JP5278552B2 - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP5278552B2 JP5278552B2 JP2011535255A JP2011535255A JP5278552B2 JP 5278552 B2 JP5278552 B2 JP 5278552B2 JP 2011535255 A JP2011535255 A JP 2011535255A JP 2011535255 A JP2011535255 A JP 2011535255A JP 5278552 B2 JP5278552 B2 JP 5278552B2
- Authority
- JP
- Japan
- Prior art keywords
- engine
- assist
- brake
- emergency operation
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/321—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration deceleration
- B60T8/3255—Systems in which the braking action is dependent on brake pedal data
- B60T8/3275—Systems with a braking assistant function, i.e. automatic full braking initiation in dependence of brake pedal velocity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/662—Electrical control in fluid-pressure brake systems characterised by specified functions of the control system components
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/68—Electrical control in fluid-pressure brake systems by electrically-controlled valves
- B60T13/686—Electrical control in fluid-pressure brake systems by electrically-controlled valves in hydraulic systems or parts thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/72—Electrical control in fluid-pressure brake systems in vacuum systems or vacuum booster units
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/02—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving vehicles; peculiar to engines driving variable pitch propellers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/03—Brake assistants
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Regulating Braking Force (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Braking Systems And Boosters (AREA)
Description
特許文献2には、ブレーキ操作部材の緊急操作が行われて開始条件が成立した場合に、ブレーキシリンダの液圧を大きくする緊急操作時アシスト制御が行われるブレーキ制御装置が記載されている。このブレーキ制御装置においては、マスタシリンダの液圧の増加勾配が設定勾配dPth以上となり、かつ、設定時間内にマスタシリンダの液圧が設定圧Pth以上になった場合に、開始条件が成立したとされる。
本項に記載の車両制御装置においては、エンジンの自動停止状態とエンジンの作動状態とで、異なる態様でブレーキのアシスト制御が行われる。『アシスト制御の態様が異なる』とは、開始条件の内容が異なる場合、アシスト量やアシスト量の決定規則が異なる場合等が該当する。
(i)例えば、ブレーキ操作部材の操作力がバキュームブースタ(以下、単にブースタと略称する)によって倍力されて出力され、その出力に応じた液圧がマスタシリンダの加圧室に発生させられる場合において、マスタシリンダの液圧の増加勾配dPmがしきい値dPmthを超えた場合に、開始条件が成立したとして、アシスト制御が開始される場合がある。
一方、エンジンの作動状態においては、ブースタの負圧室に負圧が供給され得るため、負圧室の圧力(以下、ブースタ負圧と略称する)は真空に近い状態にあると推定されるが、エンジンの自動停止状態においては、原則として負圧が供給されないため、ブースタ負圧が大気圧に近い状態にあると推定される。
図7に、操作速度(操作力の増加速度)が大きい場合(例えば、緊急操作が行われた場合)と小さい場合とのそれぞれにおいて、ブースタ負圧が真空に近い場合と大気圧に近い場合とのそれぞれにおけるマスタシリンダ液圧の変化を示す。細実線、細破線は、それぞれ、操作速度が小さい場合における、ブースタ負圧が真空に近い場合のマスタシリンダ液圧の変化、大気圧に近い場合のマスタシリンダ液圧の変化を示し、太実線、太破線は、それぞれ、操作速度が大きい場合における、ブースタ負圧が真空に近い場合の変化、大気圧に近い場合の変化を示す。
図7から、操作速度が小さい場合には、ブースタ負圧が大気圧に近くても真空に近くても、マスタシリンダ液圧の操作力の増加に対する増加遅れは小さいが、操作速度が大きい場合には、マスタシリンダ液圧の操作力の増加に対する増加遅れが大きくなり、ブースタ負圧が大気圧に近い場合は、さらに、ブースタの助勢遅れ等により、遅れが大きくなることがわかる。
そのため、同様な緊急操作(操作力の増加速度が大きく、かつ、増加速度が同じ操作)が行われた場合であっても、エンジンの作動状態においては開始条件が成立してアシスト制御が行われるが、エンジンの自動停止状態においては開始条件が成立せず、アシスト制御が行われない場合がある。
そこで、例えば、エンジンの自動停止状態においてはエンジンの作動状態における場合より、マスタシリンダの液圧の増加勾配についてのしきい値を小さい値(dPmth−Δ)とすることができる。それによって、エンジンの自動停止状態であっても、アシスト制御が適切に行われるようにすることができる。
(ii)また、図7の太、細実線と太、細破線とが示すように、ブースタ負圧が大気圧に近い場合は真空に近い場合より、出力可能な最大助勢力(ブースタが助勢限界に達した場合の助勢力)が小さくなる。そのため、エンジンの自動停止状態においてはブースタの助勢限界後のマスタシリンダの液圧が小さくなり、制動力が不足する場合がある。そこで、例えば、エンジンの自動停止状態においては、エンジンの作動状態における場合よりアシスト量を大きくすることができる。それによって、エンジンの自動停止状態においても、制動力不足を抑制することができ、アシスト制御が適切に行われるようにすることができる。
なお、ブースタが助勢限界に達する前においても、図7に示すように、ブースタの助勢遅れに起因して、エンジンの自動停止状態においてはエンジンの作動状態における場合よりマスタシリンダ液圧が相対的に小さくなる。そこで、アシスト量を大きくすれば、効き遅れを抑制することができる。
(iii)さらに、エンジンの自動停止状態においては、発電機も停止状態にあるため、バッテリ等の蓄電装置に貯えられる電力(蓄電量)が不足する場合がある。一方、アシスト制御においては電力が消費されるのが普通である。そのため、エンジンの自動停止状態においては、アシスト制御における消費電力が少なくされることが望ましい。そこで、例えば、エンジンの自動停止状態においてはエンジンの作動状態における場合より、早めにアシスト制御が開始されるようにすることができる。それによって、アシスト制御の要求が速やかに解消されれば、過大な電力が消費されることを回避することができ、アシスト制御が適切に行われるようにすることができる。
以上のように、エンジンの自動停止状態とエンジンの作動状態とで、異なる態様でアシスト制御が行われるようにすれば、エンジンが自動停止状態にあっても適切にアシスト制御が行われるようにすることができる。
前記車両の車輪の回転を抑制するブレーキの出力を、開始条件が成立した場合に、前記ブレーキ操作部材の操作状態に対応する大きさよりアシスト量大きくするアシスト制御を行うブレーキ制御装置と
を含む車両制御装置であって、
前記ブレーキ制御装置が、前記エンジンが前記エンジン制御装置によって自動で停止させられている自動停止状態において、前記エンジンの作動状態におけるアシスト制御とは異なる態様で前記アシスト制御を実行する自動停止中アシスト制御部を含むことを特徴とする車両制御装置。
アシスト制御は、ブレーキの出力を、ブレーキ操作部材の操作状態に対応する大きさよりアシスト量だけ大きくする制御である。
『ブレーキ操作部材の操作状態に対応する大きさ』とは、ブレーキがマスタシリンダの液圧により作動させられる液圧ブレーキである場合における、マスタシリンダの液圧の大きさに対応する。また、ブレーキの出力が、通常(アシスト制御、スリップ制御等が行われていない場合をいう)、ブレーキ操作部材の操作状態量で決まる要求値に近づくように制御される場合における、その要求値に対応する。操作状態量には、操作力、ストローク、マスタシリンダ液圧等の1つ以上が含まれる。
アシスト量は、固定値でも可変値でもよく、可変値とした場合には、緊急度に応じた大きさとすることができる。例えば、ブレーキ操作速度が大きい場合に小さい場合より大きくなる値としたり、前方車両に急速に接近する可能性が高い場合に低い場合より大きくなる値としたりすること等ができる。
(2)前記自動停止中アシスト制御部が、前記エンジンの自動停止状態における前記開始条件を、前記エンジンの作動状態に比較して成立し易い条件に決定する開始条件決定部を含む(1)項に記載の車両制御装置。
『成立し易い条件』とは、開始条件において、成立するか否かの判断に使用される物理量(その物理量と1対1に対応する物理量も含む)についてのしきい値が小さくされた条件である。例えば、エンジンの作動状態における開始条件がマスタシリンダ液圧の増加勾配がしきい値を超えた場合に成立する条件である場合において、エンジンの自動停止状態における開始条件を、そのしきい値が小さい値とされた条件が該当する。このしきい値が小さくされた条件は、マスタシリンダ液圧の増加勾配を基準に考えると、成立し易い条件となる。
しかし、この条件は、運転者の操作状態(操作力の増加速度)を基準に考えると、エンジンの作動状態における場合より成立し易い条件とは必ずしも言えない。上述のように、エンジンの自動停止状態において緊急操作が行われた場合において、ブースタ負圧が大気圧に近くなっている場合には、マスタシリンダの増圧遅れが大きくなるため、しきい値が小さくされても、エンジンの作動状態における場合と同様の緊急操作が行われた場合に、マスタシリンダ液圧の増加勾配がしきい値を超えなかったり、遅れて超えることがあるからである。
それに対して、運転者の操作ストロークを基準に考えると、成立し易い条件といえる。操作ストロークの増加勾配とマスタシリンダ液圧の増加勾配とは1対1に対応すると考えることができるからである。
このように、本項に記載の車両制御装置においては、エンジンの自動停止状態における開始条件が、エンジンの作動状態における場合より、その開始条件の内容において、その物理量等に関して成立し易くなる条件とされるのである。
(3)前記車両が、(a)前記ブレーキ操作部材の操作力を、負圧室と変圧室との差圧により倍力して出力するバキュームブースタと、(b)そのバキュームブースタの出力により加圧ピストンが前進させられることにより、その前方の加圧室に液圧を発生させるマスタシリンダと、(c)前記エンジンの作動により前記バキュームブースタの負圧室に負圧を供給する負圧供給機構とを含む(1)項または(2)項に記載の車両制御装置。
図10の実線、破線は、緊急操作が行われた場合において、ブースタ負圧が大気圧に近い場合と真空に近い場合とのそれぞれにおけるブレーキ操作部材の操作力の増加に対するマスタシリンダ液圧の変化を示す。図10から、操作力とマスタシリンダ液圧との関係、操作力の増加勾配とマスタシリンダ液圧の増加勾配との関係は、ブースタ負圧が大気圧に近い場合と真空に近い場合とで異なることがわかる。そこで、開始条件が成立するか否かが、マスタシリンダの液圧や液圧の増加勾配に基づいて判断される場合において、開始条件をエンジンの自動停止状態と作動状態とで異なる条件とすることは妥当なことである。
また、同様の理由により、アシスト量の大きさや決定規則をエンジンの自動停止状態と作動状態とで異ならせることも妥当なことである。
(4)前記ブレーキ制御装置が、前記マスタシリンダの液圧と、その液圧と1対1に対応する物理量との少なくとも一方を含む液圧関連量と、その液圧関連量の増加勾配との少なくとも一方が、その少なくとも一方に対応する緊急操作判定しきい値より大きい場合に前記開始条件が成立したとして、前記アシスト制御を開始する緊急操作時アシスト制御部を含む(3)項に記載の車両制御装置。
マスタシリンダの液圧と1対1に対応する物理量には、例えば、ブレーキ操作部材の操作ストロークや、ブレーキがマスタシリンダの液圧により作動させられる液圧ブレーキである場合におけるブレーキシリンダの液圧が対応する。これらマスタシリンダ液圧、ブレーキ操作ストローク、ブレーキシリンダの液圧等が液圧関連量に対応する。
そして、液圧関連量がそれに対応する緊急操作判定しきい値より大きい場合と、液圧関連量の増加勾配がそれに対応する緊急操作判定しきい値より大きい場合との少なくとも一方の場合に、緊急操作が行われたと判定されて、緊急操作時アシスト制御が開始される。
なお、少なくとも液圧関連量の増加勾配がそれに対応する緊急操作判定しきい値より大きい場合に、緊急操作時アシスト制御が開始されるようにすることができる。
(5)前記開始条件決定部が、前記エンジンの自動停止状態における前記少なくとも一方に対応する前記緊急操作判定しきい値を、前記エンジンの作動状態における場合より小さい値に決定する緊急操作判定しきい値決定部を含む(4)項に記載の車両制御装置。
図7から、エンジンの自動停止状態において緊急操作が行われた場合には、ブースタの助勢遅れにより、マスタシリンダ液圧の増加勾配がエンジンの作動状態における場合より相対的に緩やかになると推定される。そのため、エンジンの自動停止状態におけるマスタシリンダ液圧の増加勾配の緊急操作判定しきい値を、エンジンの作動状態における場合より小さい値に決定すれば、適切にアシスト制御が開始されるようにすることができる。
また、エンジンの自動停止状態においては、ブースタの助勢遅れにより、ブースタが助勢限界に達する前の状態において、マスタシリンダの液圧がエンジンの作動状態における場合より相対的に低くなると推定される。そのため、エンジンの自動停止状態におけるマスタシリンダ液圧についての緊急操作判定しきい値をエンジンの作動状態における場合より小さい値に決定すれば、適切にアシスト制御が開始されるようにすることができる。
なお、エンジンの自動停止状態において、常に、緊急操作判定しきい値が作動状態における場合に比較して小さい値に決定されるようにしても、エンジンの自動停止状態において、必要がある場合に、小さい値に決定されるようにしてもよい。
(6)前記緊急操作判定しきい値決定部が、前記少なくとも一方に対応する緊急操作判定しきい値を、予め定められた固定値に決定する固定型しきい値決定部を含む(5)項に記載の車両制御装置。
エンジンの作動状態において、緊急操作判定しきい値は(a)固定値とされる場合と、(b)可変値とされる場合とがある。可変値として、例えば、ブースタ負圧に基づいて決まる値にすることができる。
エンジンの自動停止状態においては、(a)エンジンの作動状態における緊急操作判定しきい値が固定値Xである場合に、その固定値Xより小さい固定値(X−Δ)としたり、(b)エンジン作動状態における緊急操作判定しきい値が可変値AXである場合に、その可変値の下限値AXsより小さい固定値(AXs−Δ)としたりすることができる。
(7)前記緊急操作判定しきい値決定部が、前記少なくとも一方に対応する緊急操作判定しきい値を、前記バキュームブースタの負圧室の圧力が大気圧に近い場合に真空に近い場合に比較して小さい値に決定する可変型しきい値決定部を含む(5)項または(6)項に記載の車両制御装置。
エンジンの自動停止状態においては、(a)エンジンの作動状態において固定値Xである場合に、その固定値X以下の範囲内において、ブースタ負圧が大気圧に近い場合に真空に近い場合より小さい値に決定されるようにしたり、(b)エンジンの作動状態において可変値(ブースタ負圧が大気圧に近い場合に真空に近い場合より小さい値に決定される)である場合に、その可変値AXより設定量だけ小さい値(AX−Δ)としたりすることができる。
ブースタにおける助勢遅れは、ブースタ負圧が大気圧に近い場合は真空に近い場合より大きくなるため、ブースタ負圧が大気圧に近い場合に真空に近い場合に比較して小さい値に決定されるようにすることは妥当なことである。緊急操作判定しきい値は、ブースタ負圧の変化に応じて連続的に変化する値であっても、段階的に変化する値であってもよい。
(8)前記緊急操作判定しきい値決定部が、前記少なくとも一方に対応する緊急操作判定しきい値を、前記バキュームブースタの負圧室の圧力が負圧不足判定しきい値より大気圧に近い場合に、前記エンジンの作動状態における場合より小さい値に決定する限定型しきい値決定部を含む(5)項ないし(7)項のいずれか1つに記載の車両制御装置。
エンジンの自動停止状態にあっても、ブースタ負圧が大気圧に近い状態にあるとは限らない。そして、ブースタ負圧が真空に近い場合には緊急操作判定しきい値を小さくする必要性は低い。
そのため、エンジンの自動停止状態にある場合に、実際のブースタ負圧が取得され、負圧不足判定しきい値より大気圧に近い場合に、小さい値に決定されるようにすることができる。
その結果、緊急操作判定しきい値が、エンジンの自動停止状態において常に小さくされる場合に比較して、真に必要な場合にのみアシスト制御が行われるようにすることができ、その分、消費電力を低減させることができる。
(9)前記緊急操作時アシスト制御部が、前記液圧関連量が、それに対応する緊急操作判定しきい値より大きく、かつ、前記液圧関連量の変化勾配が、それに対応する緊急操作判定しきい値より大きい場合に、前記開始条件が成立したとして、前記アシスト制御を開始する手段を含む(4)項ないし(8)項のいずれか1つに記載の車両制御装置。
液圧関連量が大きく、かつ、液圧関連量の時間に対する増加勾配が大きい場合に、緊急操作が行われたと判定されて、開始条件が成立したとされる。液圧関連量の増加勾配が緊急操作判定しきい値より大きい場合に緊急操作であると判定される場合に比較して、緊急操作であるか否かを正確に判定することができる。
(10)前記緊急操作時アシスト制御部が、前記液圧関連量の変化勾配がそれに対応する緊急操作判定しきい値より大きく、かつ、前記液圧関連量がアシスト要判定しきい値より小さい場合に前記開始条件が成立したとして、前記アシスト制御を開始する制動力不足時アシスト制御部を含む(4)項ないし(9)項のいずれか1つに記載の車両制御装置。
液圧関連量が大きい場合には、ブレーキの出力が大きくなるため、アシスト制御を実行する必要性が低い。そのため、液圧関連量がアシスト要判定しきい値より小さく、アシスト制御の必要性が高い場合に、アシスト制御が開始されるようにしたのである。
(11)前記開始条件決定部が、前記エンジンの自動停止状態における前記アシスト要判定しきい値を、前記エンジンの作動状態における場合と同じ値あるいはより大きい値に決定するアシスト要判定しきい値決定部を含む(10)項に記載の車両制御装置。
ブースタ負圧が大気圧に近い場合は助勢遅れにより、マスタシリンダ液圧が相対的に小さくなるが、アシスト要判定しきい値は、エンジンの自動停止状態においてエンジンの作動状態における場合と同じ値あるいはより大きい値に決定される。
エンジンの自動停止状態において、エンジンの作動状態における場合より、大きな踏力で操作されてもアシスト制御が開始されるようにすることができる。エンジンの自動停止状態においてエンジンの作動状態における場合より、アシスト制御が行われる範囲を広げることができ、安全性を向上させることができる。
(12)前記アシスト要判定しきい値決定部が、前記エンジンの自動停止状態におけるアシスト要判定しきい値を、(a)前記エンジンの作動状態における場合の値より設定量だけ大きい値に決定する手段と、(b)前記エンジンの作動状態における場合の値より大きく、かつ、前記ブースタ負圧が大気圧に近い場合には真空に近い場合より大きくなる値だけ大きくなる値に決定する手段との少なくとも一方を含む(11)項に記載の車両制御装置。
エンジン自動停止状態におけるアシスト要判定しきい値は、エンジン作動状態における値より設定値だけ大きい値とすることができる。設定値は、固定値としたり、ブースタ負圧等で決まる可変値としたりすることができる。また、エンジン作動状態における値より大きく、かつ、ブースタ負圧が大気圧に近い場合には真空に近い場合より大きくなる値とすることもできる。
(13)前記自動停止中アシスト制御部が、前記エンジンの自動停止状態において、前記エンジンの作動状態における場合より前記アシスト量を大きい量に決定するアシスト量決定部を含む(1)項ないし(12)項のいずれか1つに記載の車両制御装置。
エンジンの作動状態において、アシスト量は(a)固定値とされる場合や(b)可変値とされる場合がある。可変値とされる場合には、ブレーキ操作状態に基づいて決まる大きさとされたり、前方車両との相対位置関係に基づいて決まる大きさとされたりする。
エンジンの自動停止状態においては、アシスト量が(a)エンジンの作動状態において固定値Yである場合に、その固定値Yより大きい固定値(Y+Δ)としたり、(b)エンジンの作動状態において可変値AYである場合に、その可変値AYより設定量だけ大きい値(AY+Δ)としたりすることができる。また、アシスト量を決定するための規則を異ならせることによって、エンジンの自動停止状態において決定されたアシスト量が、作動状態において決定されたアシスト量より大きくなるようにすることもできる。
(14)前記アシスト量決定部が、前記エンジンの自動停止状態におけるアシスト量を、前記バキュームブースタの負圧室の圧力が大気圧に近い場合に真空に近い場合より大きい値に決定するブースタ負圧対応アシスト量決定部を含む(13)項に記載の車両制御装置。
ブースタ負圧が大気圧に近い場合は真空に近い場合より、最大助勢力が小さくなるため、ブースタが助勢限界に達した後のマスタシリンダ液圧が小さくなる。また、助勢限界に達する前においてもブースタの助勢遅れによりマスタシリンダ液圧が小さくなる。そのため、ブースタ負圧が大気圧に近い場合に真空に近い場合より、アシスト量を大きい値とすれば、ブースタ負圧が大気圧に近くても、制動力不足を抑制したり、効き遅れを抑制したりすることができる。また、エンジンの作動状態における場合と同様の制動力が得られるようにすることも可能である。
なお、エンジンの作動状態におけるアシスト量Yに加える増加分Δが、ブースタ負圧の大きさで決まるようにすることもできる。
(15)前記ブレーキ制御装置が、前記マスタシリンダの液圧と、その液圧と1対1に対応する物理量との少なくとも一方を含む液圧関連量が、前記バキュームブースタが助勢限界に達したとみなされる助勢限界判定しきい値より大きい場合に前記開始条件が成立したとして、前記アシスト制御を実行する助勢限界後アシスト制御部を含む(3)項ないし(14)項のいずれか1つに記載の車両制御装置。
ブースタが助勢限界に達する前後で、ブレーキ操作力とマスタシリンダ液圧との関係が同じになるように、助勢限界後にブレーキの出力が大きくされる。それにより、バキュームブースタが助勢限界に達した後においても、ブレーキフィーリングの低下を抑制することができる。
(16)前記開始条件決定部が、前記エンジンの自動停止状態において、前記エンジンの作動状態における場合より、前記助勢限界判定しきい値を小さい値に決定する助勢限界判定しきい値決定部を含む(15)項に記載の車両制御装置。
(17)車両の車輪に設けられ、車輪の回転を抑制するブレーキと、
ブレーキ操作部材の操作力を、負圧室と変圧室との差圧により倍力して出力するバキュームブースタと、
そのバキュームブースタの出力により加圧ピストンが前進させられると、その前方の加圧室に液圧を発生させるマスタシリンダと、
少なくとも、そのマスタシリンダの液圧の変化勾配が、緊急操作判定しきい値を超えると、前記ブレーキの出力を、前記ブレーキ操作部材の操作状態で決まる出力より大きくする緊急操作時アシスト制御装置と
を含み、前記緊急操作時アシスト制御装置が、前記負圧室の圧力が大気圧に近い場合は真空に近い場合より、前記緊急操作判定しきい値を小さい値に決定するしきい値決定部を含むことを特徴とするブレーキ装置。
本項に記載のブレーキ装置においては、バキュームブースタの負圧室の圧力が大気圧に近い場合には真空に近い場合より、緊急操作判定しきい値が小さい値に決定される。それによって、負圧室の圧力が大気圧に近い場合であっても適切に緊急時アシスト制御が実行されるようにすることができる。
本項に記載の車両制御装置においては、(1)項ないし(16)項のいずれか1つに記載の技術的特徴を採用することができる。
最初に、本発明の複数の実施例に係る車両制御装置の共通の構造について説明する。
〔共通の車両制御装置の構造〕
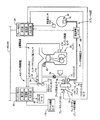
車両制御装置は、図1に示すように、ブレーキ制御装置2とエンジン制御装置4とを含み、車両制御装置を備えた車両には、ブレーキ制御装置2を備えたブレーキ装置6と、エンジン制御装置4を備えた駆動装置8とが設けられる。
ブレーキ装置6において、ブレーキペダル10の踏力がバキュームブースタ12により倍力され、その倍力された踏力に応じた液圧がマスタシリンダ14に発生させられる。この液圧は、車輪に設けられたブレーキ16のブレーキシリンダ18に供給され、それによってブレーキ16が作動させられて車輪の回転が抑制される。また、ブレーキシリンダ18とマスタシリンダ14との間には、ブレーキシリンダ18の液圧を制御可能なアクチュエータである液圧制御ユニット20が設けられる。液圧制御ユニット20は、実行部、記憶部、入出力部等を含むコンピュータを主体とするブレーキECU24により制御され、ブレーキシリンダ18の液圧が制御される。
ブースタ12とインテークマニホルド32との間にはチェック弁36が設けられている。それにより、ブースタ12側の負圧は、インテークマニホルド32側の負圧より大気圧に近づくことが回避される。
駆動装置8において、エンジン30の燃料噴射弁40,スタータモータ42,スロットルバルブ34等が、実行部、記憶部、入出力部等を含むコンピュータを主体とするエンジン等ECU44によって制御され、それによって、エンジン30の作動状態が制御される。 ブレーキECU24とエンジン等ECU44とは、CAN(Car Area Network)46を介して接続され、種々の情報の通信が行われる。
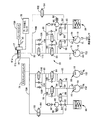
ブースタ12は、中空のハウジング64と、ハウジング64内に設けられたパワーピストン66とを含み、パワーピストン66によりマスタシリンダ14の側の負圧室68とブレーキペダル10の側の変圧室70とに仕切られる。
パワーピストン66は、ブレーキペダル10側において、バルブオペレーティングロッド71を介してブレーキペダル10と連携させられ、マスタシリンダ14側において、リアクションディスク72を介してブースタピストンロッド74と連携させられている。ブースタピストンロッド74はマスタシリンダ14の加圧ピストン60aに連携させられ、パワーピストン66の作動力を加圧ピストン60aに伝達する。
負圧室68の圧力(以下、ブースタ負圧と略称することがある)は、ブースタ負圧センサ78によって検出され、マスタシリンダ14の加圧室61bの液圧はマスタシリンダ圧センサ79によって検出される。
リザーバ86にはポンプ通路90が接続され、主通路80の増圧弁90の上流側に接続される。ポンプ通路90には、ポンプ92、吸入弁93,94、吐出弁96等が設けられる。ポンプ92はポンプモータ98によって駆動される。また、吸入弁93,94の間には、マスタシリンダ14が補給通路100を介して接続され、補給通路100には、補給弁102が設けられる。
前記主通路80のポンプ通路90の接続部とマスタシリンダ14との間に圧力制御弁110が設けられる。圧力制御弁110は、ブレーキシリンダ18側の液圧とマスタシリンダ14側の液圧との差圧を制御するものであり、ブレーキシリンダ18の液圧をマスタシリンダ14の液圧に対して、制御差圧だけ高くする。
この圧力制御弁110において、ソレノイド128が励磁されない非作用状態(OFF状態)では開状態にある。ブレーキ操作が行われれば、ブレーキシリンダ圧はマスタシリンダ液圧と同じとなり、マスタシリンダ液圧の増加に伴って増加させられる。
ソレノイド128が励磁される作用状態(ON状態)では、弁子120に、ブレーキシリンダ圧とマスタシリンダ液圧との差に基づく力F2 とスプリング126の弾性力F3 との和と、ソレノイド128の電磁力に基づく吸引力F1 とが互いに逆向きに作用する。ブレーキシリンダ圧とマスタシリンダ液圧との差圧F2 は、弾性力F3 が同じ場合に、吸引力F1 が大きい場合は小さい場合より大きくなるのであり、ソレノイド128への供給電流の制御によって、これらの差圧が制御される。
なお、図3に示すように、圧力制御弁110と並列に逆止弁134、リリーフ弁136が設けられている。逆止弁134により、圧力制御弁110が異常であっても、マスタシリンダ14からブレーキシリンダ18へ向かう作動液の流れが許容される。また、リリーフ弁136により、ブレーキシリンダ側の液圧、すなわち、ポンプ92による吐出圧が過大となることを回避する。
本実施形態においては、圧力制御弁110,リザーバ86,ポンプ92,ポンプモータ98等により液圧制御ユニット20が構成される。
ブレーキECU24の入力部には、図1に示すように、ブースタ負圧センサ78,マスタシリンダ圧センサ79に加えて、ブレーキスイッチ150,車輪速センサ152等が接続される。ブレーキスイッチ150は、ブレーキペダル10の操作状態においてON信号を出力する。車輪速センサ152は、各輪毎に設けられ、各輪の車輪速を表す車輪速信号を出力する。ブレーキECU24において、4輪の車輪速に基づいて車両の走行速度が取得される。ブレーキECU24の出力部には、ポンプモータ98が図示しない駆動回路を介して接続されるとともに、圧力制御弁110のソレノイド128、増圧弁84、減圧弁88および補給弁102のソレノイド160,162,164が、それぞれ、駆動回路を介して接続される。また、ブレーキECU24の記憶部には、複数のプログラム、テーブル等が記憶されている。
共通の実施例においては、ブレーキペダル10の緊急操作が行われた場合には、ブレーキシリンダ18の液圧を、マスタシリンダ14の液圧、すなわち、ブレーキペダル10の操作力に対応する液圧より増加させる緊急操作時アシスト制御が行われる。補給弁102が開状態に切り換えられて、ポンプ92が作動させられ、圧力制御弁110が制御される。ブレーキシリンダ18の液圧は、圧力制御弁110への供給電流量に応じた大きさだけマスタシリンダ14の液圧より大きくされる。緊急操作時アシスト制御において、ブレーキシリンダ18の液圧は、(a)マスタシリンダ18の液圧より予め定められた設定アシスト量(固定値)だけ増圧させられるようにしたり、(b)前方車両との車間距離等の車両の状態に基づいて決まるアシスト量だけ増圧させられるようにしたり、(c)ブレーキペダル10の操作状態(例えば、マスタシリンダ液圧Pm)に基づいて決まるアシスト量ΔPw(ΔPw=Pm・K)だけ増加させられるようにしたりすること等ができる。
ステップ1(以下、S1と略称する。他のステップについても同様とする)において、ブレーキスイッチ150がON状態にあるか否かが判定され、ON状態にある場合には、S2において、開始条件としてのアシスト条件が成立するか否かが判定される。ブレーキペダル10の緊急操作が検出された場合に、アシスト条件が成立したと判定される。そして、アシスト条件が成立した場合には、S3においてアシスト制御が行われる。
なお、共通の実施例において、ブレーキ装置6のブレーキ回路がX配管とされていたが、前後配管とすることもできる等ブレーキ装置6の構造については問わない。
エンジン等ECU44には、インテークマニホルド32の負圧を検出するインテークマニホルド負圧センサ170,電子制御式スロットルバルブ34の開度を検出するスロットルポジションセンサ172,エンジン30の回転数を検出するエンジン回転数センサ174、図示しないアクセルペダルの開度を検出するアクセル開度センサ176等が接続されるとともに、スロットルバルブ34,燃料噴射弁40,スタータモータ42等が接続される。また、記憶部には、複数のプログラム、テーブル等が記憶される。
また、図6のフローチャートで表されるエンジン自動停止・再始動プログラムが実行される。
本実施例においては、走行中に、エンジン40が自動で停止させられたり、自動で再始動させられたりするのであり、それにより、燃費の向上が図られる。
S11において、車両が走行中であるか否かが判定される。車両の走行速度が停止状態とみなし得る設定速度より大きいか否かが判定されるのである。走行中である場合には、S12において、エンジン30が作動状態であるか否かが判定される。作動状態にある場合には、S13において、エンジン自動停止条件が成立するか否かが判定され、成立する場合には、S14において、エンジン40が自動で停止させられる。例えば、アクセル開度が加速の意図がないとみなされる設定開度以下であること、車両の走行速度が設定速度以下であること、路面勾配が設定勾配以下であること等の3つの条件がエンジン自動停止条件とされ、これら3つの条件が満たされた場合に、エンジン30が停止させられる。エンジン30に燃料が供給されなくなり、トランスミッションが非係合状態とされる。
また、エンジン30が停止状態にある場合には、S12の判定がNOとなり、S15において、再始動条件が成立するか否かが判定される。再始動条件が成立した場合には、S16において、エンジン30が自動で再始動させられる。例えば、アクセル開度が加速の意図があるとみなされる設定開度以上であること、ブースタ12の負圧室68の負圧が設定圧より大気圧側にあることとの少なくとも一方が満たされた場合に再始動条件が満たされたとされて、再始動させられる。スタータモータ42が作動させられ、燃料供給が開始される。また、トランスミッションが係合状態に切り換えられる。
なお、エンジン30の自動停止条件、再始動条件は、本共通の実施例における条件に限らない。
一方、図7に示すように、緊急操作が行われた場合には、ブースタ負圧が大気圧に近い場合は、真空に近い場合より、マスタシリンダ液圧の増加遅れが大きくなり、マスタシリンダ液圧が相対的に小さくなる。また、最大助勢力が小さくなるため、ブースタ12が助勢限界に達した後のマスタシリンダ液圧が小さくなる。
このように、ブースタ負圧が大気圧に近い場合と真空に近い場合とで、緊急操作が行われた場合のマスタシリンダ液圧の変化の状態が異なるため、エンジン30の作動状態と自動停止状態とで、異なる態様でアシスト制御が行われることは妥当なことである。以下の各実施例において具体的に説明する。
Pm>ThP
dPm>ThdP
マスタシリンダ液圧の増加勾配dPmが緊急操作判定しきい値ThdPより大きいことと、マスタシリンダ液圧Pmが緊急操作判定しきい値ThPより大きいこととの両方が満たされた場合に、緊急操作であると検出されるため、緊急操作であるか否かを正確に判定することができる。
エンジン30の作動状態においては、ブースタ負圧が真空に近い状態にあると推定されるため、図8(a)の実線の変化に基づき、緊急操作判定しきい値ThPo,ThdPoが設定される。
しかし、エンジン30の自動停止状態において、ブースタ負圧が大気圧に近い場合には、図8(a)の破線が示すように、マスタシリンダ液圧の増圧遅れが大きいため、マスタシリンダ液圧が緊急操作判定しきい値ThPoに達した時点で、実際の増加勾配dPm1が緊急操作判定しきい値ThdPoより小さく(dPm1<ThdPo)、アシスト条件が成立しない場合がある。
それを回避するために、実施例1においては、図8(b)に示すように、エンジン30の自動停止状態において、エンジン30の作動状態における場合より、マスタシリンダ液圧の緊急操作判定しきい値を設定圧ΔPoだけ小さい値に設定し、マスタシリンダ液圧の増加勾配の緊急操作判定しきい値を設定勾配ΔdPoだけ小さい値に設定したのである。
図8(a)に示すように、ブースタ負圧が大気圧に近い場合は真空に近い場合より、最大助勢力が小さくなるため、ブースタ12が助勢限界に達した後におけるマスタシリンダ液圧が低くなる。また、緊急操作時には、大きな操作力でブレーキペダル10が操作されるのが普通であるため、助勢限界に達することが多い。そこで、実施例1においては、エンジン30の自動停止状態におけるアシスト量ΔPwを、標準アシスト量ΔPwoよりΔwだけ大きくしたのである。Δwは、予め定められた固定値であり、例えば、ブースタ負圧が第1設定圧以上大気圧に近い場合と、第2設定圧以上真空に近い場合とでの最大助勢力の差の平均的な値、あるいは、差の最大の値に基づいて決まる値とすることができる。
なお、図8(a)において、時間の経過に伴ってマスタシリンダ液圧が低下するのは、運転者がブレーキペダル10に加える操作力が小さくなるのが普通であるからである。
S21において、車両が走行中であるか否かが判定される。走行中である場合には、S22において、エンジン30が自動停止状態にあるか否かが判定される。エンジン30が作動状態にある場合には、S22の判定がNOとなり、S23において、マスタシリンダ液圧についての緊急操作判定しきい値ThP、増加勾配についての緊急操作判定しきい値ThdPが、それぞれ、標準値ThPo,ThdPoとされ、S24において、アシスト量ΔPwが標準アシスト量ΔPwoとされる。
ThP←ThPo
ThdP←ThdPo
ΔPw←ΔPwo
それに対して、エンジン30が自動停止状態にある場合には、S25において、マスタシリンダ液圧、増加勾配についての緊急操作判定しきい値ThP,ThdPが、それぞれ標準値より小さい値(ThPo−ΔPo),(ThdPo−ΔdPo)とされ、S26において、アシスト量ΔPwが標準アシスト量より大きい値(ΔPwo+Δw)とされる。
ThP←ThPo−ΔPo
ThdP←ThdPo−ΔdPo
ΔPw←ΔPwo+Δw
例えば、実施例1においては、マスタシリンダ液圧が図8(a)の破線が示すように変化する場合(ブースタ負圧が大気圧に近い場合)に、実線が示すように変化する場合(ブースタ負圧が真空に近い場合)より、Δtだけアシスト制御が遅れて開始されたが、ΔPo,ΔdPoをさらに大きい値とし、マスタシリンダ液圧についての緊急操作判定しきい値、増加勾配についての緊急操作判定しきい値を、さらに小さい値ThPs{ThPs<(ThPo−ΔP)}、ThdPs{ThdPs<(ThdPo−ΔdP)}とした場合には、ブースタ負圧が大気圧に近い場合であっても、真空に近い場合と同じ時期toにアシスト制御が開始されるようにすることができる(Pm3>ThPs、dPm3>ThdPs)。
また、ΔPo,ΔdPoをさらに大きい値として、緊急操作判定しきい値をさらに小さい値とすれば、真空に近い場合より早期に(時期toより前に)アシスト制御が開始されるようにすることもできる。
さらに、エンジン30の自動停止状態において、マスタシリンダ液圧についての緊急操作判定しきい値ThPと、増加勾配についての緊急操作判定しきい値ThdPとの両方を、小さい値に決定することは不可欠ではなく、いずれか一方が小さい値に決定されるようにしてもよい。
また、エンジン30の自動停止状態において実際のブースタ負圧PBOを検出し、ブースタ負圧PBOが設定圧以上大気圧に近い場合に、緊急操作判定しきい値が決定されるようにすることもできる。
また、エンジン30の自動停止状態において、ブースタ負圧が真空に近い場合には、エンジン30の作動状態におけるアシスト量と同じにすることもできる。アシスト量を大きくする必要性が低いからである。
さらに、エンジン30の作動状態におけるアシスト量が標準アシスト量ΔPwoとされている場合について説明したが、アシスト量は、マスタシリンダ液圧に応じた大きさに決定される場合や、前方車両との相対距離等に基づく大きさに決定される場合もある。これらの場合であっても、エンジン30の自動停止状態におけるアシスト量は、エンジン30の作動状態において決定されたアシスト量より大きい値とされる。
例えば、エンジン作動状態において、アシスト量ΔPwが、マスタシリンダ液圧Pmに係数k(0<k<1)を掛けた大きさに決定される場合(ΔPwo=k・Pm)において、エンジン停止状態におけるアシスト量ΔPwを作動状態におけるアシスト量ΔPwoより{Δw=k′・Pm(0<k′<k)}だけ大きい値
ΔPw=ΔPwo+k′・Pm=(k+k′)・Pm
とすることができる。
Pm<ThP
dPm>ThdP
マスタシリンダ液圧がアシスト要判定しきい値より小さい場合に、アシスト条件が満たされるとしたのは、マスタシリンダ液圧が大きい場合には、アシスト制御が行われなくても、充分に大きなマスタシリンダ液圧が得られるからである。この意味において、緊急操作であるか否かは、マスタシリンダ液圧の増加勾配のみに基づいて判定されることになる。
図10に示すように、ブースタ負圧が大気圧に近い場合は真空に近い場合より、ブースタ12の助勢遅れにより、操作力の増加勾配が同じであっても、マスタシリンダ液圧の増加勾配が相対的に小さくなる(dPm1>dPm2)。
その結果、図11(a)、(b)に示すように、ブースタ負圧が真空に近い場合においては、操作力に基づいて決まる緊急操作時アシスト制御が必要であるとみなされる領域RFと実線で示すマスタシリンダ液圧に基づいて決まる緊急操作時アシスト制御が必要であるとみなされる領域RMとが対応し、ブースタ負圧が大気圧に近い場合には、領域RFと破線で示す領域RM´(マスタシリンダ液圧に基づいて決まる緊急操作時アシスト制御が必要であるとみなされる領域)とが対応する。なお、領域RM´については、領域RMとアシスト要判定しきい値は同じ値とした。
それに対して、エンジン30の自動停止状態においては、マスタシリンダ液圧の増加勾配の緊急操作判定しきい値ThdPが、エンジン30の作動状態における値以下であって、実際のブースタ負圧に基づいて決まる値とされ、アシスト要判定しきい値ThPは、エンジン30の作動状態における場合と同じ大きさとされる(ThP1)。
図12に示すブースタ負圧と緊急操作判定しきい値との関係が予め記憶部に記憶されており、これら関係と、ブースタ負圧センサ78によって検出された実際のブースタ負圧PBOとから、しきい値ThdP2が決定されるのである。
図12に示すように、ブースタ負圧PBOが大気圧に近い場合は真空に近い場合より、緊急操作判定しきい値ThdP2が小さい値に決定される。また、ブースタ負圧PBOが設定圧VPBOより真空に近い場合には、エンジン30が自動停止状態にあってもエンジン30の作動状態にある場合と同じ値ThdP1とされる。エンジン30が自動停止状態にあっても、ブースタ負圧PBOが真空に近い場合には、エンジン30が作動状態にある場合と同様の開始条件を用いても差し支えないからである。
S31において、走行中か否かが判定され、走行中である場合には、S32において、エンジン30が自動停止状態にあるか否かが判定される。エンジン30が作動状態にある場合には、判定がNOとなり、S33において、アシスト要判定しきい値ThP、緊急操作判定しきい値ThdPが、それぞれ、標準値ThP1,ThdP1とされる。
ThP←ThP1
ThdP←ThdP1
それに対して、エンジン30が自動停止状態にある場合には、S34において、ブースタ負圧センサ78による検出値が読み込まれ、S35において、実際のブースタ負圧PB0と図12のマップで表されるテーブルとに基づいて、緊急操作判定しきい値ThdP2が求められる。また、アシスト要判定しきい値ThPは標準値ThP1とされる。
(ThP←ThP1)
ThdP←ThdP2
このように取得されたしきい値が、ブレーキアシスト制御におけるS2において、実際のマスタシリンダ液圧、増加勾配と比較され、マスタシリンダ液圧Pmがアシスト要判定しきい値ThPより小さく、かつ、増加勾配dPmが緊急操作判定しきい値ThdPより大きい場合に、アシスト条件が満たされたとされて、S3において、アシスト制御が開始される。
また、エンジン30の自動停止状態においても、実際のブースタ負圧が検出され、それい基づいて緊急操作判定しきい値が決定されるため、真に必要な場合に限って、緊急操作判定しきい値が小さくされることになる。その結果、エンジン30の自動停止状態において、真に必要な場合に、アシスト制御が開始されるようにすることが可能となり、消費電力の低減を図ることもできる。
また、アシスト要判定しきい値は、エンジン30の自動停止状態においてもエンジン30の作動状態における場合と同じ標準値とされるため、エンジン30の自動停止状態において、エンジン30の作動状態における場合より、大きな踏力で操作されても、アシスト制御が開始されるようにすることができる。その結果、ブースタ12の助勢遅れに起因してマスタシリンダ液圧が小さくなっても制動力不足を抑制することができる。
また、緊急操作判定しきい値ThdPは、ブースタ負圧PBOの変化に対して、段階的に、変わる値とすることもできる。
さらに、ブースタ負圧はエンジン30の作動状態に基づいて推定して取得することもできる。スロットル開度、エンジン回転数、インテークマニホールド32の圧力等、あるいは、これらの経時的な変化等に基づけば、ブースタ負圧を推定することができる。このように、推定されたブースタ負圧を使用すれば、ブースタ負圧センサ78が不要となるため、その分、コストダウンを図ることができる。
さらに、実施例1と実施例2とを適宜組み合わせて実行することもできる等、本発明は、上述に記載の態様の他、当業者の知識に基づいて種々の変更、改良を施した態様で、実施することができる。
Claims (9)
- 車両の走行中に、エンジンを自動で停止させるエンジン制御装置と、
前記車両の車輪の回転を抑制するブレーキの出力を、開始条件が成立した場合に、ブレーキ操作部材の操作状態に対応する大きさよりアシスト量だけ大きくするアシスト制御を行うブレーキ制御装置と
を含む車両制御装置であって、
前記ブレーキ制御装置が、前記エンジンが前記エンジン制御装置によって自動で停止させられている自動停止状態において、前記エンジンの作動状態におけるアシスト制御とは異なる態様で前記アシスト制御を実行する自動停止中アシスト制御部を含むとともに、前記自動停止中アシスト制御部が、前記エンジンの自動停止状態における前記開始条件を、前記エンジンの作動状態における場合に比較して成立し易い条件に決定する開始条件決定部を含むことを特徴とする車両制御装置。 - 前記車両が、(a)前記ブレーキ操作部材の操作力を、負圧室と変圧室との差圧により倍
力して出力するバキュームブースタと、(b)そのバキュームブースタの出力により加圧ピ
ストンが前進させられることにより、その前方の加圧室に液圧を発生させるマスタシリンダと、(c)前記エンジンの作動により、前記バキュームブースタの負圧室に負圧を供給す
る負圧供給機構とを含み、
前記ブレーキ制御装置が、前記マスタシリンダの液圧と、その液圧と1対1に対応する物理量との少なくとも一方を含む液圧関連量と、その液圧関連量の増加勾配との少なくとも一方が、その少なくとも一方に対応する緊急操作判定しきい値より大きい場合に前記開始条件が成立したとして、前記アシスト制御を開始する緊急操作時アシスト制御部を含み、
前記開始条件決定部が、前記エンジンの自動停止状態における前記少なくとも一方に対応する緊急操作判定しきい値を、前記エンジンの作動状態における場合より小さい値に決定する緊急操作判定しきい値決定部を含む請求項1に記載の車両制御装置。 - 前記緊急操作判定しきい値決定部が、前記少なくとも1つに対応する緊急操作判定しきい値を、予め定められた固定値に決定する固定型しきい値決定部を含む請求項2に記載の車両制御装置。
- 前記緊急操作判定しきい値決定部が、前記少なくとも1つに対応する緊急操作判定しきい値を、前記バキュームブースタの負圧室の圧力が大気圧に近い場合に真空に近い場合に比較して小さい値に決定する可変型しきい値決定部を含む請求項2または3に記載の車両制御装置。
- 前記緊急操作判定しきい値決定部が、前記少なくとも1つに対応する緊急操作判定しきい値を、前記バキュームブースタの負圧室の圧力が負圧不足判定しきい値より大気圧に近い場合に、前記エンジンの作動状態における場合より小さい値に決定する限定型しきい値決定部を含む請求項2ないし4のいずれか1つに記載の車両制御装置。
- 前記緊急操作時アシスト制御部が、前記液圧関連量が、それに対応する緊急操作判定しきい値より大きく、かつ、前記液圧関連量の増加勾配が、それに対応する緊急操作判定しきい値より大きい場合に、前記開始条件が成立したとして、前記アシスト制御を実行する手段を含む請求項2ないし5のいずれか1つに記載の車両制御装置。
- 前記緊急操作時アシスト制御部が、前記液圧関連量の増加勾配がそれに対応する緊急操作判定しきい値より大きく、かつ、前記液圧関連量がアシスト要判定しきい値より小さい場合に前記開始条件が成立したとして、前記アシスト制御を開始する制動力不足時アシスト制御部を含み、
前記開始条件決定部が、前記エンジンの自動停止状態において、前記緊急操作判定しきい値を前記エンジンの作動状態における場合より小さい値とし、前記アシスト要判定しきい値を、前記エンジンの作動状態における場合と同じ値あるいはより大きい値とする手段を含む請求項2ないし6のいずれか1つに記載の車両制御装置。 - 前記自動停止中アシスト制御部が、前記エンジンの自動停止状態において、前記エンジンの作動状態における場合より前記アシスト量を大きい量に決定するアシスト量決定部を含む請求項1ないし7のいずれか1つに記載の車両制御装置。
- 車両の走行中に、エンジンを自動で停止させるエンジン制御装置と、
前記車両の車輪の回転を抑制するブレーキの出力を、開始条件が成立した場合に、ブレーキ操作部材の操作状態に対応する大きさよりアシスト量だけ大きくするアシスト制御を行うブレーキ制御装置と
を含む車両制御装置であって、
前記ブレーキ制御装置が、前記エンジンが前記エンジン制御装置によって自動で停止させられている自動停止状態において、前記エンジンの作動状態におけるアシスト制御とは異なる態様で前記アシスト制御を実行する自動停止中アシスト制御部を含むとともに、前記自動停止中アシスト制御部が、前記エンジンの自動停止状態において、前記エンジンの作動状態における場合より前記アシスト量を大きい量に決定するアシスト量決定部を含むことを特徴とする車両制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2009/067650 WO2011042987A1 (ja) | 2009-10-09 | 2009-10-09 | 車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2011042987A1 JPWO2011042987A1 (ja) | 2013-02-28 |
| JP5278552B2 true JP5278552B2 (ja) | 2013-09-04 |
Family
ID=43856479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011535255A Expired - Fee Related JP5278552B2 (ja) | 2009-10-09 | 2009-10-09 | 車両制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8876660B2 (ja) |
| JP (1) | JP5278552B2 (ja) |
| CN (1) | CN102548814B (ja) |
| DE (1) | DE112009005307T5 (ja) |
| WO (1) | WO2011042987A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5582107B2 (ja) * | 2011-07-19 | 2014-09-03 | 株式会社アドヴィックス | 車両の制御装置 |
| US9157382B2 (en) * | 2011-12-22 | 2015-10-13 | Toyota Jidosha Kabushiki Kaisha | Idling stop control device, vehicle and vehicle control method |
| JP5737203B2 (ja) * | 2012-02-02 | 2015-06-17 | 株式会社デンソー | エンジン制御装置 |
| JP5600330B2 (ja) * | 2012-02-16 | 2014-10-01 | 富士重工業株式会社 | 車両の運転支援装置 |
| DE102012012798B4 (de) | 2012-06-28 | 2014-11-13 | Andreas Stihl Ag & Co. Kg | Arbeitsgerät mit einer Bremseinrichtung |
| DE102012012827A1 (de) * | 2012-06-28 | 2014-01-02 | Andreas Stihl Ag & Co. Kg | Startsicherheitsschaltung in einem Arbeitsgerät mit einem Verbrennungsmotor |
| DE102012012799A1 (de) | 2012-06-28 | 2014-01-02 | Andreas Stihl Ag & Co. Kg | Arbeitsgerät mit einer Bremseinrichtung |
| DE102012012801A1 (de) | 2012-06-28 | 2014-01-02 | Andreas Stihl Ag & Co. Kg | Arbeitsgerät |
| JP5827198B2 (ja) * | 2012-10-09 | 2015-12-02 | 日信工業株式会社 | 車両用ブレーキ液圧制御装置 |
| WO2014076754A1 (ja) * | 2012-11-13 | 2014-05-22 | 本田技研工業株式会社 | 車両の停止制御装置 |
| JP5856133B2 (ja) * | 2013-12-11 | 2016-02-09 | 本田技研工業株式会社 | 車両用制動システム |
| JP6455386B2 (ja) * | 2015-10-09 | 2019-01-23 | 株式会社アドヴィックス | 車両のブレーキ制御装置 |
| FR3063957B1 (fr) * | 2017-03-15 | 2019-04-05 | Renault S.A.S. | Procede de controle de fonctions automatiques d'un vehicule automobile |
| CN111114516B (zh) * | 2019-12-25 | 2021-04-13 | 一汽解放汽车有限公司 | 一种自动紧急制动系统的控制方法、装置和重型商用车 |
| CN113006757B (zh) * | 2021-02-25 | 2022-12-20 | 三一石油智能装备有限公司 | 电驱压裂橇系统中辅助电机设备控制方法、装置及压裂橇 |
| KR102841440B1 (ko) * | 2024-11-20 | 2025-08-01 | 주식회사 파워중공업 | 중장비용 안전장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08239031A (ja) * | 1995-03-03 | 1996-09-17 | Fujitsu Ten Ltd | ブレーキブースタ装置 |
| JP2000043692A (ja) * | 1998-07-27 | 2000-02-15 | Toyota Motor Corp | 車両の制動制御装置 |
| JP2001071878A (ja) * | 1999-09-03 | 2001-03-21 | Toyota Motor Corp | 制動力制御装置 |
| JP2009063001A (ja) * | 2001-01-26 | 2009-03-26 | Denso Corp | エンジン制御装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3829567B2 (ja) * | 2000-02-21 | 2006-10-04 | 日産自動車株式会社 | 車両のエンジン自動停止再始動装置 |
| JP4051870B2 (ja) * | 2000-09-05 | 2008-02-27 | スズキ株式会社 | エンジンの自動停止始動制御装置 |
| JP4552365B2 (ja) * | 2001-06-27 | 2010-09-29 | 株式会社デンソー | エンジン自動停止再始動装置 |
| DE10317501B4 (de) | 2003-04-16 | 2015-06-03 | Daimler Ag | Verfahren zum Betrieb eines Kraftfahrzeugs |
-
2009
- 2009-10-09 DE DE112009005307T patent/DE112009005307T5/de not_active Withdrawn
- 2009-10-09 JP JP2011535255A patent/JP5278552B2/ja not_active Expired - Fee Related
- 2009-10-09 US US13/496,975 patent/US8876660B2/en not_active Expired - Fee Related
- 2009-10-09 CN CN200980161881.2A patent/CN102548814B/zh not_active Expired - Fee Related
- 2009-10-09 WO PCT/JP2009/067650 patent/WO2011042987A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08239031A (ja) * | 1995-03-03 | 1996-09-17 | Fujitsu Ten Ltd | ブレーキブースタ装置 |
| JP2000043692A (ja) * | 1998-07-27 | 2000-02-15 | Toyota Motor Corp | 車両の制動制御装置 |
| JP2001071878A (ja) * | 1999-09-03 | 2001-03-21 | Toyota Motor Corp | 制動力制御装置 |
| JP2009063001A (ja) * | 2001-01-26 | 2009-03-26 | Denso Corp | エンジン制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2011042987A1 (ja) | 2011-04-14 |
| CN102548814B (zh) | 2014-10-29 |
| US20120190500A1 (en) | 2012-07-26 |
| US8876660B2 (en) | 2014-11-04 |
| JPWO2011042987A1 (ja) | 2013-02-28 |
| CN102548814A (zh) | 2012-07-04 |
| DE112009005307T5 (de) | 2012-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5278552B2 (ja) | 車両制御装置 | |
| US8955922B2 (en) | Brake system for a vehicle and method for operating a brake system of a vehicle | |
| KR101884959B1 (ko) | 브레이크 시스템의 작동 방법, 상기 작동 방법이 수행되는 브레이크 시스템 및 상기 브레이크 시스템을 포함하는 모터 차량 | |
| JP5776153B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP5895916B2 (ja) | 車両の制動制御装置 | |
| WO2011125757A1 (ja) | 車両用ブレーキ装置 | |
| JP2013006529A (ja) | 車両用ブレーキ装置 | |
| JP2015003622A (ja) | ブレーキ制御装置 | |
| JP5659580B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP5787050B2 (ja) | 車両の制御装置 | |
| JP2000095094A (ja) | ブレーキ液圧制御装置 | |
| JP7367427B2 (ja) | 車両の制動装置 | |
| CN110315989B (zh) | 用于车辆的制动装置和制动控制方法 | |
| JP5302869B2 (ja) | ブレーキ制御装置 | |
| KR101415210B1 (ko) | 유압 제동시스템 | |
| JP3870480B2 (ja) | 車両用ブレーキ装置 | |
| KR20150099937A (ko) | 하이브리드 및 전기 차량의 브레이크 시스템 | |
| JP5044583B2 (ja) | ブレーキ制御装置 | |
| WO2015046460A1 (ja) | 車両の制動システム | |
| JP2615806B2 (ja) | 4輪駆動車用加速スリップ制御装置 | |
| JP5977691B2 (ja) | ブレーキ制御装置 | |
| WO2020027068A1 (ja) | 制動制御装置 | |
| JP2019043480A (ja) | 車両用制動装置 | |
| JP2011245927A (ja) | 液圧発生装置 | |
| JP5584457B2 (ja) | ブレーキ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130506 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5278552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |