JP5647108B2 - 粒子検出システムおよび粒子検出器を用いた粒子検出方法 - Google Patents
粒子検出システムおよび粒子検出器を用いた粒子検出方法 Download PDFInfo
- Publication number
- JP5647108B2 JP5647108B2 JP2011512783A JP2011512783A JP5647108B2 JP 5647108 B2 JP5647108 B2 JP 5647108B2 JP 2011512783 A JP2011512783 A JP 2011512783A JP 2011512783 A JP2011512783 A JP 2011512783A JP 5647108 B2 JP5647108 B2 JP 5647108B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- receiver
- wavelengths
- light source
- received
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000002245 particle Substances 0.000 title claims description 148
- 238000001514 detection method Methods 0.000 title claims description 82
- 238000000034 method Methods 0.000 claims description 50
- 230000008859 change Effects 0.000 claims description 23
- 238000012545 processing Methods 0.000 claims description 18
- 230000008569 process Effects 0.000 claims description 16
- 238000005259 measurement Methods 0.000 claims description 12
- 230000005540 biological transmission Effects 0.000 claims description 5
- 230000001360 synchronised effect Effects 0.000 claims description 4
- 239000000779 smoke Substances 0.000 description 92
- 230000007246 mechanism Effects 0.000 description 50
- 238000005286 illumination Methods 0.000 description 35
- 230000003287 optical effect Effects 0.000 description 25
- 230000000875 corresponding effect Effects 0.000 description 23
- 230000004044 response Effects 0.000 description 20
- 238000012544 monitoring process Methods 0.000 description 17
- 230000006870 function Effects 0.000 description 15
- 238000010586 diagram Methods 0.000 description 14
- 238000003384 imaging method Methods 0.000 description 11
- 238000009434 installation Methods 0.000 description 10
- 230000002829 reductive effect Effects 0.000 description 9
- 238000004891 communication Methods 0.000 description 7
- 239000013618 particulate matter Substances 0.000 description 7
- 230000000694 effects Effects 0.000 description 6
- 230000005855 radiation Effects 0.000 description 6
- 230000035945 sensitivity Effects 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 230000002238 attenuated effect Effects 0.000 description 5
- 230000010354 integration Effects 0.000 description 5
- 238000001228 spectrum Methods 0.000 description 5
- 238000007689 inspection Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 230000000670 limiting effect Effects 0.000 description 3
- 230000033001 locomotion Effects 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 238000009833 condensation Methods 0.000 description 2
- 230000005494 condensation Effects 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000005670 electromagnetic radiation Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 229920000742 Cotton Polymers 0.000 description 1
- 241000238631 Hexapoda Species 0.000 description 1
- SOZVEOGRIFZGRO-UHFFFAOYSA-N [Li].ClS(Cl)=O Chemical compound [Li].ClS(Cl)=O SOZVEOGRIFZGRO-UHFFFAOYSA-N 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000002274 desiccant Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000011900 installation process Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000011410 subtraction method Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images
































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/47—Scattering, i.e. diffuse reflection
- G01N21/49—Scattering, i.e. diffuse reflection within a body or fluid
- G01N21/53—Scattering, i.e. diffuse reflection within a body or fluid within a flowing fluid, e.g. smoke
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/02—Investigating particle size or size distribution
- G01N15/0205—Investigating particle size or size distribution by optical means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/02—Investigating particle size or size distribution
- G01N15/0205—Investigating particle size or size distribution by optical means
- G01N15/0227—Investigating particle size or size distribution by optical means using imaging; using holography
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N15/1434—Optical arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/47—Scattering, i.e. diffuse reflection
- G01N21/49—Scattering, i.e. diffuse reflection within a body or fluid
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/47—Scattering, i.e. diffuse reflection
- G01N21/49—Scattering, i.e. diffuse reflection within a body or fluid
- G01N21/53—Scattering, i.e. diffuse reflection within a body or fluid within a flowing fluid, e.g. smoke
- G01N21/538—Scattering, i.e. diffuse reflection within a body or fluid within a flowing fluid, e.g. smoke for determining atmospheric attenuation and visibility
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V8/00—Prospecting or detecting by optical means
- G01V8/10—Detecting, e.g. by using light barriers
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B17/00—Fire alarms; Alarms responsive to explosion
- G08B17/10—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means
- G08B17/103—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means using a light emitting and receiving device
- G08B17/107—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means using a light emitting and receiving device for detecting light-scattering due to smoke
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/06—Illumination; Optics
- G01N2201/062—LED's
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/06—Illumination; Optics
- G01N2201/062—LED's
- G01N2201/0621—Supply
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/06—Illumination; Optics
- G01N2201/062—LED's
- G01N2201/0627—Use of several LED's for spectral resolution
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/06—Illumination; Optics
- G01N2201/063—Illuminating optical parts
- G01N2201/0633—Directed, collimated illumination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2201/00—Features of devices classified in G01N21/00
- G01N2201/06—Illumination; Optics
- G01N2201/069—Supply of sources
- G01N2201/0696—Pulsed
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B17/00—Fire alarms; Alarms responsive to explosion
- G08B17/10—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means
- G08B17/11—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means using an ionisation chamber for detecting smoke or gas
- G08B17/113—Constructional details
Landscapes
- Chemical & Material Sciences (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Analytical Chemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Immunology (AREA)
- General Health & Medical Sciences (AREA)
- Biochemistry (AREA)
- Health & Medical Sciences (AREA)
- Pathology (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Dispersion Chemistry (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geophysics (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Fire-Detection Mechanisms (AREA)
Description
光源は、個々の波長において光を放射するように構成された1つ以上の発光体を含むことができる。光源は、単一の波長または複数の波長で発光することができる。
監視対象領域を横切った後の少なくとも第1および第2の波長の光を受信し、少なくとも第1および第2の波長の受信光の強度を表わす信号を生成するステップと、
少なくとも第1および第2の波長での受信光の強度を表わす信号を処理し、対象の粒子が前記監視対象領域において検出されたか否かを表わす出力を提供するステップと、を含む方法を提供する。
前記少なくとも2つの波長における受信光の相対強度に基づいて、少なくとも1つの第1の粒子検出基準が満足されるか否かを判断するステップと、
少なくとも1つの波長における受信光レベルに基づいて、少なくとも1つの第2の粒子検出基準が満足されるか否かを判断するステップと、を含む方法を提供する。
第1のビーム検出器を使用して粒子を検出し、
粒子が少なくとも1つの他のビーム検出器によって検出されたか否かを判断し、
該判断ならびに、前記第1のビーム検出器および前記少なくとも1つの他のビーム検出器の相対位置に基づいて、検出された粒子の位置を決定するように構成されている。
1つ以上の第1の波長での光を放射し、監視対象領域の少なくとも一部を照明するように構成された遠方照明手段と、
1つ以上の第2の波長での光を放射し、監視対象領域の少なくとも一部を照明するように構成された第2の照明手段と、
前記第2の照明手段と実質的に同じ位置に配置され、第1および第2の波長の放射光の一部を監視対象領域を横切った後で受信するように構成された受信機と、
前記受信機から遠方に配置され、前記第2の照明手段から放射された光を前記受信機へ反射するように構成された反射器と、を備える粒子検出器が提供される。
前記重なり合う光ビームのうちの第1のビームを第1の変調機構で変調するステップと、
前記重なり合う光ビームのうちの第2のビームを、前記第1の変調機構とは区別可能な第2の変調機構で変調するステップと、
前記光源から光を受信するステップと、
受信された光において検出される変調機構に基づいて前記光源と前記受信機との相対アライメントを判断するステップと、を含む方法。
前記光源の発光を所定の変調機構に従って変調するステップと、
所定の状態が前記光源に存在する場合、前記変調機構を変化させるステップと、
前記受信機によって受信された光において前記変調機構の変化を検出するステップと、を含む方法。
全体領域を観察するには不充分な視野を有する受信機を用意するステップと、
受信機に向かって前記領域を横切って投射される複数のビームを形成するステップと、
受信機の視野の向きを変化させて、複数のビームを監視するステップと、
各々の受信ビームから受信される光の各々のレベルに基づいて、前記領域において粒子が存在するか否かを判断するステップと、を含む方法。
遠方照明手段を使用して、監視対象領域の少なくとも一部を照明するステップと、
前記遠方照明手段による放射の少なくとも一部を監視対象領域を横切った後で受信するステップと、を含み、
さらに、前記受信光レベルが少なくとも1つの所定の基準を満たす場合には、
第2の照明手段を使用して監視対象領域の少なくとも一部を照明するステップと、
第2の波長において放射された光の少なくとも一部を監視対象領域を横切った後で受信するステップと、
一方または両方の波長の受信信号に基づいて、監視対象領域に粒子が存在するか否かを判断するステップと、を含む方法を提供する。
それぞれの方向に光ビームを投射するように配置された複数の発光素子と、
前記発光素子のうちの1つ以上を選択的に発光させるための手段と、を備え、
少なくとも1つの選択された方向に投射するように構成できる光源を提供する。
光ビームの所望の投射方向を決定するステップと、
前記所望の方向に光ビームを投射する1つ以上の発光素子を選択的に発光させるステップと、を含む方法。

・フレーム0および3は、Syncパルスの背景打ち消しに使用される。
・フレーム4および6は、IRパルスの背景打ち消しに使用される。
・フレーム6および8は、UVパルスの背景打ち消しに使用される。
・フレーム8および10は、Dataパルスの背景打ち消しに使用される。
上述のように、受信機は、送信された各々のパルスを、画像フレーム内の1つ以上の画素の形態で受信する。
・受信したフレーム0から開始してフレームnにおいて、可能性のある送信機信号を検査する。
・最初に、「オフフレーム」基準レベルを計算する。
I0=(lR(n+0)+IR(n+3)+IR(n+4)+IR(n+6)+IR(n+8))/5 {「オフフレーム」の平均}
・相対強度を計算する。
m=0〜8について、IR(n+m)=l(n+m)-I0
・所定の閾値と比較して、各フレームにおいて送信機パルスの有無を判断する。
Found={(lR(n+1)>ION) or (lR(n+2)>ION)} and {Sync1 or Sync2 pulse}
(IR(n+5)>ION) and {IR pulse}
(IR(n+7)>ION) and {UV pulse}
(lR(n+0)<IOFF) and {off frame}
(lR(n+3)<IOFF) and {off frame}
(lR(n+4)<IOFF) and {off frame}
(lR(n+6)<IOFF) and {off frame}
(lR(n+8)<IOFF) and {off frame}
Claims (16)
- 少なくとも2つの波長において監視対象の空間を照射するように構成された少なくとも1つの光源と、
視野を有し、少なくとも1つの光源からの光を監視対象の空間を横切った後で受信するように構成され、視野内の複数の領域において受信された光の強度を表わす信号を生成するように構成された受信機と、
受信機と接続され、受信機によって生成された信号を処理し、受信機の視野内の対応する領域において少なくとも2つの波長にて受信された光を相関付けて、2つの波長における受信された光の相対レベルを表わす出力を生成するように構成されたプロセッサと、を備える粒子検出システム。 - 受信機は、複数のセンサ素子を有するセンサを備え、各センサ素子が、受信機の視野内の個々の領域からの光を受信する請求項1に記載の粒子検出システム。
- 光源が、個々の波長において光を放射するように構成された1つ以上の発光体を含むことができる請求項1または2に記載の粒子検出システム。
- 光源が、異なる時点において、該少なくとも2つの波長の各々にて監視対象の空間を照射するように構成されている請求項1〜3のいずれかに記載の粒子検出システム。
- プロセッサは、受信機の視野内の同じ領域において受信された一対以上の波長における受信光の相対的掩蔽を決定し、該相対的掩蔽に基づいて監視対象の空間の粒子の存在を表わす出力を生成するように構成されている請求項1〜4のいずれかに記載の粒子検出システム。
- 監視対象空間内の対象の粒子を検出するように構成された、請求項1〜5のいずれかに記載の粒子検出システムであって、
少なくとも2つの波長は、対象の粒子による影響を比較的受けない少なくとも第1の波長と、少なくとも該粒子によって影響される少なくとも第2の波長とを含み、
第1および第2の波長の少なくとも一方における受信機の出力を処理し、前記監視対象領域に対象の粒子が検出されるか否かを表わす出力を提供するように構成されたプロセッサと、を備える粒子検出システム。 - プロセッサは、一方または両方の波長における受信光レベルに基づいて決定される第2の警報条件を適用するように構成されている請求項1〜6のいずれかに記載の粒子検出システム。
- 第2の警報条件は、光の相対強度の変化が第1の警報条件を満足させない前提条件に基づいている請求項7に記載の粒子検出システム。
- 光源は、電池で駆動される請求項1〜8のいずれかに記載の粒子検出システム。
- 互いに同期していない少なくとも2つの光源を備える請求項1〜9のいずれかに記載の粒子検出システム。
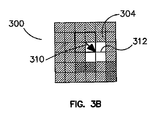
- 受信機は、複数の画素を備えたセンサを有するカメラを含み、
個々の光源に対応した受信機の領域は、該センサの複数の画素の部分集合を含む1〜10のいずれかに記載の粒子検出システム。 - 粒子検出器を用いた粒子検出方法であって、
第1および第2の波長を含む光であって、第1の波長は監視対象領域を横切る透過が対象の粒子の影響を比較的受けない波長であり、第2の波長は監視対象領域を横切る透過が対象の粒子によって影響を受ける波長である光を、監視対象領域に放射するステップと、
監視対象領域を横切った後の少なくとも第1および第2の波長の光を受信し、少なくとも第1および第2の波長の受信光の強度を表わす信号を生成するステップと、
少なくとも第1および第2の波長での受信光の強度を表わす信号を処理し、対象の粒子が前記監視対象領域において検出されたか否かを表わす出力を提供するステップと、を含む方法。 - 少なくとも第1および第2の波長での受信光の強度を表わす信号を処理するステップは、第1および第2の波長での受信光の相対強度の変化に基づいている請求項12に記載の方法。
- 第1および第2の波長の受信光での相対強度が実質的に安定な状態であるが、1つ以上の波長の受信光の絶対強度が1つ以上の所定の基準を満たした場合、前記監視対象領域の対象の粒子の存在を示す出力を生成するステップ、を含む請求項12または13に記載の方法。
- 請求項12〜14のいずれかに記載の粒子検出器における方法であって、
少なくとも1つの光源が受信機を照射するように、光源および受信機の少なくとも1つを近似的に整列させるステップと、
光源に対応する受信光強度測定値を決定するために使用される光源に対応する、受信機の視野内の空間位置を選択するステップと、を含む方法。 - システムの幾何配置が変化するときに、光源に対応する領域を時間とともに追跡するステップ、を含む請求項15に記載の方法。
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2008902909A AU2008902909A0 (en) | 2008-06-10 | Particle detection | |
| AU2008902909 | 2008-06-10 | ||
| AU2008903268A AU2008903268A0 (en) | 2008-06-26 | Particle detection | |
| AU2008903269A AU2008903269A0 (en) | 2008-06-26 | Particle detection | |
| AU2008903269 | 2008-06-26 | ||
| AU2008903270A AU2008903270A0 (en) | 2008-06-26 | Particle detection | |
| AU2008903270 | 2008-06-26 | ||
| AU2008903268 | 2008-06-26 | ||
| AU2009901923 | 2009-05-01 | ||
| AU2009901923A AU2009901923A0 (en) | 2009-05-01 | Partical detector, processor management and acquisition | |
| PCT/AU2009/000727 WO2009149498A1 (en) | 2008-06-10 | 2009-06-10 | Particle detection |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014225974A Division JP2015072278A (ja) | 2008-06-10 | 2014-11-06 | 粒子の検出 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011523065A JP2011523065A (ja) | 2011-08-04 |
| JP2011523065A5 JP2011523065A5 (ja) | 2012-07-26 |
| JP5647108B2 true JP5647108B2 (ja) | 2014-12-24 |
Family
ID=41416276
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011512783A Expired - Fee Related JP5647108B2 (ja) | 2008-06-10 | 2009-06-10 | 粒子検出システムおよび粒子検出器を用いた粒子検出方法 |
| JP2014225974A Pending JP2015072278A (ja) | 2008-06-10 | 2014-11-06 | 粒子の検出 |
| JP2017192640A Expired - Fee Related JP6517297B2 (ja) | 2008-06-10 | 2017-10-02 | 粒子の検出 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014225974A Pending JP2015072278A (ja) | 2008-06-10 | 2014-11-06 | 粒子の検出 |
| JP2017192640A Expired - Fee Related JP6517297B2 (ja) | 2008-06-10 | 2017-10-02 | 粒子の検出 |
Country Status (10)
| Country | Link |
|---|---|
| US (4) | US8804119B2 (ja) |
| EP (2) | EP3885743A1 (ja) |
| JP (3) | JP5647108B2 (ja) |
| KR (3) | KR101947004B1 (ja) |
| CN (3) | CN102112867B (ja) |
| AU (3) | AU2009257179B2 (ja) |
| CA (2) | CA2959377C (ja) |
| HK (1) | HK1217764A1 (ja) |
| MY (2) | MY162695A (ja) |
| WO (1) | WO2009149498A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020038203A (ja) * | 2018-08-21 | 2020-03-12 | ヴァイアヴィ・ソリューションズ・インコーポレイテッドViavi Solutions Inc. | マルチスペクトルセンサベースの警報条件検知器 |
Families Citing this family (72)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2003902319A0 (en) | 2003-05-14 | 2003-05-29 | Garrett Thermal Systems Limited | Laser video detector |
| WO2006050570A1 (en) * | 2004-11-12 | 2006-05-18 | Vfs Technologies Limited | Particle detector, system and method |
| KR101705220B1 (ko) | 2007-11-15 | 2017-02-09 | 엑스트랄리스 테크놀로지 리미티드 | 입자 검출 |
| WO2009149498A1 (en) | 2008-06-10 | 2009-12-17 | Xtralis Technologies Ltd | Particle detection |
| TWI600891B (zh) | 2009-05-01 | 2017-10-01 | 愛克斯崔里斯科技有限公司 | 微粒偵測技術(一) |
| EP2589025A2 (fr) * | 2010-07-01 | 2013-05-08 | Thomson Licensing | Procede d'estimation de diffusion de la lumiere |
| WO2012032955A1 (ja) * | 2010-09-10 | 2012-03-15 | オリンパス株式会社 | 複数の波長帯域の光計測を用いた光分析方法 |
| EP2631631B1 (en) * | 2010-11-25 | 2016-01-20 | Olympus Corporation | Photometric analysis device and photometric analysis method using wavelength characteristic of light emitted from single illuminant particle |
| EP2487480B1 (en) * | 2011-02-09 | 2014-01-15 | ABB Technology AG | Optical sensor element and optical sample analysing apparatus |
| CN104270582B (zh) * | 2011-03-03 | 2017-08-22 | 原相科技股份有限公司 | 图像传感器 |
| JP5713862B2 (ja) * | 2011-09-29 | 2015-05-07 | 能美防災株式会社 | 光電式分離型煙感知器 |
| DE102011083939B4 (de) | 2011-09-30 | 2014-12-04 | Siemens Aktiengesellschaft | Auswerten von Streulichtsignalen bei einem optischen Gefahrenmelder und Ausgeben sowohl eines gewichteten Rauchdichtesignals als auch eines gewichteten Staub-/Dampfdichte-Signals |
| KR101984504B1 (ko) * | 2012-02-29 | 2019-09-03 | 삼성전자주식회사 | 정밀한 3차원 위치 및 방향을 추정하는 시스템 및 방법 |
| DE102012102395B3 (de) * | 2012-03-21 | 2013-01-03 | Sick Ag | Optoelektronischer Sensor und Verfahren zum Testen der Lichtdurchlässigkeit einer Frontscheibe |
| US8786835B1 (en) * | 2012-03-26 | 2014-07-22 | Lockheed Martin Corporation | System, apparatus and method for detecting presence and range of an object |
| US9140646B2 (en) | 2012-04-29 | 2015-09-22 | Valor Fire Safety, Llc | Smoke detector with external sampling volume using two different wavelengths and ambient light detection for measurement correction |
| US9835549B1 (en) * | 2012-04-29 | 2017-12-05 | Valor Fire Safety, Llc | System and method of smoke detection using multiple wavelengths of light and multiple sensors |
| US8907802B2 (en) | 2012-04-29 | 2014-12-09 | Valor Fire Safety, Llc | Smoke detector with external sampling volume and ambient light rejection |
| US8947244B2 (en) | 2012-04-29 | 2015-02-03 | Valor Fire Safety, Llc | Smoke detector utilizing broadband light, external sampling volume, and internally reflected light |
| US9915609B1 (en) | 2012-04-29 | 2018-03-13 | Valor Fire Safety, Llc | System and method of smoke detection using multiple wavelengths of light |
| JP6008577B2 (ja) * | 2012-05-23 | 2016-10-19 | 三菱重工業株式会社 | 濃度測定装置及び脱硝装置 |
| GB2513366B (en) * | 2013-04-24 | 2015-04-01 | Fire Fighting Entpr Ltd | Improvements in or relating to optical beam detectors |
| WO2015008435A1 (ja) * | 2013-07-17 | 2015-01-22 | パナソニックIpマネジメント株式会社 | 分光装置 |
| KR20160079057A (ko) * | 2013-10-30 | 2016-07-05 | 발로르 파이어 세이프티, 엘엘씨 | 외부 샘플링 볼륨 및 주변광 배제를 갖는 연기 감지기 |
| DE102014001704B4 (de) * | 2014-02-08 | 2023-08-10 | Dräger Safety AG & Co. KGaA | Gasdetektionsvorrichtung |
| US10685545B2 (en) * | 2014-05-22 | 2020-06-16 | Carrier Corporation | Wide-area chamberless point smoke detector |
| JP6543127B2 (ja) * | 2014-07-31 | 2019-07-10 | ホーチキ株式会社 | 火災検知装置及び火災検知方法 |
| CA2957546A1 (en) | 2014-08-08 | 2016-02-11 | Quantum-Si Incorporated | Integrated device with external light source for probing, detecting, and analyzing molecules |
| JP6583725B2 (ja) * | 2014-09-17 | 2019-10-02 | パナソニックIpマネジメント株式会社 | 物質検知装置 |
| US9677986B1 (en) * | 2014-09-24 | 2017-06-13 | Amazon Technologies, Inc. | Airborne particle detection with user device |
| KR20160061492A (ko) * | 2014-11-21 | 2016-06-01 | 삼성디스플레이 주식회사 | 휴대용 먼지 센서 및 이를 이용한 휴대전화 |
| EP3029646B1 (de) * | 2014-12-01 | 2019-01-30 | Siemens Schweiz AG | Streulichtrauchmelder mit einer zweifarbigen Leuchtdiode |
| KR101675434B1 (ko) * | 2015-01-15 | 2016-11-14 | (주)신성이엔지 | 휴대용 파티클 디텍터 |
| US10067234B2 (en) * | 2015-02-17 | 2018-09-04 | Honeywell International Inc. | Projected beam detector with imaging device |
| US10395498B2 (en) | 2015-02-19 | 2019-08-27 | Smoke Detective, Llc | Fire detection apparatus utilizing a camera |
| US10304306B2 (en) | 2015-02-19 | 2019-05-28 | Smoke Detective, Llc | Smoke detection system and method using a camera |
| JP6523840B2 (ja) * | 2015-07-16 | 2019-06-05 | 株式会社堀場製作所 | ガス成分検出装置 |
| DE102015009938B4 (de) * | 2015-07-30 | 2022-02-03 | Diehl Aviation Gilching Gmbh | Beheizbarer Rauchmelder |
| CN105136637B (zh) * | 2015-09-17 | 2017-10-17 | 深圳代尔夫特电子科技有限公司 | 用于检测空气中的颗粒物的传感器及其制造方法 |
| JP6321063B2 (ja) * | 2016-02-29 | 2018-05-09 | 能美防災株式会社 | 火災監視システム及び煙感知器 |
| CN105841733B (zh) * | 2016-04-15 | 2018-09-11 | 中煤科工集团重庆研究院有限公司 | 火灾爆炸用光学传感器测试装置及方法 |
| WO2017218763A1 (en) * | 2016-06-15 | 2017-12-21 | Carrier Corporation | Smoke detection methodology |
| EP3475928A4 (en) * | 2016-06-28 | 2020-03-04 | Smoke Detective, LLC | SYSTEM AND METHOD FOR SMOKE DETECTION USING A CAMERA |
| CN106228758A (zh) * | 2016-08-12 | 2016-12-14 | 安徽中杰信息科技有限公司 | 危险品烟雾检测方法 |
| JP6854122B2 (ja) * | 2016-12-28 | 2021-04-07 | 日本ドライケミカル株式会社 | 火点検出装置及び消防設備 |
| CN110312922B (zh) * | 2017-02-16 | 2023-11-03 | 皇家飞利浦有限公司 | 粒子表征装置和方法 |
| EP3382372A1 (en) | 2017-03-27 | 2018-10-03 | Koninklijke Philips N.V. | Optical particle sensor and sensing method |
| US11062586B2 (en) * | 2017-06-05 | 2021-07-13 | Carrier Corporation | Method of monitoring health of protective cover of detection device |
| KR102450625B1 (ko) * | 2017-08-31 | 2022-10-07 | 서울바이오시스 주식회사 | 검출기 |
| KR102447133B1 (ko) * | 2017-09-20 | 2022-09-26 | 쑤저우 레킨 세미컨덕터 컴퍼니 리미티드 | 살균 효과를 제공하는 uv led 장치 |
| US10591422B2 (en) | 2017-10-05 | 2020-03-17 | Honeywell International Inc. | Apparatus and method for increasing dynamic range of a particle sensor |
| CN109991132B (zh) * | 2018-01-03 | 2024-01-19 | 宁波方太厨具有限公司 | 一种油烟传感器及其数据处理方法 |
| JP7203500B2 (ja) * | 2018-03-13 | 2023-01-13 | 古河電気工業株式会社 | 火災煙検知装置 |
| JP7221939B2 (ja) * | 2018-03-28 | 2023-02-14 | ホーチキ株式会社 | 火災検出装置 |
| DE102018109702A1 (de) * | 2018-04-23 | 2019-10-24 | Fresenius Medical Care Deutschland Gmbh | Dialysegerät mit Blutlecksensor |
| WO2020005431A1 (en) | 2018-06-29 | 2020-01-02 | Halo Smart Solutions, Inc. | Sensor device and system |
| KR102073483B1 (ko) * | 2018-07-09 | 2020-02-04 | 한국광기술원 | 미세입자 측정장치 및 측정방법 |
| US10985075B2 (en) | 2018-10-11 | 2021-04-20 | International Business Machines Corporation | Gate formation scheme for n-type and p-type transistors having separately tuned threshold voltages |
| US11774353B2 (en) * | 2018-10-30 | 2023-10-03 | The Government Of The United States Of America, As Represented By The Secretary Of The Navy | Methods and apparatuses for biomimetic standoff detection of hazardous chemicals |
| US11137340B2 (en) | 2018-11-30 | 2021-10-05 | Sharp Kabushiki Kaisha | Particle detection sensor and particle detection apparatus |
| EP3696572A1 (en) * | 2019-02-13 | 2020-08-19 | Infineon Technologies AG | Method, apparatus and computer program for detecting a presence of airborne particles |
| WO2020170385A1 (ja) | 2019-02-21 | 2020-08-27 | 三菱電機株式会社 | 光空間生成装置、殺菌装置、空気調和装置、冷蔵庫、水殺菌装置および検出装置 |
| JP7165101B2 (ja) * | 2019-04-26 | 2022-11-02 | 株式会社日立ビルシステム | 異物検出方法及び異物検出装置 |
| KR20210012259A (ko) * | 2019-07-24 | 2021-02-03 | 삼성전자주식회사 | 미세먼지 측정 장치 및 방법 |
| TWI694606B (zh) * | 2019-08-15 | 2020-05-21 | 國立臺北科技大學 | 面型光產生裝置 |
| JP7453764B2 (ja) * | 2019-09-12 | 2024-03-21 | 能美防災株式会社 | 分離型火災検知器 |
| EP3889932B1 (en) * | 2020-03-30 | 2023-11-22 | Carrier Corporation | Beam smoke detector system |
| US11614407B2 (en) | 2020-04-20 | 2023-03-28 | Denovo Lighting, Llc | Devices for instant detection and disinfection of aerosol droplet particles using UV light sources |
| US11002671B1 (en) * | 2020-05-28 | 2021-05-11 | Soter Technologies, Llc | Systems and methods for mapping absorption spectroscopy scans and video frames |
| CN112461863B (zh) * | 2020-11-17 | 2024-09-13 | 上海探见智能家居有限公司 | 一种玻璃窗破损检测及定位方法 |
| US11302174B1 (en) | 2021-09-22 | 2022-04-12 | Halo Smart Solutions, Inc. | Heat-not-burn activity detection device, system and method |
| WO2024112277A1 (en) * | 2022-11-25 | 2024-05-30 | Mavi̇li̇ Elektroni̇k Ti̇caret Ve Sanayi̇i̇ Anoni̇m Şi̇rketi̇ | Particle detection device |
Family Cites Families (88)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3504566A (en) | 1968-05-31 | 1970-04-07 | Gti Corp | Mechanical alignment device |
| JPS51127786A (en) | 1975-04-30 | 1976-11-08 | Kokusai Gijutsu Kaihatsu Kk | Smoke sensor |
| US3982130A (en) * | 1975-10-10 | 1976-09-21 | The United States Of America As Represented By The Secretary Of The Air Force | Ultraviolet wavelength smoke detector |
| US4156816A (en) * | 1976-09-01 | 1979-05-29 | Telefonaktiebolaget L M Ericsson | Optical fire-detector |
| US4163969A (en) | 1977-06-20 | 1979-08-07 | American District Telegraph Company | Variable frequency light pulser for smoke detectors |
| GB2040443B (en) | 1978-12-07 | 1983-01-12 | English Electric Co Ltd | Optical particle size analyser |
| JPS5929274Y2 (ja) | 1980-03-03 | 1984-08-22 | ホーチキ株式会社 | 減光式煙感知器 |
| DE3175819D1 (en) * | 1980-12-18 | 1987-02-12 | Cerberus Ag | Smoke detector according to the radiation extinction principle |
| JPS57128831U (ja) | 1981-02-03 | 1982-08-11 | ||
| US4387993A (en) * | 1981-06-25 | 1983-06-14 | Tsi Incorporated | Particle size measuring method and apparatus |
| GB8621426D0 (en) | 1986-09-05 | 1986-10-15 | Health Lab Service Board | Particle analysis |
| JPS63246638A (ja) | 1987-04-01 | 1988-10-13 | Tokyo Gas Co Ltd | 流体の漏洩の広域監視方法 |
| US4928153A (en) | 1987-04-06 | 1990-05-22 | Kms Fusion, Inc. | Optical measurement of particle concentration |
| US4857895A (en) * | 1987-08-31 | 1989-08-15 | Kaprelian Edward K | Combined scatter and light obscuration smoke detector |
| JPH01121737A (ja) | 1987-11-05 | 1989-05-15 | Taito Corp | 煙感知装置 |
| US5392114A (en) * | 1988-03-30 | 1995-02-21 | Cole; Martin T. | Fluid pollution monitor |
| US4854705A (en) | 1988-04-05 | 1989-08-08 | Aerometrics, Inc. | Method and apparatus to determine the size and velocity of particles using light scatter detection from confocal beams |
| DE3831654A1 (de) * | 1988-09-17 | 1990-03-22 | Hartwig Beyersdorf | Optischer rauchmelder |
| JPH03188596A (ja) | 1989-12-19 | 1991-08-16 | Nittan Co Ltd | 煙濃度監視方式 |
| US5260765A (en) * | 1990-01-16 | 1993-11-09 | Pittway Corporation | Beam alignment apparatus and method |
| JPH03239949A (ja) | 1990-02-16 | 1991-10-25 | Rion Co Ltd | 粒子検出器用セル |
| JP2761083B2 (ja) | 1990-05-15 | 1998-06-04 | 消防庁長官 | 多波長減光式煙感知器 |
| JPH0459454U (ja) | 1990-09-27 | 1992-05-21 | ||
| JPH04148493A (ja) | 1990-10-12 | 1992-05-21 | Nohmi Bosai Ltd | 煙検出装置 |
| JPH0510873A (ja) * | 1991-03-27 | 1993-01-19 | Toshiba Corp | 粒子密度測定装置 |
| GB2259761B (en) * | 1991-09-18 | 1995-04-05 | Graviner Ltd Kidde | Smoke and particle detector |
| JPH06109631A (ja) * | 1991-10-31 | 1994-04-22 | Hochiki Corp | 火災報知装置 |
| US5255089A (en) | 1992-03-26 | 1993-10-19 | International Business Machines Corporation | Portable particle detector assembly |
| CH684556A5 (de) * | 1992-09-14 | 1994-10-14 | Cerberus Ag | Optischer Rauchmelder. |
| BR9710836A (pt) * | 1996-04-25 | 2000-10-24 | Spectrametrix Inc | Ensaio de analitos usando marcas em partìculas |
| US5694221A (en) * | 1996-06-07 | 1997-12-02 | Knapp; Julius Z. | Particle detection method for detection of contaminating particles in sealed containers |
| GB2319604A (en) * | 1996-11-25 | 1998-05-27 | Kidde Fire Protection Ltd | Smoke and particle detector |
| JP4027374B2 (ja) * | 1997-05-08 | 2007-12-26 | ニッタン株式会社 | 煙感知器および監視制御システム |
| JPH1123458A (ja) * | 1997-05-08 | 1999-01-29 | Nittan Co Ltd | 煙感知器および監視制御システム |
| JP3166841B2 (ja) | 1998-04-10 | 2001-05-14 | 日本電気株式会社 | パーティクル検査装置 |
| JP3897206B2 (ja) * | 1998-04-27 | 2007-03-22 | ホーチキ株式会社 | 異常監視装置 |
| JP3387826B2 (ja) | 1998-05-25 | 2003-03-17 | ホーチキ株式会社 | 感知器の照準機構 |
| JP3996272B2 (ja) | 1998-06-29 | 2007-10-24 | 新日本空調株式会社 | エアロゾル検出方法 |
| US6288644B1 (en) | 1998-09-01 | 2001-09-11 | Caretaker System, Inc. | Perimeter monitoring system |
| JP2001116692A (ja) | 1999-10-18 | 2001-04-27 | Nittan Co Ltd | 煙感知器および微粒子粒径計測装置および微粒子種類判別装置 |
| AUPQ553800A0 (en) | 2000-02-10 | 2000-03-02 | Cole, Martin Terence | Improvements relating to smoke detectors particularily duct monitored smoke detectors |
| US6663055B2 (en) | 2000-03-15 | 2003-12-16 | The Or Group, Inc. | Armboard assembly |
| JP3939900B2 (ja) | 2000-05-22 | 2007-07-04 | ニッタン株式会社 | 煙感知器および監視制御システム |
| WO2002050516A2 (en) | 2000-12-21 | 2002-06-27 | Evotec Oai Ag | Method for characterizing samples of secondary light emitting particles |
| DE10118913B4 (de) * | 2001-04-19 | 2006-01-12 | Robert Bosch Gmbh | Streulichtrauchmelder |
| GB2378752A (en) * | 2001-05-02 | 2003-02-19 | Univ Hertfordshire | Optical detection of the individual airborne biological particles |
| GB2379977B (en) | 2001-09-25 | 2005-04-06 | Kidde Plc | High sensitivity particle detection |
| EP1300816A1 (de) | 2001-10-04 | 2003-04-09 | VIDAIR Aktiengesellschaft | Verfahren und System zur Erkennung von Bränden in Räumen |
| GB2385933B (en) | 2002-02-27 | 2005-06-15 | Jude Barker-Mill | Wind indicator |
| JP2003281643A (ja) * | 2002-03-26 | 2003-10-03 | Nohmi Bosai Ltd | 減光式煙感知器 |
| US7505604B2 (en) * | 2002-05-20 | 2009-03-17 | Simmonds Precision Prodcuts, Inc. | Method for detection and recognition of fog presence within an aircraft compartment using video images |
| US7564365B2 (en) * | 2002-08-23 | 2009-07-21 | Ge Security, Inc. | Smoke detector and method of detecting smoke |
| JP4102626B2 (ja) | 2002-09-13 | 2008-06-18 | 能美防災株式会社 | 煙検出装置 |
| DE10246056A1 (de) * | 2002-10-02 | 2004-04-22 | Robert Bosch Gmbh | Rauchmelder |
| ITPD20030019A1 (it) | 2003-01-30 | 2004-07-31 | Manfrotto Lino & C Spa | Testa ad orientamento rapido per apparecchiature |
| JP4010455B2 (ja) * | 2003-04-24 | 2007-11-21 | ホーチキ株式会社 | 散乱光式煙感知器 |
| AU2003902319A0 (en) * | 2003-05-14 | 2003-05-29 | Garrett Thermal Systems Limited | Laser video detector |
| US7233253B2 (en) * | 2003-09-12 | 2007-06-19 | Simplexgrinnell Lp | Multiwavelength smoke detector using white light LED |
| US20080021674A1 (en) * | 2003-09-30 | 2008-01-24 | Robert Puskas | Methods for Enhancing the Analysis of Particle Detection |
| WO2005033283A2 (en) | 2003-09-30 | 2005-04-14 | Singulex, Inc. | Methods for enhancing the analysis of particle detection |
| GB0323055D0 (en) | 2003-10-02 | 2003-11-05 | Unidata Europ Ltd | Particulate detector |
| US7671988B2 (en) * | 2004-02-18 | 2010-03-02 | American Ecotech Llc | Detection of particles |
| JP2006085608A (ja) | 2004-09-17 | 2006-03-30 | Fuji Photo Film Co Ltd | 煙検出装置、煙検出方法、霧煙判別システム、霧煙判別方法、及びプログラム |
| GB0421469D0 (en) * | 2004-09-27 | 2004-10-27 | Dt Assembly & Test Europ Ltd | Apparatus for monitoring engine exhaust |
| US8685711B2 (en) * | 2004-09-28 | 2014-04-01 | Singulex, Inc. | Methods and compositions for highly sensitive detection of molecules |
| DE102004053686A1 (de) * | 2004-11-03 | 2006-05-04 | Essling, Mirko | Laserempfangseinrichtung mit verbesserter Genauigkeit und geringerem Stromverbrauch |
| WO2006050570A1 (en) | 2004-11-12 | 2006-05-18 | Vfs Technologies Limited | Particle detector, system and method |
| US7525660B2 (en) * | 2005-02-08 | 2009-04-28 | Northrop Grumman Systems Corporation | Systems and methods for use in detecting harmful aerosol particles |
| US7495573B2 (en) | 2005-02-18 | 2009-02-24 | Honeywell International Inc. | Camera vision fire detector and system |
| WO2006102293A2 (en) * | 2005-03-18 | 2006-09-28 | Michael Collins | Erasable, flexible signs and banners including collapsible supports |
| US7456961B2 (en) * | 2005-04-14 | 2008-11-25 | The Boeing Company | Apparatus and method for detecting aerosol |
| GB2426323A (en) | 2005-05-16 | 2006-11-22 | Fire Fighting Entpr Ltd | Infra-red beam smoke detection system |
| NO326482B1 (no) * | 2005-05-31 | 2008-12-15 | Integrated Optoelectronics As | En ny infrarod laserbasert alarm |
| JP2007057360A (ja) * | 2005-08-24 | 2007-03-08 | Agilent Technol Inc | 粒子検出装置及びそれに使用される粒子検出方法 |
| WO2008154737A1 (en) * | 2007-06-18 | 2008-12-24 | Leddartech Inc. | Lighting system with traffic management capabilities |
| JP5046076B2 (ja) | 2005-12-22 | 2012-10-10 | 独立行政法人日本原子力研究開発機構 | 特定物質を含むエアロゾルの遠隔選別画像計測法 |
| JP4585966B2 (ja) * | 2005-12-27 | 2010-11-24 | ホーチキ株式会社 | 減光式煙感知器 |
| CN101512613A (zh) | 2006-09-07 | 2009-08-19 | 西门子瑞士有限公司 | 涉及微粒监控器及其方法的改进 |
| JP4793194B2 (ja) | 2006-09-14 | 2011-10-12 | 富士ゼロックス株式会社 | 煙検出装置、閃光定着装置及び画像形成装置 |
| US7982869B2 (en) * | 2006-10-24 | 2011-07-19 | Pd-Ld Inc. | Compact, low cost Raman monitor for single substances |
| US7561329B2 (en) | 2006-12-14 | 2009-07-14 | Cytyc Corporation | Illumination source for stained biological samples |
| US8098362B2 (en) | 2007-05-30 | 2012-01-17 | Nikon Corporation | Detection device, movable body apparatus, pattern formation apparatus and pattern formation method, exposure apparatus and exposure method, and device manufacturing method |
| GB2450132B (en) | 2007-06-13 | 2012-06-20 | Hochiki Co | Position specifiying system |
| US8085157B2 (en) * | 2007-10-24 | 2011-12-27 | Honeywell International Inc. | Smoke detectors |
| JP4389991B2 (ja) * | 2007-10-26 | 2009-12-24 | ソニー株式会社 | 微小粒子の光学的測定方法及び光学的測定装置 |
| KR101705220B1 (ko) | 2007-11-15 | 2017-02-09 | 엑스트랄리스 테크놀로지 리미티드 | 입자 검출 |
| WO2009149498A1 (en) | 2008-06-10 | 2009-12-17 | Xtralis Technologies Ltd | Particle detection |
| TWI600891B (zh) | 2009-05-01 | 2017-10-01 | 愛克斯崔里斯科技有限公司 | 微粒偵測技術(一) |
-
2009
- 2009-06-10 WO PCT/AU2009/000727 patent/WO2009149498A1/en active Application Filing
- 2009-06-10 CA CA2959377A patent/CA2959377C/en active Active
- 2009-06-10 CA CA2727113A patent/CA2727113C/en active Active
- 2009-06-10 KR KR1020187010787A patent/KR101947004B1/ko active IP Right Grant
- 2009-06-10 KR KR1020117000597A patent/KR101738013B1/ko active IP Right Grant
- 2009-06-10 KR KR1020177011608A patent/KR101851255B1/ko active IP Right Grant
- 2009-06-10 US US12/997,155 patent/US8804119B2/en active Active
- 2009-06-10 JP JP2011512783A patent/JP5647108B2/ja not_active Expired - Fee Related
- 2009-06-10 CN CN200980130131.9A patent/CN102112867B/zh active Active
- 2009-06-10 CN CN201510765706.1A patent/CN105445234B/zh active Active
- 2009-06-10 AU AU2009257179A patent/AU2009257179B2/en active Active
- 2009-06-10 CN CN201910521795.3A patent/CN110296959B/zh active Active
- 2009-06-10 EP EP21175474.2A patent/EP3885743A1/en not_active Withdrawn
- 2009-06-10 EP EP09761163.6A patent/EP2286204B1/en active Active
- 2009-06-10 MY MYPI2010005880A patent/MY162695A/en unknown
- 2009-06-10 MY MYPI2015001780A patent/MY174816A/en unknown
-
2014
- 2014-06-27 US US14/318,033 patent/US9267884B2/en active Active
- 2014-11-06 JP JP2014225974A patent/JP2015072278A/ja active Pending
-
2015
- 2015-02-03 AU AU2015200517A patent/AU2015200517B2/en active Active
- 2015-11-30 US US14/954,141 patent/US9645081B2/en active Active
-
2016
- 2016-05-20 HK HK16105797.6A patent/HK1217764A1/zh unknown
-
2017
- 2017-02-09 AU AU2017200888A patent/AU2017200888B2/en active Active
- 2017-03-10 US US15/456,246 patent/US10309898B2/en active Active
- 2017-10-02 JP JP2017192640A patent/JP6517297B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020038203A (ja) * | 2018-08-21 | 2020-03-12 | ヴァイアヴィ・ソリューションズ・インコーポレイテッドViavi Solutions Inc. | マルチスペクトルセンサベースの警報条件検知器 |
| JP7231516B2 (ja) | 2018-08-21 | 2023-03-01 | ヴァイアヴィ・ソリューションズ・インコーポレイテッド | マルチスペクトルセンサベースの警報条件検知器 |
| US11604129B2 (en) | 2018-08-21 | 2023-03-14 | Viavi Solutions Inc. | Multispectral sensor based alert condition detector |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6517297B2 (ja) | 粒子の検出 | |
| TWI503530B (zh) | 微粒偵測技術 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120611 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120611 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130702 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130919 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130927 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131101 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131111 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131129 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140602 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141007 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141106 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5647108 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |