JP5080657B2 - 走査電子顕微鏡 - Google Patents
走査電子顕微鏡 Download PDFInfo
- Publication number
- JP5080657B2 JP5080657B2 JP2010542821A JP2010542821A JP5080657B2 JP 5080657 B2 JP5080657 B2 JP 5080657B2 JP 2010542821 A JP2010542821 A JP 2010542821A JP 2010542821 A JP2010542821 A JP 2010542821A JP 5080657 B2 JP5080657 B2 JP 5080657B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- electron microscope
- scanning electron
- frame
- field
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B15/00—Measuring arrangements characterised by the use of electromagnetic waves or particle radiation, e.g. by the use of microwaves, X-rays, gamma rays or electrons
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/22—Optical, image processing or photographic arrangements associated with the tube
- H01J37/222—Image processing arrangements associated with the tube
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Length-Measuring Devices Using Wave Or Particle Radiation (AREA)
Description
しかし、特許文献1で開示された画像(フレーム画像)間の像の移動量を補正する方法では、高倍率(特に、観察視野1ミクロン程度以下で顕著)で画像ぼけが生じ、鮮明な画像やそれに伴う測長精度が十分えられないことが判明した。
なお、フレーム画像、フィールド画像の定義については後述する。
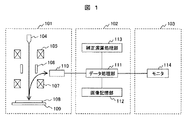
図1は、ドリフト補正機能を備えた走査電子顕微鏡の一実施形態を示している。この装置は、試料観察時に像が時間の経過とともに移動する現象である像ドリフトが生じても、ドリフト量を算出して補正を行うことで鮮明なフレーム画像を得ることを可能とするものである。前記において、「ドリフト量」とは、本実施例では、図2に示したフレーム画像間のパターンの位置ずれ量(移動量)及びフィールド画像間での移動量である。
ここでは、代表的な走査方法の一つであるインターレス走査を用いた場合の画像の分類について説明する。簡単のため、画像のライン数は6にしている。インターレス走査とは、画像の奇数ラインを上から順番に走査した後に偶数ラインを上から順番に走査して1枚の画像を形成する手法である。
まず、ステージ(試料台)を動かして測定点に移動し、ステージの位置を固定した状態で、同一視野において複数のフィールド画像で構成される1フレームの画像を連続して複数枚取得する。得られた複数のフレーム画像はそれぞれ画像記憶部112に保存される(S401)。
次いで、補正演算処理部113を用いて、1フレーム目の画像を基準として、2フレーム目以降の画像間のドリフト量を算出する(S402)。
次いで、補正演算処理部113を用いて、S402で算出されたフレーム画像間のドリフト量をもとに、フレーム画像を構成するフィールド画像間のドリフト量に換算する(S403)。
次いで、補正演算処理部113を用いて、S403の処理で算出したドリフト量だけフィールド画像をシフトさせる(S404)。
次いで、ドリフト量だけシフトされたフィールド画像を基準のフィールド画像に重ね合わせ、新たなフレーム画像を作成する(S405)。なお、基準のフィールド画像については後述する。
次いで、S405で作成された複数フレーム画像をモニタ114に表示する(S406)。
その後、S406でモニタ114に表示された複数フレーム画像を用いてパターンの寸法算出を行う(S407)。
図3で図示したように、インターレス走査時には1フレームの画像は2フィールドの画像(奇数フィールド画像と偶数フィールド画像)から構成されている。図6はフィールド間のドリフト量算出方法を示したものである。まず、ステップS402によりフレーム間のドリフト量を算出し、図5(b)と同様に、縦軸をドリフト量、横軸を画像取得開始からの時間としたグラフを作成する。次に、プロットした点の間を直線でつなぎ、二点の中間に新たにデータ点を作成してプロットする(図中では○で表示)。上記の工程を経て得られたグラフは図6となる。
D2,2=D2+(D3−D2)/2・・・・(1)
から算出することができる。
DN,K=DN+(DN+1−DN)*(K−1)/M・・・・(2)
から算出される。1フレームの画像取得時間は十分短いので、フレーム間のドリフト量は前後のフレームのドリフト量を用いて直線近似したが、スプライン補間や複数フレームのデータ点を利用して関係式を算出して、フレーム間のデータ点を補間しても良い。
更に、本実施例において、フィールド画像を補正し、積算して新たなフレーム画像を作成し、それを用いてパターン寸法をデータ処理部にて算出することにより、パターン寸法の0.5%以内の誤差で測定できることがわかった。
まず、ステージを動かして測定点に移動し、同一視野において1フレームの画像を連続して複数枚取得する。得られたフレーム画像は画像記憶部112に保存される(S1001)。
補正演算処理部113を用いて、フレーム画像を縮小化してS/N比を向上させる(S1002)。
補正演算処理部113を用いて、観察対象のパターンに対応する設計データであるCAD(Computer Aided Design)データ、あるいは観察により得られたフレーム画像のデータを用いてパターンが一次元か二次元か判定し、解析する手法を決定する(ドリフト量の算出方向を決める)(S1003)。
補正演算処理部113を用いて、1フレーム目の画像を基準とした2フレーム目以降の画像のドリフト量を算出する(S1004)。
補正演算処理部113を用いて、S1004で算出されたフレーム間のドリフト量をもとに、フィールド間のドリフト量に換算する(S1005)。
補正演算処理部113を用いて、S1005の処理で算出したドリフト量だけフィールド画像をシフトさせる(S1006)。次に、基準のフィールド画像に重ね合わせて積算
し、複数フレームの画像を作成する(S1007)。
S1007で作成された複数フレーム画像をモニタ114に表示する(S1008)。
その後、S1008でモニタ114に表示された複数フレーム画像を用いてパターンの寸法算出を行う(S1009)。
まず、ステージを動かして測定点に移動し、同一視野において1フレームの画像を連続して複数枚取得する。得られたフレーム画像は画像記憶部112に保存される(S1201)。
補正演算処理部113を用いて、前記画像記憶部112に保存された複数のフレーム画像を、数枚毎のグループに分け、グループ毎にフレームの画像を重ね合わせて、新たに複数フレームの画像を作成する(S1202)。
補正演算処理部113を用いて、1枚目のフレーム画像を基準として、2枚目以降のフレーム画像のドリフト量を算出する。(S1203)。
補正演算処理部113を用いて、S1203で算出された複数フレーム画像間のドリフト量をもとに、フレーム画像間のドリフト量を算出する(S1204)。
補正演算処理部113を用いて、S1204で算出されたフレーム画像間のドリフト量をもとに、フィールド画像間のドリフト量に換算する(S1205)。
補正演算処理部113を用いて、S1205の処理で算出したドリフト量だけフィールド画像をシフトさせる(S1206)。次に、基準のフィールド画像に重ね合わせて積算
し、複数フレームの画像を作成する(S1207)。
S1207で作成された複数フレーム画像をモニタ114に表示する(S1208)。
その後、S1208でモニタ114に表示された複数フレーム画像を用いてパターンの寸法算出を行う(S1209)。
Claims (14)
- 電子線を走査して試料に照射し、試料から放出される信号を検出して画像を形成する走査電子顕微鏡において、
試料の観察視野を一度走査して得られるフレーム画像を複数枚保存する画像記憶部と、前記フレーム画像間及び前記フレーム画像を構成するフィールド画像間のドリフト量を算出する補正演算処理部と、前記フィールド画像間のドリフト量に基づき前記フィールド画像をドリフト補正し、重ね合わせるデータ処理部とを有することを特徴とする走査電子顕微鏡。 - 請求項1に記載の走査電子顕微鏡において、
前記フレーム画像間のドリフト量は、前記フレーム画像同士を演算処理して算出されることを特徴とする走査電子顕微鏡。 - 請求項1または2に記載の走査電子顕微鏡において、
前記補正演算処理部は、位相相関法を用いてドリフト量を算出することを特徴とする走査電子顕微鏡。 - 請求項1乃至3のいずれか一に記載の走査電子顕微鏡において、
前記フィールド画像間のドリフト量は、前記フレーム画像間のドリフト量に基づき算出されることを特徴とする走査電子顕微鏡。 - 請求項1乃至4のいずれか一に記載の走査電子顕微鏡において、
前記フレーム画像を構成する前記フィールド画像の数は、任意に設定できることを特徴とする走査電子顕微鏡。 - 請求項1乃至5のいずれか一に記載の走査電子顕微鏡において、
前記補正演算処理部は、前記フレーム画像を縮小する機能を有することを特徴とする走査電子顕微鏡。 - 請求項1乃至6のいずれか一に記載の走査電子顕微鏡において、
前記補正演算処理部は、前記フレーム画像のデータを用いて前記観察視野内のパターンが一次元パターンか二次元パターンかを判定する機能を有することを特徴とする走査電子顕微鏡。 - 請求項1乃至6のいずれか一に記載の走査電子顕微鏡において、
前記補正演算処理部は、観察対象パターンに対応するCADデータを用いて前記観察視野内のパターンが一次元パターンか二次元パターンかを判定する機能を有することを特徴とする走査電子顕微鏡。 - 請求項1乃至8のいずれか一に記載の走査電子顕微鏡において、
前記フィールド画像は、ラスタ走査で得られることを特徴とする走査電子顕微鏡。 - 請求項1乃至9のいずれか一に記載の走査電子顕微鏡において、
前記フィールド画像間のドリフトの補正が、1つもしくは複数の走査ライン毎に行われることを特徴とする走査電子顕微鏡。 - 請求項1乃至10のいずれか一に記載の走査電子顕微鏡において、
前記フレーム画像間のドリフト量は、前記画像記憶部に保存された複数枚のフレーム画像を数枚ごとのグループに分け、グループごとにそれぞれ積算して新たな複数のフレーム画像とし、前記新たな複数のフレーム画像を用いて算出されることを特徴とする走査電子顕微鏡。 - 電子線源と、
前記電子線源から放出される電子を走査する偏向器と、
試料が載置される試料台と、
前記電子が前記試料台上の試料に照射されることにより、前記試料から放出される信号に基づき画像を表示する表示部とを有する走査電子顕微鏡であって、
前記電子が前記試料の観察すべき領域である観察視野に照射されることにより得られる複数枚のフレーム画像を保存する画像記憶部と、
前記複数枚のフレーム画像間のドリフト量、及び前記フレーム画像を構成する複数のフィールド画像間のドリフト量を算出する補正演算処理部と、
前記フィールド画像間のドリフト量に基づき前記フィールド画像をドリフト補正し、重ね合わせて新たなフレーム画像を作成するデータ処理部とを有し、
前記データ処理部は、前記新たに作成されたフレーム画像のデータに基づき、前記試料に形成された観察対象のパターン寸法を算出する機能も有することを特徴とする走査電子顕微鏡。 - 請求項12記載の走査電子顕微鏡において、
前記電子が前記観察視野に照射される際、前記試料台は固定されていることを特徴とする走査電子顕微鏡。 - 請求項12または13に記載の走査電子顕微鏡において、
前記新たに作成されるフレーム画像のデータは、複数枚分積算されたものであることを特徴とする走査電子顕微鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010542821A JP5080657B2 (ja) | 2008-12-15 | 2009-11-24 | 走査電子顕微鏡 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008318305 | 2008-12-15 | ||
| JP2008318305 | 2008-12-15 | ||
| PCT/JP2009/006315 WO2010070815A1 (ja) | 2008-12-15 | 2009-11-24 | 走査電子顕微鏡 |
| JP2010542821A JP5080657B2 (ja) | 2008-12-15 | 2009-11-24 | 走査電子顕微鏡 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2010070815A1 JPWO2010070815A1 (ja) | 2012-05-24 |
| JP5080657B2 true JP5080657B2 (ja) | 2012-11-21 |
Family
ID=42268498
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010542821A Active JP5080657B2 (ja) | 2008-12-15 | 2009-11-24 | 走査電子顕微鏡 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8125518B2 (ja) |
| JP (1) | JP5080657B2 (ja) |
| WO (1) | WO2010070815A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200112638A (ko) * | 2019-03-22 | 2020-10-05 | 주식회사 히타치하이테크 | 전자빔 장치 및 화상 처리 방법 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5542478B2 (ja) * | 2010-03-02 | 2014-07-09 | 株式会社日立ハイテクノロジーズ | 荷電粒子線顕微鏡 |
| JP5468515B2 (ja) * | 2010-10-15 | 2014-04-09 | 株式会社日立ハイテクノロジーズ | 観察画像取得方法、走査型電子顕微鏡 |
| JP5389840B2 (ja) * | 2011-02-02 | 2014-01-15 | 株式会社日立ハイテクノロジーズ | パターン形状評価方法及びパターン形状評価装置 |
| JP6018789B2 (ja) * | 2012-04-26 | 2016-11-02 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| JP6130120B2 (ja) * | 2012-10-02 | 2017-05-17 | 株式会社日立ハイテクノロジーズ | 画像処理装置、画像処理方法、及びコンピュータ読取可能な記憶媒体 |
| JP5998004B2 (ja) * | 2012-10-16 | 2016-09-28 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| US9552961B2 (en) * | 2015-04-10 | 2017-01-24 | International Business Machines Corporation | Scanning transmission electron microscope having multiple beams and post-detection image correction |
| JP6673661B2 (ja) * | 2015-09-30 | 2020-03-25 | 株式会社日立ハイテクサイエンス | 画像取得方法およびイオンビーム装置 |
| JP6468160B2 (ja) * | 2015-10-16 | 2019-02-13 | 株式会社島津製作所 | 走査型荷電粒子顕微鏡 |
| DE102017212214A1 (de) | 2017-07-17 | 2019-01-17 | Carl Zeiss Microscopy Gmbh | Verfahren zum Aufzeichnen eines Bildes unter Verwendung eines Teilchenmikroskops und Teilchenmikroskop |
| JP7107653B2 (ja) * | 2017-08-31 | 2022-07-27 | 東レエンジニアリング先端半導体Miテクノロジー株式会社 | 画像生成方法 |
| JP7171010B2 (ja) * | 2018-03-07 | 2022-11-15 | 株式会社日立ハイテクサイエンス | 断面加工観察装置、断面加工観察方法及びプログラム |
| US20200311886A1 (en) * | 2019-03-28 | 2020-10-01 | Carl Zeiss Microscopy Gmbh | Method for determining an image recording aberration |
| JP7144485B2 (ja) | 2020-07-15 | 2022-09-29 | 日本電子株式会社 | 像取得方法および電子顕微鏡 |
| DE102024100606A1 (de) * | 2024-01-10 | 2025-07-10 | Carl Zeiss Microscopy Gmbh | Verfahren zum Erzeugen eines korrigierten Bildes eines Objekts, Computerprogrammprodukt sowie Teilchenstrahlgerät zur Durchführung des Verfahrens |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59224038A (ja) * | 1983-06-02 | 1984-12-15 | Shimadzu Corp | 荷電粒子線走査型分析装置 |
| JPH05290787A (ja) * | 1992-04-08 | 1993-11-05 | Jeol Ltd | 走査電子顕微鏡 |
| JP2000106121A (ja) * | 1998-07-29 | 2000-04-11 | Jeol Ltd | 電子顕微鏡あるいはその類似装置 |
| JP2000294185A (ja) * | 1999-04-05 | 2000-10-20 | Canon Inc | 分析装置および透過電子顕微鏡 |
| JP2003086126A (ja) * | 2001-09-07 | 2003-03-20 | Hitachi Ltd | 荷電粒子線顕微鏡および荷電粒子線顕微方法 |
| WO2003044821A1 (fr) * | 2001-11-21 | 2003-05-30 | Hitachi High-Technologies Corporation | Procede d'imagerie d'echantillon et systeme de faisceau de particules chargees |
| JP2006308471A (ja) * | 2005-04-28 | 2006-11-09 | Hitachi High-Technologies Corp | 画像形成方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4907287A (en) * | 1985-10-16 | 1990-03-06 | Hitachi, Ltd. | Image correction system for scanning electron microscope |
| JP2602287B2 (ja) * | 1988-07-01 | 1997-04-23 | 株式会社日立製作所 | X線マスクの欠陥検査方法及びその装置 |
| JP2833836B2 (ja) * | 1990-07-17 | 1998-12-09 | 日本電子株式会社 | 走査型電子顕微鏡のオートフォーカス方法 |
| JP3729784B2 (ja) * | 2000-02-25 | 2005-12-21 | 株式会社日立製作所 | デバイスの欠陥検査装置及び欠陥検査方法 |
| EP1455378B1 (en) | 2001-11-21 | 2013-08-14 | Hitachi High-Technologies Corporation | Sample imaging method and charged particle beam system |
-
2009
- 2009-11-24 JP JP2010542821A patent/JP5080657B2/ja active Active
- 2009-11-24 WO PCT/JP2009/006315 patent/WO2010070815A1/ja active Application Filing
- 2009-11-24 US US13/139,315 patent/US8125518B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59224038A (ja) * | 1983-06-02 | 1984-12-15 | Shimadzu Corp | 荷電粒子線走査型分析装置 |
| JPH05290787A (ja) * | 1992-04-08 | 1993-11-05 | Jeol Ltd | 走査電子顕微鏡 |
| JP2000106121A (ja) * | 1998-07-29 | 2000-04-11 | Jeol Ltd | 電子顕微鏡あるいはその類似装置 |
| JP2000294185A (ja) * | 1999-04-05 | 2000-10-20 | Canon Inc | 分析装置および透過電子顕微鏡 |
| JP2003086126A (ja) * | 2001-09-07 | 2003-03-20 | Hitachi Ltd | 荷電粒子線顕微鏡および荷電粒子線顕微方法 |
| WO2003044821A1 (fr) * | 2001-11-21 | 2003-05-30 | Hitachi High-Technologies Corporation | Procede d'imagerie d'echantillon et systeme de faisceau de particules chargees |
| JP2006308471A (ja) * | 2005-04-28 | 2006-11-09 | Hitachi High-Technologies Corp | 画像形成方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200112638A (ko) * | 2019-03-22 | 2020-10-05 | 주식회사 히타치하이테크 | 전자빔 장치 및 화상 처리 방법 |
| KR102319824B1 (ko) | 2019-03-22 | 2021-11-02 | 주식회사 히타치하이테크 | 전자빔 장치 및 화상 처리 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110249110A1 (en) | 2011-10-13 |
| US8125518B2 (en) | 2012-02-28 |
| JPWO2010070815A1 (ja) | 2012-05-24 |
| WO2010070815A1 (ja) | 2010-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5080657B2 (ja) | 走査電子顕微鏡 | |
| JP5558088B2 (ja) | 粒子光学装置の歪曲を特定するための方法 | |
| JP6668278B2 (ja) | 試料観察装置および試料観察方法 | |
| JP4512471B2 (ja) | 走査型電子顕微鏡及び半導体検査システム | |
| JP2008177064A (ja) | 走査型荷電粒子顕微鏡装置および走査型荷電粒子顕微鏡装置で取得した画像の処理方法 | |
| US20210296089A1 (en) | Method of recording an image using a particle microscope | |
| JP2006093251A (ja) | 寸法計測方法及びその装置 | |
| TWI415161B (zh) | 帶電粒子束成像系統與於連續移動平台上陣列掃描一試片以進行該試片帶電粒子束成像的方法 | |
| US8559697B2 (en) | Mask inspection apparatus and image generation method | |
| JP2020113769A (ja) | 画像推定方法およびシステム | |
| JP6130120B2 (ja) | 画像処理装置、画像処理方法、及びコンピュータ読取可能な記憶媒体 | |
| JP5192791B2 (ja) | パターン寸法計測方法及び走査電子顕微鏡 | |
| KR20160067750A (ko) | 하전 입자 빔 장치 및 화상 취득 방법 | |
| TWI742524B (zh) | 電子束裝置及圖像處理方法 | |
| JP2012142299A (ja) | 走査型荷電粒子顕微鏡装置および走査型荷電粒子顕微鏡装置で取得した画像の処理方法 | |
| JP2015232958A (ja) | 荷電粒子線装置、三次元画像の再構成画像処理システム、方法 | |
| JP7042361B2 (ja) | 撮像装置 | |
| JP7576592B2 (ja) | 荷電粒子線装置および画像取得方法 | |
| JP6528035B2 (ja) | 電子顕微鏡 | |
| JP5892424B2 (ja) | 画像取得方法、画像取得装置及び走査型顕微鏡 | |
| JP7144485B2 (ja) | 像取得方法および電子顕微鏡 | |
| JP2016106268A (ja) | 画像取得方法、画像取得装置及び走査型顕微鏡 | |
| JP2006073286A (ja) | パターン検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120807 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120830 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150907 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5080657 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |