JP5641819B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP5641819B2 JP5641819B2 JP2010187169A JP2010187169A JP5641819B2 JP 5641819 B2 JP5641819 B2 JP 5641819B2 JP 2010187169 A JP2010187169 A JP 2010187169A JP 2010187169 A JP2010187169 A JP 2010187169A JP 5641819 B2 JP5641819 B2 JP 5641819B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- motor
- detection
- stepping motor
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Control Or Security For Electrophotography (AREA)
- Color Electrophotography (AREA)
Description
上式において、Vin:入力電圧、em:逆起電圧、R:巻線抵抗、I:巻線電流、L:巻線インダクタンスであり、モータ速度変化による電流変化分を次式として扱う。
ここで、em>1、R=0.数Ωとなるので、次式のように簡略化することができ、速度毎の逆起電圧が測定できていれば、次式に基づく速度補正比が得られる。
上式では、逆起電圧が不明な場合でも、モータの動作範囲が、逆起電圧の影響が少なく、定電流駆動が可能な速度領域であれば、速度補正比は、各速度での位相差比に基づく傾き量からトルク減衰量と同等に扱える。つまり、静止時電流の位相差比PH_R0と、所定速度での動作時電流の位相差比PH_R1との比(=PH_R0/PH_R1)がトルク減衰量として扱える。
以上のようにして、補正された位相差比の負荷トルクに対する関係は、図7(c)に示すように、略線形な逆比例の関係である。さらに、図7(a)に示すように、巻線電流の設定値により、出力トルクが変化することは、図7(b)に示す変位θ(ずれ角)も変化することになる。これは、前述の速度比による場合と同様に、巻線電流値により補正することで、略負荷トルクに対する位相差比の変化は同じ関係とすることが可能となる。
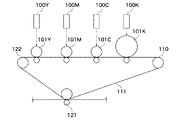
102Y,102M,102C,102K,112 駆動モータ
105Y,105M,105C,105K,105B エンコーダセンサ
111 中間転写ベルト
201Y,201M,201C,201B,202 モータ制御器
202g 発振制御器
202h モータ駆動回路
300 位相差比検知回路
305 周期測定回路
306 位相差検知回路
307 電流補正回路
Claims (1)
- DCモータにより回転駆動される第1の感光体と、
ステッピングモータにより回転駆動される、前記第1の感光体より外径が大きい第2の感光体と、
前記第1の感光体の回転速度を検出する第1の速度検出手段と、
前記第2の感光体の回転速度を検出する第2の速度検出手段と、
前記第1の速度検出手段の検出結果に基づき前記DCモータを制御する第1の制御手段と、
前記第2の速度検出手段の検出結果に基づき前記ステッピングモータを制御する第2の制御手段とを備え、
前記第2の制御手段は、
前記ステッピングモータの各巻線の相電流を検出する相電流検出手段と、
前記相電流検出手段の検出結果から零クロスを検出する零クロス検知手段と、
前記ステッピングモータを駆動するための駆動制御パルス信号と前記零クロス検知手段により検出された零クロスから位相差を検出する位相差検知手段と、
前記駆動制御パルス信号から周期を検出する周期測定手段と、
前記位相差検知手段により検出された位相差と前記周期測定手段により検出された周期から補正値を求める設定手段とを備え、
前記ステッピングモータの巻線電流値が前記補正値と電流基準値とに応じた電流値となるように制御すると共に、前記第2の速度検出手段の検出結果と速度指令信号との差分および前記補正値に基づき前記ステッピングモータを制御し、
前記第1の制御手段は、
前記第1の速度検出手段の検出結果と速度指令信号との差分及び前記補正値に基づき前記DCモータを制御することを特徴とする画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010187169A JP5641819B2 (ja) | 2010-08-24 | 2010-08-24 | 画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010187169A JP5641819B2 (ja) | 2010-08-24 | 2010-08-24 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012047800A JP2012047800A (ja) | 2012-03-08 |
| JP2012047800A5 JP2012047800A5 (ja) | 2013-10-10 |
| JP5641819B2 true JP5641819B2 (ja) | 2014-12-17 |
Family
ID=45902795
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010187169A Expired - Fee Related JP5641819B2 (ja) | 2010-08-24 | 2010-08-24 | 画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5641819B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150049599A (ko) * | 2013-10-30 | 2015-05-08 | 삼성전자주식회사 | 전원공급장치 및 이를 구비한 화상형성장치 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6183139B2 (ja) * | 2013-10-18 | 2017-08-23 | コニカミノルタ株式会社 | 画像処理装置 |
| JP2018066779A (ja) * | 2016-10-17 | 2018-04-26 | コニカミノルタ株式会社 | 読み取り装置及び画像形成システム並びに画像形成装置 |
| JP7237783B2 (ja) * | 2019-09-17 | 2023-03-13 | 株式会社東芝 | 制御装置及びモータ駆動システム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10186952A (ja) * | 1996-12-20 | 1998-07-14 | Canon Inc | モータ制御装置およびこれを用いた装置、画像形成装置 |
| JP2004260978A (ja) * | 2003-02-28 | 2004-09-16 | Canon Inc | ステッピングモータ制御装置 |
| JP2008257203A (ja) * | 2007-03-12 | 2008-10-23 | Nidec-Shimpo Corp | 画像形成装置の駆動装置、およびこれを用いた画像形成装置 |
| JP2009065806A (ja) * | 2007-09-10 | 2009-03-26 | Panasonic Corp | ステッピングモータ駆動装置及びステッピングモータ駆動方法 |
| JP4677468B2 (ja) * | 2008-04-17 | 2011-04-27 | シャープ株式会社 | 画像形成装置 |
| JP5132478B2 (ja) * | 2008-08-25 | 2013-01-30 | キヤノン株式会社 | 画像形成装置 |
| JP5491207B2 (ja) * | 2010-01-13 | 2014-05-14 | キヤノン株式会社 | ステッピングモータの駆動装置 |
| JP2011232645A (ja) * | 2010-04-28 | 2011-11-17 | Canon Inc | 画像形成装置 |
| JP5704849B2 (ja) * | 2010-07-02 | 2015-04-22 | キヤノン株式会社 | 画像形成装置 |
-
2010
- 2010-08-24 JP JP2010187169A patent/JP5641819B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150049599A (ko) * | 2013-10-30 | 2015-05-08 | 삼성전자주식회사 | 전원공급장치 및 이를 구비한 화상형성장치 |
| KR101872318B1 (ko) | 2013-10-30 | 2018-06-28 | 에이치피프린팅코리아 주식회사 | 전원공급장치 및 이를 구비한 화상형성장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012047800A (ja) | 2012-03-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5704849B2 (ja) | 画像形成装置 | |
| US8849134B2 (en) | Image forming apparatus having banding correction function | |
| CN102236288B (zh) | 图像形成设备 | |
| JP5641819B2 (ja) | 画像形成装置 | |
| US9621087B2 (en) | Stepping motor driving apparatus, image carrier rotation driving apparatus and image forming apparatus | |
| JP2017184490A (ja) | モータ駆動装置及び画像形成装置 | |
| JP2013219871A (ja) | モータ制御装置 | |
| JP2002139112A (ja) | 無端状ベルト駆動装置および画像形成装置 | |
| JP7296733B2 (ja) | モータ制御装置及び画像形成装置 | |
| JP2012257429A (ja) | モータ駆動制御装置及び画像形成装置 | |
| US8879960B2 (en) | Image bearing member drive unit that drives image bearing member, method of controlling image bearing member drive unit, storage medium, and image forming apparatus | |
| JP2010141995A (ja) | モータ制御装置及び画像形成装置 | |
| JP5203823B2 (ja) | 画像形成装置、画像形成装置の制御方法、プログラム及び記憶媒体 | |
| JP2006058364A (ja) | 画像形成装置 | |
| JP2011147273A (ja) | モータ制御装置、画像形成装置、半導体集積装置及びモータ制御プログラム | |
| JP2015149800A (ja) | 永久磁石モータの制御装置及び画像形成装置 | |
| US20130142545A1 (en) | Image forming apparatus | |
| JP5762728B2 (ja) | ブラシレスモータ | |
| JP5132478B2 (ja) | 画像形成装置 | |
| JP5258209B2 (ja) | ステッピングモータ駆動装置および画像形成装置 | |
| JP4873720B2 (ja) | ステッピングモータ駆動制御装置およびそれを用いた画像形成装置 | |
| JP4957184B2 (ja) | 回転体駆動装置および画像形成装置 | |
| JP4078246B2 (ja) | モータ制御装置及び画像形成装置 | |
| JP2012226201A (ja) | 回転体速度検出装置および画像形成装置 | |
| JP2022011042A (ja) | モータ制御装置及び画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130826 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130826 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140519 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140527 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140728 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140930 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141028 |
|
| LAPS | Cancellation because of no payment of annual fees |