JP5228004B2 - 撓み可能なカテーテル組立体およびそれを製造する方法 - Google Patents
撓み可能なカテーテル組立体およびそれを製造する方法 Download PDFInfo
- Publication number
- JP5228004B2 JP5228004B2 JP2010165516A JP2010165516A JP5228004B2 JP 5228004 B2 JP5228004 B2 JP 5228004B2 JP 2010165516 A JP2010165516 A JP 2010165516A JP 2010165516 A JP2010165516 A JP 2010165516A JP 5228004 B2 JP5228004 B2 JP 5228004B2
- Authority
- JP
- Japan
- Prior art keywords
- catheter
- assembly
- tendon
- needle
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


























































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0136—Handles therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0009—Making of catheters or other medical or surgical tubes
- A61M25/0012—Making of catheters or other medical or surgical tubes with embedded structures, e.g. coils, braids, meshes, strands or radiopaque coils
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0009—Making of catheters or other medical or surgical tubes
- A61M25/0013—Weakening parts of a catheter tubing, e.g. by making cuts in the tube or reducing thickness of a layer at one point to adjust the flexibility
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M25/0054—Catheters; Hollow probes characterised by structural features with regions for increasing flexibility
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0138—Tip steering devices having flexible regions as a result of weakened outer material, e.g. slots, slits, cuts, joints or coils
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0147—Tip steering devices with movable mechanical means, e.g. pull wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0152—Tip steering devices with pre-shaped mechanisms, e.g. pre-shaped stylets or pre-shaped outer tubes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M2025/004—Multi-lumen catheters with stationary elements characterized by lumina being arranged circumferentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M2025/0063—Catheters; Hollow probes characterised by structural features having means, e.g. stylets, mandrils, rods or wires to reinforce or adjust temporarily the stiffness, column strength or pushability of catheters which are already inserted into the human body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
- A61M25/0082—Catheter tip comprising a tool
- A61M25/0084—Catheter tip comprising a tool being one or more injection needles
- A61M2025/0089—Single injection needle protruding axially, i.e. along the longitudinal axis of the catheter, from the distal tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
- A61M25/0082—Catheter tip comprising a tool
- A61M25/0084—Catheter tip comprising a tool being one or more injection needles
- A61M2025/0089—Single injection needle protruding axially, i.e. along the longitudinal axis of the catheter, from the distal tip
- A61M2025/009—Single injection needle protruding axially, i.e. along the longitudinal axis of the catheter, from the distal tip the needle having a bent tip, i.e. the needle distal tip is angled in relation to the longitudinal axis of the catheter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
- A61M25/0082—Catheter tip comprising a tool
- A61M2025/0096—Catheter tip comprising a tool being laterally outward extensions or tools, e.g. hooks or fibres
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0147—Tip steering devices with movable mechanical means, e.g. pull wires
- A61M2025/015—Details of the distal fixation of the movable mechanical means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M25/0029—Multi-lumen catheters with stationary elements characterized by features relating to least one lumen located at the middle part of the catheter, e.g. slots, flaps, valves, cuffs, apertures, notches, grooves or rapid exchange ports
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M25/005—Catheters; Hollow probes characterised by structural features with embedded materials for reinforcement, e.g. wires, coils, braids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M25/005—Catheters; Hollow probes characterised by structural features with embedded materials for reinforcement, e.g. wires, coils, braids
- A61M25/0051—Catheters; Hollow probes characterised by structural features with embedded materials for reinforcement, e.g. wires, coils, braids made from fenestrated or weakened tubing layer
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Hematology (AREA)
- Pulmonology (AREA)
- Anesthesiology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Materials For Medical Uses (AREA)
Description
別の実施形態では、撓み可能なカテーテルが多数の半径方向の撓み方向を持つ撓み可能な遠位部分を有するために、多テンドン装置が使用される。カテーテルシャフト内には、複数のテンドンが配置されており、複数のテンドンはカテーテルシャフトの第1腔内に配置されている。変更例として、各テンドンは複数の腔から選択された個々の腔に配置されている。各テンドンはカテーテル近位部分のところではカテーテルシャフトのほぼ中心に位置決めされており、また各テンドンはカテーテル遠位部分のところではカテーテルシャフトの中心を半径方向に外れて配置されている。複数のテンドンはカテーテル遠位部分を多数の半径方向に撓ませることができる。カテーテル取っ手はカテーテル遠位部分を撓ませるために複数のテンドンを移動させるための機構を有しており、カテーテル取っ手は多数の撓み半径方向を可能にする。
別の実施形態では、撓み可能なカテーテル組立体は、ニードルの侵入深さを監視するのを助けるためにニードルに連結された圧力変換器を有している。
前記の実施形態の特徴は添付の請求項に詳細に述べられている。これらの実施形態は同様な部分が同様な参照符号により示される下記の説明および添付図面を参照することにより最良に理解されるであろう。
カテーテルシャフト101が形成された後、マンドレルを取り出すことができる。マンドレルの取り出し後、腔は空になる。次いで、必要なら、カテーテル組立体100の内部構成部品をカテーテルシャフト101内に配置することができる。必要なら、カテーテルシャフト101の釣り合いを維持するために、不占有腔に腔充填材を充填することができる。
ストラット328、332、338、342の主な機能は圧縮ケージ122に柱状強度を与えることである。引張荷重が操向テンドン130に加えられてカテーテル遠位部分102の撓みを誘発すると、荷重の反作用が圧縮ケージ122内でストラット328、332、338、342により移送され、そしてカテーテル近位部分104に伝達される。圧縮ケージ122は、一対の対向しているストラット328、332、338または342が位置決めされている平面に対して垂直である方向に最も容易に横方向に撓む。
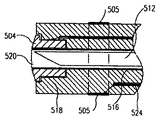
圧縮ケージ122は、溶融接合、接着または幾つかの同等な機械的結合技術により遠位カテーテルシャフト120の内面に取付けられてもよい。変更例として、圧縮ケージ122は遠位カテーテルジャケット120と組み合わされて1つの一体構成部品とされてもよい。変更例として、圧縮ケージ122は、その遠位端部および近位端部が対向したストラット328、332、338、342を介して軸方向荷重を伝達するように連結されているならば、遠位カテーテルシャフト118内に緩く存在してもよい。一実施形態では、熱源は、圧縮ケージ122の遠位部分122−Dおよび近位部分122−Pの上方に付与されるだけであって、ポリマーのみが溶融してこれらの2つの部分の中に入るようになっている。かくして、圧縮ケージ122は遠位部分122−Dと近位部分122−Pとの間の部分に緩く位置する。
幾つかの用途では、正確な回転応答が達成すべき魅力的な性能基準である。心臓の左心室における梗塞帯域への局部的な薬剤の送出しのような治療は予想可能な空間的投与を必要とする。従って、ニードルのような治療器具を互いから一定の間隔(例えば、1cm)以内の多数の目標部位に送出すことができることが重要である。プルワイヤは、緊張下でカテーテルシャフトの一方の側を圧縮状態にする。これにより、潜在的に、シャフトのウイッピングを生じ、その結果、カテーテルの未制御の回転運動が生じる。
以下に論述する模範的な実施形態は、多数の撓み方向を有するカテーテル組立体を説明する図45ないし図52を参照して説明するものである。これらの実施形態によれば、カテーテル組立体はカテーテルシャフトのまわりに360度、多数の方向またはあらゆる方向に撓む。これにより、カテーテルシャフトを回す必要が無くなる。図45ないし図52の実施形態は、使用し易いカテーテル組立体にあり、そして正確な治療投与で3D空洞内のあらゆる目標部位に届くことが可能である。
Claims (2)
- カテーテル近位部分およびカテーテル遠位部分を有しているカテーテルシャフトを備えており、前記カテーテル遠位部分は前記カテーテル近位部分より可撓性であり、
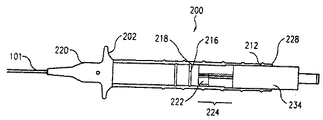
前記カテーテルシャフトの第1腔内に配置されたテンドン組立体およびニードル組立体を備えており、前記テンドン組立体は、引っ張られると、前記カテーテル遠位部分を撓ませることができ、
前記カテーテル近位部分のところで前記カテーテルシャフトに連結されたカテーテル取っ手を備えており、前記カテーテル取っ手は前記テンドン組立体を制御するための第1制御機構と、前記ニードル組立体を制御するための第2制御機構とを有しており、
前記カテーテル近位部分に沿っては、前記テンドン組立体はほぼ中央に位置決めされており、前記ニードル組立体は前記テンドン組立体のまわりに巻き付けられており、
前記カテーテル遠位部分に沿っては、前記テンドン組立体は前記カテーテル遠位部分の撓みを許容するために前記カテーテルシャフトの中心を外れて位置決めされており、前記ニードル組立体は前記テンドン組立体のまわりに巻き付けられていない、撓み可能なカテーテル組立体。 - カテーテル近位部分およびカテーテル遠位部分を有しているカテーテルシャフトを備えており、前記カテーテル遠位部分は前記カテーテル近位部分より可撓性であり、
前記カテーテルシャフトの第1腔内にテンドン組立体が配置されており、前記テンドンは引っ張られると、前記カテーテル遠位部分を撓ませることができ、
前記第1腔内にニードル組立体が配置されており、前記ニードル組立体は引込み可能且つ伸張可能であり、
前記カテーテルシャフトに連結されたカテーテル取っ手を備えており、前記カテーテル取っ手は前記テンドン組立体を制御するための第1制御機構と、前記ニードル組立体を制御するための第2制御機構とを有しており、
前記カテーテル近位部分に沿っては、前記ニードル組立体は前記カテーテルシャフト内にほぼ中央に位置決めされており、前記テンドン組立体は前記ニードル組立体のまわりに巻き付けられており、
前記カテーテル遠位部分に沿っては、前記テンドン組立体は前記カテーテル遠位部分の撓みを許容するために前記カテーテルシャフトの中心を外れて位置決めされており、前記テンドン組立体は前記ニードル組立体のまわりに巻き付けられていない、撓み可能なカテーテル組立体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/676,616 | 2003-09-30 | ||
| US10/676,616 US7998112B2 (en) | 2003-09-30 | 2003-09-30 | Deflectable catheter assembly and method of making same |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006533979A Division JP4907351B2 (ja) | 2003-09-30 | 2004-09-23 | 撓み可能なカテーテル組立体およびそれを製造する方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010264280A JP2010264280A (ja) | 2010-11-25 |
| JP5228004B2 true JP5228004B2 (ja) | 2013-07-03 |
Family
ID=34377428
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006533979A Expired - Fee Related JP4907351B2 (ja) | 2003-09-30 | 2004-09-23 | 撓み可能なカテーテル組立体およびそれを製造する方法 |
| JP2010165516A Expired - Fee Related JP5228004B2 (ja) | 2003-09-30 | 2010-07-23 | 撓み可能なカテーテル組立体およびそれを製造する方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006533979A Expired - Fee Related JP4907351B2 (ja) | 2003-09-30 | 2004-09-23 | 撓み可能なカテーテル組立体およびそれを製造する方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US7998112B2 (ja) |
| EP (2) | EP2308540B1 (ja) |
| JP (2) | JP4907351B2 (ja) |
| AT (1) | ATE524210T1 (ja) |
| ES (2) | ES2492140T3 (ja) |
| HK (1) | HK1156555A1 (ja) |
| WO (1) | WO2005032637A2 (ja) |
Families Citing this family (200)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6095149A (en) * | 1996-08-13 | 2000-08-01 | Oratec Interventions, Inc. | Method for treating intervertebral disc degeneration |
| US6702744B2 (en) * | 2001-06-20 | 2004-03-09 | Advanced Cardiovascular Systems, Inc. | Agents that stimulate therapeutic angiogenesis and techniques and devices that enable their delivery |
| US7455666B2 (en) | 2001-07-13 | 2008-11-25 | Board Of Regents, The University Of Texas System | Methods and apparatuses for navigating the subarachnoid space |
| US8608661B1 (en) | 2001-11-30 | 2013-12-17 | Advanced Cardiovascular Systems, Inc. | Method for intravascular delivery of a treatment agent beyond a blood vessel wall |
| US8150519B2 (en) | 2002-04-08 | 2012-04-03 | Ardian, Inc. | Methods and apparatus for bilateral renal neuromodulation |
| US7653438B2 (en) | 2002-04-08 | 2010-01-26 | Ardian, Inc. | Methods and apparatus for renal neuromodulation |
| US8774913B2 (en) | 2002-04-08 | 2014-07-08 | Medtronic Ardian Luxembourg S.A.R.L. | Methods and apparatus for intravasculary-induced neuromodulation |
| US7361368B2 (en) | 2002-06-28 | 2008-04-22 | Advanced Cardiovascular Systems, Inc. | Device and method for combining a treatment agent and a gel |
| US7326238B1 (en) * | 2002-09-30 | 2008-02-05 | Abbott Cardiovascular Systems Inc. | Method and apparatus for treating vulnerable plaque |
| US7008411B1 (en) * | 2002-09-30 | 2006-03-07 | Advanced Cardiovascular Systems, Inc. | Method and apparatus for treating vulnerable plaque |
| US8821473B2 (en) | 2003-04-15 | 2014-09-02 | Abbott Cardiovascular Systems Inc. | Methods and compositions to treat myocardial conditions |
| US8038991B1 (en) | 2003-04-15 | 2011-10-18 | Abbott Cardiovascular Systems Inc. | High-viscosity hyaluronic acid compositions to treat myocardial conditions |
| US8383158B2 (en) | 2003-04-15 | 2013-02-26 | Abbott Cardiovascular Systems Inc. | Methods and compositions to treat myocardial conditions |
| US7912531B1 (en) | 2003-12-17 | 2011-03-22 | Advanced Cardiovascular Systems, Inc. | Magnetic resonance imaging coils |
| US7854944B2 (en) * | 2004-12-17 | 2010-12-21 | Advanced Cardiovascular Systems, Inc. | Tissue regeneration |
| US8828433B2 (en) | 2005-04-19 | 2014-09-09 | Advanced Cardiovascular Systems, Inc. | Hydrogel bioscaffoldings and biomedical device coatings |
| US8187621B2 (en) * | 2005-04-19 | 2012-05-29 | Advanced Cardiovascular Systems, Inc. | Methods and compositions for treating post-myocardial infarction damage |
| US8303972B2 (en) * | 2005-04-19 | 2012-11-06 | Advanced Cardiovascular Systems, Inc. | Hydrogel bioscaffoldings and biomedical device coatings |
| US9539410B2 (en) | 2005-04-19 | 2017-01-10 | Abbott Cardiovascular Systems Inc. | Methods and compositions for treating post-cardial infarction damage |
| US20080125745A1 (en) * | 2005-04-19 | 2008-05-29 | Shubhayu Basu | Methods and compositions for treating post-cardial infarction damage |
| US20060247750A1 (en) * | 2005-04-28 | 2006-11-02 | Seifert Kevin R | Guide catheters for accessing cardiac sites |
| US8968379B2 (en) * | 2005-09-02 | 2015-03-03 | Medtronic Vascular, Inc. | Stent delivery system with multiple evenly spaced pullwires |
| WO2007056590A1 (en) * | 2005-11-08 | 2007-05-18 | Trustees Of Boston University | Manipulators employing multiple deformable elongate members |
| US7647124B2 (en) * | 2005-11-15 | 2010-01-12 | Medtronic, Inc. | Delivery catheter |
| US7729782B2 (en) * | 2005-11-15 | 2010-06-01 | Medtronic, Inc. | Delivery catheter |
| US8764820B2 (en) * | 2005-11-16 | 2014-07-01 | Edwards Lifesciences Corporation | Transapical heart valve delivery system and method |
| US7650184B2 (en) * | 2005-12-01 | 2010-01-19 | Boston Scientific Neuromodulation Corporation | Cylindrical multi-contact electrode lead for neural stimulation and method of making same |
| US7867169B2 (en) * | 2005-12-02 | 2011-01-11 | Abbott Cardiovascular Systems Inc. | Echogenic needle catheter configured to produce an improved ultrasound image |
| US8303505B2 (en) * | 2005-12-02 | 2012-11-06 | Abbott Cardiovascular Systems Inc. | Methods and apparatuses for image guided medical procedures |
| US8430863B2 (en) | 2005-12-02 | 2013-04-30 | Abbott Cardiovascular Systems Inc. | Visualization of a catheter viewed under ultrasound imaging |
| US8382674B2 (en) * | 2005-12-02 | 2013-02-26 | Abbott Cardiovascular Systems Inc. | Visualization of a catheter viewed under ultrasound imaging |
| US8540696B2 (en) | 2005-12-29 | 2013-09-24 | Biosense Webster, Inc. | Deflectable catheter with a high modulus fiber puller element |
| US20070185479A1 (en) * | 2006-02-06 | 2007-08-09 | Liming Lau | Methods and devices for performing ablation and assessing efficacy thereof |
| US7766896B2 (en) * | 2006-04-25 | 2010-08-03 | Boston Scientific Scimed, Inc. | Variable stiffness catheter assembly |
| US7794402B2 (en) * | 2006-05-15 | 2010-09-14 | Advanced Cardiovascular Systems, Inc. | Echogenic needle catheter configured to produce an improved ultrasound image |
| AU2007254126A1 (en) * | 2006-05-19 | 2007-11-29 | Conmed Endoscopic Technologies, Inc. | Steerable medical instrument |
| US7464602B2 (en) * | 2006-06-30 | 2008-12-16 | Transoma Medical, Inc. | Pressure transmission catheter with sheath |
| US7732190B2 (en) * | 2006-07-31 | 2010-06-08 | Advanced Cardiovascular Systems, Inc. | Modified two-component gelation systems, methods of use and methods of manufacture |
| US9242005B1 (en) | 2006-08-21 | 2016-01-26 | Abbott Cardiovascular Systems Inc. | Pro-healing agent formulation compositions, methods and treatments |
| US20080097408A1 (en) * | 2006-10-20 | 2008-04-24 | Infraredx, Inc. | Pullback Carriage Interlock System and Method for Catheter System |
| US9005672B2 (en) | 2006-11-17 | 2015-04-14 | Abbott Cardiovascular Systems Inc. | Methods of modifying myocardial infarction expansion |
| US8741326B2 (en) * | 2006-11-17 | 2014-06-03 | Abbott Cardiovascular Systems Inc. | Modified two-component gelation systems, methods of use and methods of manufacture |
| US8890480B2 (en) * | 2006-11-30 | 2014-11-18 | The Boeing Company | Health management of rechargeable batteries |
| US8192760B2 (en) | 2006-12-04 | 2012-06-05 | Abbott Cardiovascular Systems Inc. | Methods and compositions for treating tissue using silk proteins |
| US20220096112A1 (en) | 2007-01-02 | 2022-03-31 | Aquabeam, Llc | Tissue resection with pressure sensing |
| US9232959B2 (en) | 2007-01-02 | 2016-01-12 | Aquabeam, Llc | Multi fluid tissue resection methods and devices |
| US8216209B2 (en) | 2007-05-31 | 2012-07-10 | Abbott Cardiovascular Systems Inc. | Method and apparatus for delivering an agent to a kidney |
| US9364586B2 (en) * | 2007-05-31 | 2016-06-14 | Abbott Cardiovascular Systems Inc. | Method and apparatus for improving delivery of an agent to a kidney |
| US9144509B2 (en) * | 2007-05-31 | 2015-09-29 | Abbott Cardiovascular Systems Inc. | Method and apparatus for delivering an agent to a kidney |
| US9149610B2 (en) | 2007-05-31 | 2015-10-06 | Abbott Cardiovascular Systems Inc. | Method and apparatus for improving delivery of an agent to a kidney |
| US9510885B2 (en) | 2007-11-16 | 2016-12-06 | Osseon Llc | Steerable and curvable cavity creation system |
| US20090131950A1 (en) * | 2007-11-16 | 2009-05-21 | Liu Y King | Vertebroplasty method with enhanced control |
| US20090131886A1 (en) | 2007-11-16 | 2009-05-21 | Liu Y King | Steerable vertebroplasty system |
| US20090299282A1 (en) * | 2007-11-16 | 2009-12-03 | Osseon Therapeutics, Inc. | Steerable vertebroplasty system with a plurality of cavity creation elements |
| US20090131867A1 (en) * | 2007-11-16 | 2009-05-21 | Liu Y King | Steerable vertebroplasty system with cavity creation element |
| US8100860B2 (en) * | 2007-12-06 | 2012-01-24 | Abbott Laboratories | Device and method for treating vulnerable plaque |
| WO2009073209A1 (en) * | 2007-12-06 | 2009-06-11 | Osseon Therapeutics, Inc. | Vertebroplasty implant with enhanced interfacial shear strength |
| US7942854B1 (en) | 2008-01-29 | 2011-05-17 | Abbott Cardiovascular Systems Inc. | Agent delivery catheter including an anchor and injection needle |
| ES2769535T3 (es) | 2008-03-06 | 2020-06-26 | Aquabeam Llc | Ablación de tejido y cauterización con energía óptica transportada en una corriente de fluido |
| EP2135634B1 (en) * | 2008-06-16 | 2011-10-19 | Greatbatch Ltd. | Bi-Directional Asymmetric Steerable Sheath |
| US8486022B2 (en) * | 2008-07-03 | 2013-07-16 | Abbott Cardiovascular Systems Inc. | Needle catheter with an angled distal tip lumen |
| US8170657B1 (en) * | 2008-08-13 | 2012-05-01 | Abbott Cadiovascular Systems Inc. | Delivery catheters for light activated agents |
| US9370306B1 (en) | 2008-08-13 | 2016-06-21 | Abbott Cardiovascular System Inc. | Methods and devices for in vivo targeted light therapy |
| US9358369B1 (en) * | 2008-08-13 | 2016-06-07 | Abbott Cardiovascular Systems Inc. | Reduced profile and enhanced flexibility delivery catheters for light activated agents |
| US9204925B2 (en) * | 2008-08-14 | 2015-12-08 | The Cleveland Clinic Foundation | Apparatus and method for treating a neuromuscular defect |
| US8652129B2 (en) | 2008-12-31 | 2014-02-18 | Medtronic Ardian Luxembourg S.A.R.L. | Apparatus, systems, and methods for achieving intravascular, thermally-induced renal neuromodulation |
| GB0906065D0 (en) * | 2009-04-07 | 2009-05-20 | Angiomed Ag | Delivery system for a prosthesis |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US20100280320A1 (en) * | 2009-04-29 | 2010-11-04 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US20100298832A1 (en) | 2009-05-20 | 2010-11-25 | Osseon Therapeutics, Inc. | Steerable curvable vertebroplasty drill |
| US8945060B2 (en) * | 2009-06-05 | 2015-02-03 | Cook Medical Technologies Llc | Access sheath and needle assembly for delivering therapeutic material |
| US9039676B2 (en) * | 2009-06-11 | 2015-05-26 | St. Jude Medical Puerto Rico Llc | Apparatus and methods for catheter steerability |
| US8439970B2 (en) | 2009-07-14 | 2013-05-14 | Edwards Lifesciences Corporation | Transapical delivery system for heart valves |
| WO2011044387A2 (en) | 2009-10-07 | 2011-04-14 | The Board Of Regents Of The University Of Texas System | Pressure-sensing medical devices, systems and methods, and methods of forming medical devices |
| US8376991B2 (en) | 2009-11-09 | 2013-02-19 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Device for reducing axial shortening of catheter or sheath due to repeated deflection |
| JP4679668B1 (ja) * | 2010-04-21 | 2011-04-27 | 日本ライフライン株式会社 | カテーテル |
| US9301690B2 (en) * | 2010-04-22 | 2016-04-05 | University Of Houston System | Device, system, and method for a stress sensing medical needle |
| US8870863B2 (en) | 2010-04-26 | 2014-10-28 | Medtronic Ardian Luxembourg S.A.R.L. | Catheter apparatuses, systems, and methods for renal neuromodulation |
| WO2011137377A1 (en) | 2010-04-29 | 2011-11-03 | Dfine, Inc. | System for use in treatment of vertebral fractures |
| US8440090B2 (en) * | 2010-04-29 | 2013-05-14 | Abbott Cardiovascular Systems Inc. | Apparatus and method of making a variable stiffness multilayer catheter tubing |
| US8696620B2 (en) | 2010-07-30 | 2014-04-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Catheter with a mechanism for omni-directional deflection of a catheter shaft |
| US9533119B2 (en) | 2010-08-13 | 2017-01-03 | Cathrx Ltd | Method of fabricating an electrical lead |
| US20120191107A1 (en) | 2010-09-17 | 2012-07-26 | Tanner Neal A | Systems and methods for positioning an elongate member inside a body |
| GB2483735A (en) * | 2010-09-19 | 2012-03-21 | Vital View Ltd Il Il | A sealed and bendable catheter |
| EP2635339B1 (en) * | 2010-11-03 | 2019-01-30 | Biocardia, Inc. | Steerable endoluminal devices |
| JP5989653B2 (ja) * | 2010-11-03 | 2016-09-07 | バイオカーディア, インコーポレイテッドBiocardia, Inc. | 操縦可能な導入シースシステム |
| US9226824B2 (en) | 2010-11-30 | 2016-01-05 | Edwards Lifesciences Corporation | Surgical stabilizer and closure system |
| US8857304B2 (en) | 2010-12-02 | 2014-10-14 | Biosense Webster (Israel), Ltd. | Magnetic resonance imaging compatible catheter |
| US20120209375A1 (en) | 2011-02-11 | 2012-08-16 | Gilbert Madrid | Stability device for use with percutaneous delivery systems |
| WO2012114334A1 (en) | 2011-02-24 | 2012-08-30 | Ilan Ben Oren | Hybrid catheter for endoluminal intervention |
| US9055937B2 (en) | 2011-04-01 | 2015-06-16 | Edwards Lifesciences Corporation | Apical puncture access and closure system |
| US9381082B2 (en) | 2011-04-22 | 2016-07-05 | Edwards Lifesciences Corporation | Devices, systems and methods for accurate positioning of a prosthetic valve |
| US20140107623A1 (en) * | 2012-09-11 | 2014-04-17 | Amr Salahieh | Steerable Delivery Sheaths |
| WO2012166467A1 (en) * | 2011-05-27 | 2012-12-06 | Stryker Corporation | Assembly for percutaneously inserting an implantable medical device, steering the device to a target location and deploying the device |
| US9138166B2 (en) | 2011-07-29 | 2015-09-22 | Hansen Medical, Inc. | Apparatus and methods for fiber integration and registration |
| CN103889348B (zh) * | 2011-08-25 | 2016-10-12 | 柯惠有限合伙公司 | 用于治疗腔组织的系统、装置和方法 |
| WO2013058962A1 (en) * | 2011-10-18 | 2013-04-25 | Boston Scientific Scimed, Inc. | Deflectable medical devices |
| US9993613B2 (en) | 2011-11-09 | 2018-06-12 | Boston Scientific Scimed, Inc. | Guide extension catheter |
| US20140135745A1 (en) | 2011-12-15 | 2014-05-15 | Imricor Medical Systems, Inc. | Mri compatible handle and steerable sheath |
| US9821143B2 (en) | 2011-12-15 | 2017-11-21 | Imricor Medical Systems, Inc. | Steerable sheath including elastomeric member |
| US9757538B2 (en) | 2011-12-15 | 2017-09-12 | Imricor Medical Systems, Inc. | MRI compatible control handle for steerable sheath with audible, tactile and/or visual means |
| US9504604B2 (en) | 2011-12-16 | 2016-11-29 | Auris Surgical Robotics, Inc. | Lithotripsy eye treatment |
| JP2015509030A (ja) | 2012-01-31 | 2015-03-26 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 延長型のガイドカテーテル |
| CN104203078B (zh) | 2012-02-29 | 2018-04-20 | 普罗赛普特生物机器人公司 | 自动化图像引导的组织切除和处理 |
| US20140100476A1 (en) * | 2012-10-04 | 2014-04-10 | Rafic Saleh | Surgical Instrument for Deep Tissue and/or Cell Sampling |
| US10383765B2 (en) | 2012-04-24 | 2019-08-20 | Auris Health, Inc. | Apparatus and method for a global coordinate system for use in robotic surgery |
| US8814825B2 (en) | 2012-05-07 | 2014-08-26 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Deflectable catheter shaft section, catheter incorporating same, and method of manufacturing same |
| US9861738B2 (en) * | 2012-05-07 | 2018-01-09 | St. Jude Medical, Cardiology Division, Inc. | Flex tip fluid lumen assembly with termination tube |
| US8986264B2 (en) | 2012-05-08 | 2015-03-24 | Greatbatch Ltd. | Transseptal needle apparatus |
| US9358039B2 (en) * | 2012-05-08 | 2016-06-07 | Greatbatch Ltd. | Transseptal needle apparatus |
| US8968356B2 (en) | 2012-08-06 | 2015-03-03 | Covidien Lp | Surgical device and handle assembly for use therewith |
| CN107280671B (zh) * | 2012-08-14 | 2020-04-17 | 直观外科手术操作公司 | 配置微创器械中的部件的系统和方法 |
| US9233225B2 (en) | 2012-11-10 | 2016-01-12 | Curvo Medical, Inc. | Coaxial bi-directional catheter |
| US9549666B2 (en) | 2012-11-10 | 2017-01-24 | Curvo Medical, Inc. | Coaxial micro-endoscope |
| EP3064244B1 (en) * | 2012-11-28 | 2020-10-28 | Auris Health, Inc. | Catheter having unirail pullwire architecture |
| US8894610B2 (en) | 2012-11-28 | 2014-11-25 | Hansen Medical, Inc. | Catheter having unirail pullwire architecture |
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| AU2013359395B2 (en) * | 2012-12-13 | 2016-07-21 | Imricor Medical Systems, Inc. | MRI compatible handle and steerable sheath |
| US10231867B2 (en) | 2013-01-18 | 2019-03-19 | Auris Health, Inc. | Method, apparatus and system for a water jet |
| US9867635B2 (en) | 2013-03-08 | 2018-01-16 | Auris Surgical Robotics, Inc. | Method, apparatus and system for a water jet |
| US10080576B2 (en) | 2013-03-08 | 2018-09-25 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US10076384B2 (en) | 2013-03-08 | 2018-09-18 | Symple Surgical, Inc. | Balloon catheter apparatus with microwave emitter |
| EP2777741A3 (en) * | 2013-03-12 | 2015-01-21 | St. Jude Medical, Cardiology Division, Inc. | Catheter system |
| US10149757B2 (en) | 2013-03-15 | 2018-12-11 | Edwards Lifesciences Corporation | System and method for transaortic delivery of a prosthetic heart valve |
| US10376672B2 (en) | 2013-03-15 | 2019-08-13 | Auris Health, Inc. | Catheter insertion system and method of fabrication |
| WO2014201165A1 (en) | 2013-06-11 | 2014-12-18 | Auris Surgical Robotics, Inc. | System for robotic assisted cataract surgery |
| CN104274868B (zh) * | 2013-07-11 | 2017-06-13 | 宁波市海曙思力德贸易有限公司 | 一种引流套件 |
| KR101613271B1 (ko) * | 2013-07-19 | 2016-04-18 | 주식회사 현주인테크 | 카테터 |
| US10426661B2 (en) | 2013-08-13 | 2019-10-01 | Auris Health, Inc. | Method and apparatus for laser assisted cataract surgery |
| US10071226B2 (en) | 2013-09-30 | 2018-09-11 | Biocardia, Inc. | Radial and trans-endocardial delivery catheter |
| CN105939647B (zh) | 2013-10-24 | 2020-01-21 | 奥瑞斯健康公司 | 机器人辅助腔内外科手术系统及相关方法 |
| US9993313B2 (en) | 2013-10-24 | 2018-06-12 | Auris Health, Inc. | Instrument device manipulator with roll mechanism |
| US20150126852A1 (en) * | 2013-11-01 | 2015-05-07 | Covidien Lp | Positioning catheter |
| EP3065806B1 (en) | 2013-12-24 | 2019-07-24 | St. Jude Medical, Cardiology Division, Inc. | Deflectable catheter bodies with corrugated structures |
| CN103706017B (zh) | 2013-12-27 | 2016-08-17 | 先健科技(深圳)有限公司 | 可调弯鞘管 |
| JP5682719B1 (ja) * | 2014-02-27 | 2015-03-11 | 住友ベークライト株式会社 | カテーテルおよびカテーテルの製造方法 |
| US10390943B2 (en) | 2014-03-17 | 2019-08-27 | Evalve, Inc. | Double orifice device for transcatheter mitral valve replacement |
| JP2015188569A (ja) * | 2014-03-28 | 2015-11-02 | 日本ライフライン株式会社 | 先端偏向操作可能カテーテル |
| US20170049516A1 (en) * | 2014-05-08 | 2017-02-23 | Eximo Medical Ltd | Methods for deflecting catheters |
| EP3134033B1 (en) | 2014-05-29 | 2018-04-04 | Edwards Lifesciences CardiAQ LLC | Prosthesis and delivery device |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| US9788910B2 (en) | 2014-07-01 | 2017-10-17 | Auris Surgical Robotics, Inc. | Instrument-mounted tension sensing mechanism for robotically-driven medical instruments |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US11273290B2 (en) * | 2014-09-10 | 2022-03-15 | Intuitive Surgical Operations, Inc. | Flexible instrument with nested conduits |
| US20170340284A1 (en) * | 2014-10-31 | 2017-11-30 | H. Lee Moffott Cancer Center And Research Institute, Inc. | Arterial catheters and methods of use |
| CR20170245A (es) * | 2014-12-05 | 2017-09-14 | Edwards Lifesciences Corp | Cateter dirigible con cable de tracción |
| JP6600468B2 (ja) * | 2015-02-24 | 2019-10-30 | 日本ライフライン株式会社 | カテーテル |
| US11013888B2 (en) * | 2015-07-13 | 2021-05-25 | Cook Regentee LLC | Catheters and systems useful for delivery of material to the lung |
| WO2017024289A1 (en) * | 2015-08-05 | 2017-02-09 | Clph, Llc | Catheter devices and methods for making them |
| US9931487B2 (en) | 2015-08-06 | 2018-04-03 | Boston Scientific Scimed, Inc. | Bidirectional steering control apparatus for a catheter |
| US10492857B2 (en) | 2015-08-06 | 2019-12-03 | Boston Scientific Scimed Inc | Deployment control apparatus for a catheter with a deployable array |
| CN113229942A (zh) | 2015-09-09 | 2021-08-10 | 奥瑞斯健康公司 | 手术器械装置操纵器 |
| US10583270B2 (en) | 2016-03-14 | 2020-03-10 | Covidien Lp | Compound curve navigation catheter |
| CN109414292A (zh) | 2016-05-05 | 2019-03-01 | 爱克斯莫医疗有限公司 | 用于切除和/或消融不需要的组织的装置和方法 |
| CN109562244A (zh) | 2016-07-28 | 2019-04-02 | 库克医学技术有限责任公司 | 可操控导管中的远侧线固定 |
| US10463439B2 (en) | 2016-08-26 | 2019-11-05 | Auris Health, Inc. | Steerable catheter with shaft load distributions |
| US10123786B2 (en) | 2016-09-16 | 2018-11-13 | Krishna Rocha-Singh, M.D. | Bone marrow harvesting device |
| WO2018075700A1 (en) | 2016-10-18 | 2018-04-26 | Boston Scientific Scimed, Inc. | Guide extension catheter |
| JP2019534130A (ja) | 2016-10-27 | 2019-11-28 | ディーファイン,インコーポレイティド | セメント送達チャネルを有する関節接合型骨刀 |
| US10363138B2 (en) | 2016-11-09 | 2019-07-30 | Evalve, Inc. | Devices for adjusting the curvature of cardiac valve structures |
| US10426616B2 (en) * | 2016-11-17 | 2019-10-01 | Evalve, Inc. | Cardiac implant delivery system |
| US11026744B2 (en) | 2016-11-28 | 2021-06-08 | Dfine, Inc. | Tumor ablation devices and related methods |
| WO2018107036A1 (en) | 2016-12-09 | 2018-06-14 | Dfine, Inc. | Medical devices for treating hard tissues and related methods |
| WO2018129180A1 (en) | 2017-01-06 | 2018-07-12 | Dfine, Inc. | Osteotome with a distal portion for simultaneous advancement and articulation |
| US10888309B2 (en) * | 2017-01-31 | 2021-01-12 | Covidien Lp | Surgical fastener devices with geometric tubes |
| CN110769736B (zh) | 2017-05-17 | 2023-01-13 | 奥瑞斯健康公司 | 可更换工作通道 |
| JP6996873B2 (ja) * | 2017-06-13 | 2022-01-17 | Sbカワスミ株式会社 | 医療用デバイス |
| CN110996854B (zh) * | 2017-07-06 | 2022-12-16 | 爱德华兹生命科学公司 | 可操纵递送系统和部件 |
| JP7246375B2 (ja) * | 2017-08-22 | 2023-03-27 | コーニンクレッカ フィリップス エヌ ヴェ | 調整可能可撓性/剛性腔内装置 |
| WO2019075354A1 (en) * | 2017-10-12 | 2019-04-18 | Vimal Nanavati | MULTI-LIGHT CATHETER FOR DEPLOYING CARDIAC DEVICE |
| US11723738B2 (en) * | 2017-11-06 | 2023-08-15 | University Of Tennessee Research Foundation | Surgical device tip with deflectable joint |
| IL313084A (en) * | 2017-12-12 | 2024-07-01 | Rapid Medical Ltd | A mechanism for operating a leading wire and a mechanism for front operation |
| EP3731722A4 (en) * | 2018-01-10 | 2022-02-09 | AtriCure, Inc. | DEVICE AND ACCESSORIES FOR PERCUTANEOUS ENDOSCOPIC ACCESS AND ABLATION SYSTEMS |
| EP3773135B1 (en) | 2018-03-28 | 2024-02-14 | Auris Health, Inc. | Medical instruments with variable bending stiffness profiles |
| US10898276B2 (en) | 2018-08-07 | 2021-01-26 | Auris Health, Inc. | Combining strain-based shape sensing with catheter control |
| US11497889B2 (en) * | 2018-08-23 | 2022-11-15 | Nuvera Medical, Inc. | Medical tool positioning devices, systems, and methods of use and manufacture |
| WO2020068853A2 (en) | 2018-09-26 | 2020-04-02 | Auris Health, Inc. | Articulating medical instruments |
| US11937864B2 (en) | 2018-11-08 | 2024-03-26 | Dfine, Inc. | Ablation systems with parameter-based modulation and related devices and methods |
| US11116942B2 (en) | 2018-12-28 | 2021-09-14 | Biosense Webster (Israel) Ltd. | Medical device shaft with reduced whipping |
| US11986257B2 (en) | 2018-12-28 | 2024-05-21 | Auris Health, Inc. | Medical instrument with articulable segment |
| EP3695871B1 (en) * | 2019-02-18 | 2024-04-10 | Creganna Unlimited Company | Shaft for a catheter and fabrication method |
| US11617627B2 (en) | 2019-03-29 | 2023-04-04 | Auris Health, Inc. | Systems and methods for optical strain sensing in medical instruments |
| CA3142704A1 (en) * | 2019-06-03 | 2020-12-10 | University Of Miami | Steerable guide for minimally invasive surgery |
| CN114206424A (zh) * | 2019-06-06 | 2022-03-18 | 普罗美迪卡健康系统公司 | 导管装置 |
| US11717147B2 (en) | 2019-08-15 | 2023-08-08 | Auris Health, Inc. | Medical device having multiple bending sections |
| WO2021055617A1 (en) | 2019-09-18 | 2021-03-25 | Merit Medical Systems, Inc. | Osteotome with inflatable portion and multiwire articulation |
| US11471650B2 (en) | 2019-09-20 | 2022-10-18 | Biosense Webster (Israel) Ltd. | Mechanism for manipulating a puller wire |
| EP4084717A4 (en) | 2019-12-31 | 2024-02-14 | Auris Health, Inc. | DYNAMIC PULLEY SYSTEM |
| JP7455595B2 (ja) * | 2020-01-28 | 2024-03-26 | 朝日インテック株式会社 | カテーテル |
| BR112022016280A2 (pt) * | 2020-02-18 | 2022-10-04 | East End Medical Llc | Sistema de cateter com ponta de balão multidirecional para conduzir detecção e estimulação de feixe de his |
| CA3183162A1 (en) | 2020-06-19 | 2021-12-23 | Jake Anthony Sganga | Systems and methods for guidance of intraluminal devices within the vasculature |
| GB2601291A (en) * | 2020-10-13 | 2022-06-01 | Pacertool As | A catheter and method for detecting dyssynergy resulting from dyssynchrony |
| US20220126060A1 (en) * | 2020-10-23 | 2022-04-28 | Canon U.S.A., Inc. | Reinforced center lumen for steerable device |
| WO2022098932A1 (en) | 2020-11-09 | 2022-05-12 | Agile Devices, Inc. | Devices for steering catheters |
| US11707332B2 (en) | 2021-07-01 | 2023-07-25 | Remedy Robotics, Inc. | Image space control for endovascular tools |
| CA3222522A1 (en) | 2021-07-01 | 2023-01-05 | David James Bell | Vision-based position and orientation determination for endovascular tools |
| US12038322B2 (en) | 2022-06-21 | 2024-07-16 | Eximo Medical Ltd. | Devices and methods for testing ablation systems |
| CN117224825B (zh) * | 2023-09-04 | 2024-06-21 | 中国人民解放军空军军医大学 | 一种结肠放置的肠菌移植给药设备 |
Family Cites Families (241)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US103533A (en) * | 1870-05-24 | Improvement in cutters for cutting the bodies of fruit-baskets | ||
| US87169A (en) * | 1869-02-23 | Improved bitters | ||
| US87173A (en) * | 1869-02-23 | Improved animal-trap | ||
| US103532A (en) * | 1870-05-24 | Improvement in machines for bottoming fruit-baskets | ||
| US77647A (en) * | 1868-05-05 | James m | ||
| US3986A (en) * | 1845-04-01 | Alexander mitchell | ||
| US10486A (en) * | 1854-01-31 | Steam-hammer | ||
| US161330A (en) * | 1875-03-30 | Improvement in pyrometers | ||
| US16628A (en) * | 1857-02-10 | Edwin p | ||
| US3177543A (en) * | 1962-11-14 | 1965-04-13 | Cecil D Fountain | Safety locking device |
| US3716058A (en) * | 1970-07-17 | 1973-02-13 | Atlanta Res Inst | Barbed suture |
| US4128100A (en) | 1976-10-08 | 1978-12-05 | Wendorff Erwin R | Suture |
| GB2108250B (en) * | 1981-10-19 | 1985-01-09 | Bhf Eng Ltd | Forehearths |
| US4781186A (en) | 1984-05-30 | 1988-11-01 | Devices For Vascular Intervention, Inc. | Atherectomy device having a flexible housing |
| US5040548A (en) | 1989-06-01 | 1991-08-20 | Yock Paul G | Angioplasty mehtod |
| US5061273A (en) | 1989-06-01 | 1991-10-29 | Yock Paul G | Angioplasty apparatus facilitating rapid exchanges |
| US5350395A (en) | 1986-04-15 | 1994-09-27 | Yock Paul G | Angioplasty apparatus facilitating rapid exchanges |
| US4719924A (en) * | 1986-09-09 | 1988-01-19 | C. R. Bard, Inc. | Small diameter steerable guidewire with adjustable tip |
| JPH053053Y2 (ja) | 1987-01-23 | 1993-01-26 | ||
| US4814250A (en) * | 1987-03-17 | 1989-03-21 | Eastman Kodak Company | Electrophotographic toner and developer compositions containing dioctylsulfosuccinate and sodium benzoate charge control agents |
| US5100418A (en) * | 1987-05-14 | 1992-03-31 | Inbae Yoon | Suture tie device system and applicator therefor |
| US4920980A (en) * | 1987-09-14 | 1990-05-01 | Cordis Corporation | Catheter with controllable tip |
| US4830023A (en) * | 1987-11-27 | 1989-05-16 | Medi-Tech, Incorporated | Medical guidewire |
| US4886067A (en) | 1989-01-03 | 1989-12-12 | C. R. Bard, Inc. | Steerable guidewire with soft adjustable tip |
| US5431673A (en) * | 1989-02-17 | 1995-07-11 | American Biomed, Inc. | Distal atherectomy catheter |
| US4994067A (en) * | 1989-02-17 | 1991-02-19 | American Biomed, Inc. | Distal atherectomy catheter |
| US5728129A (en) * | 1989-02-17 | 1998-03-17 | American Biomed, Inc. | Distal atherectomy catheter |
| US4927421A (en) * | 1989-05-15 | 1990-05-22 | Marlowe Goble E | Process of endosteal fixation of a ligament |
| US5129906A (en) | 1989-09-08 | 1992-07-14 | Linvatec Corporation | Bioabsorbable tack for joining bodily tissue and in vivo method and apparatus for deploying same |
| US5226909A (en) | 1989-09-12 | 1993-07-13 | Devices For Vascular Intervention, Inc. | Atherectomy device having helical blade and blade guide |
| US5254088A (en) * | 1990-02-02 | 1993-10-19 | Ep Technologies, Inc. | Catheter steering mechanism |
| US5129902A (en) * | 1990-04-20 | 1992-07-14 | Marlowe Goble E | Endosteal ligament retainer and process |
| US5171233A (en) | 1990-04-25 | 1992-12-15 | Microvena Corporation | Snare-type probe |
| US6117176A (en) | 1993-11-15 | 2000-09-12 | Applied Elastomerics, Inc. | Elastic-crystal gel |
| US5102421A (en) * | 1990-06-14 | 1992-04-07 | Wm. E. Anpach, III | Suture anchor and method of forming |
| US5100421A (en) * | 1991-02-05 | 1992-03-31 | Cyprus Endosurgical Tools, Inc. | Christoudias curved needle suture assembly |
| US5116337A (en) * | 1991-06-27 | 1992-05-26 | Johnson Lanny L | Fixation screw and method for ligament reconstruction |
| US5571215A (en) | 1993-02-22 | 1996-11-05 | Heartport, Inc. | Devices and methods for intracardiac procedures |
| US5234443A (en) | 1991-07-26 | 1993-08-10 | The Regents Of The University Of California | Endoscopic knot tying apparatus and methods |
| US5201598A (en) * | 1991-07-31 | 1993-04-13 | Tehan Frank V | Attachment of cord to tube end using locking sleeve to permit easy cord replacement |
| US5141520A (en) | 1991-10-29 | 1992-08-25 | Marlowe Goble E | Harpoon suture anchor |
| US5242456A (en) | 1991-11-21 | 1993-09-07 | Kensey Nash Corporation | Apparatus and methods for clamping tissue and reflecting the same |
| US6001104A (en) | 1991-12-03 | 1999-12-14 | Boston Scientific Technology, Inc. | Bone anchor implantation device |
| US5423882A (en) * | 1991-12-26 | 1995-06-13 | Cordis-Webster, Inc. | Catheter having electrode with annular recess and method of using same |
| US5156616A (en) | 1992-02-10 | 1992-10-20 | Meadows Bruce F | Apparatus and method for suture attachment |
| US5327905A (en) * | 1992-02-14 | 1994-07-12 | Boaz Avitall | Biplanar deflectable catheter for arrhythmogenic tissue ablation |
| JP3231080B2 (ja) * | 1992-06-03 | 2001-11-19 | テルモ株式会社 | カテーテルチューブ |
| CA2437777C (en) | 1992-09-21 | 2006-11-28 | United States Surgical Corporation | Device for applying a meniscal staple |
| US5441483A (en) | 1992-11-16 | 1995-08-15 | Avitall; Boaz | Catheter deflection control |
| US6283127B1 (en) | 1992-12-03 | 2001-09-04 | Wesley D. Sterman | Devices and methods for intracardiac procedures |
| US5518162A (en) * | 1992-12-11 | 1996-05-21 | Avery Dennison Corporation | Fastener attaching tool |
| US5383260A (en) * | 1992-12-11 | 1995-01-24 | Avery Dennison Corporation | Fastener clip including one or more fasteners adapted for attaching buttons to a garment or like material |
| US5495974A (en) | 1992-12-11 | 1996-03-05 | Avery Dennison Corporation | Fastener attaching tool |
| US6161543A (en) | 1993-02-22 | 2000-12-19 | Epicor, Inc. | Methods of epicardial ablation for creating a lesion around the pulmonary veins |
| US5713951A (en) | 1993-02-22 | 1998-02-03 | Heartport, Inc. | Thoracoscopic valve prosthesis delivery device |
| US5613937A (en) * | 1993-02-22 | 1997-03-25 | Heartport, Inc. | Method of retracting heart tissue in closed-chest heart surgery using endo-scopic retraction |
| US5374275A (en) | 1993-03-25 | 1994-12-20 | Synvasive Technology, Inc. | Surgical suturing device and method of use |
| US5456667A (en) * | 1993-05-20 | 1995-10-10 | Advanced Cardiovascular Systems, Inc. | Temporary stenting catheter with one-piece expandable segment |
| US5370662A (en) | 1993-06-23 | 1994-12-06 | Kevin R. Stone | Suture anchor assembly |
| DE4323585A1 (de) * | 1993-07-14 | 1995-01-19 | Delma Elektro Med App | Bipolares Hochfrequenz-Chirurgieinstrument |
| US5487757A (en) * | 1993-07-20 | 1996-01-30 | Medtronic Cardiorhythm | Multicurve deflectable catheter |
| AU7404994A (en) * | 1993-07-30 | 1995-02-28 | Regents Of The University Of California, The | Endocardial infusion catheter |
| US5562619A (en) * | 1993-08-19 | 1996-10-08 | Boston Scientific Corporation | Deflectable catheter |
| US5713950A (en) | 1993-11-01 | 1998-02-03 | Cox; James L. | Method of replacing heart valves using flexible tubes |
| US5640955A (en) * | 1995-02-14 | 1997-06-24 | Daig Corporation | Guiding introducers for use in the treatment of accessory pathways around the mitral valve using a retrograde approach |
| US6203531B1 (en) * | 1993-11-03 | 2001-03-20 | Daig Corporation | Guiding introducers for use in the treatment of accessory pathways around the mitral valve using a retrograde approach |
| US5527322A (en) * | 1993-11-08 | 1996-06-18 | Perclose, Inc. | Device and method for suturing of internal puncture sites |
| US5487385A (en) | 1993-12-03 | 1996-01-30 | Avitall; Boaz | Atrial mapping and ablation catheter system |
| US5358479A (en) | 1993-12-06 | 1994-10-25 | Electro-Catheter Corporation | Multiform twistable tip deflectable catheter |
| US5617854A (en) * | 1994-06-22 | 1997-04-08 | Munsif; Anand | Shaped catheter device and method |
| US6056744A (en) * | 1994-06-24 | 2000-05-02 | Conway Stuart Medical, Inc. | Sphincter treatment apparatus |
| US5554184A (en) | 1994-07-27 | 1996-09-10 | Machiraju; Venkat R. | Heart valve |
| US5582616A (en) | 1994-08-05 | 1996-12-10 | Origin Medsystems, Inc. | Surgical helical fastener with applicator |
| JPH08196538A (ja) | 1994-09-26 | 1996-08-06 | Ethicon Inc | エラストマー部材を有する外科用の組織付着器具および該組織へ外科用のメッシュを張り付ける方法 |
| US5632754A (en) * | 1994-12-23 | 1997-05-27 | Devices For Vascular Intervention | Universal catheter with interchangeable work element |
| US5609598A (en) | 1994-12-30 | 1997-03-11 | Vnus Medical Technologies, Inc. | Method and apparatus for minimally invasive treatment of chronic venous insufficiency |
| US5591197A (en) | 1995-03-14 | 1997-01-07 | Advanced Cardiovascular Systems, Inc. | Expandable stent forming projecting barbs and method for deploying |
| US5681280A (en) | 1995-05-02 | 1997-10-28 | Heart Rhythm Technologies, Inc. | Catheter control system |
| US5626613A (en) * | 1995-05-04 | 1997-05-06 | Arthrex, Inc. | Corkscrew suture anchor and driver |
| US6176240B1 (en) * | 1995-06-07 | 2001-01-23 | Conceptus, Inc. | Contraceptive transcervical fallopian tube occlusion devices and their delivery |
| EP0836499A1 (en) * | 1995-06-07 | 1998-04-22 | Cardima, Inc. | Guiding catheter for coronary sinus |
| KR19990064209A (ko) * | 1995-10-13 | 1999-07-26 | 트랜스바스큘라, 인코포레이티드 | 간질성 경혈관 개입을 위한 장치, 시스템 및 방법 |
| US5588188A (en) | 1995-11-20 | 1996-12-31 | The United States Of America As Represented By The Secretary Of The Navy | Swaged cable swivel hook assembly and swivel hook therefor |
| US5823955A (en) | 1995-11-20 | 1998-10-20 | Medtronic Cardiorhythm | Atrioventricular valve tissue ablation catheter and method |
| US6182664B1 (en) * | 1996-02-19 | 2001-02-06 | Edwards Lifesciences Corporation | Minimally invasive cardiac valve surgery procedure |
| US6402780B2 (en) | 1996-02-23 | 2002-06-11 | Cardiovascular Technologies, L.L.C. | Means and method of replacing a heart valve in a minimally invasive manner |
| WO1998007375A1 (en) | 1996-08-22 | 1998-02-26 | The Trustees Of Columbia University | Endovascular flexible stapling device |
| US6120520A (en) | 1997-05-27 | 2000-09-19 | Angiotrax, Inc. | Apparatus and methods for stimulating revascularization and/or tissue growth |
| US6051008A (en) * | 1996-12-02 | 2000-04-18 | Angiotrax, Inc. | Apparatus having stabilization members for percutaneously performing surgery and methods of use |
| US5782828A (en) * | 1996-12-11 | 1998-07-21 | Irvine Biomedical, Inc. | Ablation catheter with multiple flexible curves |
| US7073504B2 (en) | 1996-12-18 | 2006-07-11 | Ams Research Corporation | Contraceptive system and method of use |
| US5961440A (en) | 1997-01-02 | 1999-10-05 | Myocor, Inc. | Heart wall tension reduction apparatus and method |
| US6183411B1 (en) * | 1998-09-21 | 2001-02-06 | Myocor, Inc. | External stress reduction device and method |
| US6045497A (en) | 1997-01-02 | 2000-04-04 | Myocor, Inc. | Heart wall tension reduction apparatus and method |
| US6050936A (en) | 1997-01-02 | 2000-04-18 | Myocor, Inc. | Heart wall tension reduction apparatus |
| US6077214A (en) | 1998-07-29 | 2000-06-20 | Myocor, Inc. | Stress reduction apparatus and method |
| US5916213A (en) * | 1997-02-04 | 1999-06-29 | Medtronic, Inc. | Systems and methods for tissue mapping and ablation |
| US5989284A (en) | 1997-02-18 | 1999-11-23 | Hearten Medical, Inc. | Method and device for soft tissue modification |
| US6090096A (en) * | 1997-04-23 | 2000-07-18 | Heartport, Inc. | Antegrade cardioplegia catheter and method |
| US6017358A (en) * | 1997-05-01 | 2000-01-25 | Inbae Yoon | Surgical instrument with multiple rotatably mounted offset end effectors |
| US6004332A (en) | 1997-05-01 | 1999-12-21 | Yoon; Inbae | Suturing instrument with multiple rotatably mounted offset needle holders and method of using the same |
| US5782900A (en) | 1997-06-23 | 1998-07-21 | Irvine Biomedical, Inc. | Catheter system having safety means |
| EP0930845B1 (en) | 1997-06-27 | 2009-10-14 | The Trustees Of Columbia University In The City Of New York | Apparatus for circulatory valve repair |
| US6164283A (en) | 1997-07-08 | 2000-12-26 | The Regents Of The University Of California | Device and method for forming a circumferential conduction block in a pulmonary vein |
| US5954731A (en) | 1997-07-29 | 1999-09-21 | Yoon; Inbae | Surgical instrument with multiple rotatably mounted spreadable end effectors |
| US6123699A (en) | 1997-09-05 | 2000-09-26 | Cordis Webster, Inc. | Omni-directional steerable catheter |
| FR2768324B1 (fr) | 1997-09-12 | 1999-12-10 | Jacques Seguin | Instrument chirurgical permettant, par voie percutanee, de fixer l'une a l'autre deux zones de tissu mou, normalement mutuellement distantes |
| US6554794B1 (en) * | 1997-09-24 | 2003-04-29 | Richard L. Mueller | Non-deforming deflectable multi-lumen catheter |
| US6149669A (en) | 1997-10-30 | 2000-11-21 | Li Medical Technologies, Inc. | Surgical fastener assembly method of use |
| US6332893B1 (en) | 1997-12-17 | 2001-12-25 | Myocor, Inc. | Valve to myocardium tension members device and method |
| US6027514A (en) * | 1997-12-17 | 2000-02-22 | Fox Hollow Technologies, Inc. | Apparatus and method for removing occluding material from body lumens |
| US6200315B1 (en) * | 1997-12-18 | 2001-03-13 | Medtronic, Inc. | Left atrium ablation catheter |
| US7214230B2 (en) | 1998-02-24 | 2007-05-08 | Hansen Medical, Inc. | Flexible instrument |
| US6190408B1 (en) | 1998-03-05 | 2001-02-20 | The University Of Cincinnati | Device and method for restructuring the heart chamber geometry |
| JP4231568B2 (ja) * | 1998-03-20 | 2009-03-04 | オリンパス株式会社 | 管状挿入具 |
| US6656215B1 (en) * | 2000-11-16 | 2003-12-02 | Cordis Corporation | Stent graft having an improved means for attaching a stent to a graft |
| US6001127A (en) | 1998-03-31 | 1999-12-14 | St. Jude Medical, Inc. | Annuloplasty ring holder |
| US6110100A (en) | 1998-04-22 | 2000-08-29 | Scimed Life Systems, Inc. | System for stress relieving the heart muscle and for controlling heart function |
| NL1009028C2 (nl) * | 1998-04-28 | 1999-10-29 | Adri Marinus Blomme | Hechtmiddelen voor het verbinden van een buisvormige vaatprothese met een bloedvat in het lichaam alsmede aftakkingsmiddelen, een vaatprothese, een inrichting voor het in het lichaam inbrengen en aanhechten van een vaatprothese en een vaatprothesesysteem. |
| US6113609A (en) | 1998-05-26 | 2000-09-05 | Scimed Life Systems, Inc. | Implantable tissue fastener and system for treating gastroesophageal reflux disease |
| US6165164A (en) | 1999-03-29 | 2000-12-26 | Cordis Corporation | Catheter for injecting therapeutic and diagnostic agents |
| US6493575B1 (en) | 1998-06-04 | 2002-12-10 | Randy J. Kesten | Fluoroscopic tracking enhanced intraventricular catheter system |
| US6905476B2 (en) * | 1998-06-04 | 2005-06-14 | Biosense Webster, Inc. | Catheter with injection needle |
| US6599311B1 (en) | 1998-06-05 | 2003-07-29 | Broncus Technologies, Inc. | Method and assembly for lung volume reduction |
| US6174323B1 (en) * | 1998-06-05 | 2001-01-16 | Broncus Technologies, Inc. | Method and assembly for lung volume reduction |
| US6283962B1 (en) | 1998-06-08 | 2001-09-04 | Quantum Therapeutics Corp. | Device for valvular annulus treatment and methods thereof |
| US7569062B1 (en) | 1998-07-15 | 2009-08-04 | St. Jude Medical, Inc. | Mitral and tricuspid valve repair |
| US6165183A (en) | 1998-07-15 | 2000-12-26 | St. Jude Medical, Inc. | Mitral and tricuspid valve repair |
| US6260552B1 (en) | 1998-07-29 | 2001-07-17 | Myocor, Inc. | Transventricular implant tools and devices |
| US6093199A (en) * | 1998-08-05 | 2000-07-25 | Endovascular Technologies, Inc. | Intra-luminal device for treatment of body cavities and lumens and method of use |
| US6102887A (en) * | 1998-08-11 | 2000-08-15 | Biocardia, Inc. | Catheter drug delivery system and method for use |
| US6198974B1 (en) * | 1998-08-14 | 2001-03-06 | Cordis Webster, Inc. | Bi-directional steerable catheter |
| US6267781B1 (en) | 1998-08-31 | 2001-07-31 | Quantum Therapeutics Corp. | Medical device and methods for treating valvular annulus |
| US6648903B1 (en) | 1998-09-08 | 2003-11-18 | Pierson, Iii Raymond H. | Medical tensioning system |
| US6355030B1 (en) | 1998-09-25 | 2002-03-12 | Cardiothoracic Systems, Inc. | Instruments and methods employing thermal energy for the repair and replacement of cardiac valves |
| US6178346B1 (en) * | 1998-10-23 | 2001-01-23 | David C. Amundson | Infrared endoscopic imaging in a liquid with suspended particles: method and apparatus |
| US6210407B1 (en) * | 1998-12-03 | 2001-04-03 | Cordis Webster, Inc. | Bi-directional electrode catheter |
| US6374476B1 (en) * | 1999-03-03 | 2002-04-23 | Codris Webster, Inc. | Method for making a catheter tip section |
| US20040044350A1 (en) | 1999-04-09 | 2004-03-04 | Evalve, Inc. | Steerable access sheath and methods of use |
| DE60045096D1 (de) | 1999-04-09 | 2010-11-25 | Evalve Inc | Verfahren und vorrichtung zur herzklappenreperation |
| US7226467B2 (en) | 1999-04-09 | 2007-06-05 | Evalve, Inc. | Fixation device delivery catheter, systems and methods of use |
| US6752813B2 (en) | 1999-04-09 | 2004-06-22 | Evalve, Inc. | Methods and devices for capturing and fixing leaflets in valve repair |
| US6273911B1 (en) * | 1999-04-22 | 2001-08-14 | Advanced Cardiovascular Systems, Inc. | Variable strength stent |
| US6190410B1 (en) * | 1999-04-29 | 2001-02-20 | Bausch & Lomb Surgical, Inc. | Intraocular lenses |
| US6187040B1 (en) * | 1999-05-03 | 2001-02-13 | John T. M. Wright | Mitral and tricuspid annuloplasty rings |
| US6488689B1 (en) | 1999-05-20 | 2002-12-03 | Aaron V. Kaplan | Methods and apparatus for transpericardial left atrial appendage closure |
| DE60044531D1 (de) | 1999-06-25 | 2010-07-22 | Vahid Saadat | Gerät zur gewebebehandlung |
| US6626899B2 (en) | 1999-06-25 | 2003-09-30 | Nidus Medical, Llc | Apparatus and methods for treating tissue |
| SE514718C2 (sv) | 1999-06-29 | 2001-04-09 | Jan Otto Solem | Anordning för behandling av bristande tillslutningsförmåga hos mitralisklaffapparaten |
| US6997951B2 (en) * | 1999-06-30 | 2006-02-14 | Edwards Lifesciences Ag | Method and device for treatment of mitral insufficiency |
| US7192442B2 (en) | 1999-06-30 | 2007-03-20 | Edwards Lifesciences Ag | Method and device for treatment of mitral insufficiency |
| US6423073B2 (en) | 1999-07-23 | 2002-07-23 | Ethicon, Inc. | Instrument for inserting graft fixation device |
| US6497707B1 (en) | 1999-07-23 | 2002-12-24 | Ethicon, Inc. | Graft fixation device combination |
| US6254568B1 (en) * | 1999-08-10 | 2001-07-03 | Biosense Webster, Inc. | Deflectable catheter with straightening element |
| US6447525B2 (en) | 1999-08-19 | 2002-09-10 | Fox Hollow Technologies, Inc. | Apparatus and methods for removing material from a body lumen |
| US6299622B1 (en) | 1999-08-19 | 2001-10-09 | Fox Hollow Technologies, Inc. | Atherectomy catheter with aligned imager |
| US6554852B1 (en) * | 1999-08-25 | 2003-04-29 | Michael A. Oberlander | Multi-anchor suture |
| US6231561B1 (en) * | 1999-09-20 | 2001-05-15 | Appriva Medical, Inc. | Method and apparatus for closing a body lumen |
| US6306133B1 (en) | 1999-10-02 | 2001-10-23 | Quantum Cor Incorporated | Ablation catheter system and methods for repairing a valvular annulus |
| US6312447B1 (en) | 1999-10-13 | 2001-11-06 | The General Hospital Corporation | Devices and methods for percutaneous mitral valve repair |
| WO2001028455A1 (en) | 1999-10-21 | 2001-04-26 | Myocor, Inc. | Methods and devices for improving cardiac function in hearts |
| US6626930B1 (en) | 1999-10-21 | 2003-09-30 | Edwards Lifesciences Corporation | Minimally invasive mitral valve repair method and apparatus |
| US6325823B1 (en) | 1999-10-29 | 2001-12-04 | Revasc Corporation | Endovascular prosthesis accommodating torsional and longitudinal displacements and methods of use |
| US6458153B1 (en) | 1999-12-31 | 2002-10-01 | Abps Venture One, Ltd. | Endoluminal cardiac and venous valve prostheses and methods of manufacture and delivery thereof |
| US6254593B1 (en) * | 1999-12-10 | 2001-07-03 | Advanced Cardiovascular Systems, Inc. | Bifurcated stent delivery system having retractable sheath |
| US6402781B1 (en) * | 2000-01-31 | 2002-06-11 | Mitralife | Percutaneous mitral annuloplasty and cardiac reinforcement |
| US7296577B2 (en) | 2000-01-31 | 2007-11-20 | Edwards Lifescience Ag | Transluminal mitral annuloplasty with active anchoring |
| US6989028B2 (en) * | 2000-01-31 | 2006-01-24 | Edwards Lifesciences Ag | Medical system and method for remodeling an extravascular tissue structure |
| US6770070B1 (en) * | 2000-03-17 | 2004-08-03 | Rita Medical Systems, Inc. | Lung treatment apparatus and method |
| US6537198B1 (en) * | 2000-03-21 | 2003-03-25 | Myocor, Inc. | Splint assembly for improving cardiac function in hearts, and method for implanting the splint assembly |
| US6733500B2 (en) * | 2000-03-31 | 2004-05-11 | Medtronic, Inc. | Method and system for delivering a medical electrical lead within a venous system |
| US7083628B2 (en) | 2002-09-03 | 2006-08-01 | Edwards Lifesciences Corporation | Single catheter mitral valve repair device and method for use |
| US6743239B1 (en) | 2000-05-25 | 2004-06-01 | St. Jude Medical, Inc. | Devices with a bendable tip for medical procedures |
| DE10029580C1 (de) | 2000-06-15 | 2002-01-10 | Ferton Holding Sa | Vorrichtung zum Entfernen von Körpersteinen mit einem intrakorporalen Lithotripter |
| AU2001271411A1 (en) | 2000-06-23 | 2002-01-08 | Viacor Incorporated | Automated annular plication for mitral valve repair |
| EP1401358B1 (en) | 2000-06-30 | 2016-08-17 | Medtronic, Inc. | Apparatus for performing a procedure on a cardiac valve |
| US6419696B1 (en) | 2000-07-06 | 2002-07-16 | Paul A. Spence | Annuloplasty devices and related heart valve repair methods |
| US6408214B1 (en) * | 2000-07-11 | 2002-06-18 | Medtronic, Inc. | Deflectable tip catheter for CS pacing |
| EP1301228B1 (en) | 2000-07-13 | 2008-07-23 | Abbott Cardiovascular Systems Inc. | Deployment system for myocardial cellular material |
| SE0002878D0 (sv) | 2000-08-11 | 2000-08-11 | Kimblad Ola | Device and method for treatment of atrioventricular regurgitation |
| US6709442B2 (en) | 2000-09-01 | 2004-03-23 | Onux Medical, Inc. | Vascular bypass grafting instrument and method |
| US8956407B2 (en) * | 2000-09-20 | 2015-02-17 | Mvrx, Inc. | Methods for reshaping a heart valve annulus using a tensioning implant |
| US7381220B2 (en) | 2000-09-20 | 2008-06-03 | Ample Medical, Inc. | Devices, systems, and methods for supplementing, repairing, or replacing a native heart valve leaflet |
| US6602288B1 (en) | 2000-10-05 | 2003-08-05 | Edwards Lifesciences Corporation | Minimally-invasive annuloplasty repair segment delivery template, system and method of use |
| US6723038B1 (en) * | 2000-10-06 | 2004-04-20 | Myocor, Inc. | Methods and devices for improving mitral valve function |
| US6638289B1 (en) | 2000-10-16 | 2003-10-28 | Stryker Corporation | Elongated endoscopic cutting accessories |
| US6638286B1 (en) | 2000-11-16 | 2003-10-28 | Vascular Control Systems, Inc. | Doppler directed suture ligation device and method |
| EP1337200A2 (en) | 2000-11-17 | 2003-08-27 | Evysio Medical Devices Ulc | Endovascular prosthesis |
| US7591826B2 (en) | 2000-12-28 | 2009-09-22 | Cardiac Dimensions, Inc. | Device implantable in the coronary sinus to provide mitral valve therapy |
| US6810882B2 (en) | 2001-01-30 | 2004-11-02 | Ev3 Santa Rosa, Inc. | Transluminal mitral annuloplasty |
| US6829017B2 (en) | 2001-02-01 | 2004-12-07 | Avid Technology, Inc. | Specifying a point of origin of a sound for audio effects using displayed visual information from a motion picture |
| WO2002062408A2 (en) | 2001-02-05 | 2002-08-15 | Viacor, Inc. | Method and apparatus for improving mitral valve function |
| WO2002062263A2 (en) | 2001-02-05 | 2002-08-15 | Viacor, Inc. | Apparatus and method for reducing mitral regurgitation |
| CA2668308A1 (en) | 2001-03-05 | 2002-12-05 | Viacor, Incorporated | Apparatus and method for reducing mitral regurgitation |
| WO2002076284A2 (en) * | 2001-03-23 | 2002-10-03 | Viacor, Inc. | Method and apparatus for reducing mitral regurgitation |
| ATE346568T1 (de) * | 2001-03-28 | 2006-12-15 | Cook Inc | Modulare stentendoprothese |
| US7186264B2 (en) * | 2001-03-29 | 2007-03-06 | Viacor, Inc. | Method and apparatus for improving mitral valve function |
| US6619291B2 (en) | 2001-04-24 | 2003-09-16 | Edwin J. Hlavka | Method and apparatus for catheter-based annuloplasty |
| US20020188170A1 (en) | 2001-04-27 | 2002-12-12 | Santamore William P. | Prevention of myocardial infarction induced ventricular expansion and remodeling |
| US6551271B2 (en) * | 2001-04-30 | 2003-04-22 | Biosense Webster, Inc. | Asymmetrical bidirectional steerable catheter |
| US6605086B2 (en) | 2001-05-02 | 2003-08-12 | Cardiac Pacemakers, Inc. | Steerable catheter with torque transfer system |
| US6585718B2 (en) | 2001-05-02 | 2003-07-01 | Cardiac Pacemakers, Inc. | Steerable catheter with shaft support system for resisting axial compressive loads |
| US6610058B2 (en) | 2001-05-02 | 2003-08-26 | Cardiac Pacemakers, Inc. | Dual-profile steerable catheter |
| US6652506B2 (en) | 2001-05-04 | 2003-11-25 | Cardiac Pacemakers, Inc. | Self-locking handle for steering a single or multiple-profile catheter |
| US6676702B2 (en) * | 2001-05-14 | 2004-01-13 | Cardiac Dimensions, Inc. | Mitral valve therapy assembly and method |
| US6800090B2 (en) | 2001-05-14 | 2004-10-05 | Cardiac Dimensions, Inc. | Mitral valve therapy device, system and method |
| US20020173811A1 (en) | 2001-05-21 | 2002-11-21 | Hosheng Tu | Apparatus and methods for valve removal |
| EP1432369B1 (en) | 2001-08-31 | 2008-02-27 | Mitral Interventions | Apparatus for valve repair |
| US6730058B2 (en) * | 2001-09-13 | 2004-05-04 | Cardiac Pacemakers, Inc. | Adjustable profile steerable catheter |
| US7144363B2 (en) * | 2001-10-16 | 2006-12-05 | Extensia Medical, Inc. | Systems for heart treatment |
| US6949122B2 (en) * | 2001-11-01 | 2005-09-27 | Cardiac Dimensions, Inc. | Focused compression mitral valve device and method |
| US6824562B2 (en) | 2002-05-08 | 2004-11-30 | Cardiac Dimensions, Inc. | Body lumen device anchor, device and assembly |
| US6575971B2 (en) | 2001-11-15 | 2003-06-10 | Quantum Cor, Inc. | Cardiac valve leaflet stapler device and methods thereof |
| US6976995B2 (en) | 2002-01-30 | 2005-12-20 | Cardiac Dimensions, Inc. | Fixed length anchor and pull mitral valve device and method |
| US6793673B2 (en) | 2002-12-26 | 2004-09-21 | Cardiac Dimensions, Inc. | System and method to effect mitral valve annulus of a heart |
| US6908478B2 (en) * | 2001-12-05 | 2005-06-21 | Cardiac Dimensions, Inc. | Anchor and pull mitral valve device and method |
| US6978176B2 (en) | 2001-12-08 | 2005-12-20 | Lattouf Omar M | Treatment for patient with congestive heart failure |
| DE10161543B4 (de) | 2001-12-11 | 2004-02-19 | REITAN, Öyvind | Implantat zur Behandlung einer Insuffizienz einer Herzklappe |
| US6755812B2 (en) * | 2001-12-11 | 2004-06-29 | Cardiac Pacemakers, Inc. | Deflectable telescoping guide catheter |
| US7247149B2 (en) | 2001-12-20 | 2007-07-24 | Advanced Cardiovascular Systems, Inc. | Contact and penetration depth sensor for a needle assembly |
| US20030120341A1 (en) | 2001-12-21 | 2003-06-26 | Hani Shennib | Devices and methods of repairing cardiac valves |
| US20030120340A1 (en) | 2001-12-26 | 2003-06-26 | Jan Liska | Mitral and tricuspid valve repair |
| US6764510B2 (en) * | 2002-01-09 | 2004-07-20 | Myocor, Inc. | Devices and methods for heart valve treatment |
| US6960229B2 (en) | 2002-01-30 | 2005-11-01 | Cardiac Dimensions, Inc. | Device and method for modifying the shape of a body organ |
| US7048754B2 (en) | 2002-03-01 | 2006-05-23 | Evalve, Inc. | Suture fasteners and methods of use |
| US7004958B2 (en) | 2002-03-06 | 2006-02-28 | Cardiac Dimensions, Inc. | Transvenous staples, assembly and method for mitral valve repair |
| US7364567B2 (en) * | 2002-06-10 | 2008-04-29 | Abbott Cardiovascular Systems Inc. | Systems and methods for detecting tissue contact and needle penetration depth |
| US6761734B2 (en) | 2002-07-22 | 2004-07-13 | William S. Suhr | Segmented balloon catheter for stenting bifurcation lesions |
| EP1545371B1 (en) * | 2002-08-01 | 2016-04-13 | Robert A. Levine | Cardiac devices and methods for minimally invasive repair of ischemic mitral regurgitation |
| US8172856B2 (en) | 2002-08-02 | 2012-05-08 | Cedars-Sinai Medical Center | Methods and apparatus for atrioventricular valve repair |
| CA2496007C (en) | 2002-08-13 | 2013-02-05 | The General Hospital Corporation | Cardiac devices and uses thereof for percutaneous repair of atrioventricular valves |
| US6951549B1 (en) | 2002-09-30 | 2005-10-04 | Advanced Cardiovascular Systems, Inc. | Systems and methods for detecting tissue contact and needle penetration depth |
| US7087064B1 (en) | 2002-10-15 | 2006-08-08 | Advanced Cardiovascular Systems, Inc. | Apparatuses and methods for heart valve repair |
| US7247134B2 (en) | 2002-11-12 | 2007-07-24 | Myocor, Inc. | Devices and methods for heart valve treatment |
| WO2004058110A2 (en) * | 2002-12-24 | 2004-07-15 | Ovion, Inc. | Contraceptive device and delivery system |
| US20040138683A1 (en) | 2003-01-09 | 2004-07-15 | Walter Shelton | Suture arrow device and method of using |
| US7314485B2 (en) | 2003-02-03 | 2008-01-01 | Cardiac Dimensions, Inc. | Mitral valve device using conditioned shape memory alloy |
| EP1648311A4 (en) * | 2003-06-27 | 2010-11-17 | Conceptus Inc | METHODS AND DEVICES FOR OCCLUSION OF BODY LIGHT AND / OR ADMINISTRATION OF THERAPEUTIC AGENTS |
| US7104999B2 (en) | 2003-06-28 | 2006-09-12 | Ethicon, Inc. | Surgical anchor inserter |
| US7431726B2 (en) | 2003-12-23 | 2008-10-07 | Mitralign, Inc. | Tissue fastening systems and methods utilizing magnetic guidance |
| WO2005074845A1 (en) | 2004-02-02 | 2005-08-18 | Ams Research Corporation | Enhancing tissue ingrowth for contraception |
-
2003
- 2003-09-30 US US10/676,616 patent/US7998112B2/en active Active
- 2003-12-18 US US10/740,725 patent/US8016784B1/en not_active Expired - Fee Related
-
2004
- 2004-09-23 EP EP10185686.2A patent/EP2308540B1/en not_active Expired - Lifetime
- 2004-09-23 JP JP2006533979A patent/JP4907351B2/ja not_active Expired - Fee Related
- 2004-09-23 ES ES10185686.2T patent/ES2492140T3/es not_active Expired - Lifetime
- 2004-09-23 WO PCT/US2004/031403 patent/WO2005032637A2/en active Application Filing
- 2004-09-23 ES ES04784995T patent/ES2373089T3/es not_active Expired - Lifetime
- 2004-09-23 AT AT04784995T patent/ATE524210T1/de not_active IP Right Cessation
- 2004-09-23 EP EP04784995A patent/EP1673129B1/en not_active Expired - Lifetime
-
2010
- 2010-07-23 JP JP2010165516A patent/JP5228004B2/ja not_active Expired - Fee Related
-
2011
- 2011-10-12 HK HK11110787.3A patent/HK1156555A1/xx not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| US8016784B1 (en) | 2011-09-13 |
| JP2010264280A (ja) | 2010-11-25 |
| ATE524210T1 (de) | 2011-09-15 |
| US20050070844A1 (en) | 2005-03-31 |
| EP2308540B1 (en) | 2014-04-30 |
| EP1673129A2 (en) | 2006-06-28 |
| HK1156555A1 (en) | 2012-06-15 |
| WO2005032637A2 (en) | 2005-04-14 |
| EP2308540A1 (en) | 2011-04-13 |
| JP2007507294A (ja) | 2007-03-29 |
| WO2005032637A3 (en) | 2005-07-21 |
| JP4907351B2 (ja) | 2012-03-28 |
| ES2492140T3 (es) | 2014-09-08 |
| EP1673129B1 (en) | 2011-09-14 |
| ES2373089T3 (es) | 2012-01-31 |
| US7998112B2 (en) | 2011-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5228004B2 (ja) | 撓み可能なカテーテル組立体およびそれを製造する方法 | |
| US10814100B2 (en) | Deflectable catheter with hinge | |
| US9433751B2 (en) | Steerable catheter with distal tip orientation sheaths | |
| US7048711B2 (en) | Drug delivery catheter and steering guide catheter combination | |
| CN106166067B (zh) | 具有可调节的挠曲的导管 | |
| US6210407B1 (en) | Bi-directional electrode catheter | |
| US6171277B1 (en) | Bi-directional control handle for steerable catheter | |
| US6183463B1 (en) | Bidirectional steerable cathether with bidirectional control handle | |
| US6183435B1 (en) | Multi-directional steerable catheters and control handles | |
| US6267746B1 (en) | Multi-directional steerable catheters and control handles | |
| US8118803B1 (en) | Deflectable catheter assembly | |
| US20020161353A1 (en) | Steerable catheter with reinforced tip | |
| CN108158571B (zh) | 具有环形电极的可操控式引导护套及相关的构造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120807 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130304 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130318 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5228004 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160322 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |