JP5365173B2 - 物理量測定装置および電子機器 - Google Patents
物理量測定装置および電子機器 Download PDFInfo
- Publication number
- JP5365173B2 JP5365173B2 JP2008307619A JP2008307619A JP5365173B2 JP 5365173 B2 JP5365173 B2 JP 5365173B2 JP 2008307619 A JP2008307619 A JP 2008307619A JP 2008307619 A JP2008307619 A JP 2008307619A JP 5365173 B2 JP5365173 B2 JP 5365173B2
- Authority
- JP
- Japan
- Prior art keywords
- circuit
- drive
- physical quantity
- amplitude
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
Description
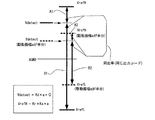
まず、振動型ジャイロスコープの動作原理を説明する。振動型ジャイロスコープは、水晶あるいはセラミックなどで作成した圧電振動子や、シリコンなどで作成した静電駆動の振動子など(物理量トランスデューサ)を利用した角速度測定装置である。振動運動(駆動振動)をしている振動子に角速度を加えると、振動の方向と直交する向きにコリオリ力が働き、結果としてコリオリ力の方向に振動(検出振動)を始める。このコリオリ力による振動は、駆動振動と同じ周波数であり、振幅は入力された角速度に比例する。コリオリ力による振動(検出振動)の強さを測定することで、振動子にかかっている角速度を測定することができる。
図1は、振動型ジャイロスコープの基本的な構成の一例を示す図である。図1の振動型ジャイロスコープ(以下、ジャイロスコープあるいは単にセンサという場合がある)では、ジャイロスコープ(センサ)の検出回路300の出力段にA/D変換器316を設けて、デジタル出力とする。さらに、A/D変換器316の基準電圧(リファレンス:VrefHおよびVrefL)の電圧レベルを、発振駆動回路200側のAGC回路206に含まれる駆動振幅検出回路208の出力信号(Vamptd)に基づいて、可変に(適応的に)制御する。これにより、振動子の駆動振動に対するレシオメトリック(つまり、駆動振幅の変動によって検出感度が変化しない新規なレシオメトリック構成)が実現され、駆動振幅によらず、常に、一定の感度が保たれる。
図1に示されるように、発振駆動回路200は、I/V変換回路202と、位相調整回路204と、AGC回路206とを有する。発振駆動回路200は、物理量トランスデューサである振動子100と発振ループを形成し、振動子100に駆動振動を励振する。AGC回路206は、駆動振幅検出回路208(整流回路210と、平滑回路212とを含む)と、基準電圧回路214と、差動増幅器216と、ゲインコントロールアンプ(GCA)218と、を有する。平滑回路212は、抵抗RSおよびコンデンサC10を含む。平滑回路212は、発振ループの駆動信号(すなわち振動子の駆動振動)の振幅に対応した電圧レベルの信号(つまり、駆動振幅検出回路208の検出出力信号)Vamptdを出力する。差動増幅器216は、Vamptdと基準電圧Vref(agc)の差を増幅し、その増幅された信号がゲインコントロールアンプ(GCA)218のゲイン制御信号となる。GCA218は、発振定常状態において、発振振幅が基準電圧Vref(agc)で規定される振幅になるように発振振幅を制御する。
発振駆動回路(以下、単に駆動回路と記載する場合がある)200は、振動子(振動型ジャイロスコープ素子)100を共振子とする発振回路である。振動子100から出力された電流信号は、I/V変換回路(電流/電圧変換回路)202で電圧に変換される。位相調整回路204は、発振回路が発振状態を維持するよう位相を調整する回路であり、省いても安定な発振状態を維持できる場合は省いても良い。I/V変換回路202から出力され、位相調整回路204で位相調整された信号は、ゲインコントロールアンプ(GCA)218で増幅された後、振動子100にフィードバックされ、発振ループを構成する。発振ループには、発振振幅を一定にする自動利得制御(AGC)回路206が設けられている。AGC回路206は、先に述べたGCAの他に、駆動振幅を検出する駆動振幅検出回路208と、振幅の基準を与える基準電圧回路214と、駆動振幅検出回路208から出力された振幅信号(Vamptd)と基準電圧(Vref(agc))との差を増幅する差動増幅器216とで構成されている。AGC回路206では、検出された駆動振幅が基準電圧より大きければGCA218のゲインを下げて駆動振幅を下げる働きをし、逆に、駆動振幅が基準より小さければGCA218のゲインを上げて駆動振幅を上げる働きをする。これにより、一定の駆動振幅を保つように動作する。
一方、検出回路300は、コリオリ力による撓み変位によって振動子100から出力される電荷を受けて電圧に変換する電荷電圧変換回路(チャージアンプ)302、差動増幅回路304、振幅変調された信号を復調する同期検波回路308、ローパスフィルタ(LPF)310、A/D変換器(ADC)316より成っている。
図9は、本発明の振動型ジャイロスコープの構成の他の例を示す図である。図9の基本的な構成は、図1と同じであるが、AGC回路206における整流動作ならびに積分動作を行う部分の回路構成が異なる。また、検出回路300において、オフセット調整回路320が設けられる点でも図1と異なっている。
図10は、本発明の振動型ジャイロスコープの構成のさらに他の例を示す図である。第1の実施形態では、駆動振幅aをAGCで一定に保つ構成を採用している。しかし、本発明を用いると、駆動振幅aによらず、角速度に対する感度を一定にできるため、AGC回路は必須ではなくなる。
本実施形態では、本発明のジャイロセンサ(ジャイロスコープ)を、例えば、デジタル一眼レフカメラの手ぶれ防止用に使用する。
本実施形態では、本発明のジャイロセンサ(ジャイロスコープ)を、例えば、家庭用ゲームコントローラ(携帯型ゲームコントローラ)に搭載する。
(1)例えば、振動型ジャイロスコープにおいて、駆動振動の振幅を一定に保たなくても角速度に対する感度を一定に保つことができる。
(2)駆動振動の振幅を一定に保つ回路(自動利得制御回路AGC)を持つ場合でも、発振起動時などは駆動振動の振幅は一定でないが、本発明を適用すれば、駆動振動の振幅が一定でなくても、検出感度に対する影響は最小化され、よって、例えば、より安定した感度を持つジャイロスコープを構成できる。
(3)検出感度を一定化する手段として、駆動振動の振幅に応じてA/D変換器の基準電圧(リファレンス)を変化させるという手法を採用しているため、アナログ乗算器やゲインコントロールアンプを使う場合と比較して、温度特性・線形性などの点で優れており、正確な制御を、より簡易に実現することが可能である。
(4)外乱に関係なく物理量の検出感度を一定に保つことができるため、発振起動期間(電源投入時点から発振定常状態に至るまでの期間)においても、有効な、物理量の検出信号を得ることができ、よって、起動の待ち時間を短縮できる。
(5)電源電圧の変動等の電気的な外乱要因に対する対策ならびに機械的な外乱要因(電子機器に加わる衝撃や揺れ等)に対する対策も実現される。よって、電子機器の性能が向上する。
212 平滑回路、214 基準電圧回路(バンドギャップ回路)、
216 差動増幅器、218 ゲインコントロールアンプ(GCA)、
300 検出回路、302 チャージアンプ(Q/V変換回路)、
304 差動増幅回路、306 2値化回路 308 同期検波回路、
310 ローパスフィルタ(LPF)、
312 ゲイン調整用増幅器(基準電圧生成のために電圧振幅を調整するための回路)、314 反転増幅器
Claims (11)
- 物理量トランスデューサと発振ループを形成し、前記物理量トランスデューサに駆動振動を励振する発振駆動回路と、
前記物理量トランスデューサから出力されるアナログの検出信号を検波回路によって検波した後、検波された信号を、A/D変換器によってデジタル信号に変換して出力する検出回路と、を含み、
前記発振駆動回路は、前記駆動振動の振幅を検出する駆動振幅検出回路を有し、
前記検出回路に含まれる前記A/D変換器の基準電圧の電圧レベルは、前記駆動振幅検出回路の検出出力信号に基づいて、前記A/D変換器の変換幅が、前記駆動振動の振幅に比例するように制御されることを特徴とする物理量測定装置。 - 請求項1記載の物理量測定装置であって、
前記発振駆動回路は、前記駆動振動の振幅を一定にするためのAGC回路を有し、前記駆動振幅検出回路は、前記AGC回路を構成する回路の一つであることを特徴とする物理量測定装置。 - 請求項1又は請求項2記載の物理量測定装置であって、
前記駆動振幅検出回路の検出出力信号および前記検出出力信号の電圧レベルを反転した信号の少なくとも一方が、前記A/D変換器の前記基準電圧として使用されることを特徴とする物理量測定装置。 - 請求項1又は請求項2記載の物理量測定装置であって、
前記駆動振幅検出回路の検出出力信号の電圧レベルを調整することによって得られる信号を第1の信号とし、前記第1の信号の電圧レベルを反転した信号を第2の信号とした場合、前記第1の信号および前記第2の信号の少なくとも一方が、前記A/D変換器の前記基準電圧として使用されることを特徴とする物理量測定装置。 - 請求項3または請求項4記載の物理量測定装置であって、
前記検出回路は、前記駆動振幅検出回路の検出出力信号に重畳されるオフセット電圧を補償するためのオフセット調整回路を有することを特徴とする物理量測定装置。 - 請求項1〜請求項5のいずれかに記載の物理量測定装置であって、
前記駆動振幅検出回路は、
前記発振ループの発振信号を整流する整流回路と、
前記整流回路の出力信号を平滑する平滑回路と、
を有することを特徴とする物理量測定装置。 - 請求項1〜請求項5のいずれかに記載の物理量測定装置であって、
前記駆動振幅検出回路は、
前記発振ループの発振信号を整流する整流回路と、整流した信号を積分する積分回路とが一体化された整流・積分回路により構成されることを特徴とする物理量測定装置。 - 請求項1記載の物理量測定装置であって、
前記発振駆動回路は、前記駆動振動の振幅の上限および下限の少なくとも一方を規制するための振幅制限回路を有することを特徴とする物理量測定装置。 - 請求項1〜請求項8のいずれかに記載の物理量測定装置であって、
前記物理量測定装置はジャイロセンサであり、
前記物理量トランスデューサは、前記発振駆動回路によって駆動振動が励振されると共に、角速度に応じた振幅の検出信号を生成する振動型ジャイロスコープ素子であることを特徴とする物理量測定装置。 - 請求項1〜請求項9のいずれかに記載の物理量測定装置と、
可動機構と、
を含むことを特徴とする電子機器。 - 請求項10に記載の電子機器であって、
前記物理量測定装置の動作期間と前記可動機構の動作期間が重なりを有することを特徴とする電子機器。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008307619A JP5365173B2 (ja) | 2008-02-29 | 2008-12-02 | 物理量測定装置および電子機器 |
| CN2009101185396A CN101520327B (zh) | 2008-02-29 | 2009-02-26 | 物理量测定装置以及电子设备 |
| US12/395,359 US8186218B2 (en) | 2008-02-29 | 2009-02-27 | Physical quantity measuring apparatus and electronic device |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008049286 | 2008-02-29 | ||
| JP2008049286 | 2008-02-29 | ||
| JP2008307619A JP5365173B2 (ja) | 2008-02-29 | 2008-12-02 | 物理量測定装置および電子機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009229447A JP2009229447A (ja) | 2009-10-08 |
| JP2009229447A5 JP2009229447A5 (ja) | 2012-01-19 |
| JP5365173B2 true JP5365173B2 (ja) | 2013-12-11 |
Family
ID=41012165
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008307619A Expired - Fee Related JP5365173B2 (ja) | 2008-02-29 | 2008-12-02 | 物理量測定装置および電子機器 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8186218B2 (ja) |
| JP (1) | JP5365173B2 (ja) |
| CN (1) | CN101520327B (ja) |
Families Citing this family (67)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009244019A (ja) * | 2008-03-31 | 2009-10-22 | Seiko Npc Corp | 角速度検出装置 |
| JP2010169532A (ja) * | 2009-01-22 | 2010-08-05 | Panasonic Corp | 駆動回路、物理量センサ装置 |
| US8714012B2 (en) * | 2010-02-16 | 2014-05-06 | Stmicroelectronics S.R.L. | Microelectromechanical gyroscope with inversion of actuation forces, and method for actuating a microelectromechanical gyroscope |
| JP5362097B2 (ja) * | 2010-02-17 | 2013-12-11 | 株式会社村田製作所 | 振動型慣性力センサ |
| JP5717376B2 (ja) * | 2010-03-31 | 2015-05-13 | シチズンホールディングス株式会社 | 物理量センサ |
| JP2011226941A (ja) * | 2010-04-21 | 2011-11-10 | Seiko Epson Corp | 振動型力検出センサー、及び振動型力検出装置 |
| US8378756B2 (en) * | 2010-05-18 | 2013-02-19 | Taiwan Semiconductor Manufacturing Company, Ltd. | Drive loop for MEMS oscillator |
| JP5569245B2 (ja) * | 2010-08-17 | 2014-08-13 | セイコーエプソン株式会社 | 集積回路装置及び電子機器 |
| CN103221779B (zh) | 2010-09-18 | 2017-05-31 | 快捷半导体公司 | 微机械整体式六轴惯性传感器 |
| EP2616388A4 (en) | 2010-09-18 | 2014-08-13 | Fairchild Semiconductor | HERMETIC ENCLOSURE FOR MICROELECTROMECHANICAL SYSTEMS |
| US8813564B2 (en) | 2010-09-18 | 2014-08-26 | Fairchild Semiconductor Corporation | MEMS multi-axis gyroscope with central suspension and gimbal structure |
| US9352961B2 (en) | 2010-09-18 | 2016-05-31 | Fairchild Semiconductor Corporation | Flexure bearing to reduce quadrature for resonating micromachined devices |
| EP2616772B1 (en) | 2010-09-18 | 2016-06-22 | Fairchild Semiconductor Corporation | Micromachined monolithic 3-axis gyroscope with single drive |
| CN103221795B (zh) | 2010-09-20 | 2015-03-11 | 快捷半导体公司 | 包括参考电容器的微机电压力传感器 |
| JP5975601B2 (ja) | 2011-02-25 | 2016-08-23 | セイコーエプソン株式会社 | 検出回路、物理量検出装置、角速度検出装置、集積回路装置及び電子機器 |
| JP5638419B2 (ja) * | 2011-02-25 | 2014-12-10 | セイコーエプソン株式会社 | 信号処理回路、物理量検出装置、角速度検出装置、集積回路装置及び電子機器 |
| JP5559733B2 (ja) * | 2011-03-31 | 2014-07-23 | シチズンホールディングス株式会社 | 物理量センサ |
| JP2012227762A (ja) * | 2011-04-20 | 2012-11-15 | Seiko Epson Corp | 発振回路 |
| JP5561237B2 (ja) * | 2011-04-27 | 2014-07-30 | 株式会社デンソー | 振動子駆動回路 |
| US9091539B2 (en) * | 2011-06-10 | 2015-07-28 | Honeywell International Inc. | Gyroscope dynamic motor amplitude compensation for enhanced rate estimation during startup |
| LU91839B1 (en) * | 2011-07-08 | 2013-01-09 | Iee Sarl | Impedance measurement system |
| US9488693B2 (en) | 2012-04-04 | 2016-11-08 | Fairchild Semiconductor Corporation | Self test of MEMS accelerometer with ASICS integrated capacitors |
| EP2648334B1 (en) | 2012-04-05 | 2020-06-10 | Fairchild Semiconductor Corporation | Mems device front-end charge amplifier |
| EP2647952B1 (en) | 2012-04-05 | 2017-11-15 | Fairchild Semiconductor Corporation | Mems device automatic-gain control loop for mechanical amplitude drive |
| EP2647955B8 (en) | 2012-04-05 | 2018-12-19 | Fairchild Semiconductor Corporation | MEMS device quadrature phase shift cancellation |
| US9625272B2 (en) | 2012-04-12 | 2017-04-18 | Fairchild Semiconductor Corporation | MEMS quadrature cancellation and signal demodulation |
| KR101354782B1 (ko) * | 2012-05-25 | 2014-01-22 | 삼성전기주식회사 | 자이로 센서 신호 탐지 장치 및 그 방법 |
| DE102013014881B4 (de) | 2012-09-12 | 2023-05-04 | Fairchild Semiconductor Corporation | Verbesserte Silizium-Durchkontaktierung mit einer Füllung aus mehreren Materialien |
| ITTO20121116A1 (it) * | 2012-12-20 | 2014-06-21 | St Microelectronics Srl | Circuito e metodo di compensazione dinamica dell'offset per un dispositivo sensore mems |
| US9109901B2 (en) * | 2013-03-08 | 2015-08-18 | Freescale Semiconductor Inc. | System and method for monitoring a gyroscope |
| US9459274B2 (en) | 2013-03-13 | 2016-10-04 | Invensense, Inc. | Round-robin sensing device and method of use |
| US9759564B2 (en) | 2013-03-15 | 2017-09-12 | Fairchild Semiconductor Corporation | Temperature and power supply calibration |
| JP6197323B2 (ja) * | 2013-03-22 | 2017-09-20 | セイコーエプソン株式会社 | 検出装置、センサー、ジャイロセンサー、電子機器及び移動体 |
| JP6222423B2 (ja) * | 2013-03-28 | 2017-11-01 | セイコーエプソン株式会社 | 物理量センサー、電子機器及び移動体 |
| JP6222425B2 (ja) | 2013-04-24 | 2017-11-01 | セイコーエプソン株式会社 | 物理量検出回路、物理量検出装置、電子機器及び移動体 |
| JP6197347B2 (ja) | 2013-04-24 | 2017-09-20 | セイコーエプソン株式会社 | 電子機器及び物理量検出装置 |
| JP6222426B2 (ja) | 2013-04-24 | 2017-11-01 | セイコーエプソン株式会社 | 物理量検出回路、物理量検出装置、電子機器及び移動体 |
| US9109894B2 (en) * | 2013-04-26 | 2015-08-18 | Maxim Integrated Products, Inc. | Gyroscope shock and disturbance detection circuit |
| KR20150015932A (ko) * | 2013-08-02 | 2015-02-11 | 삼성전기주식회사 | 자이로 센서의 구동장치 및 그 제어방법 |
| US9332369B2 (en) * | 2013-10-22 | 2016-05-03 | Infineon Technologies Ag | System and method for automatic calibration of a transducer |
| JP6213165B2 (ja) * | 2013-11-07 | 2017-10-18 | セイコーエプソン株式会社 | 検出装置、センサー、電子機器及び移動体 |
| JP6303411B2 (ja) * | 2013-11-07 | 2018-04-04 | セイコーエプソン株式会社 | 検出装置、センサー、電子機器及び移動体 |
| JP6307840B2 (ja) * | 2013-11-07 | 2018-04-11 | セイコーエプソン株式会社 | 検出装置、センサー、電子機器及び移動体 |
| JP6206113B2 (ja) * | 2013-11-20 | 2017-10-04 | 株式会社村田製作所 | 振動子駆動回路 |
| JP6287151B2 (ja) * | 2013-12-11 | 2018-03-07 | セイコーエプソン株式会社 | 検出装置、センサー、電子機器及び移動体 |
| JP6187305B2 (ja) * | 2014-02-18 | 2017-08-30 | 株式会社デンソー | ジャイロセンサ |
| CN104848847B (zh) * | 2014-02-19 | 2017-11-03 | 无锡华润上华科技有限公司 | 一种陀螺仪传感器控制电路和电子装置 |
| CN103791897B (zh) * | 2014-02-20 | 2016-05-11 | 北京华力创通科技股份有限公司 | 促使微机械陀螺快速起振的电路 |
| US10036652B2 (en) * | 2014-02-24 | 2018-07-31 | The Regents Of The University Of California | Utilization of mechanical quadrature in silicon MEMS vibratory gyroscope to increase and expand the long term in-run bias stability |
| US9835647B2 (en) | 2014-03-18 | 2017-12-05 | Fairchild Semiconductor Corporation | Apparatus and method for extending analog front end sense range of a high-Q MEMS sensor |
| TWI576679B (zh) * | 2014-06-11 | 2017-04-01 | 宇能電科技股份有限公司 | 偏移電壓自動補償系統 |
| JP5811239B2 (ja) * | 2014-06-25 | 2015-11-11 | セイコーエプソン株式会社 | 集積回路装置及び電子機器 |
| DE102014010056B4 (de) * | 2014-07-07 | 2016-02-25 | Northrop Grumman Litef Gmbh | Steuervorrichtung und Verfahren zur Minimierung von Skalenfaktorfehlern eines Drehratensensors |
| JP2016171493A (ja) * | 2015-03-13 | 2016-09-23 | セイコーエプソン株式会社 | 回路装置、電子機器及び移動体 |
| US10458839B1 (en) | 2015-11-04 | 2019-10-29 | General Electric Company | Methods and systems for monitoring a dynamic system |
| CN105403220A (zh) * | 2015-12-22 | 2016-03-16 | 无锡信大气象传感网科技有限公司 | 一种基于载体的移动轨迹检测系统 |
| CN105466427A (zh) * | 2015-12-22 | 2016-04-06 | 无锡信大气象传感网科技有限公司 | 一种基于放大滤波电路的载体移动轨迹检测系统 |
| CN105651282A (zh) * | 2015-12-22 | 2016-06-08 | 无锡信大气象传感网科技有限公司 | 一种基于射频识别的载体移动轨迹检测系统 |
| JP6705283B2 (ja) * | 2016-05-20 | 2020-06-03 | 株式会社デンソー | ジャイロセンサ装置 |
| JP6571064B2 (ja) * | 2016-11-21 | 2019-09-04 | 株式会社東芝 | 検出装置およびセンサ装置 |
| CN107036589B (zh) * | 2017-04-20 | 2018-02-23 | 中国人民解放军国防科学技术大学 | 一种用于mems陀螺仪的角度测量系统及其方法 |
| IT201700103058A1 (it) * | 2017-09-14 | 2019-03-14 | St Microelectronics Srl | Circuito e metodo di azionamento per un giroscopio mems e relativo giroscopio mems |
| CN108332733B (zh) * | 2018-01-26 | 2020-05-19 | 珠海全志科技股份有限公司 | 微机械单振子三轴陀螺仪的驱动和检测装置 |
| CN108332732B (zh) * | 2018-01-26 | 2020-05-19 | 珠海全志科技股份有限公司 | 微机械单振子三轴陀螺仪的驱动和检测装置 |
| JP2021071382A (ja) * | 2019-10-31 | 2021-05-06 | セイコーエプソン株式会社 | 物理量センサー、電子機器及び移動体 |
| CN110946572B (zh) * | 2019-12-18 | 2022-04-15 | 郑州轻工业大学 | 无线心电图(ecg)采集监测装置 |
| CN112146638B (zh) * | 2020-09-11 | 2022-10-28 | 中国船舶重工集团公司第七0七研究所 | 一种谐振陀螺仪稳幅激励有效值检测电路及其方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61258110A (ja) * | 1985-05-13 | 1986-11-15 | Hitachi Ltd | 角速度センサ |
| JPH06194178A (ja) * | 1992-10-12 | 1994-07-15 | Nippon Soken Inc | 角速度センサ |
| JPH0736613A (ja) * | 1993-07-07 | 1995-02-07 | Tokin Corp | データ入力装置 |
| JPH0875473A (ja) * | 1994-09-08 | 1996-03-22 | Nissan Motor Co Ltd | 振動ジャイロ装置 |
| JPH1144540A (ja) * | 1997-07-25 | 1999-02-16 | Denso Corp | 振動型角速度センサ |
| US6508122B1 (en) * | 1999-09-16 | 2003-01-21 | American Gnc Corporation | Microelectromechanical system for measuring angular rate |
| JP3520821B2 (ja) * | 1999-10-29 | 2004-04-19 | 株式会社村田製作所 | 振動ジャイロ用自己診断回路 |
| WO2001069266A1 (en) * | 2000-03-13 | 2001-09-20 | Microsensors, Inc. | Method of driving mems sensor with balanced four-phase comb drive |
| JP4668407B2 (ja) | 2000-12-08 | 2011-04-13 | 京セラキンセキ株式会社 | 角速度センサ |
| US6564636B2 (en) * | 2001-08-22 | 2003-05-20 | Honeywell International Inc. | Wide band digital phase locked loop (PLL) with a half-frequency output |
| JP2004053396A (ja) * | 2002-07-19 | 2004-02-19 | Matsushita Electric Ind Co Ltd | 角速度センサおよびそれを用いた自動車 |
| JP2005241625A (ja) * | 2004-01-27 | 2005-09-08 | Seiko Epson Corp | クロック生成装置、振動式ジャイロセンサ、ナビゲーション装置、撮像装置および電子機器 |
| JP4411529B2 (ja) * | 2004-08-05 | 2010-02-10 | 株式会社デンソー | 振動型角速度センサ |
| JP4258466B2 (ja) * | 2004-12-16 | 2009-04-30 | セイコーエプソン株式会社 | 圧電ジャイロ素子及び圧電ジャイロスコープ |
| JP2008089577A (ja) * | 2006-09-08 | 2008-04-17 | Seiko Epson Corp | 駆動装置、物理量測定装置及び電子機器 |
| JP4449972B2 (ja) * | 2006-11-10 | 2010-04-14 | セイコーエプソン株式会社 | 検出装置、センサ及び電子機器 |
| JP4211840B2 (ja) * | 2006-11-10 | 2009-01-21 | セイコーエプソン株式会社 | 検出装置、センサ及び電子機器 |
| US7779688B2 (en) * | 2006-12-20 | 2010-08-24 | Epson Toyocom Corporation | Vibration gyro sensor |
| JP2008209182A (ja) | 2007-02-26 | 2008-09-11 | Seiko Epson Corp | 検出装置、センサ及び電子機器 |
-
2008
- 2008-12-02 JP JP2008307619A patent/JP5365173B2/ja not_active Expired - Fee Related
-
2009
- 2009-02-26 CN CN2009101185396A patent/CN101520327B/zh not_active Expired - Fee Related
- 2009-02-27 US US12/395,359 patent/US8186218B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009229447A (ja) | 2009-10-08 |
| CN101520327A (zh) | 2009-09-02 |
| CN101520327B (zh) | 2012-04-04 |
| US20090217757A1 (en) | 2009-09-03 |
| US8186218B2 (en) | 2012-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5365173B2 (ja) | 物理量測定装置および電子機器 | |
| US7069783B2 (en) | Angular velocity sensor | |
| JP4534741B2 (ja) | ジャイロセンサ | |
| JP5360361B2 (ja) | 角速度検出装置用回路、角速度検出装置及び故障判定システム | |
| JP4310571B2 (ja) | 静電容量検出型振動ジャイロ、および静電容量変化検出方法 | |
| JP6641712B2 (ja) | 回路装置、電子機器及び移動体 | |
| US7849746B2 (en) | Driver device, physical quantity measuring device, and electronic instrument | |
| US8325243B2 (en) | Image stabilization control circuit for correcting vibration-caused displacement of optical axis, and image pickup apparatus provided with the same | |
| JP2009200888A (ja) | Mems発振器 | |
| JP2008286597A (ja) | 検出装置、検出方法及び電子機器 | |
| JP4779692B2 (ja) | 発振回路及び物理量トランスデューサ | |
| JP4867385B2 (ja) | 発振回路及び物理量トランスデューサ | |
| US8026949B2 (en) | Image stabilization control circuit for correcting vibration-caused displacement of optical axis, and image pickup apparatus provided with the same | |
| US7692506B2 (en) | Oscillation driver device, physical quantity measuring device, and electronic instrument | |
| JP2001116553A (ja) | マイクロジャイロスコープの加振駆動電圧自動利得制御回路 | |
| JP2009168588A (ja) | 検出回路、物理量測定装置、ジャイロセンサおよび電子機器 | |
| JP2001099658A (ja) | マイクロジャイロスコープの角速度出力補償回路 | |
| JP5040117B2 (ja) | 発振回路、物理量トランスデューサ及び振動ジャイロセンサ | |
| JP2005127978A (ja) | 発振回路および角速度センサ | |
| JP2004212111A (ja) | 角速度センサ | |
| JP2006105659A (ja) | 圧電振動ジャイロ及びその感度調整方法 | |
| JP2009244019A (ja) | 角速度検出装置 | |
| JP2006153715A (ja) | 振動ジャイロ | |
| JP5622001B2 (ja) | 角速度検出装置用回路、角度検出装置及び故障判定システム | |
| JP2010237137A (ja) | 角速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130813 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130826 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |