JP4960929B2 - 自動二輪車のブレーキ制御装置及び挙動解析装置 - Google Patents
自動二輪車のブレーキ制御装置及び挙動解析装置 Download PDFInfo
- Publication number
- JP4960929B2 JP4960929B2 JP2008173908A JP2008173908A JP4960929B2 JP 4960929 B2 JP4960929 B2 JP 4960929B2 JP 2008173908 A JP2008173908 A JP 2008173908A JP 2008173908 A JP2008173908 A JP 2008173908A JP 4960929 B2 JP4960929 B2 JP 4960929B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- lateral
- angle
- inclination
- tilt
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Landscapes
- Regulating Braking Force (AREA)
- Hydraulic Control Valves For Brake Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
しかしながら、ライダーへの警報だけでは、転倒防止の安全策として不十分なのは明らかである。 また、既存のABS装置に対し センサーを付加し傾斜角度の算出を行い 車両の走行速度から ブレーキ油圧のコントロール上限値を単に変更する方法 及び 車輪のスリップ率の算出を行い傾斜状態あわせ目標スリップ率を可変する方法では、 加減速に伴う荷重配分の変動、ライダー体重の変化による車両荷重の変化、傾斜走行状態における車両挙動が安定なのか不安定なのかを判断できる客観的基準が無いために、ライダーの意思を尊重することができないばかりか、ライダーによるブレーキの操作がないと機能しないため走行中に起きた車両挙動変化に応じて 自動的に車両を安定状態へ遷移することができなかった。
4輪車に比べ大きな荷重変化を伴う二輪車は 目まぐるしく変化する車両走行状態に対し 傾斜角度だけで追従する事は困難である。
また、日本は高齢化社会の傾向であると云われており 高齢化に伴い環境への反応が悪くなっていき、適切な操作能力が低下していくことが知られている。 それは 運転経験の少ないライダー同様に遅い反応・荒い操作 が車両を不安定にする場合も少なくない。
一方、いくら運転経験を増しても傾斜限界は分り難く、傾斜限界付近を認識する為に傾斜角度をカーブ途中でさぐる様な傾斜操作を行うものであり、路面μが高い状態であれば 車体の一部(ステップにある金属製のバンクセンサー等)を路面に接地させることで車両の傾斜限界を認識したりする。
二輪車は車両構造上、倒れるという特徴を持っている。 一般的には、高速になるに従い安定し、低速になるに従い不安定となり、足を着かなければ通常倒立して停止することができない。 しかしながら、安定と言われる中高速走行時でさえも無理な操作・路面の急激な変化による車両挙動の変化に対して、二輪車は不安定となり最悪の場合転倒に至る可能性が存在している。
このような乗り物に対し、走行時の車両の挙動に対して 不安を少しでも低減することが出来るならばライダーは、安全に運転技量を身につけることができると同時に 操作に対して過度に慎重になることが不要になるため 過度な緊張から開放され周囲の状況にも配慮ができる余裕が生まれるため 安全に対する意識マージンが大幅に向上し 疲労も低減できる筈である。
二輪車は、その特徴である傾斜をコントロールして その先のカーブに合わせ車体を左右にロール(傾斜)させ 行きたい方向に曲がっていく。 時には、速度がカーブに対して過剰であったと感じられれば ブレーキによる制動などを加え スピード抑制しカーブを通過する。
よって、高齢化社会を迎える背景にある日本では 機能低下を補う安全装置の必然性が潜在的に存在することが見てとれる。
今日では、ABSと呼ばれるシステムや コンバインドブレーキと呼ばれる前後連動ブレーキシステム が合体されたブレーキ装置 の登場により、直進走行時のブレーキによる車輪のロックを防ぐ制御システムにより直進のブレーキ安定性はかなり向上してきた。
しかしながら、走行中の傾斜角変化に応じてブレーキ油圧を加圧減圧し制御による自動減速を行いながら 車両挙動を安定化に導くための装置は存在していなかった。
また、今後時代の変化に伴って 現在は油圧によるブレーキ制動が大半であるが 今後環境への配慮など さまざまな条件により 油圧から電機モーターによるブレーキ制御が主流をしめる可能性もあり、その対応を明記しておく。
また、同様に車両挙動検出において、角速度センサーのみにより 横方向の傾斜角が算出される積分方法では、倒立を示す絶対角度の情報(積分の初期値)がないため システムの電源が投入された状態が倒立状態として 誤認識をしてしまう可能性が対応できなかった。 (特開2004−155412 問題点)
本考案は、これまで関連づけされてこなかった 走行時の横Gセンサーと角速度センサーを関連づけし これまで正確な傾斜角の検出ができなかった諸問題を解決し 車両の走行状態での正確な横Gを検出することを可能するものである。
同時に、横Gセンサーと角速度センサーの明確な関連により 車両の挙動を把握することが可能になったことで これまで実現困難であった車両を安定化に導く自動ブレーキシステムの提案により 転倒抑制を行うことを可能とした車両挙動安定化の為の自動ブレーキ装置の実現を課題とする。
ライダーのスキルによって 走り方の限界は変化する。 傾斜角がその一つであり、現状では傾斜角が限界に近づいても車体の一部が接しなければライダーは分る術が存在していない。
天候や気温もその要因であり、雨で路面が濡れている状況下で 晴天のような勢いでコーナーを傾斜させていくと傾斜限界角度になるずっと前の傾斜の浅い状態からタイヤが滑り出し 転倒にいたる可能性も危惧される。
よって、ライダーのスキルに対応したシステムが要望される。
べる)を導く理論式を明確化し 車両挙動の判断するための基準を提供する。
及び 二輪車の挙動検出の為に 少なくとも傾斜加速度センサーと傾斜から生じる横方向
加速度を検出するための加速度センサーを搭載し、そのセンサーから検出される信号に基
づき 走行中に発生する傾斜角度・傾斜角速度・傾斜角加速度の各値が 予め設定される
閾値以下になるように ライダーの操作によらず前後輪のブレーキ圧力を 加圧減圧の全
てをコントロールするための手段を提供する。
具体的には、新請求項1として記載の
あ) ECUからの制動指令により車両を減速させるためには、車輪への制動をエンジンブレーキ力やブレーキディスクへのブレーキ力の調整を行うことで実施される。
自動車では各輪へのブレーキ制御として、4輪ESC(横滑り防止装置)と呼ばれる装置でも油圧ブレーキ制御と併用し、エンジン制御がおこなわれており、多く先願が示す様に技術としては公知である。
い) しかしながら、本出願に示される様にブレーキ力が車体を倒立側にしたり傾斜側にしたりする関係を明記し、傾斜の制御に言及するものは存在しなかった。
エンジンブレーキもブレーキ手段の一つであり、ほとんどのライダーはカーブ直前の傾斜時にアクセルを戻す操作をし、エンジンブレーキを効果的に用いてスムーズな重心移動と車体挙動をつくりだしカーブを通過していくことが「0112」に記述される。
う) 本出願も燃料制限を効果的に加えることで、アクセルを戻す操作と同様の効果を意図的に得られ、マイルドな車体の傾斜変化を実現していくことが「0113」にも記述される。
新請求項2に記載の内容は、
え) 角速度だけでも制御可能であるが、よりスムーズでマイルドな車体の傾斜変化を実現するためには、傾斜の角速度以外にも運動エネルギー算出をするために角加速度が必要であり、更に、傾斜角に応じた挙動のセッティングができるように傾斜角度も必要になることが図17に記述される。
新請求項3に記載の内容は、
お) 加速度センサーを車両に付加しただけでは「0003」記述の問題は解決できない。角速度補正することで、傾斜角度が変化しても姿勢の判断が可能となる。 また、傾斜角に応じた理論検出横Gの実車合わせ込み手法が記述されている。
新請求項4に記載の内容は、
か) 傾斜時の路面接地点の変化が分れば、理論的に加速度センサーで検出される理論検出横Gを算出することが可能であることが、記述されている。
横Gの発生メカニズムの根幹を示したものであり、ライダーが実際に傾斜コントロールをする上で基準が存在することが判明したため、理論検出横Gを規範横Gと称して説明している。
新請求項5に記載の内容は、
き) 車両の挙動解析が可能となり、挙動抑制のためのブレーキ装置が可能となる。挙動解析により、今までのシミュレーション解析をより向上させることが可能となる。偏差横Gは、走行時の安定度を示す。
周辺技術情報としては、
く) 四輪車は、‘78年ABS装着車‘95年ESP(横滑り防止装置)装着車が量産車として上市される。 ガソリンとMOTORの両駆動源を持つハイブリッドカーについては、‘97年10月量産車初上市。‘07年電気自動車が、東京MOTORショーで発表、‘09年初登録される。
け) 一方、二輪車は、‘88年ABSの上市、‘96年前後輪連動ABSブレーキの上市。電動バイクについては、‘02年11月より地域限定ながら発売されている。 自転車とエンジンのハイブリッドが、‘66年には存在していた。
その結果、これまで不可能であった経験豊かなライダーの乗り方をデータとして共通解析できると供に、制御ユニットへ運転ノウハウを落とし込めることが可能であり、車両傾斜時のブレーキアシストによる車両の安定制御が可能となり ライダーの転倒抑制を行うことができる様になった。
強いては、ライダーの操作遅れによる過度な粗い操作と不安定な挙動 及び傾斜中の難しいブレーキ操作 から精神的負担が減り、次の操作へ精神的な余裕や 操作マージンが生まれるため 周囲への交通事情に配慮が可能なため 安全度が増すことを可能とした。
図1の説明に入る。 二輪車の車体10 には、車両の挙動を検出するハイブリッドセンサー20 が搭載される。 ハイブリッドセンサー20 には、車両進行方向の加速度が測定できる加速度センサー21、進行方向の左右傾斜角速度(ロール方向の傾斜速度)を測定できる角速度センサー22(ヨーレートセンサー又はジャイロセンサーと呼ばれることがある)、及び進行方向に90度向きの異なる左右の横加速度を測定できる加速度センサー23 が内蔵される。
2つの車輪には、ホイールの回転速度を検出する前輪車輪速センサー24 及び後輪車輪側センサー25、 前輪のダンパーの距離を測定するストロークセンサー26、 後輪のダンパー距離を測定するストロークセンサー27 及び 前輪後輪へのブレーキ油圧を独立して加圧減圧できるブレーキ油圧コントロールユニット30 から構成される。
ここで使用されるハイブリッドセンサー20 は、二方向の加速度を検出する加速度センサーと角速度センサーが一体化したものであり、多くの4輪車において普及を見せてきている横滑り防止装置(ESCと呼ばれるが、自動車会社によりシステム名称が異なっている)と呼ばれるシステムに使用される 半導体センサー技術を用いている。 ひとつの小型パッケージで、それら全てのセンサーが内蔵されているため、二輪車への搭載を可能にしている。 本ハイブリッドセンサー20 は、車体の重心位置近くにレイアウトさることにより 検出精度とコントロール精度を高く維持することができる。
図2は、車両安定化ブレーキ制御装置の油圧構成であり、ECUと呼ばれるコンピューターを搭載したコントロールユニットにより 油圧コントロールがされる。
通常、制動のための油圧コントロールはライダーにより前輪はレバー入力 後輪はぺダル入力によりブレーキ力が加えられる。
前輪であれば、マスターシリンダー(MC−F)により油圧に変換され、発生した油圧は SV1(ソレノイドバルブ1)を通過し SV2を通過して BC1・BC2のブレーキシリンダーへ圧力が加えられ、ブレーキがかかる。 ブレーキが放されれば、BC1・BC2にくわえられた圧力は 圧力が加えられた順路をさかのぼり 経路たどってMC−Fを押し戻す。 ECUによるコントロールのないコンベンショナルな動きとしては、SV1・SV2の電磁ソレノイドは通常開いており、ECUからの通電によりソレノイドは閉じ油圧の往来ができなくなる。 SV3・SV4については、通常閉じておりECUからの通電によりソレノイドは開き油圧の往来が可能となる。
いま、走行中に前輪へのブレーキが必要な状況と判断されると 加圧ポンプに通電がされ電磁モーターポンプP により発生した油圧は逆流防止弁3aを通じてSV2を経由してBC1・BC2にブレーキ圧力が加圧される。 途中SV1を通電しておくことで レバー側へ圧力が逃げることを防止できる。 BC1・BC2に加圧された油圧力は、SV2に通電することでSV2は閉じ 一定の圧力を維持することができる。 走行状態に変化が生じ、ブレーキが不要となれば、加圧されたブレーキ油圧をSV3に通電することでSV3を開き 圧力のかかった油はリザーバーFへ戻され BC1・BC2の圧力は減圧する。 この一連の動作のなかで、ライダーによる意図的なブレーキがかけられた場合 MC−Fにより発生した油圧は 圧力を下げないとブレーキの固着と間違えられる可能性がありライダーをビックリさせる原因となりかねない。
詳細を説明すれば、
後輪は、マスターシリンダー(MC−R)により油圧に変換され、発生した油圧は SV5(ソレノイドバルブ5)を通過し SV6を通過して BC3のブレーキシリンダーへ圧力が加えられ、ブレーキがかかる。 ブレーキが放されれば、BC3にくわえられた圧力は 圧力が加えられた順路をさかのぼり 経路たどってMC−Rを押し戻す。 ECUによるコントロールのないコンベンショナルな動きとしては、SV5・SV6の電磁ソレノイドは通常開いており、ECUからの通電によりソレノイドは閉じ油圧の往来ができなくなる。
いま、走行中に前輪へのブレーキが必要な状況と判断されると 加圧ポンプに通電がされ電磁モーターポンプP により発生した油圧は逆流防止弁6bを通じてSV6を経由してBC3にブレーキ圧力が加圧される。 途中SV5を通電しておくことで レバー側へ圧力が逃げることを防止できる。 BC3に加圧された油圧力は、SV6に通電することでSV6は閉じ 一定の圧力を維持することができる。 走行状態に変化が生じ、ブレーキが不要となれば、加圧されたブレーキ油圧をSV7に通電することでSV7を開き 圧力のかかった油はリザーバーへ戻され BC3の圧力は減圧する。 この一連の動作のなかで、ライダーによる意図的なブレーキがかけられた場合 MC−Rにより発生した油圧は 圧力を下げないとブレーキの固着と間違えられる可能性がありライダーをビックリさせる原因となりかねない。
図の左側には入力信号が示されており 車両の挙動を検出する図1で示される各センサーと 図2で示される前輪後輪ブレーキの油圧系圧力を検出する圧力センサーP/S−F 及び P/S−R が入力されている。
各センサーからの信号を演算処理マイコンの各ブロックで適切な演算を行い 結果として図の右側に示されるアクチュエターへの出力として 加圧ポンプモーターPへの通電 及び SV1〜SV8のソレノイドバルブへの通電 を行う。
図2の油圧系の構成と図3のECU構成は 紙面の都合上 別々に記述されるが、近年の技術進化により、油圧バルブ・油圧ポンプなどの油圧系の小型化や 制御マイコンの処理能力の向上 通電コントロールを行う半導体の進化により 油圧コントロールユニットと電子制御ユニットの一体化が可能になってきている。
また、ブレーキ構成についても前後独立型で説明しているが 連動ブレーキによるコンバインド型との組合せに対しても応用が可能なものである。
図3で示されるアクチュエター出力であるもう一方の破線で示される部位は モーターブレーキ制御系出力であり、図4で示されるモーターシステムでの構成とリンクされており、表記したものである。
ライダーは、車両を走行させる際 多かれ少なかれバランスをとりながら走行させている。 ここで云うバランスとは、二輪特有に存在する転倒を避けるために行う重心移動や加速減速の行為であったり、積極的に車両を旋回させたりするための操作、荷重移動のことを示唆している。 バランスが崩れると時には転倒に至る場合が存在する。 安定している状態とは、このバランスが取れている状況のことを指し 不安定な状態とはバランスしている状態から外れていること ライダーの意思から外れた状態になること を意味している。 ライダーは意識の如何を問わず車両の重心位置を左右に傾斜させコーナーを通過している。
旋回に必要な逆操舵は不安定な操作とはいえない。
誤解を生じないように記述すれば、
走行中の二輪車には、外見から捕らえる鉛直方向と90度向きの異なる水平方向の遠心力が 旋回中の二輪車には加わってバランスを保ち走行しているが、車両に取り付けられたGセンサーは 水平方向の遠心力を直接計測するものではない。 車両に取り付けられたGセンサーは、傾斜された車体の横方向の力を検出するもので 遠心力と重力のベクトル合成された力を 車両の傾斜角をもって検出されたものである。
メカニズムを以下に説明する。

α=V^2/r
の計算式で算出することができ、速度Vの二乗を旋回半径rで除したものである。
二輪車には、重力加速度(g)と 遠心力(α)が 90度の角度関係を有して働くため バンク角(Φ)に応じた、遠心力(α)と重力加速度(g) との関係を三角関数の次式で 求められる。
となり、旋回半径(r)は
r=V^2/(g×tanΦ)
となる。
表1は、これらの関係を速度とバンク角をパラメータとして表記した。
言い換えれば、遠心力は旋回半径や速度には依存せず バンク角により一律に 定まるため 走行時のバンク角と遠心力の関係をみれば車両の走行状態の推定が可能となり、 安定状態にあるのか 不安定状態で転倒の可能性が迫ってくるのか 判断できることを示唆する。
次ぎに、システムの詳細と一般的な車両構造及び運動解析の説明に移る。
現在市場で量産されている二輪車には、ライダー負担を少しでも低減できるよういろいろ工夫がされている。
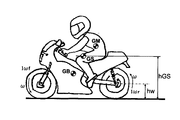
このトレール(Lt)は、制動時には 制動により発生する荷重移動により前輪の緩衝装置(ダンパーDF)の長さが短くなり、トレール長(Lt) が短くなる様に機能する。
このトレールが短くなる現象は、ハンドルの操舵によるタイヤ接地点の移動によっても発生する。
走行時であれば、合成重心の前後にあるタイヤには走行速度、即ちホイールの回転に応じた角運動量(I・ω)が存在する。 ここで記述されるIは、タイヤ軸を中心軸とした回転による慣性モーメントであり、走行から生じたタイヤ回転速度ωであり角速度である。
前輪には I・ωf、後輪にはI・ωr とし存在し 合成重心(GS)は車輪から発生するジャイロ効果に はさまれた位置関係にあることから 車両の安定走行が可能となっている。 ジャイロ効果については、後述する。
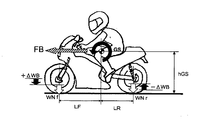
図には、合成重心(GS)から前輪タイヤ中心軸までの距離(LF)、後輪タイヤ中心軸までの距離(LR)が図示される。 この重心(GS)からタイヤ中心までの距離(LF、LR)によって重心での荷重配分が決定され、 前輪にはWNf 後輪にはWNr の荷重が発生する。
走行中の車両にブレーキが掛かると、それに伴う車両の減速G(Gαb)が発生する。
この発生する減速G(αb)に応じた力が、重心へ荷重移動する力(FB) として働き FB=GS×Gαb として働く。 この力、FBにより後から前への回転モーメント(一般的にピッチ方向と呼ばれる)として作用し 前後輪の荷重変化 ΔWBが発生する。
として算出できる。
この発生した荷重変化により、前輪には ΔWBの荷重が増え、後輪にはΔWBの荷重が減る。
Wr=WNr−ΔWB
となる。
旋回中の重心点GSには、前記したように 2つの力 重力による鉛直方向の力(=GS×g)と 遠心力(αc)による力 (=GS×αc) が発生している。
車体中心線(一点破線)と重力加速度gの加わる垂直線との角度を 車体の理論傾斜角(Φ)と定め 走行時に重心から車両荷重が路面接地点に加わる荷重点aによる傾斜戻り角(ρ)と定め、 Φとρの関係は 車両及びタイヤにより特有の関係が示される。 簡略化するために、ρはΦの一次関数と定義し ρ=Φ(1−Kp)として表記すれば、実傾斜角(Φ−ρ)は、 Φ−ρ=Φ・Kp と定義し 表すことができる。
Φe=Φ−ρ=Φ・Kp であるため、係数をかけなければならない。 実際の角度は理論角度より小さいものであるため 実角度(Φe)<理論角度(Φ) の関係にあることから 補正係数Kpは Kp≦1 として取り扱うことができる。 ある二輪車の経験値であるが KP=0.85程度であることがわかっている。
ここで、オーバーターニングモーメント Mot=Δab×Frun の要素Frunは、2つのベクトル 重力と遠心力の合成になっており 遠心力αcは 前記したように
αC=V^2/R に関連する。
図8(a)に戻り説明する。 図に示される遠心力(αc)を車体バンク角(Φ)で傾斜する二輪車に取り付けられた Gセンサー23 から、傾斜とGセンサーの関係を関連づけし 分析することはできない。
すなわち、実際にテストしてみると傾斜角から求めるGセンサーの値と走行時のGセンサーの値は一致しない状況に陥るが、過去多くの先願がこの方法で公開されている。
この一致しない状況において、本出願は解析し一致する演算式を導くことができた。
一致しない要因は少なくても 4つ存在して折り説明する。
すなわち、紙面上では 停止時の傾斜と走行時の傾斜は同一とみなしており 走行時に発生する実際の遠心力とバランスされる関係が考慮されない点にある。
もしくは、停止時の重力ベクトル(g)と遠心力ベクトル(B)は表記されても実車に搭載されるGセンサーの検出軸Gken(図中の破線)にベクトル投影する際 重力成分ベクトル(C)は投影しても 遠心力成分ベクトル(D)を投影しない ベクトルの抜けが生じるところに問題がある。
その原因は、走行時のバイクは遠心力を相殺するために傾斜バランスをしているため検出されないことと誤解されてしまい 実際に検出される出力値は誤差として扱うことがあげられる。
以上の4点を加味することで、車両挙動の検出として 走行時に発生する傾斜時の横方向加速度を検出する加速度センサー23 を車両挙動検出センサーとして用いることが出来るようになる。
車体の挙動を検出するためにハイブリットセンサー20 が、車両倒立時の車体中心線(図中の一点破線)にレイアウトされる。 ハイブリットセンサー20 には、進行方向の加速度を検出する加速度センサー21、 進行方向ロール速度を検出する傾斜角速度センサー22 及び ロール方向の加速度を検出する加速度センサー23 が小型に内蔵されおり、ライダーの体重を含めた合成重心に近いところにレイアウトされる。 ハイブリットセンサー20 には、傾斜時に生じる理論バンク角(Φ)及び傾斜によってタイヤでの荷重接地点変化から生じる戻り角(ρ)が同時に存在している。(図8も同時参照)
センサー20 に生じる力(ベクトルA)と 実際に生じる力(ベクトルA’)とは ずれが生じている。 このずれ角(戻り角(ρ))によって、正確な横Gを検出することが解析された。
戻り角は、横Gセンサーで検出される横G値検出に直結する角度のことであり、傾斜走行時のタイヤの路面接地点が直進走行からの移動から生じ定められる角であることが(図8b))及び(図9)のρで表される角度である。 この戻り角は、車体の傾斜角に伴うものであり、直進路走行時は発生せず傾斜角(Φ)の一次関数で定義されることが(0049)に記述されている。
(図8b))により、戻り角を規定する車両上における構成要素は、鉛直線と、車体中心を示す車体中心線と、車体中心線上にあり横Gセンサーが取り付けられている場所の高さポイント(Phsen)、直進時のタイヤの路面接地点の中心のポイント(b)と、傾斜時のタイヤの路面接地点の中心のポイント(a)から規定される。
以上のことから、走行傾斜時に検出されるべく横G(Gken)の考え方は、
Gken = (ベクトル(C))−(ベクトル(D’))−(Ψ) となる。
Gken = (g・sinΦ)−{A’・cos(90−Φ+ρ)}・cosΦ
−(Ψ・Rsen)
式を整理し
Gken =g{sinΦ−tan(Φ−ρ)・cosΦ}−Ψ・Rsen
ρは、前記したように Φの一時関数とするとき
Gken =g{sinΦ−tan(Φ・Kp)・cosΦ}− Ψ・Rsen
を導くことができる。
Gken = g・cosΦ・tanρ − Ψ・Rhen
と変形でき、シンプルな式になる。
ここで、表されるΦは 車両の理論バンク角度であり理論傾斜角でもある、 傾斜角速度センサー22 から検出される角速度Ψ(rad/sec) を時間積分して得られた角度であり、ρは傾斜戻り角であり、RはGセンサー#23の実車取付けの高さ(図8b hsen )をそれぞれ示している。
ここでのセンサーの配置と検出について明確にする。
センサーの配置については、(0061)文中にも「・・・路面との距離hsenがあり、センサーはタイヤを軸とする円周上軌跡を通過する・・・」ことが(0062)式の「・・・(Ψ・Rsen)」で記述される。 センサーの検出方向としての軸は、横方向の加速度であり、(図8b))及び(図9)のGkenが示す方向であり、前記の円周との接線といえる。 すなわち、車体の倒立が鉛直線と一致するとき車体中心線は鉛直線と重なり、円周上の半径hsenで定まる高さのポイントも前記の接線も一点で合致し横加速度補正に用いるRsenは理想に近づく。 しかしながら、センサーの実車への配置が車体中心線から離れると円周上の軌跡とGセンサーの検出方向(接線)とが離れていく事象が生じることから、Rsenとhsenが等しくならず無視できない状況に陥ると傾斜角度による補正などが必要になってくる。 よって、センサー配置は重心位置近くであり車体中心線上にあるのが望ましい。
その式の書き方により
Gkihan = g{sinΦ−tan(Φ・Kρ)・cosΦ}
= g{sinΦ−tan(Φ−ρ)・cosΦ}
= g・cosΦ・tanρ
と変形でき 使用しやすい形態を選択すればよい。
この式を導くために、実際の二輪車に搭載した角速度センサーから 理論バンク角(Φ)を傾斜角速度(Ψ)の時間積分による説明で誘導してきたが 上記式である
Gkihan = g{sinΦ−tan(Φ−ρ)・cosΦ}
= g・cosΦ・tanρ
には、傾斜角速度のパラメータは存在しておらず 理論バンク角(Φ)と傾斜戻り角(ρ)により、一義的に求められることが明確である。
ここでのGkihanとは、理論検出横Gであり、「二輪車の傾斜時に発生する理論検出G(規範Gと呼べる)を導く理論式・・・車両挙動の判断とするための基準・・・」であることが(0011)にも記述される。 この傾斜時とは、走行時に発生する角度であり、その際に横加速度が発生しセンサーより検出される値が検出Gであり、理論とはバンク角であり理論傾斜角を意味している。
車両に搭載された車両傾斜角度検出機能により、車体中心線と鉛直線との成す傾斜角度を検出 又は算出された理論バンク角度(Φ)及び 直進走行時のタイヤ路面接地点と傾斜走行時のタイヤ路面接地点の位置移動によって定義される理論バンク角の傾斜戻り角(ρ)より、理論バンク角から傾斜戻り角を減算した実バンク角(Φ−ρ)値を算出し、走行時に発生する左右横方向加速度の理論検出横G(Gkihan)を式、
Gkihan= g{sinΦ−tan(Φ−ρ)・cosΦ}
または
Gkihan= g・cosΦ・tanρ
から 傾斜時に発生する横Gの算出を傾斜角から求める機能を備えることを特徴とする自動二輪車の横方向加速度の規範値検出に関する検出方法。は、
上記「0066」で説明される様に 傾斜角速度のパラメータは存在しておらず 理論バンク角(Φ)と傾斜戻り角(ρ)により、一義的に求められることから一般式化している。 よって、理論バンク角を求める手段は無数に存在するため、「車両傾斜角度検出機能」と表現し、その検出方法について限定することを取り除いた。 同様の意味で、直接角度を検出できるセンサーでも 本実施例で説明してきたような角速度の時間積分により算出される角度でも角度を検出することは可能であるから、センサーの出力形態を問わず検出方法を限定する表現を取り除いた。
「車体中心線と鉛直線との成す角度」と表現したのは、直進走行時に倒立した状態を理論バンク角(Φ)ゼロ度とおき、重力加速度の向きと一致させることで、左右方向の実傾斜角(Φe)を求める際の減算(Φ−ρ)の部分の演算を単純化するために(Φ・Kρ)と置き換えるができる形態とした。
= g・cosΦ・tanρ
は、傾斜戻り角は存在するものの、表1で説明された 遠心力はバンク角度に依存する と矛盾しておらず 昔から慣れ親しんだ 遠心力 α= V^2/r の事象を捉えるものである。
この式で表現される 傾斜戻り角(ρ)の測定方法は 様々考えられるが 二輪車の仕様によって定められるタイヤ選択から決定される因子が強い。
よって、3つの計測方式を列記しておく。
実際の走行傾斜時に検出される検出横G(Gken)は、傾斜角の時間的変化である傾斜角速度(Ψ)を用いた補正が必要であることから 補正後の横G(Ghosei)は
Ghosei = Gken−(Ψ・Rhsen)
として表される。
この補正後の横G(Ghosei)は、
(0063)式のGkenから傾斜角速度(Ψ)を用いた補正であり、(0067)の式に対して、傾斜角が変化しない状況である。 すなわち、式の「Ψ・Rhsen」の項については、ゼロとなることから二つの式を整理し記述すると、上記のGhoseiの等号式は、
Ghosei=Gken=g・cosΦ・tanρ=理論検出横G(Gkihan)
の関係となる。 この様に、式の「Ψ・Rhsen」の項について、ゼロにしたデーターは、定常円旋回時に得られたデーターと呼ばれることがある。
そして、これらの理論検出横Gの上記等号式に関わる上記変数には、傾斜角の範囲全体に渡り、傾斜角に応じ検出される車両特有の横加速度の数値が関係として導かれる。
Grol= 0.25*3.14*1 = 0.785 「m/s^2」
(但し、センサー取り付け高さ Rを1mとする。)
であり、重力加速度 9.81 「m/s^2」 との影響度は 0.785/9.81を算出すると 約8%となり制御を考える際、無視できない項目であることが分かる。
よって、補正の必要性が裏づけされる。
傾斜時の規範横G(Gkihan)と 実際に走行時に発生する補正を行った横G(Ghosei)から、目標値を得るための制御値を求めるには 偏差をとればよい。
すなわち、スムーズで安定した走行でいるときには 前記したように規範Gとなることから 補正後の検出横Gと規範Gとの差分を下記の式から 偏差G(Ghensa)を
Ghensa=Ghosei−Gkihan
求めることができる。
前輪軌跡(A)と後輪軌跡(B)は、旋回時のタイヤ軌跡を表している。 図中の破線は、前輪と後輪の接地面を結ぶ延長線が示してあり 後輪の駆動する方向を示している。
直進時であれば、軌跡(A)と軌跡(B)は同一軌跡を通過するためスリップアングルβrは生じないためゼロになる。 旋回状態となり、倒立状態からバンク角が次第に深くなって行くに従い、軌跡(B)は 軌跡(A)から徐々に離れていき 内側を通過するようになる。 軌跡(A)と軌跡(B)の軌跡半径の差は、走行速度が高いほど軌跡半径の差は小さく 走行速度が低くなると軌跡半径の差は大きくなってくる関係あり、走行速度によって異なってくる。 すなわち、走行速度と傾斜角がわかれば軌道推定をしたり、予めテーブルデータとして用意することが出来る。
スリップアングルβrは、軌跡半径の差が大きいほどスリップアングルが大きい関係となる。 詳細については、後述する。
その例を図11で説明する
後輪は横方向にスライドしながら落ち着くべき軌跡N.S.(ニュートラルライン)に収斂される。 これは、走行時に生じるタイヤ回転差の吸収と 後輪タイヤの荷重変化をスムーズに受止めるために発生する横すべり現象である。
前記した様に、ロール方向の角速度を時間積分して理論傾斜角度(Φ)を算出し、傾斜戻り角(ρ)による補正係数(Kp)を用いて実傾斜角(Φe)を求め、実傾斜角に基づいた横加速度の検出が可能となる。
前輪は、後輪に比べ切返しを行っても横滑りが発生しにくいようにハンドル操舵による微調がとれるようキャンバーアングルとよばれる前輪スポーク角の設定で自動調整され、前輪ターゲットラインを通過できる。 しかしながら、前記した様に後輪は走行軌跡の距離の違いから発生するスリップ率を吸収する必要があるため、走行状態によっては横滑りを伴い 前輪ターゲットラインとは異なるもう一つのN.S.軌跡が存在している。 このN.S.ラインを走行すれば、傾斜走行時の重力と遠心力のバランスが取れた状態になることであり 車両挙動としても安定しているとみなしてもよい。 切返しからN.S.ラインまでの車両挙動をアンダーステアー(U.S.)状態、 N.S.ラインで留まらずさらに横滑りが発生する状態であればオーバーステアー(O.S.)状態と定義づけできる。
Ghosei > Gkihan の関係にあることから、オーバーステアー(O.S.)と判断でき 走行軌跡は小さくなっていく方向になる。
前記したように、アンダーステアーは旋回外側に走行軌跡が膨らむため 車両挙動としてバンク角が深くなる状況では前輪への配分を多くし、バンク角が浅くなる状況では後輪への配分を多くする。
図19説明に入る。 中央部の天秤にあたるところは、前後輪への制動力配分であり目標油圧の配分でもある。
天秤左側は、目標制動力が入力されるが 補正項として「OTM」「車両重量」「推定軸荷重」など要素で、目標制動力の補正がされる。 天秤右側には、前後輪への配分された目標油圧が出力され 前輪後輪ともにPIDコントローラーによって油圧目標値になる様に電磁バルブとモーターの両方をコントロールする。 油圧フィードバックは、油圧の圧力検出信号であり PIDコントローラーの出力結果でもあるが 油圧系の温度による伝達特性の応答性改善にも使用することができる。
天秤のバランスであり目標の配分にあたる配分比を決定するのが、 Ghensaと傾斜速度変化である角速度(Ψ)である。
車両に搭載された車両挙動検出用センサーとして、進行方向に対して左右横方向加速度を検出する加速度センサー 及び 進行方向に対して左右ロール方向角速度を検出する角速度センサーを少なくとも搭載する車両において、
「請求項1」の車両傾斜角度の検出を 角速度センサーから検出された角速度出力(Ψ)の値を時間積分して得られる車体の理論バンク角(Φ) 及び 直進走行時のタイヤ路面接地点と傾斜走行時のタイヤ路面接地点の位置移動によって定義される理論バンク角の傾斜戻り角(ρ)より、理論バンク角から傾斜戻り角を減算した実バンク角(Φ−ρ)値を算出し、走行時に発生する左右横方向加速度を
1)、 傾斜走行時の理論検出横G(Gkihan)を
Gkihan= g{sinΦ−tan(Φ−ρ)・cosΦ}
または
Gkihan= g・cosΦ・tanρ
の式を用いた規範G値の算出、を行う「請求項1」の具現化した算出方法
2)、 走行時に変化する実際の検出横G(Gken)を少なくとも傾斜角の時間微分 (dΦ/dt)値である傾斜角速度(Ψ)を用いた補正を行い、補正後の横G(G hosei)を
Ghosei= Gken−(Ψ・Rhsen)
の式を用いて補正した値の算出G値、
3)、 1)から求めた理論検出横G(Gkihan)と 2)から求めた補正後の 横G(Ghosei)の差分を算出した 偏差横G(Ghensa)を
Ghensa= Ghosei−Gkihan
の式を用いて偏差の値の算出G値、
上記1)、2)、3)から、3種類の横G値 Gkihan、Ghosei、Ghensa、を算出し 車両の挙動を Ghensaの値から、
Ghensa ≒ 0(ゼロ) ならば ニュートラルステアー(N.S.)
Ghensa > 0 (正)ならば オーバーステアー(O.S.)
Ghensa < 0 (負)ならば アンダーステアー(U.S.)
と判断され、 Ghensaの符号と値に基づき 演算式 又はテーブルに従って、前輪後輪へのブレーキ配分が決定される事を特徴とする二輪車のブレーキ装置、
について説明する。
規範横Gは、 Gkihan= g・cosΦ・tanρ の様に表される。
Ghosei=Gken−(Ψ・Rhsen) の様に表される。
ここで補正項として傾斜角速度を加味している理由は、前記したように制御上無視できない要素になっているためである。 その他にもセンサー取り付け高さが加速減速による高さの変化、タイヤ空気圧、タイヤ横ずれ量 等々により変化するなど、補正項は考えられるが重要なものに絞る。
制御値として演算することを意味している。 よって、傾斜時の規範横Gと補正後の横Gとの差分を偏差横G(Ghensa)として式で表し、
Ghensa=Ghosei−Gkihan
を求め制御偏差としている。 この偏差が大きければ、横滑りもしくは急な起きあがり事象 倒れ込み事象 が発生していることを示唆している。
よって、Gkihanは、ある傾斜角の時に既に定常円旋回などから得られたデーターを基に数値が導かれている。 Ghoseiは、上記のある角度において変化する傾斜変化の補正を行った定義上の傾斜変化ゼロの横Gであるため、リアルタイムに補正されたデーターには外部から加えられた車体のロール因子以外のGが数値として含まれている。 偏差横Gは、時々刻々と角度が変化することへの追従されるGとする為の式であり、ある傾斜角における外部から加えられた横加速度であり、重量を掛ければ加えられた外力となる。
また、角速度検出センサー22 から算出した傾斜角より 規範旋廻半径 Roを次の様に求めることができる。
Ro=V^2/α=V^2/(g・tanΦe)
となる。 αは、横加速度であり、 Φeは 図9で示す実傾斜角である。
誤解を招き易いため記述するが、走行中の安定した車体には表1で示される車体傾斜角に
応じた遠心力が常に加わっているが、傾斜走行中の二輪車はバランスをとっているため二
輪車に搭載されたGセンサーとしての検出Gは 前記の様にタイヤの傾斜戻り角(ρ)成
分に関係した僅かなG値になることである。 走行中に車両が不安定になると、重力に対
する傾斜角と遠心力とのバランスが崩れるため Gセンサーの検出値には車体に係るG成
分が計上され大きなG値になり検出される。 Ghensaの値を監視しておくことで、
走行時のバランス状態を簡単に検出することができる。
図19に戻り説明する。
図19中央部の天秤の部位を拡大したものが図23である。図23の説明に入る。
縦軸は前後ブレーキ配分、横軸は車体の傾き変化である角速度を示している。
車体の傾き変化が、傾斜側か倒立側かによって、前後配分比は変化する。また、車両状態すなわち、アンダーステアーが大きければ前輪への配分が大きくなり、オーバーステアーが大きければ後輪への配分が大きくなることを示している。
Ghensaは、現在の走行状態が破線で示される U.S./O.S./N.S.のどの位置にくるのかを 符号と絶対値により配分比が見える様に示したものであり、Ghensaが配分を決定していることが表される。 横軸は、角速度(Ψ)であり車体が傾斜方向と倒立方向に分かれている。傾斜角度ではない。
具体的に一例を説明すれば、仮に傾斜走行中に傾斜角度に変化がないとすると 前後ブレーキ配分は縦軸上になり Ghensaが示す符号と絶対値で 配分比が定まる事を意味している。 U.S.状態にあれば、前輪が80% 後輪が20% O.S.状態にあれば、前輪が20% 後輪が80%になる事を示している。 注意したいのは、 N.S.状態にあるときで際も 前輪50% 後輪50%の状態からオフセットされた状態にあることである。 また、この U.S./O.S./N.S.の線の引き方により Ghensaと角速度変化に応じた 前後輪へのブレーキ配分の重み付け変更が可能である。 引き方は、直線とは限らない。 ここで示している配分比は、説明のために用いたものであり配分比を限定するものではない。 ブレーキの作用については、後述する。
Gセンサー及びロールセンサーは、多少なりとも出力のオフセットや温度ドリフトが存在する。 このドリフトをキャンセルするために 各センサーのゼロ点をECU内で学習値として憶えこませる必要が存在する。 様々な方法が存在するが、一つの提案として 走行時からの減速を行った際、完全に停止するまでの車両挙動としてロールセンサーとGセンサーの値の変化が一定値以下ならば ロールセンサーとGセンサーの倒立学習条件が可能であることを示唆している。 なぜならば、傾斜走行を行っている傾斜角のままで減速していくと前記した速度と傾斜のバランスの関係から必ず逸脱してしまうからである。
次に、ブレーキの効果について説明する。
前輪は、ハンドルの左右操舵機能が備わっているため 図10で図示した操舵アングルβ に加え 実際の進行方向とのずれ角が生じでおり タイヤスリップアングルβfを定義する事が加わってくる。
すなわち、制動による荷重変化とトレール距離(図5 Lt)の変化に伴い 荷重中心点の移動(j→k)が 前方方向に移動していることが表現される。
荷重ポイントの移動(j→k)は、前後方向以外にもサイドラジアスからセンターラジアス方向への横方向移動も生じる。 (センターラジアスとは、バイクが倒立時に路面接地する中央部であり、サイドラジアスとはバイクが傾斜時に路面接地する肩にあたる部分である。) このポイントの移動は、ブレーキ時のフロントダンパーの沈み込みにより いっそう発生するものである。 ポイントの移動(j→k) は、ブレーキにより路面からうけるタイヤへの外力モーメントとして働き 作用/反作用の関係から路面からの反力(k→j)をうけ 反作用のベクトルが発生すると見立てられる。 よって、ブレーキ時には ハンドルは切れ込む方向のアライメントトルクが発生する。
公転の角速度ΔΩとタイヤの角運動量Hとのベクトル積は、外部から加えられたトルクに等しいことから、角運動量Hが一定で、外部トルクにより 微小時間Δtの間に Δβの方向変化が生じたとすれば、
Δβ=Ω×Δt として、関係が導け Ω=Δβ/Δtとなる。
よって、Ω×H=T の関係から
T=Ω×Hf
=Δβ/Δt×Hf (Hf=If×ωを代入して)
=If×ω×Δβ/Δt
ωはタイヤの回転速度である。
dHf=If×dω/dt と記述でき、トルク変化 ΔTは
ΔT=If×dω/dt×Δβ/dt
となる。
ここで、Ifは タイヤの慣性モーメントであり 実際にはタイヤとホイールの重量が該当する。 dω/dtは、ホイールの角速度の変化であり、路面とのスリップが起きていないとすれば ブレーキによるフロント車輪の減速度でもある。
車体の実減速度は、Gセンサー21 で検出しているため差分が求めることができるのでスリップ率の算出が可能である。
以上が前輪ブレーキの車体に与える影響である。
図14は、車両が直進(倒立)で走行している状況を右側面から見た図であり、後輪周辺の構造とブレーキ時の作用を図示したものである。 後輪のシャフト中心軸は、図示されているようにリヤアームに固定されており 車体フレーム支持点aを中心とする上下方向の運動が可能なように制限されている。 リヤアームは、ダンパーを経由し車体フレームに接続される。 リヤブレーキにより、路面にブレーキ摩擦力(FBr)が発生し車体には 反力として逆方向の力の発生とホイール回転速ωに −Δωの変化が生じ、リヤアーム(Larm)長による沈み込みモーメントが発生し、リヤのダンパーを 図の矢印(P)の方向へ縮め 重心を下げる方向に機能する。
図10は、前記したように 旋回時の前輪タイヤの軌跡(A)と後輪タイヤの軌跡(B)が示してある。 直進時は、軌跡(A)と軌跡(B)が ほぼ同一軌跡を通ることは明らかである。 しかし 車体速度を一定とした旋回の場合 バンク角が深くなるに従い 旋回半径が小さくなっていき 軌跡(A)と軌跡(B)の軌跡の 距離がはなれていくことは前記した。
つまり、前輪と後輪の傾斜走行の軌跡距離は異なり、旋回に必要なタイヤ回転速度も前輪と後輪では異なってくる。 通常のグリップ走行と呼ばれる安定した走行の場合、後輪が前輪の軌跡内側を走るアンダーステアー状態での走行になる。 後輪の速度の方が旋回内側に位置しているため 旋回半径の小さい後輪の速度は前輪速度に対して若干遅い必要性が発生する。
この前後輪の軌跡差 及び 速度差は、コーナー進入時の車体速度と傾斜の仕方に関係するところがある。
このような状態で、誤ってアクセルを開けると駆動力によるスリップが発生しやすく後輪の慣性モーメント(図11 Hr)及び スリップ率の向上によるジャイロ効果が発生し 副作用として旋回外側に押しやるモーメント力(図11 ΔΩr)として挙動に現れ 後輪の挙動が不安定となり、簡単に転倒に至る場合がある。 通常、経験的にこのような状況にならないように 傾斜角が増していく旋回状態では後輪ブレーキを軽く作動させながらコーナーへ進入し タイヤと路面とのスリップ率を下げるようにすることで 後輪の挙動を安定化させたりしている。
傾斜からの早い起き上がり及び逆方向への切り返しは、旋回中の遠心力によるダンパーの圧縮と掛かる荷重がバランスをしていたものが 傾斜による遠心力が低下するとダンパーは伸張とロール方向の遠心力により早い切替し が可能となる。 しかしながら、その早い切替しは 倒立点通過時の荷重抜けの原因となってしまい挙動の安定性を欠く原因となる。 これは、ロールによる作用・反作用の力が関わっており 倒立開始から中立点まではロールによる作用が路面(旋回中心側への求心力方向)を押し付けることができるため反作用が働くが 中立点から先の傾斜時になるとロールの反作用は路面を押し付けることができない。
後輪ブレーキは、路面との実傾斜角により車両のコントロールが変化する点に留意しなければならない 特異点があり 図15で説明する。
すなわち、後輪ブレーキによる効果は 実傾斜角Φeが45度を境に 45度より傾斜角が浅ければ 倒立方向に働き、45度より傾斜角が深ければ転倒方向の傾斜角が深くなるように働く。 言い換えれば、傾斜角が45度を超えるような深い傾斜での走行は、前記のように路面を押し付ける重力方向の力よりも タイヤを横滑りさせる遠心力成分の力が大きくなるため タイヤブリップの限界を超える可能性もあり 横滑りを引き起こす原因になるため 習熟が必要となってくる。
ただし、これはブレーキによる荷重変化に対して説明したものであり、実際には路面状況の変化に加え ブレーキに伴う車両の速度の減速 及び 重心GSが路面を押し付ける遠心力と重力の関係(図13上のベクトルFrun)が連続的に変化するため 複雑になってくるため、さまざま補正を必要とする。
また、後輪ブレーキは ブレーキ力による後輪の沈み込みによる荷重移動が発生し 前輪荷重を低減する効果があり、車体としては弱い減速を行うことができるため 前輪がブレーキを掛けることのできない状況下でも 前輪の負担を軽減させることが可能であり、前後輪の連携したブレーキが効果的であることがここからの伺い知ることができる。
1)直進状態から車体を傾斜させていく場合、傾斜しにくい状況下ではリヤブレーキを かけ傾斜しやすいようにブレーキによるアシストをおこない、傾斜し過ぎる状況下で はフロントブレーキをかけ傾斜しづらいよう ブレーキによるアシストを行う。
2)傾斜走行から車体が直進状態への起き上がり または さらに逆傾斜方向への速い 切り替えしが発生する場合、リヤブレーキをかけ後輪への荷重増加 および リヤタ イヤのスリップ率の向上によるグリップ力の低減効果により、起き上がりしづらいよ うブレーキによるライダーのアシストを行う。
3)車両としてのバランスを保つために、前輪だけ、後輪だけのブレーキだけではなく 前後輪効果的に連続的に配分することで 自然な減速感とマイルドな車体挙動にな るようコントロールするために 前後輪へのブレーキ力配分が必要となる。
車両に搭載されるABS(アンチロックブレーキシステム)システムのブレーキ加圧をライダーの操作に依らず 加圧制御できる油圧ポンプ付ABSシステム搭載車において、搭載される車両挙動検出用センサーにより、前後輪荷重、前後輪速度、車体速度、車体加速度 及び 傾斜角度、傾斜角速度、傾斜角加速度、などの車両挙動・走行状態の演算処理を行うブレーキ制御ユニット(ECU)は、
走行中に発生した、傾斜角度・傾斜角速度・傾斜角加速度の各値が 予め設定される閾値を超える状態が検出された場合、車両が転倒する危険性が高まっていると判断され、車両挙動の 傾斜角度・傾斜角速度・傾斜角加速度が予め設定される閾値以下になる様に 車体減速度の演算 又はテーブルによる演算より 目標減速度の算出を行い ブレーキ圧力の加圧減圧のコントロール 及び「請求項2」により決定される油圧配分コントロールが決定される 自動加圧制御付きABS装置車両の提供。は、
車両の挙動把握として 車両速度・傾斜角度・傾斜角速度・傾斜角加速度 の検出に必要な 車両進行方向の加速度が測定できる加速度センサー21、進行方向の左右傾斜角速度(ロール速度)を測定できる角速度センサー22 及び 進行方向に90度向きの異なる左右の横加速度(ロール方向)を測定できる加速度センサー23 及び 前後輪のホイール回転速度センサー24・25 及び 前輪後輪のダンパーの距離を測定するストロークセンサー26・27 などの制御に必要なセンサーを車両に搭載し、それらの情報から必要な演算処理をすることで、 傾斜角度・傾斜角速度・傾斜角加速度の各値が得られ 予め設定される閾値を超える状態が検出された場合、その車両挙動が予め設定される閾値以下になる様に 傾斜角度・傾斜角速度・傾斜角加速度の各値と「請求項2」による車両の状態把握(U.S.か、O.S.) 及び車両の速度によってブレーキ制御量・ブレーキ制御配分量が決定され 決定された前後輪の制御量に基づき 前後輪ブレーキのブレーキ力の加減コントロールを行い、車両が安定走行状態に復帰できるよう ライダーへのアシストブレーキを行うものである。
と表現していることは、ライダーへのアシスト(補助)として 自動加圧制御付きABS装置の出力である制動力 及び 制動力配分が行われた場合には 危険な状況・不安定な状況に隣接される状況にあることから その状況から安定な状況へ遷移するためにある程度 制御状態を続ける意味が込められている。
言うなれば、動作に対して、ヒステリシスを持たせる、閾値に幅をもたせる、動作停止時間を遅らせる、ことを表現したものである。
予め設定してある車両挙動である「速度とロールの関係」を超える状況が発生すると走行速度と走行時の傾斜変化に合せ ライダーの意思に依らず 前後輪のブレーキを掛けるシステムであり ブレーキを掛けることにより 車両の減速の仕方をコントロールするが 車両にかかる遠心力をコントロールすることになり 車両の左右ロールモーメントのコントロールを行うものである。 車両の傾斜角の変化が、所定の「速度とロールの関係」の範囲内になれば システムによる自動ブレーキは終了となり 今まで通りのライダーによるコンベンショナルなブレーキが活かされるライダーをアシストするブレーキを提供するものである。
図16 a)は、一定速度での走行状態において スムーズに左旋回が行われたときの 傾斜角とロール速度の変化の時間的経過で表したものである。 傾斜角度の時間変化であるロール速度Ψは 約5deg/sec(0.0278π 「rad/sec」)であり 低くスムーズな傾斜角の変化であることがみて取れる。
b)は、傾斜中盤(約4~7秒のところ)に急激な傾斜角変化が発生し車両が不安定になった状況を表現したものである。
ある程度傾斜している状況下で、急激な傾斜速度の変化が生じた場合 その発生した状況に伴い傾斜角が増えいくと 同時に理論傾斜角は深くなっていくためターゲット傾斜をオーバーした傾斜に至ってしまう。 ロールのエネルギーは、急に止まったり・逆方向にはならないため 最大傾斜速度が傾斜角度ごとに固有に存在しており それは速度により変化する。 一般的には、倒立付近では 速い傾斜角速度Ψの変化が生じても不安定にならないが、 傾斜角が深くなっていくに従い傾斜角速度が緩やかになるのが通常といえる。
その傾斜角度と傾斜角速度は、速度により変化し 車両の速度が高いほど前進方向の慣性力が大きくなるため傾斜し難くなっていく。 よって、「速度とロールの関係」も存在する。
図の△付線は、制御ありの場合を表したもので、 本装置が作動したときの傾斜角と傾斜角速度の変化で、予め設定してある 「角度と速度の関係」「角速度と速度の関係」の閾値を越える状況下(部位Ψ1)になると システムは自動ブレーキを作動させ傾斜角速度が一定値以下になるまで作動する。 しかしながら、さらに傾斜が深くなっていくと 再び「角度と速度の関係」の閾値を越える状況下(部位Ψ2)になり、自動ブレーキを作動させ傾斜角速度が一定値以下になるまで繰返し作動する。
図17、図18は、 図3ECU内部ブロック構成における 「規範ライダーモデル」 及び 「オーバーターニングモーメント算出」に関し、記述したものであり、MAPデータ化でイメージし易いよう図示も加えた。
図17は、目標制動力を求めるために 傾斜する方向(傾斜側か倒立側か)から理論バンク角(Φ)の時間変化 dΦ/dt から算出した符号によって制御データを切換えている。 本実施例においては、傾斜方向による角速度制御データと傾斜角加速度から得られた角加速度データとを加算し 目標制動力を求めている。 車両によっては、角加速度データを傾斜方向 又は倒立方向でそれぞれ別テーブルとして設ける必要が存在する。
それぞれの制御データは、ロール角速度(Ψ)・理論傾斜角度(Φ)・車体速度(VS)・ロール角加速度から実車特性を加味しセッティングして得られたデータを基に制御量が決定されている。
モーターへの通電によるブレーキは、油圧により発生するブレーキ力に加え モーターで発生するブレーキ力との合算で制御されるため、 図3 ECU内部ブロック図の構成の破線部で示される「前後輪の油圧減速特性の掌握」を行うためのロジックがより必要となってくる。 モーターでのメリットは、現状のABSシステムに対しては ほとんどハード的な変更をする必要がない事から追加的処置で自動ブレーキを付帯できることであること。
よって、前後輪のブレーキ油圧の加圧・減圧及び油圧配分を 走行速度と傾斜状態に応じて作動させることにより「速度とロールの関係」を逸脱しないようにコントロールできるので 車両挙動を常に安定化させることが可能となる。
ライダーへのブレーキアシストを行う上でもう一つ重要なのが、路面状況やライダーのスキルを考慮することが重要となってくる。 過剰アシストは、ライダーにとって憂鬱な存在であるため ライダーに合せて動作状況を変化させる必要性が生じる。
ここでは、ABSの動作については説明していないが 直進・旋回の如何を問わず常に車輪ロックしないように働いていることを前提としている。 但し、旋回中のスリップ率の変更などは施している。
油圧系のコントロールを早く操作してもON/OFFによる油圧系の脈動変化が生じる状況が車両制御において 無視できない商品性もあるため より自然な車両挙動を得られるように リニアバルブ(図示しない)と呼ばれる 通電電流に比例した安定した油圧出力を得られる部品(リニアソレノイドバルブと呼ぶ場合もある)を使用することで、油圧系の代替方法として可能である。
以上 本発明の実施例を詳述したが、本発明は上記実施例に限定されるものではなく、特許請求の範囲に記述された本発明を逸脱することなく種々の設計変更を行うことが可能である。
図2は、車両安定化ブレーキ制御装置の油圧構成を示したものである。
図3は、安定化ブレーキ制御装置の制御ユニットの内部ブロック構成である。
図21は、加速度センサー21の車両停車時の出力信号を示したものである。傾斜していない時、すなわち倒立時は2.5Vを出力している。左右の傾斜に伴い出力は変化する。傾斜走行時には、遠心力が加わり停止時の傾斜出力とは異なる。
図22は、傾斜角速度センサー22の出力信号を示したものである。
20 ハイブリットセンサー
24 前輪車輪速度センサー
25 後輪車輪速度センサー
26 前輪ストロークセンサー
27 後輪車輪速度センサー
30 ブレーキ油圧コントロールユニット
Claims (7)
- 所謂自動二輪車であり少なくても2つの車輪を有する車両に用いられるブレーキ制御装置であって、該ブレーキ制御装置は、車体速検出装置と、車両挙動検出装置と、ECU(コントロールユニット)と、制動装置と、で構成され、
車体速検出装置は、車輪速センサーであって、検出された信号より車両走行速度を得て、
車両挙動検出装置は、進行方向に対して左右ロール方向と左右横方向の状態を検出するセンサーであって、該検出された信号により傾斜角速度(Ψ)と横加速度(Gken)を得て、
ECUは、検出された信号演算と車両挙動に応じた目標制動力演算及び制動装置へ制動指令を行うものであって、前記信号演算として、横加速度を検出する加速度センサーのロールによる影響を取り除く演算を行った補正後の横G(Ghosei)の導出方法を少なくとも有し、
制動装置は、前記ECUからの制動指令により車両を減速させる機構であって、エンジンブレーキとブレーキディスクへの加圧減圧の手段を有し、
当該車両において、前記傾斜角速度(Ψ)と前記補正後の横G(Ghosei)の組合せにより、車両挙動が判断され、該車両挙動に応じた目標制動力が決定され、前記車輪で制動がされ、制動によりロール方向の挙動の抑制が図られること、を特徴とする車両のブレーキ制御装置。 - 前記車両のECUにおいて、
車両挙動検出装置から検出された傾斜角速度(Ψ)から、該傾斜角速度(Ψ)の時間微分で得られる傾斜角加速度(dΨ/dt)と、該傾斜角速度(Ψ)の時間積分で得られた車体の傾斜角度(Φ)と、の信号演算が少なくとも付加され、
前記車両の走行速度に対して、前記傾斜角度(Φ)と前記傾斜角速度(Ψ)と前記傾斜角加速度(dΨ/dt)の3つの値のうち少なくとも一つの値が、予め設定される範囲内になる様に、数式による演算又はテーブルによる演算を行い、前記目標制動力が決定されること、を特徴とする請求項1に記載のブレーキ制御装置。 - 前記車両のECUにおいて、
車体の傾斜角度に応じ横加速度センサーが検出する横加速度の関係を理論検出横Gとするとき、該理論検出横Gは、予め傾斜角度に応じて測定し得られた横G値であって、
前記車体の傾斜角度は、前記傾斜角速度(Ψ)の時間積分で得られた車体の傾斜角度(Φ)から該傾斜角度での理論検出横G(Gkihan)をテーブルによる演算、又は数式による演算に基づき導出されたものであり、続いて、
該傾斜角度(Φ)における、前記導出された補正後の横G(Ghosei)と前記導出された理論検出横G(Gkihan)との偏差演算をした偏差横G(Ghensa)の信号演算が少なくとも付加され、
前記補正後の横G(Ghosei)または前記偏差横G(Ghensa)に基づき、前記目標制動力が評価され前記車輪で制動がされること、を特徴とする請求項1または請求項2に記載のブレーキ制御装置。 - 前記車両のECUにおいて、
前記信号演算として、加速度センサーのロールによる影響を取り除く演算を行った補正後の横G(Ghosei)の導出方法として、前記検出された横加速度(Gken)から加速度センサーの車両取り付け高さ(hsen)と前記検出された傾斜角速度(Ψ)の積、との差分を求めること、の導出方法を有する事、を特徴とする請求項1または請求項3に記載のブレーキ制御装置。 - 前記車両のECUにおいて、
車体の傾斜角度と、その傾斜角での前記理論検出横Gの関係の導出方法で、
車体が直進走行時に定義される車体中心線と、重力方向を示す鉛直線と、車体の荷重が係るタイヤ路面接地点(b)及び路面接地点(a)と、該路面接地点(b)から車体中心線上にあり加速度センサーの取り付け高さを隔てた点(Phsen)と、を定め、
路面接地点(b)は、タイヤ幅の中心に位置する固定点であり、
路面接地点(a)は、傾斜走行時に移動する移動点であり、
その全てが車体中心線上に重なる配置関係にある車両が、
傾斜走行に伴い前記定義される配置の移動が生じ、該配置の移動から定まる車体中心線と鉛直線との成す角度を車体の理論傾斜角度(Φ)とし、
移動したタイヤ路面接地点(a)と車体中心線上にある前記加速度センサーの高さを示す点(Phsen)と前記タイヤ路面接地点(b)で成す角度を車体の傾斜戻り角(ρ)とするとき、
傾斜走行時に発生する前記理論検出Gを、前記定義された車体の理論傾斜角度(Φ)と傾斜戻り角(ρ)から、該傾斜戻り角を考慮し得られた横G値に基づき導出する方法を有すること、を特徴とする請求項1または請求項3に記載のブレーキ制御装置。 - 前記制動装置は、
前記ECUからの制動指令により、車輪への制動を行うことができ、該制動はエンジンブレーキとブレーキディスクへの加圧減圧の手段のいずれかまたはその組み合わせによりロール方向の挙動抑制が図られること、を特徴とする請求項1から請求項5のいずれかに記載のブレーキ制御装置。 - 所謂自動二輪車であり少なくても2つの車輪を有する車両の車両解析に用いられる装置であって、該車両解析装置は、前記車両の車両挙動から得られた信号演算を行う装置であり、前記車両の車両挙動から得られる検出信号として、進行方向に対して左右横方向の加速度を検出する横加速度と、左右ロール方向の状態を検出する傾斜角速度(A)または傾斜角度のどちらか一方もしくは両方と、加速度センサーの車両取り付け高さと、が少なくとも入力されており、
信号演算として、前記傾斜角速度(A)または、前記傾斜角度の時間微分で得られる傾斜角速度(B)のいずれかの傾斜角速度を少なくとも用い、
前記横加速度の補正演算として、加速度センサーのロールによる影響を取り除く演算を行った補正後の横G(Ghosei)の導出方法として、
前記横加速度から前記加速度センサーの車両取り付け高さと前記傾斜角速度(A)または傾斜角速度(B)のいずれかの積、との差分を求め、
該導出された補正後の横G(Ghosei)に基づき車両解析がされること、を特徴とする挙動解析装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008173908A JP4960929B2 (ja) | 2008-07-02 | 2008-07-02 | 自動二輪車のブレーキ制御装置及び挙動解析装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008173908A JP4960929B2 (ja) | 2008-07-02 | 2008-07-02 | 自動二輪車のブレーキ制御装置及び挙動解析装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010012903A JP2010012903A (ja) | 2010-01-21 |
| JP2010012903A5 JP2010012903A5 (ja) | 2011-08-04 |
| JP4960929B2 true JP4960929B2 (ja) | 2012-06-27 |
Family
ID=41699443
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008173908A Active JP4960929B2 (ja) | 2008-07-02 | 2008-07-02 | 自動二輪車のブレーキ制御装置及び挙動解析装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4960929B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017168692A1 (ja) * | 2016-03-31 | 2017-10-05 | 本田技研工業株式会社 | 自動二輪車のブレーキ制御装置 |
Families Citing this family (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5643142B2 (ja) * | 2010-03-31 | 2014-12-17 | 株式会社デンソーアイティーラボラトリ | 運転能力判定装置及び運転能力判定方法 |
| DE102010003951A1 (de) * | 2010-04-14 | 2011-10-20 | Robert Bosch Gmbh | Verfahren zum Stabilisieren eines Zweirads bei seitlich rutschendem Hinterrad |
| EP2641819B1 (en) * | 2010-11-19 | 2016-05-18 | Yamaha Hatsudoki Kabushiki Kaisha | Automatic two-wheeled vehicle and control device therefor |
| EP2657094B1 (en) * | 2010-12-20 | 2018-06-27 | Bosch Corporation | Brake system and brake control method |
| JP5697183B2 (ja) * | 2012-01-31 | 2015-04-08 | ヤマハ発動機株式会社 | ブレーキ装置及び鞍乗型車両 |
| DE102012203462A1 (de) * | 2012-03-05 | 2013-09-05 | Fsd Fahrzeugsystemdaten Gmbh | Verfahren und Anordnung zur Erfassung von Daten für eine Sicherheitsvorrichtung für ein Balancefahrzeug |
| JP5905955B2 (ja) * | 2012-03-30 | 2016-04-20 | ヤマハ発動機株式会社 | ブレーキ装置及び鞍乗型車両 |
| JP5720901B2 (ja) * | 2012-05-28 | 2015-05-20 | 国産電機株式会社 | 車両用トラクション制御装置 |
| DE102012213688A1 (de) | 2012-08-02 | 2014-02-06 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bestimmung einer Querneigung einer von einem Zweiradfahrzeug befahrenen Fahrbahnoberfläche |
| JP2014069696A (ja) * | 2012-09-28 | 2014-04-21 | Honda Motor Co Ltd | 自動二輪車 |
| JP6018878B2 (ja) * | 2012-10-25 | 2016-11-02 | 株式会社ブリヂストン | 安定性評価システム、および安定性評価方法 |
| DE102012220355B4 (de) * | 2012-11-08 | 2021-08-12 | Robert Bosch Gmbh | Verfahren zur Unfallfolgenminderung in einem Zweirad |
| DE102012222884A1 (de) * | 2012-12-12 | 2014-06-12 | Robert Bosch Gmbh | Verfahren zur Stabilisierung eines Zweirads |
| DE102013212606A1 (de) * | 2013-06-28 | 2014-12-31 | Robert Bosch Gmbh | Verfahren zur querdynamischen Stabilisierung eines einspurigen Kraftfahrzeugs |
| JP6194199B2 (ja) * | 2013-07-04 | 2017-09-06 | 日信工業株式会社 | バーハンドル車両用ブレーキ液圧制御装置 |
| WO2015133397A1 (ja) * | 2014-03-03 | 2015-09-11 | ボッシュ株式会社 | 二輪車用ブレーキ装置の制動力制御方法及び制動力制御装置 |
| JP5829307B2 (ja) * | 2014-05-13 | 2015-12-09 | ヤマハ発動機株式会社 | 安定制御システム、安定制御システムを備えた鞍乗り型車両、方法およびコンピュータプログラム |
| JP6502782B2 (ja) * | 2015-07-31 | 2019-04-17 | Kyb株式会社 | バンク角度検知装置およびバンク角度検知方法 |
| DE102015220901A1 (de) | 2015-10-27 | 2017-04-27 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur fahrerunabhängigen Beeinflussung eines Lenkungselementes eines einspurigen Kraftfahrzeugs |
| DE112015006908T5 (de) * | 2015-12-11 | 2018-05-24 | Robert Bosch Gmbh | Fahrzeugbewegungsdetektionseinrichtung |
| EP3423327B1 (en) | 2016-03-04 | 2022-05-11 | Continental Teves AG & Co. OHG | Method to determine the roll angle of a motorcycle |
| JP2018058476A (ja) | 2016-10-05 | 2018-04-12 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | モータサイクル用ブレーキシステムの制御装置、モータサイクル用ブレーキシステム、及び、モータサイクル用ブレーキシステムの制御方法 |
| JP2018134991A (ja) * | 2017-02-22 | 2018-08-30 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 制御装置、制御方法及びブレーキシステム |
| JP2018134990A (ja) * | 2017-02-22 | 2018-08-30 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 制御装置、制御方法及びブレーキシステム |
| WO2018179345A1 (ja) * | 2017-03-31 | 2018-10-04 | 本田技研工業株式会社 | 追従車両 |
| JP2018176831A (ja) * | 2017-04-05 | 2018-11-15 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 制御装置、制御方法及びブレーキシステム |
| JP2019026166A (ja) * | 2017-08-02 | 2019-02-21 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 制御装置、車体挙動制御システム、モータサイクル、及び、制御方法 |
| JP7058481B2 (ja) * | 2017-08-23 | 2022-04-22 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 挙動制御装置及び挙動制御方法 |
| JP7109142B2 (ja) * | 2018-05-18 | 2022-07-29 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 鞍乗型車両用情報処理装置、及び、鞍乗型車両用情報処理方法 |
| JP2020029176A (ja) | 2018-08-23 | 2020-02-27 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 制御装置及び制御方法 |
| CN109131262B (zh) * | 2018-09-29 | 2025-07-25 | 扬州奥创机械科技有限公司 | 一种故障轮胎自救器 |
| JP2020093558A (ja) * | 2018-12-10 | 2020-06-18 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 制御装置及び制御方法 |
| JP7143510B2 (ja) * | 2019-03-29 | 2022-09-28 | 本田技研工業株式会社 | 鞍乗り型車両の運転支援装置 |
| JP7123241B2 (ja) * | 2019-03-29 | 2022-08-22 | 本田技研工業株式会社 | 鞍乗り型車両の運転支援装置 |
| JP7439413B2 (ja) * | 2019-08-26 | 2024-02-28 | スズキ株式会社 | 自動ブレーキ装置 |
| DE112020004697T5 (de) * | 2019-09-30 | 2022-06-23 | Honda Motor Co., Ltd. | Lenkassistenzvorrichtung für ein sattelaufsitzfahrzeug |
| DE112020004670T5 (de) * | 2019-09-30 | 2022-06-15 | Honda Motor Co., Ltd. | Lenkassistenzvorrichtung für ein Fahrzeug vom Aufsitztyp |
| CN114450218B (zh) * | 2019-09-30 | 2023-05-12 | 本田技研工业株式会社 | 骑乘型车辆的车辆信息报告装置 |
| JP7220811B2 (ja) * | 2019-12-25 | 2023-02-10 | ナブテスコ株式会社 | 電動制動機構付き車両、車輪ユニット、及び車輪ユニットの制御用プログラム |
| JP6964151B2 (ja) * | 2020-01-16 | 2021-11-10 | 本田技研工業株式会社 | 自動二輪車 |
| JP7318541B2 (ja) * | 2020-01-17 | 2023-08-01 | 株式会社アドヴィックス | 制動制御装置 |
| JP2021160446A (ja) * | 2020-03-31 | 2021-10-11 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 制御装置及び制御方法 |
| JP2021160445A (ja) * | 2020-03-31 | 2021-10-11 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 制御装置及び制御方法 |
| WO2023119423A1 (ja) * | 2021-12-21 | 2023-06-29 | ヤマハ発動機株式会社 | 傾斜車両 |
| JP7427702B2 (ja) * | 2022-03-31 | 2024-02-05 | 本田技研工業株式会社 | 報知装置 |
| WO2025178576A1 (en) * | 2024-02-19 | 2025-08-28 | Gmf Motor A.Ş. | A braking system and mehod for two-wheeled vehicles |
| CN119975623B (zh) * | 2025-04-15 | 2025-07-08 | 深圳市麦米电气软件技术有限公司 | 车辆转弯半径检测方法、车辆控制方法、设备及存储介质 |
| CN121361346A (zh) * | 2025-12-19 | 2026-01-20 | 台铃科技股份有限公司 | 两轮电动车的控制方法和系统 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4244112C2 (de) * | 1992-12-24 | 2000-10-12 | Bayerische Motoren Werke Ag | Antiblockierregelsystem für Motorräder |
| JP3982011B2 (ja) * | 1997-06-24 | 2007-09-26 | 三菱ふそうトラック・バス株式会社 | 車両の横転防止装置 |
| JP3695164B2 (ja) * | 1998-08-03 | 2005-09-14 | トヨタ自動車株式会社 | 車輌の挙動制御方法 |
| JP3608440B2 (ja) * | 1999-07-06 | 2005-01-12 | トヨタ自動車株式会社 | 車輌の減衰係数制御装置 |
| JP3546830B2 (ja) * | 2000-10-05 | 2004-07-28 | トヨタ自動車株式会社 | 車輌のロール挙動制御装置 |
| JP2002166826A (ja) * | 2000-11-29 | 2002-06-11 | Nissan Diesel Motor Co Ltd | 車両のロールオーバ防止装置 |
| JP4277641B2 (ja) * | 2003-09-30 | 2009-06-10 | 三菱ふそうトラック・バス株式会社 | 車両のロールオーバ抑制制御装置 |
| DE102006061483B4 (de) * | 2006-02-22 | 2024-01-25 | Continental Automotive Technologies GmbH | Verfahren und Vorrichtung zur Bestimmung des Rollwinkels eines Kraftrades |
| JP5026036B2 (ja) * | 2006-09-21 | 2012-09-12 | 富士重工業株式会社 | 車両のロールオーバ制御装置 |
-
2008
- 2008-07-02 JP JP2008173908A patent/JP4960929B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017168692A1 (ja) * | 2016-03-31 | 2017-10-05 | 本田技研工業株式会社 | 自動二輪車のブレーキ制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010012903A (ja) | 2010-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4960929B2 (ja) | 自動二輪車のブレーキ制御装置及び挙動解析装置 | |
| US11046305B2 (en) | Leaning posture control device for leaning vehicle having left and right inclined wheels mounted thereon and leaning vehicle having left and right inclined wheels mounted thereon | |
| JP5462373B2 (ja) | 車両の運動制御装置 | |
| JP6817418B2 (ja) | 制御装置、制御方法及びブレーキシステム | |
| TW201809940A (zh) | 穩定摩托車的系統與方法 | |
| JP2013523532A (ja) | 後輪が側方に滑った場合に二輪車を安定化するための方法 | |
| WO2011040115A1 (ja) | 車両の運動制御装置 | |
| KR20210037785A (ko) | 차량의 승차감 개선 장치 및 방법 | |
| JP2020029176A (ja) | 制御装置及び制御方法 | |
| CN107848509A (zh) | 用于在路面上积水打滑时辅助驾驶员的方法 | |
| US7058492B1 (en) | Rolling motion stability control apparatus for a vehicle | |
| Kidane et al. | Development and experimental evaluation of a tilt stability control system for narrow commuter vehicles | |
| JP2006501094A (ja) | 操舵トルクを決定する方法 | |
| JP2006501094A5 (ja) | ||
| US20230373449A1 (en) | Controller and control method | |
| JP2012210935A (ja) | 加加速度情報を用いた車両の運動制御装置および方法 | |
| WO2020121111A1 (ja) | 制御装置及び制御方法 | |
| CN101113932A (zh) | 具有设置在转向器中的扭矩传感器的动态行驶调节器 | |
| Araki et al. | Study of riding assist control enabling self-standing in stationary state | |
| JP4990384B2 (ja) | 加加速度情報を用いた車両の運動制御方法 | |
| JP2007503358A (ja) | チルト調節装置及び車両のチルトを調節する方法 | |
| JP2006096230A (ja) | 車両運動制御装置および車両運動制御方法 | |
| JP6395789B2 (ja) | 車両制御装置 | |
| Maier et al. | Conditions for nose-over and front wheel lockup of electric bicycles | |
| JP6599110B2 (ja) | 車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110622 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110622 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20110622 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20110706 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111018 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120313 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120323 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20180330 Year of fee payment: 6 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4960929 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |