JP5204992B2 - チャック装置 - Google Patents
チャック装置 Download PDFInfo
- Publication number
- JP5204992B2 JP5204992B2 JP2007153774A JP2007153774A JP5204992B2 JP 5204992 B2 JP5204992 B2 JP 5204992B2 JP 2007153774 A JP2007153774 A JP 2007153774A JP 2007153774 A JP2007153774 A JP 2007153774A JP 5204992 B2 JP5204992 B2 JP 5204992B2
- Authority
- JP
- Japan
- Prior art keywords
- chuck body
- cam
- chuck
- jaw
- master jaw
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 210000000078 claw Anatomy 0.000 claims description 74
- 230000002093 peripheral effect Effects 0.000 claims description 36
- 230000001154 acute effect Effects 0.000 claims description 6
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 238000000034 method Methods 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
Images







Landscapes
- Gripping On Spindles (AREA)
Description
さらに、例えば、チャック本体1の中心軸6に比較的近い部分に、前記ストッパ装置への当接部分(ワークwの基準面)を有するワークwもあれば、中心軸6から比較的遠い部分に、前記ストッパ装置への当接部分を有するワークwもある。また、その当接部分のチャック本体1に対する軸方向位置も、ワークwの種別によってさまざまである。
したがって、軸方向に向くネジBの締め付けによる固定では、チャック本体1に対する把持爪10の位置決め精度が劣るとともに、その着脱作業は面倒なものとなる。このため、チャック装置へのワークwの装着にかかる作業効率を低下させるので好ましくない。
このとき、把持爪のチャック本体への軸方向位置決めは前記両係合端面が、また、径方向への位置決めは、マスタージョウのピン孔内にぴったり嵌るように挿通されるカム軸とそのカム軸の外周面に形成されたカム面、及び把持爪に形成され前記カム軸のカム面に噛み合うカム当接面との間で行われる。
このため、把持爪とマスタージョウとのチャック本体の軸方向、径方向への位置決めがいずれも確実且つ容易であり、把持爪の取替えが簡単にできるようになる。すなわち、異なる種別のワークに簡単に対応できるようになる。
このようにすれば、ワークを把持した際に、ワークから把持爪に作用する軸方向前方への反力によって、両係合端面同士の密着度合いが緩みにくくなるので、より好ましいといえる。
その構成として、例えば、前記把持爪を、前記係合端面を備えるサブジョウと、そのサブジョウに設けられ前記チャック本体の軸方向に伸びる固定軸とを備えたものとし、前記固定軸が前記サブジョウに形成された係止部に固定されるようになっており、前記カム当接面は前記固定軸に形成されている構成を採用し得る。
カム当接面が固定軸に形成されていれば、把持爪にカム当接面を形成する場合よりも、そのカム当接面の形成が容易である。
この構成によれば、前記把持爪とマスタージョウとの径方向への位置決めがさらに確実となる。
なお、その両係合周面を、前記中心軸周りの円弧面とすれば、チャック本体の中心軸に対する両者の周方向への位置ずれが生じにくくなるので、さらなる精度の向上に有効である。
具体的な構成は、前記チャック本体がストッパ装置を備える場合において、そのストッパ装置は前記各把持爪で把持されたワークの端面に当接してそのワークを前記チャック本体の軸方向に位置決めするようになっており、前記ストッパ装置をボールプランジャ機構を備えた取付装置を介して前記チャック本体に着脱自在とし、その取付装置は、前記チャック本体とストッパ装置との軸方向の位置決め機能と、その位置決めされた状態における前記ボールプランジャ機構による抜け止め機能とを備えた構成とし得る。
ボールプランジャ機構を備える取付装置による位置決め機能及びその位置での抜け止め機能を活用すれば、チャック本体へのストッパ装置の着脱を簡素化し得るので、上記把持爪の着脱と併せて、同一のチャック装置によって異なる種別のワークを把持しようとする際の作業の容易化に貢献し得る。
その小断面の部分は、図3に示すように、軸周りに形成された弧状面とフラット面とからなる断面D字状であり、その弧状面は、前記カム軸21の軸中心pからの距離が反時計回り方向に向かうにつれて徐々に遠ざかるカム面21aとなっている。
サブジョウ11の係合端面10a及び係合周面10bをそれぞれマスタージョウ12の係合端面12a及び係合周面12bに宛がうとともに、前記溝17bから突出するプルスタッド13の軸部をマスタージョウ12の固定軸挿通孔25内に挿入する。
このプルスタッド13は、前記矢印C方向への押し付け力の径方向分力により内径側へ押し付けられるとともに、同時に、その軸方向分力によりやや軸方向後方(矢印B方向)に引かれ、マスタージョウ12の係合端面12aとサブジョウ11の係合端面10a同士が圧力をもって密着した状態に固定される。その密着により、サブジョウ11とマスタージョウ12とがチャック本体1の軸方向に位置決めされるとともに、その位置で、サブジョウ11とマスタージョウ12とが不動に固定される。
また、この実施形態のように、前記両係合周面10b,12bをそれぞれ前記中心軸6と同心の円弧面とすることにより、前記径方向への位置決め機能に加え、チャック本体1の中心軸6周りにおける周方向への位置決め機能も高精度である。
このため、前記カム軸21とプルスタッド13とがサブジョウ11をマスタージョウ12側に引込む際に、その鋭角αを夾む両面10a,10b;12a,12b間の挟み込み効果によりその位置ずれを防ぎ、前記両係合端面10a,12aと前記両係合周面10b,12bとをそれぞれしっかりと密着させやすい。
このような特性は、特に、ワークwを把持する際に、そのワークwをチャック本体1側に対して後方側へ引き込んで掴むタイプの引き込み式チャックの場合は、把持爪10がワークwから軸方向前方への反力を受けやすいので、より有効であるといえる。
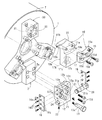
サイドプレート16,16は、図2に示すように、それぞれビス穴16cを複数備えている。それらのビス穴16cにネジ16a,16bを挿通して、そのネジ16a,16bをそれぞれサブジョウ11に設けたネジ孔11b及びマスタージョウ12に設けたネジ孔12fにねじ込むことにより、前記サブジョウ11と前記マスタージョウ12との固定の強化を図っている。
ストッパリング42は、基部41に設けたボルト孔41aにボルト43をねじ込むことにより、その基部41と一体に固定される。
また、ベース部30は、本体部38の前面に開口して設けた開口部37a、及びその側面に開口して設けた開口部37bに通じるエア通路37を備え、そのエア通路37はチャック本体1のドローバ3等に設けた通路を通じて図示しない気体供給源に通じている。
チャック本体1の前面にストッパ装置40を宛がい、ベース部30の各取付装置35を、ストッパ装置40の後面に設けた凹部45内にそれぞれ収納させる。このとき、基部41のピン孔41bに嵌るピン32が、ベース部30に設けたガイド孔に嵌るので、両者の位置合わせが容易となっている。
なお、この過程で、前記油圧回路31内の油圧はロックされた状態であり、前記ピストンロッド39は凹部33内で後方に向かって押し込むことができない状態である。また、前記エアブローは、前記後面34aと前面38aとが密着するまでの間、その後面34aと前面38aとの間の隙間に継続して作用しているが、凹部45の底部にも継続して作用している。
2 揺動部材(ジョウアクチュエータ)
3 ドローバ
4 駆動部材(アクチュエータ)
4a フランジ部
5 バックプレート
6 中心軸(チャック本体の中心軸)
7 ハウジング
8 ドローバボルト
10 把持爪
10a、12a 係合端面
10b、12b 係合周面
11 サブジョウ
12 マスタージョウ
13 固定軸(プルスタッド)
13a カム当接面
14 弾性部材(コイルバネ)
15 ジョウピース
16 サイドプレート
17 係止部
20 締付手段
21 カム軸
21a カム面
24 ピン孔
25 固定軸挿通孔
30 ベース部
31 油圧回路
35 取付装置
36 ボールプランジャ
37 エア通路
40 ストッパ装置
w ワーク
Claims (6)
- チャック本体1の中心軸6周りに複数の把持爪10を設け、前記各把持爪10を前記チャック本体1の径方向に移動させることによりその各把持爪10でワークwを前記中心軸6と同心に把持するチャック装置において、
前記チャック本体1の前面に径方向に移動自在のマスタージョウ12を設け、前記各把持爪10は、締付手段20によって前記マスタージョウ12に着脱自在に取り付けられてそのマスタージョウ12とともに径方向へ移動するようになっており、
前記各把持爪10と前記マスタージョウ12とは前記取り付け状態で相互に前記チャック本体1の軸方向に向かい合う係合端面10a,12aをそれぞれ備え、前記締付手段20は、前記マスタージョウ12に形成され前記チャック本体1の軸方向及び半径方向に直交する方向に伸びるピン孔24と、そのピン孔24内にぴったり嵌るように挿通されるカム軸21と、そのカム軸21の外周面に形成されたカム面21aと、前記把持爪10に形成され前記カム軸21のカム面21aに噛み合うカム当接面13aとを備え、前記カム軸21をそのカム軸21の軸周りに回転させることにより前記カム面21aと前記カム当接面13aとが係脱し、その係脱による前記両係合端面10a,12a同士の密着及び密着解除により前記各把持爪10と前記マスタージョウ12とが着脱自在であるとともに、前記各把持爪10と前記マスタージョウ12とは、前記両係合端面10a,12a同士の密着により前記チャック本体1の軸方向に位置決めされ且つ前記カム面21aと前記カム当接面13aとの係合により前記チャック本体1の径方向に位置決めされ、
前記把持爪10は、前記係合端面10aを備えるサブジョウ11と、そのサブジョウ11に設けられ前記チャック本体1の軸方向に伸びる固定軸13とを備え、前記固定軸13は前記サブジョウ11に形成された係止部17に固定されるようになっており、前記カム当接面13aは前記固定軸13に形成されて、前記カム軸21は前記固定軸13を挟んで前記チャック本体1の軸方向に直交する方向の両側で前記マスタージョウ12に支持されていることを特徴とするチャック装置。 - 前記カム軸21は、前記カム面21aと前記カム当接面13aとの係合状態において、前記ワークwから前記把持爪10に前記両係合端面10a,12a同士が密着解除する方向へ力が作用することにより前記カム軸21に軸周り回転する力が作用した場合に、その密着解除を阻止する向きに前記カム面21aが形成されていることを特徴とする請求項1に記載のチャック装置。
- 前記各把持爪10と前記マスタージョウ12とは前記取り付け状態で相互に径方向に向かい合う係合周面10b,12bをそれぞれ備え、前記締付手段20は、前記両係合端面10a,12a同士の密着と同時に前記両係合周面10b,12b同士を密着させ、前記両係合周面10b,12bは、前記中心軸6周りの円弧面であり、前記固定軸13は、その軸心が前記両係合周面10b,12bの周方向中心とチャック本体1の軸心とを結ぶ線の延長に交差する位置にあることを特徴とする請求項1又は2に記載のチャック装置。
- 前記両係合周面10b,12bは、それぞれ前記両係合端面10a,12aに対して前記中心軸6を通る断面において鋭角を成すことを特徴とする請求項3に記載のチャック装置。
- 前記チャック本体1はストッパ装置40を備え、前記ストッパ装置40は前記各把持爪10で把持されたワークwの端面に当接してそのワークwを前記チャック本体1の軸方向に位置決めするようになっており、前記ストッパ装置40をボールプランジャ機構を備えた取付装置35を介して前記チャック本体1に着脱自在とし、その取付装置35は、前記チャック本体1とストッパ装置40との軸方向の位置決め機能と、その位置決めされた状態における前記ボールプランジャ機構による抜け止め機能とを備えたことを特徴とする請求項1乃至4のいずれか一つに記載のチャック装置。
- チャック本体1の周方向に沿って複数の取付装置35を配置する場合において、その各取付装置35をベース部30を介して連結し、そのベース部30を前記チャック本体1に着脱自在としたことを特徴とする請求項5に記載のチャック装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007153774A JP5204992B2 (ja) | 2007-06-11 | 2007-06-11 | チャック装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007153774A JP5204992B2 (ja) | 2007-06-11 | 2007-06-11 | チャック装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008302484A JP2008302484A (ja) | 2008-12-18 |
| JP5204992B2 true JP5204992B2 (ja) | 2013-06-05 |
Family
ID=40231632
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007153774A Active JP5204992B2 (ja) | 2007-06-11 | 2007-06-11 | チャック装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5204992B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4720899B2 (ja) | 2008-11-27 | 2011-07-13 | ソニー株式会社 | 通信装置、通信方法、プログラム、および通信システム |
| JP2010158751A (ja) * | 2009-01-09 | 2010-07-22 | Amada Co Ltd | 鋸盤 |
| JP5769495B2 (ja) * | 2011-05-23 | 2015-08-26 | 帝国チャック株式会社 | チャック装置のストッパ取付構造 |
| CN106240900B (zh) * | 2016-08-29 | 2018-09-11 | 如皋市包装食品机械有限公司 | 一种旋转式多工位夹糖机构 |
| US10981282B2 (en) * | 2017-06-20 | 2021-04-20 | Kosmek Ltd. | Gripping device |
| CN110480043B (zh) * | 2019-08-20 | 2024-06-18 | 浙江万里扬新能源驱动科技有限公司 | 环形工件加工用夹具 |
| CN112719327B (zh) * | 2020-12-10 | 2024-06-07 | 黄锐 | 卡盘 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2584960B1 (fr) * | 1985-07-17 | 1987-10-02 | Sandvik Tobler | Systeme de changement de mors de serrage sur une machine-outil |
| JPH02232107A (ja) * | 1989-03-01 | 1990-09-14 | Utsunomiya Kogu Seisakusho:Kk | チャックジョウの着脱装置 |
| JP2740938B2 (ja) * | 1994-07-01 | 1998-04-15 | 合資会社日下歯車製作所 | 外径コレットチャック |
| JP3653645B2 (ja) * | 1995-09-30 | 2005-06-02 | 株式会社北川鉄工所 | 前部交換式フィンガーチャック |
| JP2004255484A (ja) * | 2003-02-25 | 2004-09-16 | Pascal Engineering Corp | クランプ装置 |
-
2007
- 2007-06-11 JP JP2007153774A patent/JP5204992B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008302484A (ja) | 2008-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5204992B2 (ja) | チャック装置 | |
| JPS5853989B2 (ja) | 留め具打込み工具用ノ−ズピ−ス | |
| WO2005000530A1 (ja) | ビットホルダ装置 | |
| JPH02503768A (ja) | 工具ホルダ軸部をクランプする装置 | |
| JP2006326831A (ja) | 柄付き工具用クランプ構造 | |
| US7249770B2 (en) | Locking drill chuck | |
| JP5279411B2 (ja) | ワークの位置決め装置 | |
| JP4972362B2 (ja) | ダイヤフラムチャック | |
| US7556269B2 (en) | Tool-carrier chuck for rotating machine, furnished with locking means | |
| JP2662018B2 (ja) | アタッチメント着脱装置 | |
| JP2002205233A (ja) | チャック機構用爪部材およびその製造方法 | |
| TW202116446A (zh) | 構造體及卡盤 | |
| JP4544969B2 (ja) | 締結装置 | |
| US11660682B2 (en) | Chuck with locking clutch | |
| JPH02172605A (ja) | 締め付け具 | |
| TW201900303A (zh) | 夾具機構 | |
| JP2012218117A (ja) | チャック装置の把持爪取付構造 | |
| JP7308528B2 (ja) | チャック装置 | |
| WO2024234217A1 (en) | Chuck with quick connect spindle interface | |
| JP2000218414A (ja) | コレットチャックジョイント装置 | |
| JP2009050973A (ja) | チャック | |
| JP5766502B2 (ja) | 締結装置 | |
| JP2000079507A (ja) | 締結部材の分解工具 | |
| JP3691957B2 (ja) | クランプ装置,固定装置およびバルブシート加工工具装置 | |
| JP2006346780A (ja) | 工作機械用チャック |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100608 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120529 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120730 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130218 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5204992 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |