JP5164355B2 - 荷電粒子ビームの走査方法及び荷電粒子線装置 - Google Patents
荷電粒子ビームの走査方法及び荷電粒子線装置 Download PDFInfo
- Publication number
- JP5164355B2 JP5164355B2 JP2006261651A JP2006261651A JP5164355B2 JP 5164355 B2 JP5164355 B2 JP 5164355B2 JP 2006261651 A JP2006261651 A JP 2006261651A JP 2006261651 A JP2006261651 A JP 2006261651A JP 5164355 B2 JP5164355 B2 JP 5164355B2
- Authority
- JP
- Japan
- Prior art keywords
- charged particle
- particle beam
- scanning
- reference object
- objects
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/261—Details
- H01J37/265—Controlling the tube; circuit arrangements adapted to a particular application not otherwise provided, e.g. bright-field-dark-field illumination
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/15—Means for deflecting or directing discharge
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/26—Electron or ion microscopes
- H01J2237/282—Determination of microscope properties
- H01J2237/2826—Calibration
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/304—Controlling tubes
- H01J2237/30433—System calibration
- H01J2237/3045—Deflection calibration
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Length-Measuring Devices Using Wave Or Particle Radiation (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
Description
(Critical Dimension-Scanning Electron Microscope:CD−SEM) や、欠陥評価用走査電子顕微鏡(Defect Review-Scanning electron Microscope:DR−SEM)がある。この内、特にCD−SEMでは測定対象となる半導体ウェハの各部位を精度良く測長する必要がある。
(±X,±Y)の全領域を計測しているが、対称性が予めわかっているのであれば、計測範囲を全領域の1/2或いは1/4の範囲にしてもよい。
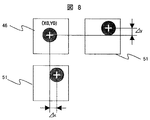
(Step104)から誤差量の計測(Step109)までを繰りかえす間にステージ移動量の測定を行わなければならない。例えば図14のように電子ビーム36の移動量が「0」である領域46で画像取得してドットパターンの重心位置を計測する。これを第1の領域
46とする。
「0」なので、第1の領域46と第2の領域46の重心位置のずれ量がステージのドリフト量として計測できる。もちろん、ずれ量が無い場合はステージのドリフトが無いことを意味する。
Y0′)を求める(Step122)。第1の領域46の対象物の重心位置(X0,Y0)との差(Δx0,Δy0)を計算してこれをステージのドリフト量とする(Step123)。このドリフト量をピッチ「11」で割った値(Δx0/11,Δy0/11)を領域51から領域61までの点での測定した誤差量(Δxn,Δyn)に各々加算、或いは減算していく。この値を(Δxn′,Δyn′)で表し、電子ビーム36の走査位置の誤差量として計算される。これを式1で表す。
(式1)
(Δxn′,Δyn′)=(Δxn+Δx0/s,Δyn+Δy0/s)
ドリフト量が「0」であればステージのドリフトが無いことを示し、それ以外の場合はステージの移動を考慮した補正を行わなければならない。
36の移動量制御の精度が向上する。
2 電子源
3 引出電極
4 加速電極
5 レンズ制御電源
6,19 電極
7,8 集束レンズ
9 対物レンズ
10 クロスオーバ
11 位置モニター用測定装置
12 試料ステージ
13 試料
14 可変減速電源
15 絞り
16a,16b 偏向器
17 ブランキング偏向器
18 走査信号発生器
20 直交電磁界発生器
21 検出器
22 試料高さ測定装置
23 ステージ駆動装置
24 走査信号発生器
25 走査位置制御部
26 スケール
27 記憶部
31 制御部
32 像表示装置
33 電子
34 電極制御部
36 電子ビーム
37 画像処理部
40 非点収差補正器
41a,41b 偏向器
42 測定結果マップ
43 光軸
44 理想マップ
45 非点収差補正制御部
46,47,51,52,53 領域
48 誤差量
49 移動範囲
50 表示領域
54 測定結果表
55 入力領域
56 画像表示領域
57 指定ポインタ
Claims (12)
- 偏向器を用いて荷電粒子線の走査位置を偏向して、
前記荷電粒子線を走査する荷電粒子線の走査方法において、
基準対象物と、当該基準対象物との間に既知の寸法を有する複数の対象物が形成された試料の前記基準対象物に、前記荷電粒子線の走査位置を位置づけ、
更に前記荷電粒子線の走査位置を、前記複数の対象物を走査するように偏向し、
当該偏向された走査位置と前記対象物との第1の位置誤差を、前記複数の対象物ごとに検出する工程と、
前記基準対象物に、再度前記荷電粒子線の走査位置を位置づけ、
当該再度位置付けられた走査位置と、前記基準対象物との第2の位置誤差を検出する工程と、
前記第2の位置誤差を当該走査した対象物の数で除算して第3の位置誤差を求め、
当該求めた第3の位置誤差を、当該複数の対象物ごとに検出された第1の位置誤差に加算、或いは減算する工程と、
当該加算、或いは減算結果に基づいて、
前記荷電粒子線の走査位置の偏向範囲における前記偏向器の偏向信号を導出する工程と、を有することを特徴とする荷電粒子線の走査方法。 - 請求項1において、
前記基準対象物は、前記荷電粒子線の光軸下に位置づけられることを特徴とする荷電粒子線の走査方法。 - 請求項1において、
前記荷電粒子線の走査によって、前記基準対象物と、前記複数の対象物の画像を取得し、前記基準対象物の重心と前記対象物の重心間の距離に基づいて、
前記第1の位置誤差を検出することを特徴とする荷電粒子線の走査方法。 - 請求項1において、
前記荷電粒子線の走査によって、前記基準対象物と、前記複数の対象物の画像を取得し、当該基準対象物と前記複数の対象物との間でパターンマッチングを行うことによって得られる両者間の距離に基づいて、前記第1の位置誤差を検出することを特徴とする荷電粒子線の走査方法。 - 請求項1において、
前記複数の対象物は、前記試料上に既知の間隔にて二次元的に配列されていることを特徴とする荷電粒子線の走査方法。 - 請求項1において、
前記第3の位置誤差は、
前記試料を移動させる移動ステージの移動成分であることを特徴とする荷電粒子線の走査方法。 - 荷電粒子源から放出される荷電粒子線の走査位置を偏向する偏向器と、
当該偏向器に偏向信号を供給する制御部を備えた荷電粒子線装置において、
前記制御部は、基準対象物と、当該基準対象物との間に既知の寸法を有する複数の対象物が形成された試料の前記基準対象物に、
前記荷電粒子線の走査位置を位置づけるように前記偏向器を制御し、
更に前記荷電粒子線の走査位置を、前記複数の対象物を走査するように偏向し、
当該偏向された走査位置と前記対象物との第1の位置誤差を、前記複数の対象物ごとに検出したのちに、
前記基準対象物に、再度前記荷電粒子線の走査位置を位置づけ、
当該再度位置付けられた走査位置と、前記基準対象物との第2の位置誤差を検出し、
前記第2の位置誤差を当該走査した対象物の数で除算して第3の位置誤差を求め、
当該求めた第3の位置誤差を、当該複数の対象物ごとに検出された第1の位置誤差に加算、或いは減算し、
当該加算、或いは減算結果に基づいて、
前記荷電粒子線の走査位置の偏向範囲における前記偏向器の偏向信号を導出することを特徴とする荷電粒子線装置。 - 請求項7において、
前記制御部は、前記荷電粒子線の走査によって、前記基準対象物と、前記複数の対象物の画像を取得し、
前記基準対象物の重心と前記対象物の重心間の距離に基づいて、
前記第1の位置誤差を検出することを特徴とする荷電粒子線装置。 - 請求項7において、
前記制御部は、前記荷電粒子線の走査によって、前記基準対象物と、前記複数の対象物の画像を取得し、当該基準対象物と前記複数の対象物との間でパターンマッチングを行うことによって得られる両者間の距離に基づいて、
前記第1の位置誤差を検出することを特徴とする荷電粒子線装置。 - 請求項7において、
前記制御部は、前記荷電粒子線の走査位置の偏向範囲における複数の位置について、前記偏向器に供給される信号を個々に記憶する記憶部を備えていることを特徴とする荷電粒子線装置。 - 請求項10において、
前記記憶部には、前記導出された偏向信号が記憶されていることを特徴とする荷電粒子装置。 - 請求項7において、
前記制御部は、前記荷電粒子線の走査位置の偏向範囲における複数の位置について、
非点補正器に供給される信号、対物レンズに供給される信号、或いは試料に印加される電圧を、個々に記憶する記憶部を備えていることを特徴とする荷電粒子線装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006261651A JP5164355B2 (ja) | 2006-09-27 | 2006-09-27 | 荷電粒子ビームの走査方法及び荷電粒子線装置 |
| US11/889,057 US7935925B2 (en) | 2006-09-27 | 2007-08-08 | Charged particle beam scanning method and charged particle beam apparatus |
| US13/079,361 US8338781B2 (en) | 2006-09-27 | 2011-04-04 | Charged particle beam scanning method and charged particle beam apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006261651A JP5164355B2 (ja) | 2006-09-27 | 2006-09-27 | 荷電粒子ビームの走査方法及び荷電粒子線装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008084626A JP2008084626A (ja) | 2008-04-10 |
| JP2008084626A5 JP2008084626A5 (ja) | 2009-12-03 |
| JP5164355B2 true JP5164355B2 (ja) | 2013-03-21 |
Family
ID=39223921
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006261651A Active JP5164355B2 (ja) | 2006-09-27 | 2006-09-27 | 荷電粒子ビームの走査方法及び荷電粒子線装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7935925B2 (ja) |
| JP (1) | JP5164355B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11056310B2 (en) | 2017-01-12 | 2021-07-06 | Hitachi High-Tech Corporation | Charged-particle beam device |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011013342A1 (ja) * | 2009-07-27 | 2011-02-03 | 株式会社日立ハイテクノロジーズ | パターン評価方法、その装置、及び電子線装置 |
| JP5393797B2 (ja) * | 2009-09-11 | 2014-01-22 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置の信号処理方法、及び信号処理装置 |
| DE102009055271A1 (de) * | 2009-12-23 | 2011-06-30 | Carl Zeiss NTS GmbH, 73447 | Verfahren zur Erzeugung einer Darstellung eines Objekts mittels eines Teilchenstrahls sowie Teilchenstrahlgerät zur Durchführung des Verfahrens |
| JP5624774B2 (ja) * | 2010-02-26 | 2014-11-12 | 株式会社日立ハイテクノロジーズ | 走査電子顕微鏡の光学条件設定方法、及び走査電子顕微鏡 |
| JP5591617B2 (ja) * | 2010-07-29 | 2014-09-17 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置および該装置の制御方法 |
| JP2012068051A (ja) * | 2010-09-21 | 2012-04-05 | Toshiba Corp | パターン欠陥検査装置およびパターン欠陥検査方法 |
| JP5677236B2 (ja) * | 2011-08-22 | 2015-02-25 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| JP5941704B2 (ja) * | 2012-02-28 | 2016-06-29 | 株式会社日立ハイテクノロジーズ | パターン寸法測定装置、及びコンピュータプログラム |
| JP6155137B2 (ja) * | 2013-08-09 | 2017-06-28 | 株式会社日立ハイテクノロジーズ | 走査型電子顕微鏡を用いた処理装置及び処理方法 |
| JP2017067443A (ja) * | 2013-12-27 | 2017-04-06 | 株式会社日立ハイテクノロジーズ | パターン測定装置、及びコンピュータープログラム |
| KR101639581B1 (ko) * | 2014-08-13 | 2016-07-15 | 한국표준과학연구원 | 하전입자 현미경의 입자빔 제어 장치 및 방법 |
| EP3016130A1 (en) * | 2014-10-28 | 2016-05-04 | Fei Company | Composite scan path in a charged particle microscope |
| US10665421B2 (en) * | 2018-10-10 | 2020-05-26 | Applied Materials, Inc. | In-situ beam profile metrology |
| JP7469097B2 (ja) | 2020-03-26 | 2024-04-16 | 東レエンジニアリング先端半導体Miテクノロジー株式会社 | 走査電子顕微鏡および画像生成方法 |
| JP7455676B2 (ja) * | 2020-06-05 | 2024-03-26 | 株式会社日立ハイテク | 電子顕微鏡および電子顕微鏡のフォーカス調整方法 |
| JP7041207B2 (ja) * | 2020-07-22 | 2022-03-23 | 株式会社日立ハイテク | 荷電粒子ビーム装置 |
| DE102022207930A1 (de) * | 2022-08-01 | 2024-02-01 | Carl Zeiss Smt Gmbh | Verfahren und Vorrichtung zum Korrigieren von Abbildungsfehlern beim Rastern eines geladenen Teilchenstrahles über eine Probe |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63119235A (ja) * | 1986-11-07 | 1988-05-23 | Hitachi Ltd | 電子線描画装置の偏向歪補正方法 |
| JPH04112443A (ja) * | 1990-09-01 | 1992-04-14 | Hitachi Ltd | 二次イオン質量分析装置 |
| JPH0513037A (ja) * | 1991-07-02 | 1993-01-22 | Fujitsu Ltd | 荷電粒子ビーム装置及びその制御方法 |
| JP3192500B2 (ja) * | 1992-11-19 | 2001-07-30 | 株式会社日立製作所 | 電子線描画方法および電子線描画装置 |
| US5757015A (en) * | 1995-06-08 | 1998-05-26 | Fujitsu Limited | Charged-particle-beam exposure device and charged-particle-beam exposure method |
| JPH10213556A (ja) * | 1997-01-29 | 1998-08-11 | Hitachi Ltd | 表面元素分析装置及び分析方法 |
| JPH1130850A (ja) * | 1997-07-11 | 1999-02-02 | Nikon Corp | 投影露光装置用マスク,投影露光方法および投影露光装置 |
| JPH11160054A (ja) * | 1997-12-02 | 1999-06-18 | Jeol Ltd | パターン測長方法 |
| JP3463599B2 (ja) * | 1998-04-20 | 2003-11-05 | 株式会社日立製作所 | 試料保持機,半導体製造装置,半導体検査装置,回路パターン検査装置,荷電粒子線応用装置,校正用基板,試料の保持方法,回路パターン検査方法、および、荷電粒子線応用方法 |
| US6509564B1 (en) * | 1998-04-20 | 2003-01-21 | Hitachi, Ltd. | Workpiece holder, semiconductor fabricating apparatus, semiconductor inspecting apparatus, circuit pattern inspecting apparatus, charged particle beam application apparatus, calibrating substrate, workpiece holding method, circuit pattern inspecting method, and charged particle beam application method |
| JP3666267B2 (ja) * | 1998-09-18 | 2005-06-29 | 株式会社日立製作所 | 荷電粒子ビーム走査式自動検査装置 |
| TW546549B (en) * | 1998-11-17 | 2003-08-11 | Advantest Corp | Electron beam exposure apparatus and exposure method |
| JP2000260381A (ja) * | 1999-03-05 | 2000-09-22 | Sanyuu Denshi Kk | 走査型画像の処理装置 |
| JP3494068B2 (ja) * | 1999-03-30 | 2004-02-03 | 株式会社日立製作所 | 荷電粒子線装置 |
| JP2001044102A (ja) * | 1999-07-28 | 2001-02-16 | Hitachi Ltd | 電子線描画装置 |
| JP4581223B2 (ja) * | 2000-10-27 | 2010-11-17 | 株式会社日立製作所 | 集束イオンビーム装置 |
| JP4074240B2 (ja) * | 2003-09-30 | 2008-04-09 | 株式会社東芝 | 偏向歪み補正システム、偏向歪み補正方法、偏向歪み補正プログラム及び半導体装置の製造方法 |
| JP2005197338A (ja) * | 2004-01-05 | 2005-07-21 | Sumitomo Heavy Ind Ltd | 位置合わせ方法及び処理装置 |
| JP2006173038A (ja) * | 2004-12-20 | 2006-06-29 | Hitachi High-Technologies Corp | 荷電粒子線装置、試料像表示方法及びイメージシフト感度計測方法 |
| TWI290430B (en) * | 2005-02-02 | 2007-11-21 | Shimadzu Corp | Scanning electron beam device |
| JP2006108123A (ja) * | 2006-01-16 | 2006-04-20 | Hitachi Ltd | 荷電粒子線装置 |
-
2006
- 2006-09-27 JP JP2006261651A patent/JP5164355B2/ja active Active
-
2007
- 2007-08-08 US US11/889,057 patent/US7935925B2/en active Active
-
2011
- 2011-04-04 US US13/079,361 patent/US8338781B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11056310B2 (en) | 2017-01-12 | 2021-07-06 | Hitachi High-Tech Corporation | Charged-particle beam device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080073528A1 (en) | 2008-03-27 |
| US20110174975A1 (en) | 2011-07-21 |
| US8338781B2 (en) | 2012-12-25 |
| US7935925B2 (en) | 2011-05-03 |
| JP2008084626A (ja) | 2008-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5164355B2 (ja) | 荷電粒子ビームの走査方法及び荷電粒子線装置 | |
| JP5941704B2 (ja) | パターン寸法測定装置、及びコンピュータプログラム | |
| JP5241168B2 (ja) | 電子顕微鏡 | |
| US9202665B2 (en) | Charged particle beam apparatus for removing charges developed on a region of a sample | |
| US8026491B2 (en) | Charged particle beam apparatus and method for charged particle beam adjustment | |
| US20100163727A1 (en) | Methods of operating a nanoprober to electrically probe a device structure of an integrated circuit | |
| TWI592976B (zh) | Charged particle beam device and inspection method using the device | |
| JP2007187538A (ja) | 荷電粒子線装置及びそれを用いた画像取得方法 | |
| US11133148B2 (en) | Scanning electron microscope | |
| CN109298001B (zh) | 电子束成像模块、电子束检测设备及其图像采集方法 | |
| JP2007207688A (ja) | ミラー電子顕微鏡およびミラー電子顕微鏡を用いた検査装置 | |
| US20080272300A1 (en) | Charged particle beam apparatus | |
| JP5094282B2 (ja) | ローカル帯電分布精密計測方法及び装置 | |
| JP6454533B2 (ja) | 荷電粒子線装置 | |
| JP2006108123A (ja) | 荷電粒子線装置 | |
| JP4230968B2 (ja) | 荷電粒子線装置 | |
| JP2001052642A (ja) | 走査型電子顕微鏡及び微細パターン測定方法 | |
| JP4928987B2 (ja) | 荷電粒子線調整方法及び荷電粒子線装置 | |
| US8309922B2 (en) | Semiconductor inspection method and device that consider the effects of electron beams | |
| JP2006173038A (ja) | 荷電粒子線装置、試料像表示方法及びイメージシフト感度計測方法 | |
| JP5588944B2 (ja) | 走査型電子顕微鏡 | |
| JP3911407B2 (ja) | 荷電粒子線走査式装置 | |
| JP5218683B2 (ja) | 荷電粒子線装置 | |
| JP5174483B2 (ja) | 荷電粒子ビーム装置、及び試料の表面の帯電状態を知る方法 | |
| JP2009016361A (ja) | 荷電粒子線装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090916 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090916 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090916 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110908 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110913 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120403 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120604 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121218 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151228 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5164355 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |