以下、本発明を、電子写真方式の複写機(以下、単に複写機という)に適用した実施形態について説明する。
まず、実施形態に係る複写機の基本的な構成について説明する。図1は、実施形態に係る複写機を示す概略構成図である。この複写機は、画像形成部1と、白紙供給装置40と、原稿搬送読取ユニット50とを備えている。原稿読取装置としての原稿搬送読取ユニット50は、画像形成部1の上に固定されたスキャナ150と、これに支持される原稿搬送装置たるADF51とを有している。
白紙供給装置40は、ペーパーバンク41内に多段に配設された2つの給紙カセット42、給紙カセットから転写紙を送り出す送出ローラ43、送り出された転写紙を分離して給紙路44に供給する分離ローラ45等を有している。また、画像形成部1の給紙路37に転写紙を搬送する複数の搬送ローラ47等も有している。そして、給紙カセット内の転写紙を画像形成部1内の給紙路37内に給紙する。
図2は、画像形成部の内部構成の一部を拡大して示す部分拡大構成図である。画像形成手段としての画像形成部1は、光書込装置2、K,Y,M,C色のトナー像を形成する4つのプロセスユニット3K,Y,M,C、転写ユニット24、紙搬送ユニット28、レジストローラ対33、定着装置34、スイッチバック装置36、給紙路37等を備えている。そして、光書込装置2内に配設された図示しないレーザーダイオードやLED等の光源を駆動して、ドラム状の4つの感光体4K,Y,M,Cに向けてレーザー光Lを照射する。この照射により、感光体4K,Y,M,Cの表面には静電潜像が形成され、この潜像は所定の現像プロセスを経由してトナー像に現像される。なお、符号の後に付されたK,Y,M,Cという添字は、ブラック,イエロー,マゼンタ,シアン用の仕様であることを示している。
プロセスユニット3K,Y,M,Cは、それぞれ、感光体とその周囲に配設される各種装置とを1つのユニットとして共通の支持体に支持するものであり、画像形成部1本体に対して着脱可能になっている。ブラック用のプロセスユニット3Kを例にすると、これは、感光体4Kの他、これの表面に形成された静電潜像をブラックトナー像に現像するための現像装置6Kを有している。また、後述するK用の1次転写ニップを通過した後の感光体4K表面に付着している転写残トナーをクリーニングするドラムクリーニング装置15なども有している。本複写機では、4つのプロセスユニット3K,Y,M,Cを、後述する中間転写ベルト25に対してその無端移動方向に沿って並べるように対向配設した、いわゆるタンデム型の構成になっている。
図3は、4つのプロセスユニット3K,Y,M,Cからなるタンデム部の一部を示す部分拡大図である。なお、4つのプロセスユニット3K,Y,M,Cは、それぞれ使用するトナーの色が異なる他はほぼ同様の構成になっているので、同図においては各符号に付すK,Y,M,Cという添字を省略している。同図に示すように、プロセスユニット3は、感光体4の周りに、帯電装置23、現像装置6、ドラムクリーニング装置15、除電ランプ22等を有している。
感光体4としては、アルミニウム等の素管に、感光性を有する有機感光材の塗布による感光層を形成したドラム状のものを用いている。但し、無端ベルト状のものを用いても良い。
現像装置6は、図示しない磁性キャリアと非磁性トナーとを含有する二成分現像剤を用いて潜像を現像するようになっている。内部に収容している二成分現像剤を攪拌しながら搬送して現像スリーブ12に供給する攪拌部7と、現像スリーブ12に担持された二成分現像剤中のトナーを感光体4に転移させるための現像部11とを有している。
攪拌部7は、現像部11よりも低い位置に設けられており、互いに平行配設された2本の搬送スクリュウ8、これらスクリュウ間に設けられた仕切り板、現像ケース9の底面に設けられたトナー濃度センサー10などを有している。
現像部11は、現像ケース9の開口を通して感光体4に対向する現像スリーブ12、これの内部に回転不能に設けられたマグネットローラ13、現像スリーブ12に先端を接近させるドクタブレード14などを有している。現像スリーブ12は、非磁性の回転可能な筒状になっている。マグネットローラ12は、ドクタブレード14との対向位置からスリーブの回転方向に向けて順次並ぶ複数の磁極を有している。これら磁極は、それぞれスリーブ上の二成分現像剤に対して回転方向の所定位置で磁力を作用させる。これにより、攪拌部7から送られてくる二成分現像剤を現像スリーブ13表面に引き寄せて担持させるとともに、スリーブ表面上で磁力線に沿った磁気ブラシを形成する。
磁気ブラシは、現像スリーブ12の回転に伴ってドクタブレード14との対向位置を通過する際に適正な層厚に規制されてから、感光体4に対向する現像領域に搬送される。そして、現像スリーブ12に印加される現像バイアスと、感光体4の静電潜像との電位差によってトナーを静電潜像上に転移させて現像に寄与する。更に、現像スリーブ12の回転に伴って再び現像部11内に戻り、マグネットローラ13の磁極間に形成される反発磁界の影響によってスリーブ表面から離脱した後、攪拌部7内に戻される。攪拌部7内には、トナー濃度センサー10による検知結果に基づいて、二成分現像剤に適量のトナーが補給される。なお、現像装置6として、二成分現像剤を用いるものの代わりに、磁性キャリアを含まない一成分現像剤を用いるものを採用してもよい。
ドラムクリーニング装置15としては、ポリウレタンゴム製のクリーニングブレード16を感光体4に押し当てる方式のものを用いているが、他の方式のものを用いてもよい。クリーニング性を高める目的で、本例では、外周面を感光体4に接触させる接触導電性のファーブラシ17を、図中矢印方向に回転自在に有する方式のものを採用している。このファーブラシ17は、図示しない固形潤滑剤から潤滑剤を掻き取って微粉末にしながら感光体4表面に塗布する役割も兼ねている。ファーブラシ17にバイアスを印加する金属製の電界ローラ18を図中矢示方向に回転自在に設け、これにスクレーパ19の先端を押し当てている。ファーブラシ17に付着したトナーは、ファーブラシ17に対してカウンタ方向に接触して回転しながらバイアスが印加される電界ローラ18に転位する。そして、スクレーパ19によって電界ローラ18から掻き取られた後、回収スクリュウ20上に落下する。回収スクリュウ20は、回収トナーをドラムクリーニング装置15における図紙面と直交する方向の端部に向けて搬送して、外部のリサイクル搬送装置21に受け渡す。リサイクル搬送装置21は、受け渡されたトナーを現像装置15に送ってリサイクルする。
除電ランプ22は、光照射によって感光体4を除電する。除電された感光体4の表面は、帯電装置23によって一様に帯電せしめられた後、光書込装置2による光書込処理がなされる。なお、帯電装置23としては、帯電バイアスが印加される帯電ローラを感光体4に当接させながら回転させるものを用いている。感光体4に対して非接触で帯電処理を行うスコロトロンチャージャ等を用いてもよい。
先に示した図2において、4つのプロセスユニット3K,Y,M,Cの感光体4K,Y,M,Cには、これまで説明してきたプロセスによってK,Y,M,Cトナー像が形成される。
4つのプロセスユニット3K,Y,M,Cの下方には、転写ユニット24が配設されている。この転写ユニット24は、複数のローラによって張架した中間転写ベルト25を、感光体4K,Y,M,Cに当接させながら図中時計回り方向に無端移動させる。これにより、感光体4K,Y,M,Cと中間転写ベルト25とが当接するK,Y,M,C用の1次転写ニップが形成されている。K,Y,M,C用の1次転写ニップの近傍では、ベルトループ内側に配設された1次転写ローラ26K,Y,M,Cによって中間転写ベルト25を感光体4K,Y,M,Cに向けて押圧している。これら1次転写ローラ26K,Y,M,Cには、それぞれ図示しない電源によって1次転写バイアスが印加されている。これにより、K,Y,M,C用の1次転写ニップには、感光体4K,Y,M,C上のトナー像を中間転写ベルト25に向けて静電移動させる1次転写電界が形成されている。図中時計回り方向の無端移動に伴ってK,Y,M,C用の1次転写ニップを順次通過していく中間転写ベルト25のおもて面には、各1次転写ニップでトナー像が順次重ね合わせて1次転写される。この重ね合わせの1次転写により、中間転写ベルト25のおもて面には4色重ね合わせトナー像(以下、4色トナー像という)が形成される。
転写ユニット24の図中下方には、駆動ローラ30と2次転写ローラ31との間に、無端状の紙搬送ベルト29を掛け渡して無端移動させる紙搬送ユニット28が設けられている。そして、自らの2次転写ローラ31と、転写ユニット24の下部張架ローラ27との間に、中間転写ベルト25及び紙搬送ベルト29を挟み込んでいる。これにより、中間転写ベルト25のおもて面と、紙搬送ベルト29のおもて面とが当接する2次転写ニップが形成されている。2次転写ローラ31には図示しない電源によって2次転写バイアスが印加されている。一方、転写ユニット24の下部張架ローラ27は接地されている。これにより、2次転写ニップに2次転写電界が形成されている。
この2次転写ニップの図中右側方には、レジストローラ対33が配設されており、ローラ間に挟み込んだ転写紙を中間転写ベルト25上の4色トナー像に同期させ得るタイミングで2次転写ニップに送り出す。2次転写ニップ内では、中間転写ベルト25上の4色トナー像が2次転写電界やニップ圧の影響によって転写紙に一括2次転写され、転写紙の白色と相まってフルカラー画像となる。2次転写ニップを通過した転写紙は、中間転写ベルト25から離間して、紙搬送ベルト29のおもて面に保持されながら、その無端移動に伴って定着装置34へと搬送される。
2次転写ニップを通過した中間転写ベルト25の表面には、2次転写ニップで転写紙に転写されなかった転写残トナーが付着している。この転写残トナーは、中間転写ベルト25に当接するベルトクリーニング装置によって掻き取り除去される。
定着装置34に搬送された転写紙は、定着装置34内における加圧や加熱によってフルカラー画像が定着させしめられた後、定着装置34から排紙ローラ対35に送られた後、機外へと排出される。
先に示した図1において、紙搬送ユニット22および定着装置34の下には、スイッチバック装置36が配設されている。これにより、片面に対する画像定着処理を終えた転写紙が、切換爪で転写紙の進路を転写紙反転装置側に切り換えられ、そこで反転されて再び2次転写転写ニップに進入する。そして、もう片面にも画像の2次転写処理と定着処理とが施された後、排紙トレイ上に排紙される。
画像形成部1の上に固定されたスキャナ150は、第1面読取手段としての第1面固定読取部151や、第1面読取手段としての移動読取部152を有している。
第1面読取手段としての移動読取部152は、原稿MSに接触するようにスキャナ150のケーシング上壁に固定された図示しない第2コンタクトガラスの直下に配設されており、光源や、反射ミラーなどからなる光学系を図中左右方向に移動させることができる。そして、光学系を図中左側から右側に移動させていく過程で、光源から発した光を第2コンタクトガラス上に載置された図示しない原稿で反射させた後、複数の反射ミラーを経由させて、スキャナ本体に固定された画像読取センサー153で受光する。
第1面読取手段としての第1面固定読取部151は、原稿MSに接触するようにスキャナ150のケーシング上壁に固定された図示しない第1コンタクトガラスの直下に配設されている。そして、後述するADF51によって搬送される原稿MSが第1コンタクトガラス上を通過する際に、光源から発した光を原稿面で順次反射させながら、複数の反射ミラーを経由させて画像読取センサーで受光する。これにより、光源や反射ミラー等からなる光学系を移動させることなく、原稿MSの第1面を走査する。
また、スキャナ150は、原稿MSの第2面を読み取る密着型イメージセンサーも有している。この密着型イメージセンサーについては後述する。
スキャナ150の上に配設されたADF51は、本体カバー52に、読取前の原稿MSを載置するための原稿載置台53、原稿MSを搬送するための搬送ユニット54、読取後の原稿MSをスタックするための原稿スタック台55などを保持している。図4に示すように、スキャナ150に固定された蝶番159によって上下方向に揺動可能に支持されている。そして、その揺動によって開閉扉のような動きをとり、開かれた状態でスキャナ150の上面の第1コンタクトガラス154や第2コンタクトガラス155を露出させる。原稿束の片隅を綴じた本などの片綴じ原稿の場合には、原稿を1枚ずつ分離することができないため、ADFによる搬送を行うことができない。そこで、片綴じ原稿の場合には、ADF51を図4に示すように開いた後、読み取らせたいページが見開かれた片綴じ原稿を下向きにして第2コンタクトガラス154上に載せた後、ADFを閉じる。そして、スキャナ150の図1に示した移動読取部152によってそのページの画像を読み取らせる。
一方、互いに独立した複数の原稿MSを単に積み重ねた原稿束の場合には、その原稿MSをADF51によって1枚ずつ自動搬送しながら、スキャナ150内の第1面固定読取部151やADF51内の密着型イメージセンサーに順次読み取らせていくことができる。この場合、原稿束を原稿載置台53上にセットした後、図示しないコピースタートボタンを押す。すると、ADF51が、原稿載置台53上に載置された原稿束の原稿MSを上から順に搬送ユニット54内に送り、それを反転させながら原稿スタック台55に向けて搬送する。この搬送の過程で、原稿MSを反転させた直後にスキャナ150の第1面固定読取部151の真上に通す。このとき、原稿MSの第1面の画像がスキャナ150の第1面固定読取部151によって読み取られる。
図5は、ADF51の要部構成をスキャナ150の上部とともに示す拡大構成図である。また、図6は、ADF51及びスキャナ150の電気回路の一部を示すブロック図である。ADF51は、原稿セット部A、分離給送部B、レジスト部C、ターン部D、第1読取搬送部E、第2読取搬送部F、排紙部G、スタック部H等を備えている。
図6に示すように、ADF(51)は、ASIC(Application Specific Integrated Circuit)等からなるコントローラ64を有しており、これによって各種の機器やセンサーを制御することができる。このコントローラ64には、レジストセンサー65、原稿セットセンサー63、排紙センサー61、突き当てセンサー72、原稿幅センサー73、読取位置口センサー67、テーブル上昇センサー59、ローラホームポジションセンサー203などが接続されている。また、密着型イメージセンサー95、ピックアップモータ56、給紙モータ76、読取モータ77、排紙モータ78、底板上昇モータ79、ソレノイド204、ローラ移動モータ205なども接続されている。また、スキャナの各機器の制御を司る本体制御部200なども接続されている。スキャナ(150)は、図示しないCPU(Central Processing Unit)やRAM(Random Access Memory)等からなる本体制御部200を有しており、これにより、スキャナ150内部の図示しない各種機器やセンサーを制御することができる。また、I/F202によってADF(51)のコントローラ64と接続されており、コントローラ64を介して、ADF51内の各種機器やセンサーを間接的に制御することもできる。
図5において、原稿セット部Aは、原稿MSの束がセットされる原稿載置台53等を有している。また、分離給送部Bは、セットされた原稿MSの束から原稿MSを一枚ずつ分離して給送するものである。また、レジスト部Cは、給送された原稿MSに一時的に突き当たって原稿MSを整合した後に送り出すものである。また、ターン部Dは、C字状に湾曲する湾曲搬送部を有しており、この湾曲搬送部内で原稿MSを折り返しながらその上下を反転させるものである。また、第1読取搬送部Eは、第1コンタクトガラス155の上で原稿MSを搬送しながら、第1コンタクトガラス155の下方で図示しないスキャナの内部に配設されている第1固定読取部151に原稿MSの第1面を読み取らせるものである。また、第2読取搬送部Fは、密着型イメージセンサー95の下で原稿MSを搬送しながら、原稿MSの第2面を密着型イメージセンサー95に読み取らせるものである。また、排紙部Gは、両面の画像が読み取られた原稿MSをスタック部Hに向けて排出するものである。また、スタック部Hは、スタック台55の上に原稿MSをスタックするものである。
原稿MSは、原稿MSの束の厚みに応じて図中矢印a、b方向に揺動可能な可動原稿テーブル54の上に原稿先端部が載せられるとともに、原稿後端側が原稿載置台53の上に載せられた状態でセットされる。このとき、原稿載置台53上において、その幅方向(図紙面に直交する方向)の両端に対してそれぞれ図示しないサイドガイドが突き当てられることで、幅方向における位置が調整される。このようにしてセットされる原稿MSは、可動原稿テーブル54の上方で揺動可能に配設されたレバー部材62を押し上げる。すると、それに伴って原稿セットセンサー63が原稿MSのセットを検知して、検知信号をコントローラ64に送信する。そして、この検知信号は、コントローラ64からI/F202を介して本体制御部111に送られる。
原稿載置台53には、原稿MSの搬送方向の長さを検知する反射型フォトセンサー又はアクチュエーター・タイプのセンサーからなる第1長さセンサー57、第2長さセンサー58が保持されている。これら長さセンサーにより、原稿MSの搬送方向の長さが検知される。
可動原稿テーブル54の上に載置された原稿MSの束の上方には、カム機構によって上下方向(図中矢印c,d方向)に移動可能に支持されるピックアップローラ80が配設されている。このカム機構は、ピックアップモータ56によって駆動することで、ピックアップローラ80を上下移動させることが可能である。ピックアップローラ80が上昇移動すると、それに伴って可動原稿テーブル54が図中矢印a方向に揺動して、ピックアップローラ80が原稿MSの束における一番上の原稿MSに当接する。更に可動原稿テーブル54が上昇すると、やがてテーブル上昇検知センサー59によって可動原稿テーブル54の上限までの上昇が検知される。これにより、ピックアップモータ56が停止するとともに、可動原稿テーブル54の上昇が停止する。
複写機の本体に設けられたテンキーやディスプレイ等からなる本体操作部201に対しては、操作者によって両面読取モードか、あるいは片面読取モードかを示す読取モード設定のためのキー操作や、コピースタートキーの押下操作などが行われる。即ち、本体操作部201は、両面読取モードであるのか、あるいは片面読取モードであるのかの情報を取得するモード情報取得手段として機能している。コピースタートキーが押下されると、本体制御部200からI/F202を介してADF51のコントローラ64に原稿給紙信号が送信される。すると、ピックアップローラ80が給紙モータ76の正転によって回転駆動して、可動原稿テーブル54上の原稿MSを可動原稿テーブル54上から送り出す。
両面読取モードか、片面読取モードかの設定に際しては、可動原稿テーブル54上に載置された全ての原稿MSについて一括して両面、片面の設定を行うことが可能である。また、1枚目及び10枚目の原稿MSについては両面読取モードに設定する一方で、その他の原稿MSについては片面読取モードに設定するなどといった具合に、個々の原稿MSについてそれぞれ個別に読取モードを設定することも可能である。
ピックアップローラ80によって送り出された原稿MSは、分離搬送部Bに進入して、給紙ベルト84との当接位置に送り込まれる。この給紙ベルト84は、駆動ローラ82と駆動ローラ82とによって張架されており、給紙モータ76の正転に伴う駆動ローラ82の回転によって図中時計回り方向に無端移動せしめられる。この給紙ベルト84の下部張架面には、給紙モータ76の正転によって図中時計回りに回転駆動されるリバースローラ85が当接している。当接部においては、給紙ベルト84の表面が給紙方向に移動する。これに対し、リバースローラ85は、給紙ベルト84に所定の圧力で当接しており、給紙ベルト84に直接当接している際、あるいは当接部に原稿MSが1枚だけ挟み込まれている際には、ベルト又は原稿MSに連れ回る。但し、当接部に複数枚の原稿MSが挟み込まれた際には、連れ回り力がトルクリミッターのトルクよりも低くなることから、連れ回り方向とは逆の図中時計回りに回転駆動する。これにより、最上位よりも下の原稿MSには、リバースローラ85によって給紙とは反対方向の移動力が付与されて、数枚の原稿から最上位の原稿MSだけが分離される。
給紙ベルト84やリバースローラ85の働きによって1枚に分離された原稿MSは、レジスト部Cに進入する。そして、突き当てセンサー72の直下を通過する際にその先端が検知される。このとき、ピックアップモータ56の駆動力を受けているピックアップローラ80がまだ回転駆動しているが、可動原稿テーブル54の下降によって原稿MSから離間するため、原稿MSは給紙ベルト84の無端移動力のみによって搬送される。そして、突き当てセンサー72によって原稿MSの先端が検知されたタイミングから所定時間だけ給紙ベルト84の無端移動が継続して、原稿MSの先端がプルアウト駆動ローラ86とこれに当接しながら回転駆動するプルウト駆動ローラ87との当接部に突き当たる。原稿MSの先端が両ローラの当接部に突き当たった状態で、原稿MSの後端側が給紙方向に向けて送られることで、原稿MSは所定量だけ撓んだ状態になりながら、先端が当接部に位置決めされる。これにより、原稿MSのスキュー(傾き)が補正されて、原稿MSは給紙方向に沿った姿勢になる。
プルアウト従動ローラ87は、原稿MSのスキューを補正する役割の他に、スキューが補正された原稿MSを原稿搬送方向下流側の中間ローラ対66まで搬送する役割を担っており、給紙モータ76の逆転によって回転駆動される。給紙モータ76が逆転すると、プルアウト従動ローラ87と、互いに当接している中間ローラ対66における一方のローラとが回転を開始するとともに、給紙ベルト84の無端移動が停止する。また、このとき、ピックアップローラ80の回転も停止される。
プルアウト従動ローラ87から送り出された原稿MSは、原稿幅センサー73の直下を通過する。原稿幅センサー73は、反射型フォトセンサー等からなる紙検知部を複数有しており、これら紙検知部は原稿幅方向(図紙面に直交する方向)に並んでいる。どの紙検知部が原稿MSを検知するのかに基づいて、原稿MSの幅方向のサイズが検知される。また、原稿MSの搬送方向の長さは、原稿MSの先端が突き当てセンサー72によって検知されてから、原稿MSの後端が突き当てセンサー72によって検知されなくなるまでのタイミングに基づいて検知される。
原稿幅センサー73によって幅方向のサイズが検知された原稿MSの先端は、ターン部Dに進入して、中間ローラ対66のローラ間の当接部に挟み込まれる。この中間ローラ対66による原稿MSの搬送速度は、後述する第1読取搬送部Eでの原稿MSの搬送速度よりも高速に設定されている。これにより、原稿MSを第1読取搬送部Eに送り込むまでの時間の短縮化が図られている。
ターン部D内を搬送される原稿MSの先端は、原稿先端が読取入口センサー67との対向位置を通過する。これによって原稿MSの先端が読取入口センサー67によって検知されると、その先端が搬送方向下流側の読取入口ローラ対(89と90との対)の位置まで搬送される間での間に、中間ローラ対66による原稿搬送速度が減速される。また、読取モータ77の回転駆動の開始に伴って、読取入口ローラ対(89,90)における一方のローラ、読取出口ローラ対92における一方のローラ、第2読取出口ローラ対93における一方のローラがそれぞれ回転駆動を開始する。
ターン部D内においては、原稿MSが中間ローラ対66と読取入口ローラ対(89、90)との間の湾曲搬送路で搬送される間に上下面が逆転されるとともに、搬送方向が折り返される。そして、読取入口ローラ対(89、90)のローラ間のニップを通過した原稿MSの先端は、レジストセンサー65の直下を通過する。このとき原稿MSの先端がレジストセンサー65によって検知されると、所定の搬送距離をかけながら原稿搬送速度が減速されていき、第1読取搬送部Eの手前で原稿MSの搬送が一時停止される。また、本体制御部200にI/F202を介してレジスト停止信号が送信される。
レジスト停止信号を受けた本体制御部200が読取開始信号を送信すると、コントローラ64の制御により、原稿MSの先端が第1読取搬送部E内に到達するまで、読取モータ77の回転が再開されて所定の搬送速度まで原稿MSの搬送速度が増速される。そして、読取モータ77のパルスカウントに基づいて算出された原稿MSの先端が第1固定読取部151による読取位置に到達するタイミングで、コントローラ64から本体制御部200に対して原稿MSの第1面の副走査方向有効画像領域を示すゲート信号が送信される。この送信は、原稿MSの後端が第1固定読取部151による読取位置を抜け出るまで続けられ、原稿MSの第1面が第1固定読取部151によって読み取られる。
第1読取搬送部Eを通過した原稿MSは、後述の読取出口ローラ対92を経由した後、その先端が排紙センサー61によって検知される。片面読取モードが設定されている場合には、後述する密着型イメージセンサー95による原稿MSの第2面の読取が不要である。そこで、排紙センサー61によって原稿MSの先端が検知されると、排紙モータ78の正転駆動が開始されて、排紙ローラ対94における図中下側の排紙ローラが図中時計回り方向に回転駆動される。また、排紙センサー61によって原稿MSの先端が検知されてからの排紙モータパルスカウントに基づいて、原稿MSの後端が排紙ローラ対94のニップを抜け出るタイミングが演算される。そして、この演算結果に基づいて、原稿MSの後端が排紙ローラ対94のニップから抜け出る直前のタイミングで、排紙モータ78の駆動速度が減速せしめられて、原稿MSがスタック台55から飛び出さないような速度で排紙される。
一方、両面読取モードが設定されている場合には、排紙センサー61によって原稿MSの先端が検知された後、密着型イメージセンサー95に到達するまでのタイミングが読取モータ77のパルスカウントに基づいて演算される。そして、そのタイミングでコントローラ64から本体制御部200に対して原稿MSの第2面における副走査方向の有効画像領域を示すゲート信号が送信される。この送信は、原稿MSの後端が密着型イメージセンサー95による読取位置を抜け出るまで続けられ、原稿MSの第2面が密着型イメージセンサー95によって読み取られる。
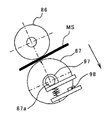
第2面読取手段としての密着型イメージセンサー95は、密着型イメージセンサー(CIS)からなり、原稿MSに付着している糊状の異物が読取面に付着することによる読取縦すじを防止する目的で、読取面にコーティング処理が施されている。密着型イメージセンサー95との対向位置には、原稿MSを非読取面側(第1面側)から支持する原稿支持手段としての第2読取ローラ96が配設されている。この第2読取ローラ96は、密着型イメージセンサー95による読取位置での原稿MSの浮きを防止するとともに、密着型イメージセンサー95におけるシェーディングデータを取得するための基準白部として機能する役割を担っている。本複写機では、密着型イメージセンサー95との対向位置で原稿を支持する原稿支持手段として、第2読取ローラ96を用いたが、ガイド板状のものを用いてもよい。
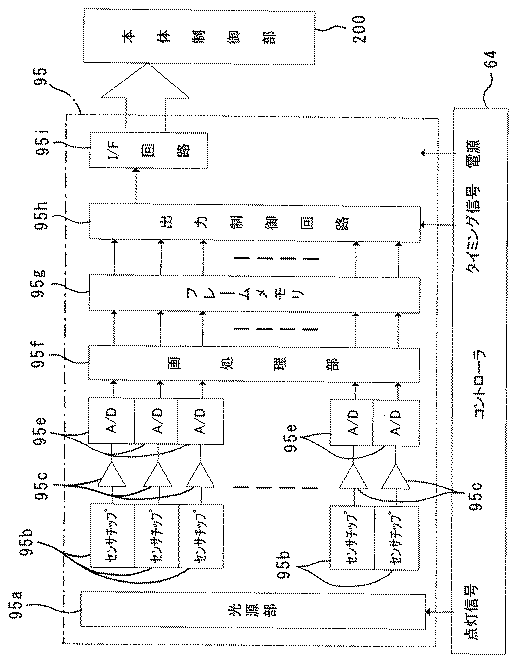
図7は、密着型イメージセンサー95の電気回路の要部を示すブロック図である。同図に示すように、密着型イメージセンサー95は、LEDアレイ、蛍光灯、あるいは冷陰極管などからなる光源部95aを有している。また、主走査方向(原稿幅方向に対応する方向)に並ぶ複数のセンサーチップ95b、それぞれのセンサーチップ95bに個別に接続された複数のOPアンプ回路95c、それぞれのOPアンプ回路95cに個別に接続された複数のA/Dコンバータ95eも有している。更には、画像処理部95f、フレームメモリ95g、出力制御回路95h、I/F回路95iなども有している。
センサーチップ95bは、等倍密着イメージセンサーと称される光電変換素子と集光レンズとを具備するものである。密着型イメージセンサー95による読取位置に図示しない原稿が進入するのに先立って、コントローラ64から光源部95aに点灯ON信号が送られる。これにより、光源部95aが点灯し、その光を図示しない原稿の第2面に向けて照射する。原稿の第2面で反射した反射光は、複数のセンサーチップ95bにおいて、集光レンズによって光電変換素子に集光されて画像情報として読み取られる。それぞれのセンサーチップ95bで読み取られた画像情報は、OPアンプ回路95cによって増幅された後、A/Dコンバータ95eによってデジタル画像情報に変換される。これらデジタル画像情報は、画像処理部95fに入力されてシェーディング補正などが施された後、フレームメモリ95gに一時記憶される。その後、出力制御回路95hによって本体制御部200に受入可能なデータ形式に変換された後、I/F回路95iを経由して本体制御部200に出力される。なお、コントローラ64からは原稿の先端が密着型イメージセンサー95による読取位置に到達するタイミング(そのタイミング以降の画像データが有効データとして扱われる)を知らせるためのタイミング信号や光源の点灯信号、電源等が出力されるようになっている。
本複写機のADF51は、読取手段たる密着型イメージセンサー95による読取位置に通す前の原稿MSの厚み情報を取得する厚み情報取得手段として、読取位置に通す前の原稿MSの厚みを検知する厚み検知手段を有している。この厚み検知手段は、プルアウト従動ローラ87を原稿厚み方向に移動可能に支持する支持機構や、プルアウト従動ローラ87の変位量を検知する変位センサーなどから構成される。具体的には、図8に示すように、プルアウト従動ローラ87は、ローラ部の長手方向の両端からそれぞれ突出する回転軸部材87aがそれぞれ軸受け97によって原稿厚み方向に移動可能に支持されている。プルアウト従動ローラ87とプルアウト駆動ローラ86との当接によるニップに原稿MSが進入すると、プルアウト従動ローラ87や軸受け97がその厚みに応じた分だけ図中矢印方向に移動する。この軸受け97の移動量は、被検対象の微少な移動を検知することが可能な変位センサー98によって検知される。変位センサー98は、図9に示すように、軸受け97の変位量が大きくなるほど(ローラが密着型イメージセンサーに対して遠ざかるほど)、大きな電圧を出力する。この電圧の出力は、図示しないA/Dコンバーターによってデジタル信号に変換された後、コントローラ64に送られる。コントローラ64は、密着型イメージセンサー95による読取位置に原稿MSが進入する前に、変位センサー98から送られてくる電圧値に基づいて原稿MSの厚みを検知する。より詳しくは、原稿MSがプルアウトローラ対のニップに進入する前の変位センサー98からの出力電圧値と、原稿MSがニップに進入した際の変位センサー98からの出力電圧値との差分に基づいて、原稿MSの厚みが求められる。
原稿支持部材としての第2読取ローラ96は、密着型イメージセンサー95との対向位置で、原稿厚み方向に移動可能になっている。この移動は、後述する読取支持移動機構と、コントローラ64による制御とによって行われる。そして、第2読取ローラ96が移動することで、密着型イメージセンサー95の読取面と、第2読取ローラ96との距離が調整される。
図10は、本複写機において両面読取モード時に採用される、密着型イメージセンサー95の読取面と第2読取ローラ96との距離と、原稿厚みとの関係を示すグラフである。両面読取モードが選択されている場合には、第1固定読取部151による原稿MSの第1面の読み取りに加えて、密着型イメージセンサー95による原稿MSの第2面の読み取りを行う必要がある。そして、原稿MSの第2面を密着型イメージセンサー95に密着させる必要がある。但し、原稿MSの第2面を密着型イメージセンサー95に適切に密着させるための密着型イメージセンサー95と第2読取ローラ96との距離は、原稿MSの厚みに応じて異なってくる。そこで、制御手段の一部として機能するコントローラ64は、原稿MSの厚みの検知結果に応じて、第2読取ローラ96を移動させることで、原稿MSの第2面を密着型イメージセンサー95に適切に密着させるように前述の距離を調整する。具体的には、図10のグラフで示したように、原稿MSの厚みが大きくなるほど(厚くなるほど)、前述の距離を大きくする。これにより、原稿MSの厚みが普通紙に対応するものである場合、厚紙に対応するものである場合、の何れであっても、原稿MSの第2面を適切に密着型イメージセンサー95に密着させることで、原稿MSの密着不良による読取精度の低下を回避することができる。また、原稿MSの厚みにかかわらず、原稿MSを密着型イメージセンサー95と第2読取ローラ96との間にスムーズに進入させて、原稿MSのジャムの発生を抑えることもできる。
図11は、本複写機において片面読取モード時に採用される、密着型イメージセンサー95の読取面と第2読取ローラ96との距離と、原稿厚みとの関係を示すグラフである。片面読取モードが選択されている場合には、第1固定読取部151による原稿MSの第1面の読み取りだけを行えばよく、密着型イメージセンサー95による原稿MSの第2面の読み取りは必要ない。コントローラ64は、片面読取モードの場合にも、原稿MSの厚みの検知結果に応じて第2読取ローラ96を移動させるが、両面読取モードとは異なる移動のさせ方を実行する。具体的には、図10と図11との比較からわかるように、両面読取モードの場合よりも、密着型イメージセンサー95と第2読取ローラ96との距離を大きくする。これにより、原稿MSの厚みが普通紙に対応するものである場合、厚紙に対応するものである場合、の何れであっても、次のような原稿MSの搬送を行う。即ち、原稿MSの第2面を密着型イメージセンサー95に密着させずに、密着型イメージセンサー95との対向位置で原稿MSを搬送する。これにより、片面読取モードの場合には、密着型イメージセンサー95と第2読取ローラ96との間における原稿MSのジャムの発生をより抑えることができる。更には、密着型イメージセンサー95と、原稿MSの第2面との摺擦を回避して、密着型イメージセンサー95の長寿命化を図ることもできる。
次に、本複写機の特徴的な構成について説明する。
図12は、第2読取ローラ96を回転自在に支持する支持ユニット100を示す斜視図である。また、図13は、支持ユニット100と、第2読取ローラ96の一端側とを複写機本体の側面側から示す図である。また、図14は、支持ユニット100と、第2読取ローラ96の回転軸部材とを複写機本体の正面側から示す図である。これらの図において、支持ユニット100は、第1保持部材100aと第2保持部材100cとを有している。また、第2読取ローラ96は、ポリアセタール樹脂等の白色材料からなるローラ部96aと、これの軸線方向の両端面からそれぞれ突出する回転軸部材96bとを有している。
支持ユニット100の第1保持部材100aは、図示しない密着型イメージセンサーとの対向位置を搬送される原稿の厚み方向に延在する長穴100bを有している。この長穴100bには、図13や図14に示すように、第2読取ローラ96の回転軸部材96bが挿入される。挿入された回転軸部材96bは、長穴100bの長手方向に移動することが可能である。第1保持部材100aは、このように、第2読取ローラ96を、長穴100bの長手方向に対応する原稿厚み方向に移動可能に保持する。なお、図13では、第2読取ローラ96の軸線方向の一端側しか示していないが、他端側においても、図示の支持ユニット100とは別の支持ユニットの第1保持部材により、第2読取ローラ96の他端側の回転軸部材が原稿厚み方向に移動可能に保持される。
支持ユニット100の第2保持部材100cは額縁状の形状をしており、その中央部の開口内に、第1保持部材100aを原稿厚み方向にスライド移動可能に保持する。第2読取ローラ96は、上述したように、第1保持ユニット100aによって原稿厚み方向に移動可能に保持されるが、第1保持ユニット100aが第2保持ユニット100cによってスライド移動可能に保持されることによっても、間接的に原稿厚み方向に移動可能に保持されている。
図15は、支持ユニット100及びその周囲構成を複写機本体の側面側から示す図である。また、図16は、支持ユニット100及びその周囲構成を複写機本体の正面側から示す図である。これらの図において、支持ユニット100の第1保持部材100aの底面には、付勢手段としての第1コイルバネ101の一端側が固定されている。そして、この第1コイルバネ101の他端側には、第1偏心カム102のカム面が突き当たっている。また、支持ユニット100の第2保持部材100cの底面には、付勢手段としての第2コイルバネ103の一端側が固定されている。そして、この第2コイルバネ103の他端側には、第2偏心カム104のカム面が突き当たっている。また、支持ユニット100の近傍には、回動軸105aを中心にして回動可能なアーム105が配設されている。このアーム105の長手方向の一端部には、図示しない第3偏心カムのカム面が突き当たっており、アーム105はこの第3偏心カムの回動に伴って回動軸105aを中心にして回動する。
第1保持部材101aは、第1コイルバネ101によって第2読取ローラ96に向かう方向に付勢されている。第1偏心カム102が図示しないモータの駆動によって回転すると、それに伴って、第1コイルバネ101に対する第1偏心カム102のカム面の突き当たり箇所が変化する。すると、それに伴って、第1コイルバネ101による第1保持部材101aに対する付勢力が変化する。図示のように、第1偏心カム102がその最大半径箇所を第1コイルバネ101に突き当てる回転位置で停止すると、第1偏心カム102による第1コイルバネ101に対する加圧力が最大になる。すると、第1支持部材101aの上面が図示のように、第2支持部材101cの開口上端に突き当たる。
また、第2保持部材101cは、第2コイルバネ103によって第2読取ローラ96に向かう方向に付勢されている。第2偏心カム104が図示しないモータの駆動によって回転すると、それに伴って、第2コイルバネ103に対する第2偏心カム104のカム面の突き当たり箇所が変化する。すると、それに伴って、第2コイルバネ103による第2保持部材101cに対する付勢力が変化する。図示のように、第2偏心カム104がその最大半径箇所を第2コイルバネ103に突き当てる回転位置で停止すると、第2偏心カム104による第2コイルバネ103に対する加圧力が最大になる。すると、第2支持部材101cの上面が図示のように、密着型イメージセンサー95の画像読取部のガラス面95aに当接する。
アーム105は、図中左側端部に切り欠き部を有しており、この切り欠き部の内側に第2読取ローラ96の回転軸部材96bを位置させるように配設されている。そして、自らの回動位置に応じて、回転軸部材96bを第1保持部材100aの長穴100b内で昇降させる。
このように、第1偏心カム102の回転によって第1保持部材100aを第2保持部材100c内で動かしたり、第2偏心カム104の回転によって第2保持部材100cを動かしたり、第3偏心カムの回転によって第2読取ローラ96を長穴100bの範囲内で動かしたりする。これにより、第2読取ローラ96のローラ部96aと、密着型イメージセンサー95のガラス面95aとの距離であるギャップを変化させるようになっている。
本複写機では、ガラス面95aとローラ部96aとのギャップを、第1ギャップ値g1、第2ギャップ値g2、第3ギャップ値g3、第4ギャップ値g4の4段階で変化させるようになっている(g1<g2<g3<g4)。図17は、ガラス面95aとローラ部96aとのギャップを最小の第1ギャップ値g1に調整したときにおける支持ユニット及びその周囲構成を複写機本体の正面側から示す図である。また、図18は、同ギャップを第1ギャップ値g1に調整したときにおける支持ユニット及びその周囲構成を複写機本体の側面側から示す図である。同ギャップを第1ギャップ値g1にする場合、図示のように、第2偏心カム104が、その最大半径箇所を第2コイルバネ103に突き当てる位置(上)で回転を停止させて、第2保持部材100cを密着型イメージセンサー95のガラス面95aに突き当てる。また、第1偏心カム102が、その最大半径箇所を第1コイルバネ101に突き当てる位置(上)で回転を停止させて、第1保持部材100aを第2保持部材100cの開口内壁上端に突き当てる。また、アーム105が、第2読取ローラ96の回転軸部材96bを第1保持部材100aの長穴100bの上端に突き当てる位置で回動を停止させる。これらの結果、上記ギャップが4段階のうちの最小値である第1ギャップ値g1に調整される。
図19は、上記ギャップを2番目に小さい値である第2ギャップ値g2に調整したときにおける支持ユニット及びその周囲構成を複写機本体の正面側から示す図である。また、図20は、上記ギャップを第2ギャップ値g2に調整したときにおける支持ユニット及びその周囲構成を複写機本体の側面側から示す図である。上記ギャップを第2ギャップ値g2にする場合、図示のように、第2偏心カム104や第2偏心カム102は、それぞれ第1ギャプ値g1のときと同様に、「上」の位置で回転を停止させる。これに対し、アーム105は、第2読取ローラ96の回転軸部材96bを第1保持部材100aの長穴100bの下に突き当てる位置で回動を停止させる。これにより、上記ギャップが、第1ギャップ値g1よりも少し大きな第2ギャップ値g2に拡大される。
図21は、上記ギャップを3番目に小さい値である第3ギャップ値g3に調整したときにおける支持ユニット及びその周囲構成を複写機本体の正面側から示す図である。また、図22は、上記ギャップを第3ギャップ値g3に調整したときにおける支持ユニット及びその周囲構成を複写機本体の側面側から示す図である。上記ギャップを第3ギャップ値g3にする場合、図示のように、第2偏心カム104は、第1ギャップ値g1や第2ギャップ値g2のときと同様に、「上」の位置で回転を停止させて、第2保持部材100cを密着型イメージセンサー95のガラス面95aに突き当てる。これに対し、第1偏心カム102は、その最小半径箇所を第1コイルバネ101に突き当てる位置(下)で回転を停止させることで、第1保持部材100aを第2保持部材100cの開口内壁の下端に突き当たる。また、アーム105は、自らの切り欠き部を第2読取ローラ96の回転軸部材96bに接触させない位置で回動を停止させる。これにより、回転軸部材96bは自重で長穴100bの下端に突き当たる。これらの結果、上記ギャップが第2ギャップ値g2よりも少し大きな第3ギャップ値g3に調整される。
図23は、上記ギャップを最大の第4ギャップ値g4に調整したときにおける支持ユニット及びその周囲構成を複写機本体の正面側から示す図である。また、図24は、上記ギャップを第4ギャップ値g4に調整したときにおける支持ユニット及びその周囲構成を複写機本体の側面側から示す図である。上記ギャップを第4ギャップ値g4にする場合、図示のように、第2偏心カム104や第1偏心カム102は、それぞれ自らの最小半径箇所をコイルバネに突き当てる「下」の位置で回転を停止させる。これにより、第1保持部材100aが第3ギャップ値g3のときと同様に第2保持部材100cの開口内壁の下端に突き当たる。一方、第2保持部材100cは、第3ギャップ値g3のときとは異なり、密着型イメージセンサー95のガラス面95aから離間する。また、アーム105は、自らの切り欠き部を第2読取ローラ96の回転軸部材96bに接触させない位置で回動を停止させる。これにより、第2読取ローラ96の回転軸部材96は自重で長穴100bの下に突き当たる。これらの結果、上記ギャップが最大の第4ギャップ値g4まで拡大される。
コントローラ64は、原稿MSの厚みの検知結果が所定の上限値よりも小さく、且つ、両面読取モードである場合(非厚紙読取時)には、上記ギャップを第2ギャップ値g2に調整した状態で、原稿MSを上記ギャップ内に通して原稿MSの第2面読み取りを行わせる。実施形態では、この第2ギャップ値g2は、予め使用を想定している原稿厚み範囲のうち、最小の厚みに対応する最小厚対応距離値になっている。
また、コントローラ64は、原稿MSの厚みの検知結果が所定の上限値以上であり、且つ、両面読取モードである場合(厚紙読取時)には、上記ギャップを第3ギャップ値g3に調整した状態で、原稿MSを上記ギャップ内に通して原稿MSの第2面読み取りを行う。原稿の厚みに応じて上記ギャップを第2ギャップ値g2にしたり、第3ギャップ値g3にしたりすることで、原稿MSの厚みにかかわらず、原稿MSの第2面を密着型イメージセンサーに密着させて、密着不良による読み取り精度の悪化を回避することができる。
また、コントローラ64は、片面読取モードである場合には、上記ギャップを最大の第4ギャップ値g4に調整した状態で、原稿MSを上記ギャップ内に通す。これにより、密着型イメージセンサー95による読み取りを行わない片面読取モードでは、原稿MSをガラス面95aに摺擦させずに上記ギャップ内で搬送することで、ガラス面95aと原稿MSとの摺擦による密着型イメージセンサー95の劣化を抑えることができる。
また、コントローラ64は、両面読取モードにおいて、原稿MSを上記ギャップに進入させる前のタイミングで、第2読取ローラ96のローラ部96aを密着型イメージセンサー95に読み取らせて白色読取データを取得する場合には、上記ギャップを最小の第1ギャップ値g1にした状態でその読み取りを行わせる。かかる構成では、焦点深度が最小厚対応距離値よりも小さい密着型イメージセンサー95であっても、上記ギャップを読み取り時よりも小さくして、ローラ部96aをその焦点の位置まで近づけることで、ローラ部96aの白色を精度良く読み取らせることができる。参考までに、原稿MSの第2面の読み取り態様と、各偏心カムの回転位置と、ギャップ値との関係を次の表1に示す。
なお、白色読取データを取得した後、原稿MSの第2面の読み取りを行う場合には、原稿MSを上記ギャップに進入させる前に、上記ギャップを第2ギャップ値g2又は第3ギャップ値g3に調整する。
第1偏心カム102や第2偏心カム104は、それぞれ、第2読取ローラ96の一端側を移動させるためのものと、他端側を移動させるためのものとの2つが設けられている。それら2つは、図25に示すように、同一の回転軸部材に固定されており、互いに一体となって回転するようになっている。ベルトを介してモータによって1つの回転軸部材を回転させることで、一端側、他端側の偏心カムを一体で回転させることができる。
以上、本複写機においては、密着型イメージセンサー95に対し、基準色読取データたる白色読取データの取得のために原稿支持部材たる第2読取ローラ96の色調を読み取らせるときには、センサー〜ローラ間の距離である上記ギャップを調整可能範囲内の最小の第1ギャップ値g1にする処理を実施するように、支持ユニット100、各種偏心カム、コイルバネ等からなる距離調整機構を構成している。かかる構成では、第2読取ローラ96を可能な限り最大に近づけた状態で、白色読取データを取得することができる。なお、前記距離の最小値として、ゼロよりも大きなギャップ値の代わりに、ゼロ(ローラ部96aをガラス面95aに当接)を採用してもよい。
また、本複写機においては、原稿MSの厚み情報を取得する厚み情報取得手段を設けるとともに、密着型イメージセンサー95に対して原稿MSの画像を読み取らせるときにおけるギャップ値を、厚み情報取得手段による検知結果に基づいて変化させる処理を実施するように、コントローラ64を構成している。かかる構成では、既に説明したように、原稿MSの厚みにかかわらず、原稿MSの第2面を密着型イメージセンサー95に密着させて、密着不良による読み取り精度の悪化を回避することができる。
また、本複写機においては、上記ギャップを、少なくても、白色読取データの取得のための値である第1ギャップ値g1と、原稿の比較的小さな厚みに対応する値である第2ギャップ値g2と、原稿の比較的大きな厚みに対応する値である第3ギャップ値g3との3段階で変化させるように、距離調整機構を構成している。かかる構成では、白色読取データ取得時には、画像読取時よりもギャップを小さくしつつ、画像読取時には原稿MSの厚みに応じたギャップの調整を行うことができる。
また、本複写機においては、駆動源としてのモータの駆動力を利用して第2読取ローラ96を原稿厚み方向に移動させるのに伴って上記ギャップを変化させるように距離調整機構を構成している。かかる構成では、人力によらずにギャップ値の調整を行うことができる。なお、モータの駆動力に代えて、ソレノイドの駆動力により、第1保持部材100a、第2保持部材100c、回転軸部材96bをそれぞれ移動させるようにしてもよい。
また、本複写機においては、原稿支持部材として、ローラ部96a、及びローラ部96aの回転軸線方向の両端からそれぞれ突出して回転自在に支持される回転軸部材96bを具備する原稿支持ローラたる第2読取ローラ96を用い、且つ、それの回転軸線方向における一端側の回転軸部材96bを原稿厚み方向に移動させる駆動力を発揮するモータと、他端側の回転軸部材96bを原稿厚み方向に移動させる駆動力を発揮するモータとを、1つのモータで共用するようにしている。かかる構成では、それぞれの駆動力を別々のモータで付与する場合に比べて、低コスト化を図ることができる。
また、本複写機においては、密着型イメージセンサー95に対して原稿MSの画像を読み取らせることなく原稿MSを原稿読取位置である上記ギャップに通すときには、原稿MSの画像を読み取らせるときに比べて、上記ギャップを大きくする処理を実施するように、コントローラ64を構成している。かかる構成では、既に説明したように、原稿MSの第2面の読み取りを行わないにもかかわらず、第2面を密着型イメージセンサー95のガラス面95aに摺擦させてしまうことによるセンサー劣化の発生を回避することができる。