方向(径方向)に延びた検出アーム119とは、ポテンショメータ111がユニット本体110に取り付けられると、図9に示すように、ユニット本体110のケース体113内に収容される。検出アーム119は、その先端がセンサーアーム108の先端部と係合部121により係合している。ポテンショメータ111は、ブラケット101に対して軸心P1回りにユニット本体110が回転されると、第1回転軸107にセンサーアーム108が固定されているために、検出アーム119が検出軸118の軸心回りに回転する。そして、ポテンショメータ111は、検出軸118の軸心回りに回転位置を検出することで、ユニット本体110の第1回転軸107の軸心P1回りの回転位置を検出する。
また、ポテンショメータ111には、第1規制突起105と第2規制突起106とに当接可能な規制ボルト120が取り付けられている。規制ボルト120は、第1規制突起105に当接してユニット本体110の軸心P1から離れた離間部110bが最下方に位置付けられる下降限界位置(図3に示す)と、第2規制突起106に当接してユニット本体110の離間部110bが最上方に位置付けられる上昇限界位置(図4に示す)と、の間を超えて、ユニット本体110が軸心P1回りにブラケット101に対して回転することを規制する。規制ボルト120は、第1規制突起105と協働して、ユニット本体110が下降限界位置よりも下方に回転することを規制し、第2規制突起106と協働して、ユニット本体110が上昇限界位置よりも上方に回転することを規制する。このように、第1規制突起105は、ユニット本体110が下降限界位置よりも下方に回転することを規制し、第2規制突起106は、ユニット本体110が上昇限界位置よりも上方に回転することを規制する。
ユニット本体110が軸心P1回りに下降限界位置まで下方回転した状態において、軸心P2が軸心P1よりも下方に位置する構成としている。また、ユニット本体110が下降限界位置にある状態において、図10(a)に示すように、軸心P1とポテンショメータ111の検出軸118の軸心とを結んだ仮想線L(図10(a)に一点鎖線で示す)よりも検出アーム119とセンサーアーム108とが係合する係合部121が上方に位置する構成としている。また、上昇限界位置では、図4に示すように、ユニット本体110の後部がブラケット101の下端よりも上方に位置する。このために、ユニット本体110は、下降限界位置からユニット本体110の後部がブラケット101の下端よりも上方に位置するように、軸心P1回りに回転可能な構成としている。
また、ユニット本体110内には、図7に示すように、第1のトルクばね122(第1付勢手段に相当)を設けている。第1のトルクばね122は、ユニット本体110のケース体113のボス部115の外周に取り付けられ、一端部がケース体113の内面に当接し、他端部がセンサーアーム108に取り付けられている。第1のトルクばね122は、一端部がケース体113の内面に当接し、他端部がセンサーアーム108に取り付けられていることで、上昇限界位置から下降限界位置に向ってユニット本体110を付勢する。即ち、第1のトルクばね122は、ブラケット101に対してユニット本体110を下方回転側へ付勢する。
接地体112は、ユニット本体110に軸心P2回りに回転自在に取り付けられているとともに、地面Gに接触することが可能である。接地体112は、図3及び図4に示すように、帯状部123と、この帯状部123の縁に連なった取付部124とを一体に備えている。帯状部123には、下降限界位置にユニット本体110が位置付けられると、図3に示すように、その長さ方向中央部123aが長さ方向両端部としての上下両端部123b,123cよりも前方に偏倚するように、側方視において、く字状に屈曲した屈曲部を形成している。なお、中央部123aが接地体112の中央部に相当し、上下両端部123b,123cが接地体112の上下両端部に相当する。接地体112は、その下端部123cの幅Hcが、図6に示すように、中央部123aの幅Haよりも広く形成されている。接地体112の帯状部123の下端部123cの幅Hcは、ユニット本体110の車幅方向の幅Hよりも狭く形成されている。また、接地体112の帯状部123の下端部123cは、車幅方向において、ブラケット101の中央に配置されている。
取付部124は、帯状部123の上端部123bの縁に連なっている。接地体112の取付部124には、ボス部116内に軸心P2回りに回転自在に設けられた第2回転軸125が固定されている。第2回転軸125がボス部116内に通されることで、接地体112は、ユニット本体110の後部に対して軸心P2回りに上下回転自在に取り付けられる。
また、第2回転軸125の先端には、ユニット本体110のケース体113内に収容される規制部材126(図6に示す)が固定されている。規制部材126は、ユニット本体110が下降限界位置に位置付けられて接地体112の上下両端部123b,123cが鉛直方向に並ぶ位置(図3に示す)に位置付けられると、ユニット本体110のケース体113の内面に当接する。そして、規制部材126は、ユニット本体110のケース体113の内面に当接することで、ユニット本体110が下降限界位置に位置付けられて接地体112の上下両端部123b,123cが鉛直方向に並ぶ位置(図3に示す)よりも、接地体112の下端部123cが後方に向かう方向に、接地体112が軸心P2回りに回転することを規制する。
このために、接地体112は、図3に示す上下両端部123b,123cが鉛直方向に並ぶ位置から、下端部123cが前方に向かう方向のみに軸心P2回りに回転することができる。また、接地体112は、図3に示す上下両端部123b,123cが鉛直方向に並ぶ位置から、下端部123cが前方に向かう方向に軸心P2回りに回転すると、図11(d)に示すように、接地体112の帯状部123の中央部123aに設けられた屈曲部が凹み117内に侵入して、凹み117の内面に当接する。このように、接地体112は、図3に示す上下両端部123b,123cが鉛直方向に並ぶ位置と、図11(d)に示す中央部123aが凹み117内に侵入する位置とに亘って、ユニット本体110に対して軸心P2回りに回転する。
また、ユニット本体110内には、図7に示すように、第2のトルクばね127(第2付勢手段に相当)が収容されている。第2のトルクばね127は、ユニット本体110のケース体113のボス部116の外周に取り付けられ、一端部がケース体113の内面に当接し、他端部が規制部材126に取り付けられている。第2のトルクばね127は、一端部がケース体113の内面に当接し、他端部が規制部材126に取り付けられていることで、下端部123cが後方に向かうように、図3に示す上下両端部123b,123cが鉛直方向に並ぶ位置に向って、ユニット本体110に対して接地体112を付勢する。
また、接地体112は、ユニット本体110が上昇限界位置に位置付けられると、図4に示すように、下方フレーム57に下端部123c又は上端部123bが当接し第2のトルクばね127の付勢力に抗して押圧されて、軸心P2回りに若干回転する。そして、接地体112は、ユニット本体110が軸心P1回りに上昇限界位置まで上方回転した状態において、接地体112の下端部123cの先端即ち下端の高さが、分草体51の下端部の高さ以上となる構成としている。本実施形態では、接地体112は、ユニット本体110が上昇限界位置まで上方回転した状態において、下端部123cの先端即ち下端が、分草体51の下端部よりも高い。
次に、前述した構成のセンサユニット100の動作を、図面に基いて説明する。図10は、実施形態に係るコンバインの機体前進時のセンサユニットの動作を示す説明図、図11は、実施形態に係るコンバインの機体後進時のセンサユニットの動作を示す説明図である。
前述した構成のセンサユニット100は、接地体112にいかなるものも当接しない状態では、第1のトルクばね122及び第2のトルクばね127の付勢力により、ユニット本体110が下降限界位置に位置付けられ、図10(a)に示すように、接地体112の下端部123cが分草体51よりも下方に突出する。ここで、接地体112は、図10(a)に示す位置から軸心P2まわりに、下端部123cが前方に向う方向にのみ回転することが許容され、後方に向かう方向の回転が規制されている。
このために、コンバイン1の機体前進時には、接地体112の下端部123cが地面Gや切り株に当接すると、これらの地面Gや切り株から押圧されて、接地体112とセンサユニット100とが一体となって、図10(b)〜図10(g)に示すように、軸心P1回りに上昇限界位置に向って上下回転する。そして、センサユニット100は、ポテンショメータ111が軸心P1回りのブラケット101に対する回転位置を検出して、分草体51の地面Gからの高さを検出する。センサユニット100は、検出結果をコンバイン1全体の制御を司る制御装置(図示せず)に出力する。そして、この制御装置は、ポテンショメータ111の検出結果から算出される分草体51の地面Gからの高さを一定にするように、前述の昇降シリンダを作動させ、刈取装置5の高さを変更する。
また、コンバイン1の機体後進時には、接地体112の下端部123cが地面Gや切り株に当接すると、これらの地面Gや切り株から押圧されて、まず、図11(a)〜図11(c)に示すように、接地体112がユニット本体110に対して下端部123cが前方に向うように軸心P2回りに回転する。また、図11(c)に示すように、接地体112の中央部123aが凹み117に侵入して凹み117の内面に当接した状態で、接地体112が切り株などから上方に押圧されると、接地体112とセンサユニット100とが一体となって、図11(d)に示すように、軸心P1回りに上昇限界位置に向って回転する。このとき、接地体112の下端の高さが分草体51の先端の高さ以上であるので、接地体112に地面が干渉することなく、接地体112がユニット本体110と一体に回転することができる。
上記のように構成されるコンバイン1は、エンジン3が発生させる駆動力によって走行装置4が駆動して走行しながら刈取装置5によって穀稈を刈り取る。このとき、刈取装置5は、分草体51により分草し、引起装置52により引き起こして、穀稈を刈刃53で刈り取る。そして、コンバイン1は、刈取装置5で刈り取った穀稈を搬送装置56によって脱穀装置10の脱穀部7に搬送する。そして、コンバイン1は、フィードチェーン駆動機構9が穀稈を後方に搬送しながら、脱穀部7にてエンジン3から伝達される駆動力によって穀稈を脱穀する。脱穀された穀粒等は、選別部6に落下する。そして、コンバイン1は、選別部6にて穀粒を選別し、選別した穀粒をグレンタンク8に貯蔵する。
以上で説明した実施形態に係るコンバイン1によれば、接地体112が機体後進時に地面Gから押圧されることで、下端部123cが前方に向うように軸心P2回りに回転自在にユニット本体110に取り付けられている。このために、機体前進時には、接地体112が地面Gから押圧されても前方に向うようにユニット本体110に対して回転することができないために、地面Gから接地体112を押圧する力がユニット本体110に伝わることとなる。したがって、機体前進時には、接地体112が地面Gから押圧されると、接地体112と一体にユニット本体110が軸心P1回りに上下回転する。よって、機体前進時に、接地体112だけでなくユニット本体110も地面Gから離間することとなるので、切り株などがユニット本体110に衝突して破損することを抑制することができる。
また、機体後進時には、接地体112が地面Gや切り株に接触すると、ユニット本体110が軸心P1回りに回転する前に、最初に、接地体112が軸心P2回りに回転する。このために、機体後進時に、接地体112を回転させるのに必要とされる力を抑制することができる。よって、機体後進時に、接地体112を地面Gから確実に離間させることができ、接地体112などが破損してしまうことを抑制することができる。
また、コンバイン1によれば、接地体112をユニット本体110の後部に取り付けているので、接地体112がユニット本体110に対して機体フレーム2の前方に向うように軸心P2回りに回転自在にユニット本体110に取り付けることができる。このために、機体前進時に、接地体112と一体にユニット本体110が切り株から離れる方向に軸心P1回りに回転させることができ、切り株などがユニット本体110に衝突して破損することを抑制することができる。
また、コンバイン1によれば、下降限界位置まで下方回転した状態において、軸心P2が軸心P1よりも下方に位置するので、接地体112が下方に突出し易くなり、地面Gに接触し易い。したがって、刈取装置5の分草体51の地面Gからの高さを確実に検出することができる。
また、下降限界位置では、接地体112が下方に突出するので、機体後進時には、接地体112が地面Gから押圧されて、下端部123cが前方に向かうように軸心P2回りに確実に回転する。したがって、機体後進時に、接地体112が破損することを確実に抑制することができる。
また、コンバイン1によれば、上昇限界位置まで上方回転した状態において、接地体112の下端の高さが分草体51の下端部の高さ以上であるので、機体前進時に接地体112に切り株などが接触できない位置まで接地体112とユニット本体110とを一体に回転させることができる。したがって、接地体112に切り株などが接触した際に、接地体112とユニット本体110とを確実に一体に回転させることができ、接地体112の破損を抑制することができる。
また、上昇限界位置では、接地体112の下端の高さが分草体51の下端部の高さ以上であるので、機体後進時には、接地体112をユニット本体110に接触するまで軸心P2回りに回転させることができる。
また、コンバイン1によれば、前進及び機体後進時に切り株などが接地体112を上方に押圧しても、接地体112の中央部123aにく字状に屈曲した屈曲部を形成しているので、押圧した力が接地体112とともにユニット本体110を軸心P1回りに回転させることとなる。したがって、切り株などが接地体112を上方に押圧しても、ユニット本体110が切り株などから離れる方向に回転して、切り株に接触するなどして破損することを抑制することができる。
また、コンバイン1によれば、接地体112の下端部123cの幅Hcが中央部123aの幅Haよりも広いので、万が一、回転可能な範囲を超えて、軸心P1,P2回りに回転させる力が接地体112に作用しても、当該力が接地体112の中央部123aに集中して、中央部123aを破損させることとなる。このために、万が一、回転可能な範囲を超えて、軸心P1,P2回りに回転させる力が接地体112に作用しても、ユニット本体110を破損させることなく、接地体112を破損させることとなるので、万が一に破損した際の修復作業を容易に行うことができる。
また、コンバイン1によれば、ユニット本体110の下面110aに接地体112の中央部123aに形成された屈曲部が侵入可能な凹み117が設けられているので、特に、機体後進時に、凹み117に中央部123aに形成された屈曲部が侵入するまで、接地体112を軸心P2回りに前方に回転させることができる。したがって、機体後進時に、接地体112を切り株などから確実に退避させることができ、接地体112などが破損することを抑制することができる。
また、コンバイン1によれば、接地体112の下端部123cの幅Hcをユニット本体110の幅Hよりも狭くして、接地体112を地面Gを検出するために必要な最小限の幅にしている。このために、接地体112による刈り取り前の穀稈の押し倒しを抑制することができ、刈跡を良好なものとすることができる。
また、コンバイン1によれば、ポテンショメータ111が軸心P1と軸心P2とを結ぶ仮想線L1よりも上側の部位に設けられているので、ポテンショメータ111を地面Gから極力離すことができる。したがって、圃場の泥や刈り取り前の穀稈がポテンショメータ111に接触することを抑制して、ポテンショメータ111が破損することを抑制できるとともに、機体前進時の走行抵抗を抑制することができる。
また、コンバイン1によれば、ポテンショメータ111をブラケット101の外側面104aよりも刈幅方向の内側に配置しているので、圃場の泥や刈り取り前の穀稈がポテンショメータ111に接触することを抑制して、ポテンショメータ111が破損することを抑制できるとともに、機体前進時の走行抵抗を抑制することができる。
また、コンバイン1によれば、ポテンショメータ111を前後方向の軸心P1と軸心P2との間の部位に配置しているので、ポテンショメータ111が取り付けられるユニット本体110が大型化することを抑制することができる。よって、センサユニット100自体の大型化を抑制することができる。
また、コンバイン1によれば、ブラケット101には、分草体51に取り付けられる取付部103と、取付部103から後方へ向けて延出されてユニット本体110が取り付けられたユニット取付部104を有している。このために、圃場の泥や刈り取り前の穀稈がブラケット101に引っ掛かることを抑制することができる。したがって、機体前進時の走行抵抗を抑制することができる。
また、コンバイン1によれば、ブラケット101が側面視において、へ字状に形成されているので、ブラケット101の地面Gとのクリアランスを確保することができる。このために、機体前進時にブラケット101による刈り取り前の穀稈の押し倒しを抑制することができ、刈跡を良好なものとすることができる。
また、コンバイン1によれば、ブラケット101の中央部よりも後方の部位であるユニット取付部104の下縁を地面Gに平行に形成しているので、機体前進時に、接地体112とともにユニット本体110が軸心P1回りに回転すると、刈り取り前の穀稈や切り株などがユニット取付部104に接触することとなる。このとき、ユニット取付部104が地面Gと平行であるので、穀稈の押し倒しを抑制することができるとともに、穀稈や切り株のブラケット101に対する摩擦抵抗を最小限とすることができる。
また、コンバイン1によれば、ブラケット101のユニット取付部104に軸心P1を設け、軸心P2を軸心P1よりも後方に配置している。このために、機体前進時に、接地体112などが株割りしたときや地面Gに突っ込んだときにも、接地体112とユニット本体110とが一体となって軸心P1回りに回転することができる。また、機体後進時に、ユニット本体110に対して軸心P2回りに回転した接地体112が切り株などから上方に押圧されても、接地体112とユニット本体110とが一体となって軸心P1回りに回転することができる。よって、接地体112とユニット本体110の破損を抑制することができる。
また、コンバイン1によれば、ブラケット101に第1規制突起105と第2規制突起106とを設けて、ユニット本体110の軸心P1回りの回転可能な範囲を規制している。したがって、ユニット本体110が、回転可能な範囲を超えて回転することを抑制でき、ユニット本体110などの破損を抑制することができる。
また、コンバイン1によれば、軸心P1回りに回転自在にユニット本体110を取り付ける第1回転軸107に、ポテンショメータ111の検出アーム119に係合するセンサーアーム108を固定している。このために、ユニット本体110が軸心P1回りに回転すると、検出アーム119が確実に回転することとなり、ポテンショメータ111がユニット本体110の軸心P1回りの回転位置を確実に検出することができる。
また、コンバイン1によれば、軸心P1とポテンショメータ111の検出アーム119の回転中心である検出軸118の軸心とを結んだ仮想線Lよりも、係合部121を上方に配置しているので、ユニット本体110の軸心P1寄りの上下方向の厚みH1(図10に示す)よりも離間部110bの上下方向の厚みH2(図10に示す)を小さくすることができる。よって、軸心P1回りにユニット本体110が回転した際の軌跡を小さくすることができ、刈取装置5全体の小型化を図ることができる。
下降限界位置に向ってユニット本体110を付勢する第1のトルクばね122をユニット本体110のケース体113内に設けているので、接地体112に何も接触していない状態では、ユニット本体110は、下降限界位置に位置付けられる。したがって、接地体112が地面Gに確実に接触でき、刈取装置5の地面Gからの高さを確実に検出することができる。また、下降限界位置に向ってユニット本体110を付勢する第1のトルクばね122を設けているので、地面Gから押圧された接地体112が、第1のトルクばね122の付勢力により地面Gに押付けられることとなる。したがって、接地体112が、ユニット本体110とともに軸心P1回りに回転しても、極力地面Gに接触するように、追従することとなり、刈取装置5の地面Gからの高さを正確に検出することができる。
また、コンバイン1によれば、接地体112の下端部123cが後方に向うように接地体112を付勢する第2のトルクばね127を設けているので、機体前進時に接地体112に切り株や穀稈が接触すると、接地体112と一体にユニット本体110が軸心P1回りに確実に回転する。したがって、ユニット本体110などの破損を確実に抑制することができる。
また、コンバイン1によれば、接地体112に固定された第2回転軸125に、接地体112の上下両端部123b,123cが鉛直方向に並ぶ位置よりも、下端部123cが機体フレームの後方に向かうように接地体112が回転することを規制する規制部材126を固定している。したがって、簡便な構成で、接地体112の回転可能な範囲を規制することができる。
なお、上述した本発明の実施形態に係るコンバインは、上述した実施形態に限定されず、特許請求の範囲に記載された範囲で種々の変更が可能である。