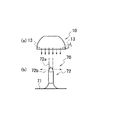
以下、本発明の実施形態について図面を参照して説明する。はじめに、図1を参照して、本発明の実施形態に係る基板検査装置について説明する。本発明の実施形態に係る基板検査装置は、基板面に半田付けされる電子部品の状態を検査する装置である。図1は、本発明の実施形態に係る基板検査装置を模式的に示した図である。
図1に示すように、基板検査装置1は、基板面71に対して垂直に光を出射するドーム照明10と、基板面71に対して平行に光を出射するローアングル照明20と、基板面71を撮影するCCD(Charge Coupled Device)カメラ(撮影手段)30と、基板70を載置する基台40と、基板70を載置した基台40を移動するレール45から略構成されている。
ドーム照明10は、基板面71と対峙して配置されている。そして、ドーム照明10は、内面が反射面12とされ湾曲した形状(ドーム形状、御椀形状)をなす反射部材11と、反射部材11の基板側周囲部15に複数個配置された白色LED(白色光出射手段)13を有している。
反射部材11は、中央部が開口されており、この開口部16にはCCDカメラ30が設けられている。また、白色LED13は、レンズをCCDカメラ30側に向けて配置されており、反射面12側に白色光を出射することにより、間接的に基板面71に白色光を照射する。
ローアングル照明20は、基板70の周囲を囲むことが可能な形状(例えば、上面視すると、ドーム照明10と略同心円状の円形、又は、ドーム照明10の中心線が同一である四角形等)であり、反射部材11の基板側周囲部15に複数個配置された赤色LED21(着色光出射手段)を有している。赤色LED21は、レンズをドーム照明10の中心線に向けて配置されており、基板面71に対して略平行な方向に向けて着色光(赤色)を出射する。また、赤色LED21は、後述する半田付け部位74(図8(a)参照)の最下部より上側の位置に出射する。つまり、基板面71より所定間隔以内(半田付け部位74の最下部)には赤色の着色光を出射しない位置に赤色LED21が配置されている。
なお、本発明の実施形態では、着色光出射手段は、赤色LED21の場合について説明するが、着色光を出射する光源であれば他の色のLEDであってもよい(例えば、青色LED、緑色LED等)。
CCDカメラ30は、例えば、500万画素カラーCCDカメラであり、基板面71と対峙して開口部16に配置され、白色LED13及び赤色LED21を同時に発光したときに基板面71を撮影する。このように、CCDカメラ30を開口部16に設けることにより、基板面71に照射された白色光及び着色光を基板面71と対峙した位置から撮影するため、高精度に基板70の半田付け状態を検査することができる。
基台40は、レール45の嵌合部(図示省略)と嵌合して、基板70を保持しながらレール45上を移動する。レール45は、基板70を上面視した場合に左右方向(X軸方向)に移動するX軸方向レール46と、基板70を上面視した場合に上下方向(左右方向に直交する方向、Y軸方向)に移動するY軸方向レール47から構成されている。
次に、図2及び図3を参照して、ドーム照明10の白色LED13と、ローアングル照明20の赤色LED21が照射した光と、CCDカメラ30により撮影した画像について説明する。図2は、本発明の実施形態に係る基板検査装置が基板面に白色光を照射した場合を示す図である。図3は、本発明の実施形態に係る基板検査装置が基板面に白色光及び赤色光を照射した場合を示す図である。
図2(a)に示すように、ドーム照明10の白色LED13は、間接的に基板面71に白色光を照射する。つまり、白色LED13は、反射部材11(図1参照)側に白色光を出射し、反射部材11により反射した光は、基板面71に対して垂直方向に照射する。
図2(b)に示すように、電子部品のリード72の先端部72a等、基板面71に対して平行な部分に対して白色LED13が照射した光は、ドーム照明10側に反射するため、白色光がCCDカメラ30(図1参照)に入り易くなる。しかし、先端部72aの周囲の傾斜面72b等、基板面71に対して傾斜している部分に対して白色LED13が照射した光は、ドーム照明10側に反射しないため(図2(b)の矢印A参照)、白色光がCCDカメラ30に入り難くなる。
つまり、CCDカメラ30により基板面71を撮影すると、基板面71に対して平行な部分は白色の画像、基板面71に対して垂直な部分は黒色の画像となり、基板面71に傾斜する部分は基板面71に対する傾斜角度に応じて、白色の濃さ(黒色の濃さ)が異なる画像(色位差が異なる画像)が撮影される。
図3(a)に示すように、ローアングル照明20の赤色LED22は、基板面71に対して平行な方向に向けて赤色の着色光を出射する。つまり、白色LED13は、基板面71に対して垂直方向に照射するが、赤色LEDは、基板面71に対して平行方向に照射する。
図3(b)に示すように、基板面71に対して所定角度傾斜する方向に固定されているリード72等、基板面71に傾斜している部分に対して赤色LED21が照射した光は、リード72等の傾斜角度によってはドーム照明10側に反射するため(図3(b)の矢印B参照)、赤色光がCCDカメラ30(図1参照)に入り易くなる。しかし、例えば、リード72等の傾斜角度が小さい場合には、赤色光がCCDカメラ30に入り難くなる。
つまり、赤色LED21と同時に白色LED13を発光してCCDカメラ30(図1参照)により基板面71を撮影すると、基板面71に対して平行な部分は白色の画像、基板面71に対して傾斜する部分は、基板面71に対する傾斜角度に応じて、赤色の濃さ(白色の濃さ)が異なる画像(色位差が異なる画像)が撮影される。
次に、図4を参照して、本発明の実施形態に係る基板検査装置1が備える回路の構成について説明する。図4は、本発明の実施形態に係る基板検査装置の回路の構成を示すブロック図である。
図4に示すように、基板検査装置1は、基板検査装置1全体を制御すると共に、CCDカメラ30(図1参照)による基板面71(図1参照)の撮影を行う撮影制御、CCDカメラ30で撮影された画像中の所定の領域を設定する領域設定、設定した領域中に含まれる着色領域を求める画像処理、電子部品のリード72(図2及び図3参照)の半田付けが良好か否かの判定等を行うCPU(Central Processing Unit)51を備えている。
CPU51(撮影制御手段、領域設定手段、画像処理手段、判定手段)には、ROM(Read Only Memory)52と、RAM(Random Access Memory)53と、CCDカメラ30と、ディスプレイ35と、発光制御部54と、移動制御部55と、警報灯36と、スピーカ37が接続されている。
ROM52は、CPU51により実行される制御プログラム、ディスプレイ35に表示する画像データ等を記憶する。また、RAM53は、制御プログラムの実行等により決定した各種データ等を記憶する。
CCDカメラ30は、CPU51から出力される信号に基づいて、基板面71(図1参照)を複数回撮影する。基板面71は、例えば、基板面71を上面視した場合に、縦4コマ、横6コマの撮影領域に分割されており、CCDカメラ30は分割された撮影領域毎に撮影する。CCDカメラ30で撮影した基板面71の画像はCPU51へ出力する。
ディスプレイ35は、CCDカメラ30で撮影した基板面71の画像を表示する。また、CPU51により判定したリード72の半田付けが良好であるか否か等の情報画像を表示する。
発光制御部54は、CPU51により出力された信号に基づいて、ドーム照明10の白色LED13(図1参照)、及び、ローアングル照明20の赤色LED21(図1参照)の発光を制御する。
移動制御部55は、CPU51により出力された信号に基づいて、基台40を移動することにより、基板面71に設定された撮影領域の全てをCCDカメラ30で撮影可能に制御する。
警報灯36は、CPU51によりリード72の半田付け状態が不良であると判定された場合等、CPU51から出力される信号に基づいて点灯することにより作業者等に半田付けが不良である旨を報知する。
スピーカ37は、CPU51によりリード72の半田付け状態が不良であると判定された場合等、CPU51から出力される信号に基づいて警報音を出力することにより作業者等に半田付け状態が不良である旨を報知する。
次に、図5及び図6を参照して、本発明の実施形態に係る基板検査装置1の動作について説明する。図5は、本発明の実施形態に係る制御処理のフローチャートを示す図である。図6は、本発明の実施形態に係る基板検査装置による判定結果を表示した画面を示す図である。
図5に示すように、はじめに、CPU51は、基台40(図1参照)に基板70(図1参照)を載置する(ステップS1)。つまり、CPU51は、検査対象となる基板70を所定の位置から、基台40へ移動する。基板70の移動は、一対の長尺形状の金属板等で基板70の一端及び他端を挟むことにより支持して移動してもよいし、一対の長尺形状の金属板等で基板面71(図1参照)の下方から支持して移動してもよい。
次に、CPU51は、基板70を所定の撮影位置へ移動する(ステップS2)。撮影位置とは、CCDカメラ30(図1参照)によって基板70を撮影可能な位置であり、例えば、基板面71を上面視した場合に、縦4コマ、横6コマの撮影領域に分割された複数の撮影領域のうち、任意の撮影領域(例えば、1回目の撮影は左上の撮影領域、2回目の撮影はその右隣の撮影領域等)をCCDカメラ30で撮影可能な位置へ基板70を移動する。
次に、CPU51は、白色LED13を同時に発光する(ステップS3)。つまり、ドーム照明10に複数個配置された白色LED13(図1参照)を発光する。白色LED13が出射した光は基板面71に入射する。
次に、CPU51は、CCDカメラ30で基板面71を撮影する(ステップS4)。つまり、ステップS2において、所定の位置へ移動した基板70に設定された任意の撮影領域をCCDカメラ30により撮影する。
次に、CPU51は、後で図7を参照して説明する第1判定処理を行う(ステップS5)。この処理では、CCDカメラ30により撮影された画像中の、電子部品のリード72を含む所定の領域を設定し(後述する図8から図11参照)、設定された所定の領域中に含まれる白色領域に基づいて、リードの半田付け状態が良好であるか否か、濡れ量が良好であるか否かを判定する。
次に、CPU51は、第1判定結果をディスプレイ35に表示する(ステップS6)。具体的には、図6に示すように、ディスプレイ35の基板判定画像領域35aにCCDカメラ30により撮影した基板面71の画像を表示する。ディスプレイ35は、基板判定画像領域35aの他に、総合判定を表示する総合判定領域35bと、検査基板70の情報等を表示する検査基板情報領域35cと、基板の不良情報等を表示する不良情報表示領域35d等を有している。
次に、CPU51は、白色LED13及び赤色LED21を同時に発光する(ステップS7)。つまり、ドーム照明10に複数個配置された白色LED13(図1参照)と、ローアングル照明20に複数個配置された赤色LED21(図1参照)を同時に発光する。白色LED13及び赤色LED21が出射した光は基板面71に入射する。
次に、CPU51は、CCDカメラ30で基板面71を撮影する(ステップS8)。つまり、ステップS2において、所定の位置へ移動した基板70に設定された任意の撮影領域をCCDカメラ30により撮影する。
次に、CPU51は、後で図12を参照して説明する第2判定処理を行う(ステップS9)。この処理では、CCDカメラ30により撮影された画像中の、ランド73の円周で囲まれる領域の外側となる領域に所定の領域(後述する図13及び図14参照)を設定し、設定された所定の領域中に含まれる着色領域に基づいて、リード72がランド73に対して傾斜する角度が良好であるか否かを判定する。
次に、CPU51は、第2判定結果をディスプレイ35に表示する(ステップS10)。具体的には、図6に示すように、ディスプレイ35の基板判定画像領域35aにCCDカメラ30により撮影した基板面71の画像を表示する。
次に、CPU51は、所定回数撮影したか否かを判定する(ステップS11)。つまり、CCDカメラ30にて所定回数基板面71を撮影することにより、複数の撮影領域に分割された基板面71の撮影領域を全て撮影したか否かを判定する。CPU51は、所定回数撮影していないと判定したときには(ステップS11:NO)、ステップS2の処理に移り、複数の撮影領域のうち、任意の撮影領域(まだ、撮影されていない撮影領域)を撮影する。
一方、CPU51は、所定回数撮影したと判定したときには(ステップS11:YES)、最終判定結果をディスプレイに表示する(ステップS12)。つまり、複数の撮影領域に分割された基板面71の撮影領域を全て撮影した結果を、図6に示すディスプレイ35の総合判定領域35b、検査基板情報領域35c、不良情報表示領域35d等に表示する。
次に、CPU51は、合格判定か否かを判定する(ステップS13)。つまり、各撮影領域を撮影した画像に基づいてリード72の半田付け状態等が良好か否かを判定した結果、各撮影領域に半田付け状態等が不良の部分がなく、全ての撮像領域の半田付け状態等が良好であるか否かを判定する。CPU51は、合格判定であると判定したときには(ステップS13:YES)、所定の位置へ基板70を移動する(ステップS14)。つまり、CPU51は、検査対象となる基板70を基台40から所定の位置(合格判定の基板70のみが載置される場所)へ移動する。基板70の移動は、一対の長尺形状の金属板で基板70の一端及び他端を挟むことにより支持して移動してもよいし、一対の長尺形状の金属板で基板面71(図1参照)の下方から支持して移動してもよい。この処理を終了すると、CPU51は、制御処理を終了する。
一方、CPU51は、合格判定ではないと判別したときには(ステップS13:NO)、他の位置へ基板70を移動する(ステップS15)。つまり、CPU51は、検査対象となる基板70を基台40から所定の位置(不合格判定の基板70のみが載置される場所)へ移動する。また、CPU51は、警報灯36及びスピーカ37(図4参照)に信号を出力して作業者等に半田付けが不良である旨を報知する。この処理を終了すると、CPU51は、制御処理を終了する。
このように、CPU51は、基板面71に白色光を照射する白色LED13を発光してCCDカメラ30により撮影し、次に、白色LED13と、基板面71に対して略平行な方向に向けて着色光を出射する赤色LED21を同時に発光させてCCDカメラにより撮影する。
次に、図7から図14を参照して、リード72がランド73に半田付けされている場合におけるリード72の半田付け状態の良否の判定について説明する。半田付けの良否の判定は、CCDカメラ30(図1参照)で撮影された画像中に所定の領域を設定し、所定の領域中に含まれる白領域に基づいて行う。
はじめに、図7から図11を参照して、電子部品のリード72が基板面に形成されたランド73に対して直行する方向に固定して半田付けされている場合における半田付けの良否の判定について説明する。図7は、本発明の実施形態に係る基板検査装置による第1判定処理のフローチャートを示す図である。図8(a)は、本発明の実施形態に係る基板検査装置が、リードの半田付け状態が良好と判定する場合を示す図である。図8(b)は、本発明の実施形態に係る基板検査装置が、リードの半田付け状態が良好と判定する場合の半田付け部位の上面図である。図9(a)は、本発明の実施形態に係る基板検査装置が、リードの半田付け状態が不良と判定する場合を示す図である。図9(b)は、本発明の実施形態に係る基板検査装置が、リードの半田付け状態が不良と判定する場合の半田付け部位の上面図である。図10(a)は、本発明の実施形態に係る基板検査装置が、リードが無いと判定する場合を示す図である。図10(b)は、本発明の実施形態に係る基板検査装置が、リードが無いと判定する場合の半田付け部位の上面図である。図11は、本発明の実施形態に係る基板検査装置が、半田濡れ量が不足していると判定する場合を示す図である。
図7に示すように、はじめに、CPU51は、第1の判定領域を設定する(ステップS21)。具体的にCPU51は、図8に示すように、先端部72aが平面とされ、先端部72aの周囲が傾斜面72bとされる電子部品のリード72が、基板面71に形成されたランド73に対して略直交する方向に固定して半田付けされている場合において、図8(b)に示すように、少なくともリード72部分を含む第1の判定領域81を設定する。
次に、CPU51は、白色領域を抽出する(ステップS22)。具体的にCPU51は、図8(b)に示すように、第1の判定領域81内で、白色領域(白色に撮影された領域)を抽出する。つまり、第1の判定領域81内で白色領域の占める割合を求める。
次に、CPU51は、白色領域は第1閾値以下か否かを判定する(ステップS23)。つまり、図8(b)に示す第1の判定領域81内で白色領域の占める割合が第1閾値以下(例えば、第1の判定領域81内で白色領域が占める割合が60%以下)であるか否かを判定する。CPU51は、白色領域が第1閾値以下であると判定したときには(ステップS23:YES)、リード72の半田付け状態は良好と判定する(ステップS24)。
例えば、図8(a)に示すように、半田付け部位(フィレット)74から突出したリード72の長さが良好である場合(リードが半田付け部位74から所定の長さ突出している場合)には、先端部72aの周囲の傾斜面72bに対して白色LED13が照射した光がCCDカメラ30に入射され難くなる。このため、図8(b)に示す撮影された画像中の第1の判定領域81内では、先端部72aが白色、傾斜面72bが黒色に撮影され、白色領域の占める割合は少なくなる(黒色の領域が多くなる)。従って、図8(a)に示す場合には、白色領域が第1閾値以下となるため(第1閾値以上となるため)、CPU51は、リード72の半田付け状態が良好であると判定する。
一方、CPU51は、白色領域が第1閾値以下ではないと判定したときには(ステップS23:NO)、リードの半田付け状態が不良と判定する(ステップS25)。例えば、図9(a)に示すように、リード72の傾斜面72bが半田付け部位74に埋もれ、半田付け部位(フィレット)74から突出したリード72の長さが不足している場合には、白色LED21(図1参照)が発光した光がCCDカメラ30に入射され易くなる。このため、図9(b)に示す撮影された画像中の第1の判定領域81内では、白色領域の占める割合は多くなる(傾斜面72bに対応する黒色の領域が少なくなる)。従って、図9(a)に示す場合には、白色領域が第1閾値以下とはならないため(第1閾値以上となるため)、CPU51は、半田付け状態が不良であると判定する。
また、例えば、図10に示すように、リード72の傾斜面72bが完全に半田付け部位74に埋もれ、又は、リード72が半田付けされていない場合には、白色LED21(図1参照)が発光した光がCCDカメラ30に入射され易くなる。このため、図10(b)に示す撮影された画像中の第1の判定領域81内では、白色領域の占める割合は多くなる(傾斜面72bに対応する黒色の領域がない)。従って、図10(a)に示す場合には、白色領域が第1閾値以下とはならないため(第1閾値以上となるため)、CPU51は、半田付け状態が不良であると判定(リード72が無いと判定)する。
このように、CPU51は、反射面12側に白色光を出射することにより、間接的に基板面71に白色光を照射する白色LED13を発光させてCCDカメラ30により撮影する。リード71がランド73に対して直交する方向に固定されている場合、CCDカメラ30により撮影された画像は、リード72の先端72aに対応する部分は白色で撮影され、リード72の傾斜面72bは黒色に撮影される。このため、リード72を鮮明に識別することが可能となり、高精度に基板70を検査することができる。
また、少なくともリード72部分を含む所定の領域を第1の判定領域81とし、第1の判定領域81中に含まれる白色領域に基づいて、リード72の半田付けが良好であるか否かを判定する。このため、設定する領域を変更することにより、リード72の半田付け状態の良否のみならず、半田付け部位74の濡れ量も検査することが可能となる。
従って、リード72を鮮明に識別することにより、検査の精度を向上した基板検査装置1を提供することができる。
次に、CPU51は、第2の判定領域82を設定する(ステップS26)。具体的にCPU51は、図11に示すように、第1の判定領域81(図7(b)参照)の外側で、ランド73を含む第2の判定領域82を設定する。第2の判定領域82は、ランド73の外側の領域内からリード72(図8(a)参照)の円周で囲まれた領域を除く領域を第2の判定領域82として設定してもよい。
次に、CPU51は、他の白色領域を抽出する(ステップS27)。具体的にCPU51は、図11に示すように、第2の判定領域82内で、白色領域(白色に撮影された領域)を抽出する。つまり、第2の判定領域82内で白色領域の占める割合を求める。
次に、CPU51は、白色領域は第2閾値以下であるか否かを判定する(ステップS28)。つまり、図11に示す第2の判定領域82内で白色領域の占める割合が第2閾値下上(例えば、第2の判定領域82内で白色領域が占める割合が50%以下)であるか否かを判定する。CPU51は、白色領域が第2閾値以下であると判定したときには(ステップS28:YES)、半田付け部位の濡れ量が良好と判定する(ステップS29)。
つまり、半田付け部位(フィレット)74の半田量が良好の場合には、半田付け部位64に対して白色LED21(図1参照)が照射した光がCCDカメラ30に入射され難くなる。このため、撮影された画像中の第2の判定領域82内では白色領域の占める割合は少なくなる。従って、CPU51は、白色領域が第2閾値以上とはならないため(第2閾値以下となるため)、半田付け部位74の半田量が良好であると判定する。この処理を終了すると、CPU51は、第1判定処理を終了する。
一方、CPU51は、白色領域が第2閾値以下ではないと判定したときには(ステップS28:NO)、半田付け部位の濡れ量が不良であると判定する(ステップS30)。つまり、図11に示すように、半田付け部位(フィレット)74の濡れ量が不足している場合(ランド73が露出している場合)には、ランド73に対して白色LED21(図1参照)が照射した光がCCDカメラ30に入射され易くなる。このため、撮影された画像中の第2の判定領域82内では白色領域の占める割合は多くなる。従って、CPU51は、白色領域が第2閾値以下とはならないため(第2閾値以上となるため)、半田付け部位74の半田量が不良であると判定する。この処理を終了すると、CPU51は、第1判定処理を終了する。
このように、CPU51は、第1の判定領域81の外側で、且つ少なくともランド73を含む所定の領域を第2の判定領域82とし、第2の判定領域82中に含まれる白色領域に基づいて、半田付け部位74の濡れ量の良否を判定する。このため、半田付け部位74の濡れ量が良好であるか、又は、半田付け部位74の濡れ量が不良であるかを判定することができる。
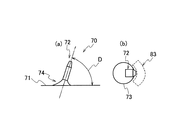
次に、図12から図14を参照して、リード72がランド73に対して所定角度傾斜する方向に固定して半田付けされている場合における傾斜角度の良否の判定について説明する。図12は、本発明の実施形態に係る基板検査装置による第2判定処理のフローチャートを示す図である。図13(a)は、本発明の実施形態に係る基板検査装置が、リードの傾斜角度が良好と判定する場合を示す図である。図13(b)は、本発明の実施形態に係る基板検査装置が、リードの傾斜角度が良好と判定する場合の半田付け部位の上面図である。図14(a)は、本発明の実施形態に係る基板検査装置が、リードの傾斜角度が不良と判定する場合を示す図である。図14(b)は、本発明の実施形態に係る基板検査装置が、リードの傾斜角度が不良と判定する場合の半田付け部位の上面図である。
図12に示すように、はじめに、CPU51は、第3の判定領域を設定する(ステップS41)、具体的にCPU51は、図13(a)に示すように、電子部品のリード72が基板面71に形成されたランド73に対して所定角度傾斜する方向に固定して半田付けされている場合において、図13(b)に示すように、ランド73の円周で囲まれる領域の外側となる領域に、リード72の傾斜方向を基準とした第3の判定領域83を設定する。
次に、CPU51は、着色領域を抽出する(ステップS42)。具体的にCPU51は、図13(b)に示すように、第3の判定領域83内で、着色領域(赤色に撮影された領域)を抽出する。つまり、第3の判定領域83内で着色領域の占める割合を求める。
次に、CPU51は、着色領域は第3閾値以上か否かを判定する(ステップS43)。つまり、図13(b)に示す第3の判定領域内で着色領域の占める割合が第3閾値以上(例えば、第3の判定領域83内で着色領域が占める割合が80%以上)であるか否かを判定する。CPU51は、着色領域が第3閾値以上であると判定したときには(ステップS43:NO)、リード72の傾斜角度は良好と判定する(ステップS44)。
例えば、図13(a)に示すように、リード72がランド73に対して傾斜する角度が良好の場合には、図13(b)に示す撮影された画像中の第3の判定領域83内には、赤色LED21(図1参照)が照射されたリード72が撮影される。このため、図13(b)に示す撮影された画像中の第3の判定領域83内では、着色領域の占める割合は多くなる。従って、図13(a)に示す場合、着色領域が第3閾値以上となるため(第3閾値以下となるため)、CPU51は、リード72がランド73に対して傾斜する角度が良好であると判定する。この処理を終了すると、CPU51は、第2判定処理を終了する。
一方、CPU51は、着色領域が第3閾値以上ではないと判定した場合には(ステップS43:NO)、リード72がランド73に対して傾斜する角度が不良と判定する(ステップS45)。
例えば、図14(a)に示すように、リード72がランド73に対して傾斜する角度が大きく、傾斜角度が不良の場合(図14(a)に示す矢印D参照)には、図14(b)に示す撮影された画像中の第3の判定領域83内では、赤色LED21(図1参照)が照射されたリード72が撮影されない。このため、図14(b)に示す撮影された画像中の第3の判定領域83内では、着色領域の占める割合は少なくなる。つまり、図14(a)に示す例では、リード72が傾斜する角度が大きいため、第3の判定領域83にはリード72が撮影されない。従って、図14(a)に示す場合、着色領域が第3閾値以上とならないため(第3閾値以下となるため)、CPU51は、リード72がランド73に対して傾斜する角度が不良であると判定する。この処理を終了すると、CPU51は、第2判定処理を終了する。
このように、CPU51は、基板面71に白色光を照射する白色LED13と、基板面71に対して略平行な方向に向けて着色光を出射する赤色LED21とを同時に発光させてCCDカメラ30により撮影する。リード72がランド73に対して所定角度傾斜している場合、CCDカメラ30により撮影された画像は、傾斜したリード72に対応する部分が着色される。このため、リード72を鮮明に識別することが可能となり、高精度に半田付け状態を検査することができる。
また、ランド73の円周で囲まれる領域の外側で、リード72の傾斜方向を基準とした第3の判定領域83内で着色領域が占める割合が第3の閾値以上の場合に、リード72がランド73に対して傾斜する角度が良好であると判定する。このため、リード72がランド73に対して傾斜する角度が良好であるか、又は、リード72がランド73に対して傾斜する角度が大きいかを判定することができる。
このようにして、本発明の実施形態に係る基板検査装置1は、基板面71と対峙して配置され、内面が反射面12とされたドーム形状をなす反射部材11と、反射部材11の基板側周囲部15に複数個設置され、反射面12側に白色光を出射することにより、間接的に基板面71に白色光を照射する白色LED13と、基板面71と対峙して配置され、基板面71を撮影するCCDカメラ30と、白色LED13を発光させて、CCDカメラ30による基板面71の撮影を行い、撮影された画像中の少なくともリード部分を含む所定の領域を第1の判定領域83と設定し、第1の判定領域83中に含まれる白色領域を求め、白色領域が第1閾値以下である場合に、リード71の状態を判定するCPU51と、を有する。
また、本発明の実施形態に係る基板検査装置1は、CPU51は、第1の判定領域81の外側で、且つ少なくともランド73を含む所定の領域を第2の判定領域82として設定し、第2の判定領域82内で、白色領域の占める割合が第2閾値以上である場合には、半田付けの濡れ量が不足していると判定する。
さらに、本発明の実施形態に係る基板検査装置1は、基板面71と対峙して配置され、内面が反射面12とされたドーム形状をなす反射部材11と、反射部材11の基板側周囲部15に複数個設置され、反射面12側に白色光を出射することにより、間接的に基板面71に白色光を照射する白色LED13と、反射部材11の基板側周囲部15に複数個設置され、基板面71に対して略平行な方向に向けて着色光を出射する赤色LED21と、基板面71と対峙して配置され、基板面71を撮影するCCDカメラ30と、白色LED13及び赤色LED21を同時に発光させて、CCDカメラ30による基板面71の撮影を行い、撮影された画像中のランド73の円周で囲まれる領域の外側となる領域に、リード72の傾斜方向を基準とした第3の判定領域83を設定し、第3の判定領域83中に含まれる着色領域を求め、第3の判定領域83中に含まれる着色領域が第3閾値以上である場合に、リード72がランド73に対して傾斜する角度が良好であると判定するCPU51と、を有する。
また、本発明の実施形態に係る基板検査装置1は、反射部材11は、中央部が開口され、CCDカメラ30は、開口部16に設けられる。
そして、本発明の実施形態に係る基板検査装置1によれば、反射面12側に白色光を出射することにより、間接的に基板面71に白色光を照射する白色LED13を発光させてCCDカメラ30により撮影する。リード71がランド73に対して直交する方向に固定されている場合、CCDカメラ30により撮影された画像は、リード72の先端72aに対応する部分は白色で撮影され、リード72の傾斜面72bは黒色に撮影される。このため、リード72を鮮明に識別することが可能となり、高精度に基板70を検査することができる。
また、少なくともリード72部分を含む所定の領域を第1の判定領域81とし、第1の判定領域81中に含まれる白色領域に基づいて、リード72の状態を判定する。このため、設定する領域を変更することにより、リード72の半田付け状態の良否や、半田付け部位74の濡れ量を検査することが可能となる。
従って、リード72を鮮明に識別することにより、検査の精度を向上した基板検査装置1を提供することができる。
また、本発明の実施形態に係る基板検査装置1によれば、第1の判定領域81の外側で、且つ少なくともランド73を含む所定の領域を第2の判定領域82とし、第2の判定領域82中に含まれる白色領域に基づいて、半田付けの濡れ量の良否を判定する。このため、半田付け部位74の濡れ量が良好であるか、又は、半田付け部位74の濡れ量が不良であるかを判定することができる。
さらに、本発明の実施形態に係る基板検査装置1によれば、基板面71に白色光を照射する白色LED13と、基板面71に対して略平行な方向に向けて着色光を出射する赤色LED21とを同時に発光させてCCDカメラ30により撮影する。リード72がランド73に対して所定角度傾斜している場合、CCDカメラ30により撮影された画像は、傾斜したリード72に対応する部分が着色される。このため、リード72を鮮明に識別することが可能となり、高精度に半田付け状態を検査することができる。
また、ランド73の円周で囲まれる領域の外側で、リード72の傾斜方向を基準とした第3の判定領域83内で着色領域が占める割合が第3の閾値以上での場合に、リード72がランド73に対して傾斜する角度が良好であると判定する。このため、リード72がランド73に対して傾斜する角度が良好であるか、又は、リード72がランド73に対して傾斜する角度が大きいかを判定することができる。
また、本発明の基板検査装置1によれば、CCDカメラ30は、反射部材11の中央部が開口された開口部16に設けられている。このため、半田付け部位74に照射された光を基板面71と対峙した位置から撮影することにより、高精度に基板70の検査することができる。
以上、本発明の基板検査装置を図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置き換えることができる。
例えば、上述した実施形態では、反射部材11の開口部16にCCDカメラ30が設けられている場合について説明したが、CCDカメラ30をドーム照明10の内部に基板面71と対峙して設けるように構成してもよい。また、反射部材11の開口部16をガラス等で覆い、CCDカメラ20をガラス等の上側に基板面71と対峙して設けるように構成してもよい。
また、例えば、上述した実施形態では、赤色LED21により、着色光を出射する場合について説明したが、着色光を出射する光源であれば、青色LED、緑色LED、黄色LED等により着色光を出射するように構成してもよい。