JP5130716B2 - モータ制御装置および電気式動力舵取装置 - Google Patents
モータ制御装置および電気式動力舵取装置 Download PDFInfo
- Publication number
- JP5130716B2 JP5130716B2 JP2007001376A JP2007001376A JP5130716B2 JP 5130716 B2 JP5130716 B2 JP 5130716B2 JP 2007001376 A JP2007001376 A JP 2007001376A JP 2007001376 A JP2007001376 A JP 2007001376A JP 5130716 B2 JP5130716 B2 JP 5130716B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- current
- compensation
- command value
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/04—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for very low speeds
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/0003—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/05—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for damping motor oscillations, e.g. for reducing hunting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/50—Reduction of harmonics
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Ac Motors In General (AREA)
Description
<1 全体構成>
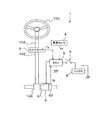
図1は、本発明の一実施形態に係る電気式動力舵取装置1の構成を、それに関連する車両構成と共に示す概略図である。この電気式動力舵取装置1は、操舵のための操作手段としてのハンドル(ステアリングホイール)100に一端が固着されるステアリングシャフト102と、そのステアリングシャフト102の他端に連結されたラックピニオン機構104と、ハンドル100の操作によってステアリングシャフト102に加えられる操舵トルクを検出するトルクセンサ3と、ハンドル操作(操舵操作)における運転者の負荷を軽減するための操舵補助力を発生させるブラシレスモータ6と、その操舵補助力をラック軸に伝達するボールねじ駆動部61と、ブラシレスモータ6のロータの回転位置を検出するレゾルバ等の位置検出センサ62と、車載バッテリ8からイグニションスイッチ9を介して電源の供給を受け、トルクセンサ3や車速センサ4、位置検出センサ62からのセンサ信号に基づきモータ6を駆動制御する電子制御ユニット(ECU)5とを備えている。
本実施形態におけるモータ6は、永久磁石からなる界磁としてのロータ(以下「回転界磁」ともいう)と、U相、V相およびW相の3相コイルからなるステータとから構成される正弦波駆動のブラシレスモータである。
i*u=I*sinθre ・・・(1a)
i*v=I*sin(θre−2π/3) ・・・(1b)
i*w=I*sin(θre−4π/3)=−i*u−i*v ・・・(1c)
ここで、i*uはu相電流指令値、i*vはv相電流指令値、i*wはw相電流指令値であり、θreは、u相コイルを基準として時計回りにとった回転界磁の角度(「電気角」と呼ばれる)である。ただし、ロータの機械角をθm、極数を2pとしたとき、電気角はθre=p・θmとなる。
i*d=0 ・・・(2a)
i*q=−√(3/2)I* ・・・(2b)
ここで、i*dはd軸電流指令値、i*qはq軸電流指令値である。
id=√2{ivsinθre−iusin(θre−2π/3)}・・・(3a)
iq=√2{ivcosθre−iucos(θre−2π/3)}・・・(3b)
ここで、iuはu相電流検出値、ivはv相電流検出値であり、θreは上記電気角である。
本実施形態では、電気式動力舵取装置1における制御装置であるECU5において、モータ6に対する上記のようなフィードバック制御が行われる。図2は、このECU5の電気的構成を示すブロック図である。このECU5は、位相補償器112と、マイクロコンピュータ(以下「マイコン」と略記する)10と、モータ駆動部とから構成される。
i*d=i*d0+Δid ・・・(4a)
i*q=i*q0+Δiq ・・・(4b)
である。これらの式(4a)(4b)は、適切な操舵補助力を得るためにモータ6に流すべき電流の目標電流指令値が、トルクリップルの抑制のためにd軸電流補償値Δidおよびq軸電流補償値Δiqに基づき補正されることを示している。
v*d=Kp{ed+(1/Ti)∫eddt} ・・・(5a)
v*q=Kp{eq+(1/Ti)∫eqdt} ・・・(5b)
ここで、Kpは比例ゲインであり、Tiは積分時間である。
v*u=√(2/3){v*dcosθre−v*qsinθre} ・・・(6a)
v*v=√(2/3){v*dcos(θre−2π/3)−v*qsin(θre−2π/3)}・(6b)
v*w=−v*u−v*v ・・・(6c)
3相PWM変調部150は、上記のようにして算出された各相電圧指令値v*u、v*v、v*wにそれぞれ応じたデューティ比のPWM信号Su、Sv、Swを生成する。
上記のように本実施形態では、操舵トルクや車速に応じて適切な操舵補助が行われるようにモータ電流の目標電流指令値が設定され、その目標電流指令値がトルクリップルの補償等のために補正され、この補正後の目標値(d軸電流指令値i*dおよびq軸電流指令値i*q)の電流がモータ6に流れるようにフィードバック制御が行われる。ECU5のうちこのような電流制御を行う部分(以下「電流制御部」という)200は、図2において点線で囲まれた部分に相当する。本実施形態では、モータ6の制御手段であるこの電流制御部200のうち、モータ駆動部に相当する部分はハードウェア的に実現されており、モータ駆動部に相当する部分以外は、既述のように、マイコン10が所定のプログラムを実行することによりソフトウェア的に実現されている。そして、この電流制御部200とモータ6および位置検出センサ62とにより、フィードバックループを有する電流制御系が構成される。
既述のように、トルクリップルの発生を抑制するためにモータ6に流すべき補償電流の指令値、すなわちd軸電流補償値Δidおよびq軸電流補償値Δiqは、トルクリップル補償部118によって演算される。本実施形態では、このトルクリップル補償部118も、マイコン10が所定のプログラムを実行することによりソフトウェア的に実現されている。図3は、このトルクリップル補償部118の機能的構成を示すブロック図である。このトルクリップル補償部118は、微分器12と、周波数算出部14と、ゲイン・位相決定部16と、減算器18と、基本補償電流決定部20と、振幅決定部22と、修正率算出部24と、操舵速度ゲイン決定部25と、2個の乗算器26,28とを備えており、微分器12および減算器18には、電気角θreを示す信号が入力され、振幅決定部22には、q軸基本電流指令値i*q0が入力される。
f=S・ωre/(2π) ・・・(7)
ここで、Sはモータ6のスロット数である。
iu={(e0u−e0v)+(e0u−e0w)}T
/{(e0u−e0v)2+(e0u−e0w)2+(e0w−e0v)2}・・・(8a)
iv={T−(e0u−e0w)iu}/(e0v−e0w) ・・・(8b)
iw={T−(e0u−e0v)iu}/(e0w−e0v) ・・・(8c)
id=√2{ivsinθ−iusin(θ−2π/3)} ・・・(9a)
iq=√2{ivcosθ−iucos(θ−2π/3)} ・・・(9b)
ただし、θは電気角である。
このように本実施形態に係る電気式動力舵取装置1では、トルクリップル抑制のための補償電流の指令値の設定において、モータ負荷に相当する物理量であるq軸基本電流指令値i*q0に比例したq軸電流基本補償値Δiq1およびd軸電流基本補償値Δid1が算出されるだけでなく、電流制御系の周波数特性によるゲイン低下が補われるように、ゲイン・位相決定部16および修正率算出部24によって得られた修正率Rmがq軸電流基本補償値Δiq1およびd軸電流基本補償値Δid1に乗算される。そして、この乗算結果であるq軸電流補償値Δiqおよびd軸電流補償値Δidがトルクリップル抑制のための補償電流の指令値として使用される。したがって、運転状況に応じてモータ6の回転速度が変化すると、q軸電流補償値Δiqおよびd軸電流補償値Δidによって示される指令値としての補償電流の振幅が回転速度の変化に応じて修正される。さらに上記実施形態では、電流制御系の周波数特性による位相遅れが補われるように、ゲイン・位相決定部16によって求められた位相差Δθe(負値)に応じて電気角θreが修正される。そして、その結果得られる修正電気角θmreに対応するq軸電流単位補償値Δiq0およびd軸電流単位補償値Δid0が補償電流マップ20aから求められ、これらに基づき、上記のq軸電流補償値Δiqおよびd軸電流補償値Δidが決定される。
なお、本発明は上記実施形態に限定されるものではなく、以下のように具体化してもよく、その場合でも、上記実施形態と同等もしくはそれ以上の作用・効果が得られる。
(1)上記実施形態では、電気式動力舵取装置1の駆動源として3相ブラシレスモータ6が使用されているが、3相以外の相数のブラシレスモータを使用した場合においても、上記と同様の構成により同様の効果が得られる。
(2)操舵速度ゲインマップ25aは、図7に示すように、ロータ角速度ωreが第2の閾値ω2(第1の閾値ω1の90%)以上でない場合には操舵速度ゲインGω=1に設定し、ロータ角速度ωreが第2の閾値ω2以上でありかつ第1の閾値ω1以上でない場合にはロータ角速度ωreが速くなるほど操舵速度ゲインGωを1から0(ゼロ)にかけて減少させるように設定することに限らず、操舵状況等にあわせて上記第2の閾値ω2を状況に応じて適宜変更するように設定してもよい。これにより、電流補償値Δid、Δiqを適切に演算することができる。
5…電子制御ユニット(ECU)
6…ブラシレスモータ
10…マイクロコンピュータ(モータ制御装置)
12…微分器(回転速度検出手段)
14…周波数算出部
16…ゲイン・位相決定部
16a…周波数特性マップ
18…減算器
20…基本補償電流決定部
20a…補償電流マップ
22…振幅決定部
24…修正率算出部
25…操舵速度ゲイン決定部
25a…操舵速度ゲインマップ
26,28…乗算器
62…位置検出センサ
114…目標電流演算部
118…トルクリップル補償部(補償電流演算手段)
121,122…加算器(補正手段)
123,124…減算器
126…d軸電流PI制御部
128…q軸電流PI制御部
150…3相PWM変調部
152…モータ駆動回路
162…ロータ角度位置検出器(回転角検出手段)
200…電流制御部(制御手段)
Ts…操舵トルク信号
i*d0…d軸基本電流指令値(目標電流指令値)
i*q0…q軸基本電流指令値(目標電流指令値)
Δid…d軸電流補償値(補償電流指令値)
Δiq…q軸電流補償値(補償電流指令値)
i*d…d軸電流指令値(補正後の所定の目標電流指令値)
i*q…q軸電流指令値(補正後の所定の目標電流指令値)
id…d軸電流検出値
iq…q軸電流検出値
ed…d軸電流偏差
eq…q軸電流偏差
θre…電気角(モータの回転角)
ω1…第1の閾値
ω2…第2の閾値
ωre…ロータ角速度(モータの回転速度)
Δθe…電流制御系の位相差
Gf…電流制御系のゲイン
Gω…操舵速度ゲイン
θmre…修正電気角
Rm…修正率
Claims (3)
- モータの回転角を検出する回転角検出手段と、
前記モータの回転速度を検出する回転速度検出手段と、
前記モータにおける誘導起電力波形の歪みに起因するトルクリップルの発生を抑えるために当該モータに流すべき補償電流指令値を、前記回転角および所定の目標電流指令値に基づき演算する補償電流演算手段と、
前記補償電流指令値に基づき前記所定の目標電流指令値を補正する補正手段と、
前記補正手段によって補正された後の前記所定の目標電流指令値に対応する電流が前記モータに流れるように当該モータに対してフィードバック制御を行い、当該フィードバック制御による前記モータの電流制御系を構成する制御手段と、
を備え、前記補償電流演算手段の演算周期が前記制御手段の制御周期よりも長いモータ制御装置において、
前記補正手段による補正後の前記所定の目標電流指令値に基づき前記制御手段により制御された前記モータのトルクリップルが、前記補正手段による補正前の前記所定の目標電流指令値に基づき前記制御手段により制御された当該モータのトルクリップルに等しくなるときにおける、前記モータの前記回転速度を第1の閾値とした場合、
前記補償電流演算手段は、前記回転速度が前記第1の閾値以上であるときには、前記補償電流指令値を0(ゼロ)にすることを特徴とするモータ制御装置。 - 前記第1の閾値よりも遅い所定の回転速度を第2の閾値とした場合、
前記補償電流演算手段は、前記回転速度が前記第2の閾値以上でありかつ前記第1の閾値以上でないときには前記補償電流指令値を前記回転速度が速くなるほど減少させるように演算し、前記回転速度が前記第2の閾値以上でないときには前記補償電流指令値を前記トルクリップルの発生を抑えるために当該モータに流すべき電流指令値にするように演算することを特徴とする請求項1記載のモータ制御装置。 - 前記所定の目標電流指令値は、車両操舵のための操作に応じて決定される電流指令値であって、この操舵に応じた操舵補助力をモータにより発生させて操舵を補助する電気式動力舵取装置において、
請求項1または2に記載のモータ制御装置によって、前記モータの駆動制御を行うことを特徴とする電気式動力舵取装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007001376A JP5130716B2 (ja) | 2007-01-09 | 2007-01-09 | モータ制御装置および電気式動力舵取装置 |
| US11/966,010 US8150580B2 (en) | 2007-01-09 | 2007-12-28 | Motor controller and electric power steering system |
| EP08150095.1A EP1944861A3 (en) | 2007-01-09 | 2008-01-08 | Motor controller and electric power steering system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007001376A JP5130716B2 (ja) | 2007-01-09 | 2007-01-09 | モータ制御装置および電気式動力舵取装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008172866A JP2008172866A (ja) | 2008-07-24 |
| JP5130716B2 true JP5130716B2 (ja) | 2013-01-30 |
Family
ID=39367599
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007001376A Expired - Fee Related JP5130716B2 (ja) | 2007-01-09 | 2007-01-09 | モータ制御装置および電気式動力舵取装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8150580B2 (ja) |
| EP (1) | EP1944861A3 (ja) |
| JP (1) | JP5130716B2 (ja) |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005035333A1 (ja) * | 2003-10-07 | 2005-04-21 | Jtekt Corporation | 電動パワーステアリング装置 |
| KR100999139B1 (ko) * | 2007-12-13 | 2010-12-08 | 기아자동차주식회사 | 전동식 파워 스티어링의 제어방법 |
| JP5157429B2 (ja) * | 2007-12-27 | 2013-03-06 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| CN102349231B (zh) * | 2009-03-09 | 2014-05-14 | 日本电气株式会社 | 三相电动机控制器、三相电动机系统、三相电动机控制方法和程序 |
| US8269438B2 (en) * | 2009-08-07 | 2012-09-18 | Lg Electronics Inc. | Apparatus for driving motor of air conditioner and method for driving the same |
| CN102025312B (zh) * | 2009-09-16 | 2014-01-29 | 株式会社东芝 | 马达控制元件及电气设备 |
| KR101290879B1 (ko) * | 2009-12-04 | 2013-07-29 | 주식회사 만도 | 각도 제어 방법, 각도 제어 장치 및 이를 이용한 자동 주차 시스템 |
| JP5467852B2 (ja) * | 2009-12-11 | 2014-04-09 | 株式会社ショーワ | 電動パワーステアリング装置、電動パワーステアリング装置の制御方法およびプログラム |
| US8657585B2 (en) * | 2010-02-08 | 2014-02-25 | Lg Electronics Inc. | Apparatus for driving compressor of air conditioner and method for driving the same |
| FR2973607B1 (fr) | 2011-03-30 | 2014-01-10 | Renault Sa | Systeme et procede de commande d'un moteur electrique a phases multiples prenant en compte les oscillations de courant. |
| AT512002B1 (de) | 2011-09-15 | 2014-02-15 | Xylem Ip Holdings Llc | Motorregelung für einen synchronmotor |
| KR101606231B1 (ko) * | 2012-07-26 | 2016-04-01 | 주식회사 만도 | 전동식 조향 장치 및 그의 제어방법 |
| US9663139B2 (en) | 2013-02-26 | 2017-05-30 | Steering Solutions Ip Holding Corporation | Electric motor feedforward control utilizing dynamic motor model |
| US9136785B2 (en) * | 2013-03-12 | 2015-09-15 | Steering Solutions Ip Holding Corporation | Motor control system to compensate for torque ripple |
| US9143081B2 (en) | 2013-03-14 | 2015-09-22 | Steering Solutions Ip Holding Corporation | Motor control system having bandwidth compensation |
| FR3013535B1 (fr) * | 2013-11-15 | 2015-12-18 | Renault Sas | Procede et systeme de commande d'une machine electrique triphasee de vehicule automobile alimentee par des tensions hachees. |
| JP5986979B2 (ja) * | 2013-11-28 | 2016-09-06 | 京セラドキュメントソリューションズ株式会社 | モーター制御装置、及びこれを備える画像形成装置 |
| US10389289B2 (en) | 2014-02-06 | 2019-08-20 | Steering Solutions Ip Holding Corporation | Generating motor control reference signal with control voltage budget |
| US10003285B2 (en) | 2014-06-23 | 2018-06-19 | Steering Solutions Ip Holding Corporation | Decoupling current control utilizing direct plant modification in electric power steering system |
| US9577561B2 (en) * | 2014-07-01 | 2017-02-21 | Guangdong Meizhi Compressor Co., Ltd. | Method for suppressing a speed fluctuation, a control apparatus and a compressor control system |
| US9809247B2 (en) | 2015-01-30 | 2017-11-07 | Steering Solutions Ip Holding Corporation | Motor control current sensor loss of assist mitigation for electric power steering |
| US9780703B2 (en) * | 2015-08-12 | 2017-10-03 | Stmicroelectronics S.R.L. | Power supply for multiphase motor providing recirculation compensation features and related methods |
| JP6519457B2 (ja) * | 2015-11-30 | 2019-05-29 | オムロン株式会社 | 補正装置、補正装置の制御方法、情報処理プログラム、および記録媒体 |
| JP6521881B2 (ja) * | 2016-02-05 | 2019-05-29 | トヨタ自動車株式会社 | 駆動装置 |
| US10090788B2 (en) * | 2016-03-03 | 2018-10-02 | Robert Bosch Gmbh | Optimal torque ripple reduction through current shaping |
| US10135368B2 (en) | 2016-10-01 | 2018-11-20 | Steering Solutions Ip Holding Corporation | Torque ripple cancellation algorithm involving supply voltage limit constraint |
| WO2018147371A1 (ja) * | 2017-02-09 | 2018-08-16 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP6874517B2 (ja) * | 2017-05-12 | 2021-05-19 | 株式会社デンソー | 同期モータのベクトル制御を行うモータ制御装置 |
| CN107612448B (zh) * | 2017-08-22 | 2020-04-14 | 北京合康新能科技股份有限公司 | 一种永磁同步曳引电梯系统的无扰动转矩补偿方法 |
| EP3709501B1 (en) * | 2017-11-07 | 2022-08-31 | Mitsubishi Electric Corporation | Electric motor control device and electric power steering device |
| JPWO2019163552A1 (ja) * | 2018-02-20 | 2021-03-04 | 日本電産株式会社 | モータ制御システム、およびパワーステアリングシステム |
| US11496077B2 (en) * | 2018-08-07 | 2022-11-08 | Nidec Corporation | Drive controller, drive unit, and power steering |
| JP7035922B2 (ja) * | 2018-09-07 | 2022-03-15 | 株式会社デンソー | 3相回転機の制御装置 |
| JP7236248B2 (ja) * | 2018-10-29 | 2023-03-09 | 株式会社ジェイテクト | モータ制御装置 |
| KR102119413B1 (ko) * | 2019-02-21 | 2020-06-05 | 현대모비스 주식회사 | 토크 리플 보상 장치 및 방법 |
| JP7256349B2 (ja) * | 2019-06-06 | 2023-04-12 | 有限会社シー・アンド・エス国際研究所 | 同期電動機の駆動制御装置 |
| CN112994551B (zh) * | 2021-03-10 | 2022-07-08 | 深圳市微秒控制技术有限公司 | 一种伺服电机转矩补偿方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001103783A (ja) * | 1999-09-30 | 2001-04-13 | Toyoda Mach Works Ltd | モータ制御装置 |
| JP3637897B2 (ja) * | 2002-02-28 | 2005-04-13 | 三菱電機株式会社 | 同期電動機駆動装置、インバータ装置、同期電動機の制御方法 |
| AU2003289041A1 (en) * | 2002-12-12 | 2004-06-30 | Nsk Ltd. | Motor drive-controlling device and electric power-steering device |
| JP4033030B2 (ja) * | 2003-04-21 | 2008-01-16 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4581574B2 (ja) * | 2004-09-08 | 2010-11-17 | 株式会社ジェイテクト | モータ制御装置及び電動パワーステアリング装置 |
| JP4634193B2 (ja) * | 2005-03-14 | 2011-02-16 | 日立オートモティブシステムズ株式会社 | 同期電動機 |
| JP2006262668A (ja) * | 2005-03-18 | 2006-09-28 | Honda Motor Co Ltd | 電動パワーステアリング装置 |
| JP4496137B2 (ja) | 2005-06-22 | 2010-07-07 | 株式会社東海理化電機製作所 | 車両用操舵装置 |
-
2007
- 2007-01-09 JP JP2007001376A patent/JP5130716B2/ja not_active Expired - Fee Related
- 2007-12-28 US US11/966,010 patent/US8150580B2/en not_active Expired - Fee Related
-
2008
- 2008-01-08 EP EP08150095.1A patent/EP1944861A3/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| EP1944861A3 (en) | 2017-03-01 |
| US8150580B2 (en) | 2012-04-03 |
| JP2008172866A (ja) | 2008-07-24 |
| EP1944861A2 (en) | 2008-07-16 |
| US20080167779A1 (en) | 2008-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5130716B2 (ja) | モータ制御装置および電気式動力舵取装置 | |
| JP4033030B2 (ja) | 電動パワーステアリング装置 | |
| JP4736805B2 (ja) | 電動パワーステアリング装置 | |
| JP5168448B2 (ja) | モータ制御装置及び電動パワーステアリング装置 | |
| JP5417195B2 (ja) | 永久磁石モータのトルクリプル抑制制御装置、電動パワーステアリングシステム | |
| JP5024040B2 (ja) | 電動パワーステアリング装置の制御方法及び装置 | |
| JP4912874B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| WO2009123113A1 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| CN101981808A (zh) | 电动机控制装置 | |
| JP5092760B2 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| JP2009017715A (ja) | モータ制御装置及びこれを使用した電動パワーステアリング装置 | |
| JP4604493B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| EP2066018A2 (en) | Motor control device | |
| JP5397664B2 (ja) | モータ制御装置 | |
| JP2011066947A (ja) | モータ制御装置 | |
| JP2010273400A (ja) | 誘導電動機制御装置 | |
| JP4680754B2 (ja) | Dcブラシレスモータのロータ角度推定方法及びdcブラシレスモータの制御装置 | |
| JP2008068666A (ja) | 電動パワーステアリング装置 | |
| JP5444697B2 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| JP2008155683A (ja) | 電気式動力舵取装置 | |
| JP2009136035A (ja) | モータ制御装置 | |
| JP5459564B2 (ja) | モータ制御装置 | |
| JP2022048802A (ja) | モータ制御装置及びマップの設定方法 | |
| JP5482625B2 (ja) | 回転機の制御装置 | |
| JP2009207247A (ja) | 電動機制御装置及びパワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111206 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121009 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121022 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151116 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |