JP5014051B2 - 血管超音波画像測定方法 - Google Patents
血管超音波画像測定方法 Download PDFInfo
- Publication number
- JP5014051B2 JP5014051B2 JP2007263805A JP2007263805A JP5014051B2 JP 5014051 B2 JP5014051 B2 JP 5014051B2 JP 2007263805 A JP2007263805 A JP 2007263805A JP 2007263805 A JP2007263805 A JP 2007263805A JP 5014051 B2 JP5014051 B2 JP 5014051B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- short
- blood vessel
- ultrasonic
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4887—Locating particular structures in or on the body
- A61B5/489—Blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/683—Means for maintaining contact with the body
- A61B5/6835—Supports or holders, e.g., articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0891—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4209—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames
- A61B8/4218—Details of probe positioning or probe attachment to the patient by using holders, e.g. positioning frames characterised by articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4272—Details of probe positioning or probe attachment to the patient involving the acoustic interface between the transducer and the tissue
- A61B8/4281—Details of probe positioning or probe attachment to the patient involving the acoustic interface between the transducer and the tissue characterised by sound-transmitting media or devices for coupling the transducer to the tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
- A61B8/4494—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer characterised by the arrangement of the transducer elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/464—Displaying means of special interest involving a plurality of displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8934—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration
- G01S15/8936—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a dynamic transducer configuration using transducers mounted for mechanical movement in three dimensions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/5206—Two-dimensional coordinated display of distance and direction; B-scan display
- G01S7/52065—Compound scan display, e.g. panoramic imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
- G01S15/8925—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array the array being a two-dimensional transducer configuration, i.e. matrix or orthogonal linear arrays
Description
18:皮膚
20:血管
24、102、112:超音波プローブ
26:多軸駆動装置(位置決め装置)
27:探触面(一平面)
30:モニタ画面表示装置(画像表示装置)
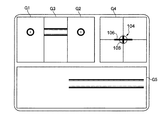
104:記号
a1〜an:超音波振動子(超音波発振子)
A:第1短軸用超音波アレイ探触子
B:第2短軸用超音波アレイ探触子
C:長軸用超音波アレイ探触子
G1:第1短軸画像表示領域
G2:第2短軸画像表示領域
G3:長軸画像表示領域
G4:位置決め状態表示領域
G5:長軸合体画像表示領域
S2〜S15:X軸まわり位置決め工程
S2〜S12、S16〜S19:X軸方向位置決め工程
S2〜S12、S16、S20〜S23:Z軸まわり位置決め工程
S25:血管径算出工程、血管膜厚算出工程
Claims (11)
- 複数個の超音波発振子がX軸方向に平行な方向に沿って直線的に配列された互いに平行な一対の第1短軸用超音波アレイ探触子および第2短軸用超音波アレイ探触子と、前記一対の第1短軸用超音波アレイ探触子および/または第2短軸用超音波アレイ探触子に隣接して前記X軸方向と直交するY軸方向に複数個の超音波発振子が直線的に配列された長軸用超音波アレイ探触子とを一平面に備えた超音波プローブと、
前記X軸まわりに回転させ、該X軸方向に移動させ、前記第1短軸用超音波アレイ探触子の長手方向の中央部を通り前記第1短軸用超音波アレイ探触子の長手方向と前記長軸用超音波アレイ探触子の長手方向との交点を通り前記X軸方向およびY軸方向に直交し且つ前記一平面に垂直なZ軸まわりに回転させることが可能な位置決め装置と、
前記第1短軸用超音波アレイ探触子による超音波画像を表示する第1短軸画像表示領域と、前記第2短軸用超音波アレイ探触子による超音波画像を表示する第2短軸画像表示領域と、前記長軸用超音波アレイ探触子による超音波画像を表示する長軸画像表示領域とを有する画像表示装置と
を、用いて前記超音波プローブを生体の皮膚に接触させることにより該生体の皮膚下の血管の超音波画像を測定するための血管超音波画像測定方法であって、
前記第1短軸用超音波アレイ探触子から前記血管の中心までの距離と前記第2短軸用超音波アレイ探触子から前記血管の中心までの距離とが等しくなるように、前記位置決め装置に前記超音波プローブを前記X軸まわりに位置決めさせるX軸まわり位置決め工程と、
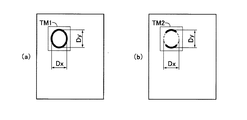
前記第1短軸画像表示領域の幅方向中央部に前記血管の短軸画像を位置させるように、前記位置決め装置に前記超音波プローブを前記X軸方向に平行移動させるX軸方向位置決め工程と、
前記第2短軸画像表示領域の幅方向中央部に前記血管の短軸画像を位置させるように、前記位置決め装置に前記超音波プローブを前記Z軸まわりに回転させるZ軸まわり位置決め工程と、
前記長軸用超音波アレイ探触子により得られた長軸画像信号に基づいて前記血管の内腔径、内膜厚、および/または内中膜壁厚を算出する算出工程とを、含み、
前記X軸まわり位置決め工程、前記X軸方向位置決め工程、あるいは前記Z軸まわり位置決め工程において、前記血管の短軸画像を認識するためにパターン認識が実行される
ことを特徴とする血管超音波画像測定方法。 - 前記X軸は前記皮膚下を通る軸であり、
前記X軸まわり位置決め工程は、前記超音波プローブを該X軸まわりに位置決めさせるものである請求項1の血管超音波画像測定方法。 - 前記画像表示装置は、前記第1短軸画像表示領域および/または第2短軸画像表示領域に隣接して、前記長軸用超音波アレイ探触子による超音波画像を表示する長軸画像表示領域を備え、該第1短軸画像表示領域、第2短軸画像表示領域、および長軸画像表示領域は、前記皮膚からの深さ寸法を示す共通の縦軸を備えたものである請求項1または2の血管超音波画像測定方法。
- 前記長軸用超音波アレイ探触子により検出された前記血管の長軸画像信号に基づいて該血管の内腔径を算出する血管径算出工程を含むことを特徴とする請求項1乃至3のいずれか1の血管超音波画像測定方法。
- 前記長軸用超音波アレイ探触子により検出された前記血管の長軸画像信号に基づいて該血管の内膜厚および/または内中膜壁厚を算出する血管膜厚算出工程を含むことを特徴とする請求項1乃至4のいずれか1の血管超音波画像測定方法。
- 前記一対の第1短軸用超音波アレイ探触子および第2短軸用超音波アレイ探触子は、前記血管に対して該血管の上流側または下流側へ所定角度斜めに向かう方向に超音波を放射するものである請求項1乃至5のいずれか1の血管超音波画像測定方法。
- 前記第1短軸用超音波アレイ探触子および第2短軸用超音波アレイ探触子によりそれぞれ検出された前記血管の短軸超音波画像を前記第1短軸画像表示領域および第2短軸画像表示領域にそれぞれ表示させるに際して、前記所定角度に基づいて、該第1短軸画像表示領域および第2短軸画像表示領域にそれぞれ表示させる短軸超音波画像を、該第1短軸用超音波アレイ探触子および第2短軸用超音波アレイ探触子の超音波放射方向が前記血管に対して直角である状態の画像に補正する画像補正工程を、含むことを特徴とする請求項6の血管超音波画像測定方法。
- 前記パターン認識は、前記第1短軸用超音波アレイ探触子および前記第2短軸用超音波アレイ探触子による前記第1短軸画像表示領域及び第2短軸画像表示領域内の超音波画像において前記血管の短軸画像がドプラ信号を含む状態で実行されることを特徴とする請求項1の血管超音波画像測定方法。
- 前記第1短軸用超音波アレイ探触子あるいは前記第2短軸用超音波アレイ探触子により検出された前記血管の短軸画像信号に基づいて該血管の内腔径および/または内中膜壁厚を算出する血管パラメータ算出工程を含むことを特徴とする請求項1乃至8のいずれか1の血管超音波画像測定方法。
- 位置決め状態表示領域内において、前記第1短軸画像表示領域内に表示された前記血管の短軸画像の該第1短軸画像表示領域の両側縁までの距離を表すために互いに直交する第1方向および第2方向のうちの一方に沿って移動し、前記第2短軸画像表示領域内に表示された前記血管の短軸画像の該第2短軸画像表示領域の両側縁までの距離を表すために互いに直交する第1方向および第2方向のうちの他方に沿って移動し、前記第1短軸画像表示領域内に表示された前記血管の短軸画像の該第1短軸画像表示領域の上縁または下縁までの距離と前記第2短軸画像表示領域内に表示された前記血管の短軸画像の該第2短軸画像表示領域の上縁または下縁までの距離との差を表すために傾斜する記号を、該位置決め状態表示領域内に表示させる工程
を、含むことを特徴とする請求項1乃至9のいずれか1の血管超音波画像測定方法。 - 前記長軸画像表示領域に表示された前記血管の長軸画像を第1画像として記憶するとともに、該血管の長軸画像の長手方向の一部を第1テンプレートとして予め登録する工程と、
前記超音波プローブが前記血管に沿って移動させられる過程で、前記第1テンプレートと一致する前記血管の長軸画像の長手方向の一部が前記長軸画像表示領域の予め設定された端部に到達すると、該長軸画像表示領域に表示された前記血管の長軸画像を第2画像として記憶するとともに、該血管の長軸画像の長手方向の一部を第2テンプレートとして登録する工程と、
さらに前記超音波プローブが前記血管に沿って移動させられる過程で、前記第2テンプレートと一致する前記血管の長軸画像の長手方向の一部が前記長軸画像表示領域の予め設定された端部に到達すると、該長軸画像表示領域に表示された前記血管の長軸画像を第3画像として記憶する工程と、
前記第1画像、第2画像、及び第3画像から前記血管の長軸画像の長手方向寸法よりも長い一本の長軸画像を合成して合成長軸画像表示領域に表示させる工程と
を、含むことを特徴とする請求項1乃至9のいずれか1の血管超音波画像測定方法。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007263805A JP5014051B2 (ja) | 2007-10-09 | 2007-10-09 | 血管超音波画像測定方法 |
| US12/734,045 US9089306B2 (en) | 2007-10-09 | 2008-09-16 | Blood vessel ultrasonic image measuring method |
| KR1020107007968A KR101553958B1 (ko) | 2007-10-09 | 2008-09-16 | 혈관 초음파 화상 측정방법 |
| PCT/JP2008/066682 WO2009047966A1 (ja) | 2007-10-09 | 2008-09-16 | 血管超音波画像測定方法 |
| CN200880111011.XA CN101820820B (zh) | 2007-10-09 | 2008-09-16 | 血管超声波图像测定方法 |
| EP08837581.1A EP2198784B1 (en) | 2007-10-09 | 2008-09-16 | Blood-vessel ultrasonographing method |
| HK11101976.3A HK1147925A1 (en) | 2007-10-09 | 2011-02-28 | Blood-vessel ultrasonographing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007263805A JP5014051B2 (ja) | 2007-10-09 | 2007-10-09 | 血管超音波画像測定方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009089911A JP2009089911A (ja) | 2009-04-30 |
| JP2009089911A5 JP2009089911A5 (ja) | 2011-10-20 |
| JP5014051B2 true JP5014051B2 (ja) | 2012-08-29 |
Family
ID=40549111
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007263805A Active JP5014051B2 (ja) | 2007-10-09 | 2007-10-09 | 血管超音波画像測定方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9089306B2 (ja) |
| EP (1) | EP2198784B1 (ja) |
| JP (1) | JP5014051B2 (ja) |
| KR (1) | KR101553958B1 (ja) |
| CN (1) | CN101820820B (ja) |
| HK (1) | HK1147925A1 (ja) |
| WO (1) | WO2009047966A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11911134B2 (en) | 2020-07-23 | 2024-02-27 | Samsung Electronics Co., Ltd. | Apparatus and method for estimating bio-information |
Families Citing this family (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2419022B1 (en) * | 2009-04-14 | 2019-11-06 | Maui Imaging, Inc. | Multiple aperture ultrasound array alignment fixture |
| JP5219228B2 (ja) * | 2009-06-09 | 2013-06-26 | 独立行政法人産業技術総合研究所 | 血管機能検査装置 |
| EP2454995B1 (en) * | 2009-07-16 | 2019-01-23 | Unex Corporation | Ultrasonic blood vessel examination apparatus |
| KR101175402B1 (ko) * | 2009-08-31 | 2012-08-20 | 삼성메디슨 주식회사 | 가상의 변환소자에 기초하여 스캔라인의 스티어링을 설정하는 초음파 시스템 및 방법 |
| WO2011030415A1 (ja) | 2009-09-09 | 2011-03-17 | 株式会社ユネクス | 血管機能検査装置 |
| CN102573646A (zh) * | 2009-09-18 | 2012-07-11 | 松下电器产业株式会社 | 超声波诊断装置和使用超声波诊断装置的诊断方法 |
| JP5428795B2 (ja) * | 2009-11-19 | 2014-02-26 | 学校法人早稲田大学 | 超音波診断システム、超音波診断装置用ロボット、及びプログラム |
| JP5672241B2 (ja) * | 2009-12-18 | 2015-02-18 | コニカミノルタ株式会社 | 超音波診断装置およびその制御方法 |
| CN102469987B (zh) * | 2010-02-10 | 2015-11-25 | 柯尼卡美能达株式会社 | 超声波诊断装置以及内中膜复合体厚度的测定方法 |
| US9028417B2 (en) | 2010-10-18 | 2015-05-12 | CardioSonic Ltd. | Ultrasound emission element |
| US9566456B2 (en) | 2010-10-18 | 2017-02-14 | CardioSonic Ltd. | Ultrasound transceiver and cooling thereof |
| US20120095371A1 (en) | 2010-10-18 | 2012-04-19 | CardioSonic Ltd. | Ultrasound transducer and cooling thereof |
| US20130204242A1 (en) * | 2010-10-18 | 2013-08-08 | CardioSonic Ltd. | Ultrasound transceiver and control of a thermal damage process |
| KR101761314B1 (ko) * | 2010-12-03 | 2017-07-26 | 삼성전자주식회사 | 생체 신호 측정 로봇 및 그 제어방법 |
| WO2012105162A1 (ja) * | 2011-01-31 | 2012-08-09 | パナソニック株式会社 | 超音波診断装置 |
| JP5972569B2 (ja) * | 2011-12-26 | 2016-08-17 | 東芝メディカルシステムズ株式会社 | 超音波診断装置、超音波画像処置装置、医用画像診断装置及び超音波画像処理プログラム |
| TWI482613B (zh) | 2011-12-27 | 2015-05-01 | Ind Tech Res Inst | 訊號分析方法、超音波影像分析方法以及超音波成像系統 |
| US10357304B2 (en) | 2012-04-18 | 2019-07-23 | CardioSonic Ltd. | Tissue treatment |
| US11357447B2 (en) | 2012-05-31 | 2022-06-14 | Sonivie Ltd. | Method and/or apparatus for measuring renal denervation effectiveness |
| WO2014188430A2 (en) | 2013-05-23 | 2014-11-27 | CardioSonic Ltd. | Devices and methods for renal denervation and assessment thereof |
| KR20150069830A (ko) * | 2013-12-16 | 2015-06-24 | 삼성전자주식회사 | 의료 영상을 이용한 혈관 분석 정보 제공 방법 및 장치 |
| CN104605889A (zh) * | 2014-09-16 | 2015-05-13 | 北京迈纳士手术机器人技术股份有限公司 | 一种人体或者动物血管的数字化识别定位方法 |
| WO2016134330A1 (en) | 2015-02-19 | 2016-08-25 | Briteseed Llc | System and method for determining vessel size and/or edge |
| KR101648425B1 (ko) * | 2015-03-30 | 2016-08-16 | 한국항공우주산업 주식회사 | 항공기구조물의 복합소재 초음파검사 구동장치 |
| JP6544092B2 (ja) * | 2015-07-08 | 2019-07-17 | 国立大学法人東京農工大学 | 血管径測定装置 |
| CN106308848B (zh) * | 2015-07-10 | 2024-01-23 | 通用电气公司 | 一种用于测量超声影像的方法及装置 |
| JP6960922B2 (ja) * | 2015-12-21 | 2021-11-05 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 被験者のボリュームを検査する超音波撮像装置及び超音波撮像方法 |
| CN105380682B (zh) * | 2015-12-24 | 2018-06-08 | 飞依诺科技(苏州)有限公司 | 基于超声图像的双边内中膜的测量方法及系统 |
| US11020058B2 (en) | 2016-02-12 | 2021-06-01 | Qualcomm Incorporated | Methods and devices for calculating blood pressure based on measurements of arterial blood flow and arterial lumen |
| JP6675599B2 (ja) * | 2016-02-24 | 2020-04-01 | 国立大学法人 名古屋工業大学 | 生体内超音波三次元画像生成装置およびそれを用いた生体動脈血管形状検出装置 |
| EP3562404A4 (en) * | 2016-12-27 | 2020-09-09 | Hemonitor Medical Ltd. | HANDS-FREE CONTINUOUS ULTRASOUND MONITORING SYSTEMS AND METHODS |
| EP3600434A4 (en) | 2017-03-20 | 2021-01-06 | Sonievie Ltd. | TREATMENT OF PULMONARY HYPERTENSION |
| US10928494B1 (en) * | 2017-07-10 | 2021-02-23 | Interson Corporation | Ultrasound plural display apparatus with light indicator for positional access |
| KR101976394B1 (ko) * | 2017-07-19 | 2019-05-10 | 고려대학교산학협력단 | 초음파 소식자 장치 |
| US11759168B2 (en) * | 2017-11-14 | 2023-09-19 | Koninklijke Philips N.V. | Ultrasound vascular navigation devices and methods |
| WO2019156975A1 (en) * | 2018-02-07 | 2019-08-15 | Atherosys, Inc. | Apparatus and method to guide ultrasound acquisition of the peripheral arteries in the transverse plane |
| US11278259B2 (en) | 2018-02-23 | 2022-03-22 | Verathon Inc. | Thrombus detection during scanning |
| EP4033984A4 (en) * | 2019-09-27 | 2023-10-18 | BFLY Operations, Inc. | METHOD AND APPARATUS FOR PROVIDING FEEDBACK FOR POSITIONING AN ULTRASONIC DEVICE |
| EP4104768A4 (en) * | 2020-02-14 | 2023-11-08 | Asahi Intecc Co., Ltd. | ULTRASONIC PROBE OPERATING SYSTEM AND METHOD |
| US20220087643A1 (en) * | 2020-09-23 | 2022-03-24 | 3Dintegrated Aps | Patient bearing system, a robotic system |
| CN114431892B (zh) * | 2020-10-30 | 2024-04-16 | 通用电气精准医疗有限责任公司 | 一种超声成像系统及超声成像方法 |
| JP2022074392A (ja) * | 2020-11-04 | 2022-05-18 | コニカミノルタ株式会社 | 超音波診断装置、超音波診断装置の制御方法、及び、超音波診断装置の制御プログラム |
| CN112747688A (zh) * | 2020-12-24 | 2021-05-04 | 山东大学 | 一种基于超声检测定位的离散制造业外观质量信息收集装置及其应用 |
| JPWO2022153727A1 (ja) * | 2021-01-18 | 2022-07-21 | ||
| KR102435554B1 (ko) * | 2022-04-28 | 2022-08-23 | 주식회사 엣지케어 | 혈류 측정 시스템 |
| KR102447518B1 (ko) * | 2022-07-01 | 2022-09-26 | 주식회사 엣지케어 | 혈류 측정 시스템 |
| KR102470768B1 (ko) * | 2022-08-03 | 2022-11-25 | 주식회사 엣지케어 | 혈류 측정 시스템 |
| CN116616820B (zh) * | 2023-05-31 | 2024-04-12 | 武汉库柏特科技有限公司 | 血管的机器人超声扫描方法、装置、设备及介质 |
| KR102631141B1 (ko) * | 2023-07-11 | 2024-01-30 | 주식회사 엣지케어 | 듀얼 모드 프로브를 포함하는 초음파 영상장치 |
| KR102636497B1 (ko) * | 2023-09-19 | 2024-02-14 | 주식회사 엣지케어 | 혈류 측정장치 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3187148B2 (ja) * | 1991-08-26 | 2001-07-11 | 株式会社東芝 | 超音波診断装置 |
| JPH0589244A (ja) * | 1991-09-27 | 1993-04-09 | Hitachi Ltd | パターンマツチング方法及び装置 |
| FR2759892A1 (fr) * | 1996-12-31 | 1998-08-28 | Philips Electronics Nv | Systeme d'echographie ultrasonore pour l'examen des arteres |
| JP3645727B2 (ja) * | 1999-01-28 | 2005-05-11 | 株式会社日立製作所 | 超音波診断装置およびパノラマ画像を合成するプログラムおよびその記録媒体 |
| JP3752921B2 (ja) * | 1999-10-08 | 2006-03-08 | 株式会社日立製作所 | 超音波像の立体パノラマ画像合成装置 |
| JP2001157677A (ja) * | 1999-12-01 | 2001-06-12 | Hitachi Medical Corp | 超音波診断装置 |
| US6503201B1 (en) * | 2001-10-03 | 2003-01-07 | Koninklijke Philips Electronics N.V. | Correction of extended field of view images for distortion due to scanhead motion |
| JP4217023B2 (ja) | 2002-02-25 | 2009-01-28 | 一郎 佐久間 | 血管内皮計測装置 |
| US20060042389A1 (en) | 2002-10-09 | 2006-03-02 | Matsushita Electric Industrial Co., Ltd. | Ultrasonic diagnosing device |
| JP4649445B2 (ja) * | 2003-06-19 | 2011-03-09 | サラヤ株式会社 | エコーを用いた血管径測定方法およびその装置 |
| JP4536419B2 (ja) * | 2004-05-19 | 2010-09-01 | 株式会社日立メディコ | 超音波診断装置 |
| JP4555619B2 (ja) * | 2004-06-28 | 2010-10-06 | アロカ株式会社 | 超音波診断装置 |
| US7862512B2 (en) * | 2005-08-29 | 2011-01-04 | Unex Corporation | Blood vessel endothelium function evaluating apparatus provided with an electronic control device |
| JP4855182B2 (ja) * | 2005-08-29 | 2012-01-18 | 株式会社ユネクス | 血管画像測定装置 |
-
2007
- 2007-10-09 JP JP2007263805A patent/JP5014051B2/ja active Active
-
2008
- 2008-09-16 KR KR1020107007968A patent/KR101553958B1/ko active IP Right Grant
- 2008-09-16 US US12/734,045 patent/US9089306B2/en active Active
- 2008-09-16 WO PCT/JP2008/066682 patent/WO2009047966A1/ja active Application Filing
- 2008-09-16 EP EP08837581.1A patent/EP2198784B1/en active Active
- 2008-09-16 CN CN200880111011.XA patent/CN101820820B/zh active Active
-
2011
- 2011-02-28 HK HK11101976.3A patent/HK1147925A1/xx not_active IP Right Cessation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11911134B2 (en) | 2020-07-23 | 2024-02-27 | Samsung Electronics Co., Ltd. | Apparatus and method for estimating bio-information |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2198784A4 (en) | 2013-12-25 |
| EP2198784B1 (en) | 2016-11-09 |
| CN101820820B (zh) | 2012-07-25 |
| KR101553958B1 (ko) | 2015-09-17 |
| EP2198784A1 (en) | 2010-06-23 |
| US9089306B2 (en) | 2015-07-28 |
| WO2009047966A1 (ja) | 2009-04-16 |
| HK1147925A1 (en) | 2011-08-26 |
| JP2009089911A (ja) | 2009-04-30 |
| CN101820820A (zh) | 2010-09-01 |
| US20100210946A1 (en) | 2010-08-19 |
| KR20100080533A (ko) | 2010-07-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5014051B2 (ja) | 血管超音波画像測定方法 | |
| US7862512B2 (en) | Blood vessel endothelium function evaluating apparatus provided with an electronic control device | |
| US8939908B2 (en) | Ultrasonic blood vessel inspecting apparatus | |
| JP4855182B2 (ja) | 血管画像測定装置 | |
| JP5672241B2 (ja) | 超音波診断装置およびその制御方法 | |
| JP5155693B2 (ja) | 超音波検査装置 | |
| WO2009107745A1 (ja) | 超音波検査装置 | |
| JP5998197B2 (ja) | 生体の血管径連続測定装置 | |
| JP5527953B2 (ja) | 血管拡張反応画像表示装置 | |
| JP2005074146A (ja) | 超音波測定方法、超音波発生機構 | |
| JP3596344B2 (ja) | 超音波トランスデューサの特性試験装置 | |
| JP2009136416A (ja) | 超音波送受波装置 | |
| JP6243719B2 (ja) | 生体血管状態測定装置 | |
| JP5108432B2 (ja) | 生体血管パラメータ測定用上肢保持装置 | |
| JP5276465B2 (ja) | 超音波診断装置及び医療システム | |
| WO2020158301A1 (ja) | 超音波撮像装置、治療支援システム、及び、画像処理方法 | |
| JP2023107256A (ja) | 穿刺針位置表示装置 | |
| JPH02124148A (ja) | 超音波診断装置 | |
| JP6013377B2 (ja) | 生体血管パラメータ測定装置 | |
| JPH07155316A (ja) | 管腔内診断システム | |
| JP2012125284A (ja) | 超音波診断装置 | |
| JP2017148244A (ja) | 生体内超音波三次元画像生成装置およびそれを用いた生体動脈血管形状検出装置 | |
| JP2010094273A (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100906 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100906 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110902 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120409 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120529 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120605 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150615 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5014051 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |