JP5114869B2 - ステアリング装置 - Google Patents
ステアリング装置 Download PDFInfo
- Publication number
- JP5114869B2 JP5114869B2 JP2006148175A JP2006148175A JP5114869B2 JP 5114869 B2 JP5114869 B2 JP 5114869B2 JP 2006148175 A JP2006148175 A JP 2006148175A JP 2006148175 A JP2006148175 A JP 2006148175A JP 5114869 B2 JP5114869 B2 JP 5114869B2
- Authority
- JP
- Japan
- Prior art keywords
- feed screw
- feed
- steering
- shaft
- column
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Steering Controls (AREA)
- Transmission Devices (AREA)
Description
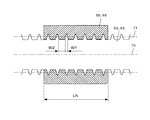
H=(D1−D2)/2=(12.4−10.4)/2=1.0mm
となる。
L=L1+L2=P+H*tanθ*2=2.0+1.0*tan(15°)*2
=2.536mm
となる。
L1=L*(τ2*D1*π)/((τ1*D2*π)+(τ2*D1*π))
=2.536*(95*12.4*π)/((400*10.4*π)+
(95*12.4*π))
=0.560mm
となる。
L2=L*(τ1*D2*π)/((τ1*D2*π)+(τ2*D1*π))
=2.536*(400*10.4*π)/((400*10.4*π)+
(95*12.4*π))
=1.976mm
となる。
W1=L1−H*tanθ=0.560−1.0*tan(15°)
=0.292mm
となる。
W2=L2−H*tanθ=1.976−1.0*tan(15°)
=1.708mm
となる。
102 ステアリングシャフト
102A 上部ステアリングシャフト
102B 下部ステアリングシャフト
103 ステアリングホイール
104 ユニバーサルジョイント
105 中間シャフト
106 ユニバーサルジョイント
107 ステアリングギヤ
108 タイロッド
11 車体
2 車体取付けブラケット
21 上板
3 ロアーコラム
31 ブラケット
32 チルト中心軸
4 アッパーコラム
41 フランジ
5 テレスコ駆動機構
51 テレスコ用モータ
52 ウォーム
53 送りねじ軸
54 ウォームホイール
55 送りナット
56A、56B 軸受
6 チルト駆動機構
61 チルト用モータ
62 ウォーム
63 送りねじ軸
631、632 軸受
64 ウォームホイール
65 送りナット
651 チルト駆動力伝達突起
66 係合孔
70 ねじの軸線
71 有効径
Claims (2)
- 車体後方側にステアリングホイールが装着されるステアリングシャフト、
車体取付けブラケットを介して車体に取り付けられ、上記ステアリングシャフトを回転可能に軸支するとともに、チルト中心軸を支点とするチルト位置調整、または、上記ステアリングシャフトの中心軸線に沿ったテレスコピック位置調整が可能なコラム、
上記コラムまたは車体取付けブラケットに設けられた電動アクチュエータ、
上記電動アクチュエータによって駆動され、互いに螺合する金属製の送りねじ軸と合成樹脂製の送りナットの相対移動で、上記コラムのチルト運動、または、テレスコピック運動を行う送りねじ機構を備えたステアリング装置において、
上記送りねじ機構の送りナットのねじ山の幅と送りねじ軸のねじ山の幅の比を、送りナットの材料の剪断強度と送りねじ軸の材料の剪断強度の各逆数に比例して形成し、送りナットと送りねじ軸との螺合位置におけるねじ山の耐荷重を同等にしたこと
を特徴とするステアリング装置。 - 請求項1に記載されたステアリング装置において、
上記送りねじ軸が転造ねじであること
を特徴とするステアリング装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006148175A JP5114869B2 (ja) | 2006-05-29 | 2006-05-29 | ステアリング装置 |
| EP07737990A EP2003370A2 (en) | 2006-03-08 | 2007-03-07 | Feed screw mechanism and steering device |
| US11/910,018 US20090266187A1 (en) | 2006-03-08 | 2007-03-07 | Steering apparatus |
| PCT/JP2007/054477 WO2007102558A1 (ja) | 2006-03-08 | 2007-03-07 | 送りねじ機構及びステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006148175A JP5114869B2 (ja) | 2006-05-29 | 2006-05-29 | ステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007314118A JP2007314118A (ja) | 2007-12-06 |
| JP5114869B2 true JP5114869B2 (ja) | 2013-01-09 |
Family
ID=38848372
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006148175A Active JP5114869B2 (ja) | 2006-03-08 | 2006-05-29 | ステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5114869B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012189099A (ja) * | 2011-03-09 | 2012-10-04 | Nidec Tosok Corp | 電動機の送りねじ機構 |
| JP2013019456A (ja) * | 2011-07-11 | 2013-01-31 | Yazaki Corp | インサートカラー |
| JP2018030385A (ja) * | 2016-08-22 | 2018-03-01 | アイシン精機株式会社 | 車両のステアリング装置 |
| WO2023023244A1 (en) * | 2021-08-18 | 2023-02-23 | Milwaukee Electric Tool Corporation | Clutch assembly for a power tool |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1148987A (ja) * | 1997-08-05 | 1999-02-23 | Asmo Co Ltd | ステアリング装置 |
| JP2000238647A (ja) * | 1998-12-25 | 2000-09-05 | Nsk Ltd | 電動式ステアリングコラム装置 |
| JP2000280916A (ja) * | 1999-03-30 | 2000-10-10 | Aisin Seiki Co Ltd | スライダ機構 |
| JP3852268B2 (ja) * | 2000-05-01 | 2006-11-29 | 日本精工株式会社 | 電動位置調整式ステアリング装置及びそのネジギヤの加工方法 |
| JP2005069430A (ja) * | 2003-08-27 | 2005-03-17 | Kokuei Kogyo:Kk | 直線移動装置 |
-
2006
- 2006-05-29 JP JP2006148175A patent/JP5114869B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007314118A (ja) | 2007-12-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103857581B (zh) | 转向盘的电动位置调节装置 | |
| JP5076908B2 (ja) | ステアリングコラム装置 | |
| JP4325403B2 (ja) | 電動式ステアリングコラム装置 | |
| JP4894413B2 (ja) | ステアリング装置 | |
| CN106458243A (zh) | 用于机动车辆的转向管柱、螺杆和轴螺母 | |
| US20090031844A1 (en) | Tilt-type steering apparatus | |
| WO2008001721A1 (en) | Steering device | |
| JP6322133B2 (ja) | アクチュエータ、及び車両用転舵装置 | |
| JP5338844B2 (ja) | 電動式ステアリング装置 | |
| JP2011046309A (ja) | 車両用操舵装置 | |
| JP5114869B2 (ja) | ステアリング装置 | |
| JP4483459B2 (ja) | 電動式ステアリングコラム装置 | |
| JP2007161082A (ja) | 電動式パワーステアリング装置 | |
| JP5151154B2 (ja) | ステアリング装置 | |
| JP2008057595A (ja) | ステアリング装置 | |
| JP5135773B2 (ja) | ステアリング装置 | |
| JP5076383B2 (ja) | ステアリング装置 | |
| JP6697804B2 (ja) | ステアリングシャフト | |
| JP7790582B2 (ja) | 操舵装置 | |
| JP5055873B2 (ja) | ステアリング装置 | |
| WO2012086338A1 (ja) | 車両用操舵装置 | |
| JP2010058599A (ja) | ラック軸支持装置および車両用操舵装置 | |
| JP5061560B2 (ja) | ステアリング装置 | |
| WO2025150212A1 (ja) | ステアリング装置 | |
| JP2008087638A (ja) | 電動ステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120123 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120918 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121001 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5114869 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151026 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |