JP4928969B2 - 内視鏡の湾曲保持機構 - Google Patents
内視鏡の湾曲保持機構 Download PDFInfo
- Publication number
- JP4928969B2 JP4928969B2 JP2007028708A JP2007028708A JP4928969B2 JP 4928969 B2 JP4928969 B2 JP 4928969B2 JP 2007028708 A JP2007028708 A JP 2007028708A JP 2007028708 A JP2007028708 A JP 2007028708A JP 4928969 B2 JP4928969 B2 JP 4928969B2
- Authority
- JP
- Japan
- Prior art keywords
- bending
- leaf spring
- pressure contact
- metal disk
- endoscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0052—Constructional details of control elements, e.g. handles
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Description
図2は内視鏡の全体構成を示しており、可撓性の挿入部1の先端付近には遠隔操作により屈曲する湾曲部2が形成され、図示されていない観察窓等が配置された先端部本体3が湾曲部2の先端に連結されている。
2 湾曲部
4 操作部
5UD 上下方向用湾曲操作ノブ(湾曲操作機構)
6U 上方向用操作ワイヤ
6D 下方向用操作ワイヤ
7UD 上下方向用湾曲保持操作ノブ(湾曲保持操作手段)
9UD 上下方向用駆動プーリ(湾曲操作機構)
12 上下方向用回転駆動筒(湾曲操作機構)
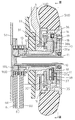
30〜38 湾曲保持機構
30 不動台座
32 雄ネジ環
35 雌ネジ環
37 金属円盤(摩擦抵抗発生部材)
37a 圧接面
38 放射状板バネ(摩擦抵抗発生部材)
38a 環状部
38b 放射状突出爪
Claims (9)
- 湾曲部を遠隔操作により屈曲させるために操作部に回転自在に配置された湾曲操作機構を任意の回転位置で静止させるように、上記湾曲操作機構の回転動作に摩擦抵抗を付与することができるようにした内視鏡の湾曲保持機構において、
上記湾曲操作機構の回転動作に摩擦抵抗を付与するために相対的に回転動作をする摩擦抵抗発生部材が、環状部の周囲にそれと一体に複数の放射状突出爪が形成されたバネ性のある金属板材からなる放射状板バネと、上記放射状板バネの板面に対して斜め向きに圧接される圧接面を有する金属円盤とで構成されていることを特徴とする内視鏡の湾曲保持機構。 - 上記放射状板バネが上記湾曲操作機構と共に軸線周りに回転し、上記金属円盤は回転できない状態で上記操作部の固定部材に係合している請求項1記載の内視鏡の湾曲保持機構。
- 上記放射状板バネと上記金属円盤とが圧接する状態と分離する状態とを切り換え操作することができる湾曲保持操作手段が設けられている請求項1又は2記載の内視鏡の湾曲保持機構。
- 上記湾曲保持操作手段により、上記放射状突出爪と上記金属円盤との圧接量を可変することができる請求項3記載の内視鏡の湾曲保持機構。
- 上記湾曲保持操作手段により上記放射状板バネと上記金属円盤との圧接量が次第に大きくされるのに伴って上記放射状突出爪が弾性変形して、上記放射状板バネと上記金属円盤との圧接位置が上記放射状突出爪の最外周部分から次第に内周寄りの部分を含む状態に変化する請求項4記載の内視鏡の湾曲保持機構。
- 上記放射状板バネが全体として平面状に形成されていて、上記金属円盤側の圧接面が傘状の斜面に形成されている請求項1ないし5のいずれかの項に記載の内視鏡の湾曲保持機構。
- 上記放射状板バネが全体として傘状に形成されていて、上記金属円盤側の圧接面が平面状に形成されている請求項1ないし5のいずれかの項に記載の内視鏡の湾曲保持機構。
- 上記放射状板バネに形成された放射状突出爪の少なくとも上記金属円盤が圧接される稜線部分がアール面取りされている請求項1ないし7のいずれかの項に記載の内視鏡の湾曲保持機構。
- 上記湾曲保持機構が、上記湾曲操作機構の湾曲操作ノブ内の空間に配置されている請求項1ないし8のいずれかの項に記載の内視鏡の湾曲保持機構。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007028708A JP4928969B2 (ja) | 2006-04-26 | 2007-02-08 | 内視鏡の湾曲保持機構 |
| US11/737,305 US7828725B2 (en) | 2006-04-26 | 2007-04-19 | Bent state holding mechanism of an endoscope |
| DE102007019781.2A DE102007019781B4 (de) | 2006-04-26 | 2007-04-26 | Biegezustands-Haltemechanismus eines Endoskops |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006121597 | 2006-04-26 | ||
| JP2006121597 | 2006-04-26 | ||
| JP2007028708A JP4928969B2 (ja) | 2006-04-26 | 2007-02-08 | 内視鏡の湾曲保持機構 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007313292A JP2007313292A (ja) | 2007-12-06 |
| JP2007313292A5 JP2007313292A5 (ja) | 2009-04-02 |
| JP4928969B2 true JP4928969B2 (ja) | 2012-05-09 |
Family
ID=38622441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007028708A Active JP4928969B2 (ja) | 2006-04-26 | 2007-02-08 | 内視鏡の湾曲保持機構 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7828725B2 (ja) |
| JP (1) | JP4928969B2 (ja) |
| DE (1) | DE102007019781B4 (ja) |
Families Citing this family (66)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5297003B2 (ja) * | 2007-06-06 | 2013-09-25 | 富士フイルム株式会社 | 内視鏡 |
| JP5159181B2 (ja) | 2007-06-21 | 2013-03-06 | Hoya株式会社 | 内視鏡における連結部の構造 |
| JP5006708B2 (ja) | 2007-06-22 | 2012-08-22 | Hoya株式会社 | 内視鏡の回転機構の端部構造 |
| JP5137477B2 (ja) | 2007-06-22 | 2013-02-06 | Hoya株式会社 | 内視鏡における連結部の構造 |
| JP5186223B2 (ja) * | 2008-01-25 | 2013-04-17 | Hoya株式会社 | 内視鏡の湾曲操作装置 |
| RU2517603C2 (ru) | 2008-12-10 | 2014-05-27 | Амбу А/С | Механизм управления изгибающимся участком эндоскопа |
| JP5331507B2 (ja) * | 2009-02-18 | 2013-10-30 | 富士フイルム株式会社 | 内視鏡 |
| US10130246B2 (en) | 2009-06-18 | 2018-11-20 | Endochoice, Inc. | Systems and methods for regulating temperature and illumination intensity at the distal tip of an endoscope |
| US10524645B2 (en) | 2009-06-18 | 2020-01-07 | Endochoice, Inc. | Method and system for eliminating image motion blur in a multiple viewing elements endoscope |
| US9474440B2 (en) | 2009-06-18 | 2016-10-25 | Endochoice, Inc. | Endoscope tip position visual indicator and heat management system |
| JP5430299B2 (ja) * | 2009-09-03 | 2014-02-26 | Hoya株式会社 | 回転操作部の回転位置保持機構 |
| JP5393383B2 (ja) | 2009-09-30 | 2014-01-22 | Hoya株式会社 | 内視鏡の処置具起上操作装置 |
| US8974372B2 (en) | 2010-08-25 | 2015-03-10 | Barry M. Fell | Path-following robot |
| US9545253B2 (en) | 2010-09-24 | 2017-01-17 | Ethicon Endo-Surgery, Llc | Surgical instrument with contained dual helix actuator assembly |
| US9220559B2 (en) | 2010-09-24 | 2015-12-29 | Ethicon Endo-Surgery, Inc. | Articulation joint features for articulating surgical device |
| US9089327B2 (en) | 2010-09-24 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Surgical instrument with multi-phase trigger bias |
| US20120078244A1 (en) | 2010-09-24 | 2012-03-29 | Worrell Barry C | Control features for articulating surgical device |
| US10663714B2 (en) | 2010-10-28 | 2020-05-26 | Endochoice, Inc. | Optical system for an endoscope |
| US9706908B2 (en) | 2010-10-28 | 2017-07-18 | Endochoice, Inc. | Image capture and video processing systems and methods for multiple viewing element endoscopes |
| KR20120055916A (ko) * | 2010-11-24 | 2012-06-01 | 삼성전자주식회사 | 내시경 |
| US10517464B2 (en) | 2011-02-07 | 2019-12-31 | Endochoice, Inc. | Multi-element cover for a multi-camera endoscope |
| DE102013101202A1 (de) * | 2013-02-07 | 2014-08-07 | Karl Storz Gmbh & Co. Kg | Endoskopisches Instrument |
| US10058310B2 (en) | 2013-03-13 | 2018-08-28 | Ethicon Llc | Electrosurgical device with drum-driven articulation |
| US9636003B2 (en) | 2013-06-28 | 2017-05-02 | Endochoice, Inc. | Multi-jet distributor for an endoscope |
| US12207796B2 (en) | 2013-03-28 | 2025-01-28 | Endochoice Inc. | Multi-jet controller for an endoscope |
| US10595714B2 (en) | 2013-03-28 | 2020-03-24 | Endochoice, Inc. | Multi-jet controller for an endoscope |
| US9667935B2 (en) | 2013-05-07 | 2017-05-30 | Endochoice, Inc. | White balance enclosure for use with a multi-viewing elements endoscope |
| CN105377106A (zh) * | 2013-05-17 | 2016-03-02 | 恩多巧爱思股份有限公司 | 具有制动系统的内窥镜控制单元 |
| US9949623B2 (en) | 2013-05-17 | 2018-04-24 | Endochoice, Inc. | Endoscope control unit with braking system |
| JP5604561B2 (ja) * | 2013-05-21 | 2014-10-08 | 哲丸 宮脇 | 内視鏡 |
| US10064541B2 (en) | 2013-08-12 | 2018-09-04 | Endochoice, Inc. | Endoscope connector cover detection and warning system |
| US9943218B2 (en) | 2013-10-01 | 2018-04-17 | Endochoice, Inc. | Endoscope having a supply cable attached thereto |
| US9968242B2 (en) | 2013-12-18 | 2018-05-15 | Endochoice, Inc. | Suction control unit for an endoscope having two working channels |
| WO2015112747A2 (en) | 2014-01-22 | 2015-07-30 | Endochoice, Inc. | Image capture and video processing systems and methods for multiple viewing element endoscopes |
| US11234581B2 (en) | 2014-05-02 | 2022-02-01 | Endochoice, Inc. | Elevator for directing medical tool |
| WO2016014581A1 (en) | 2014-07-21 | 2016-01-28 | Endochoice, Inc. | Multi-focal, multi-camera endoscope systems |
| JP6665164B2 (ja) | 2014-08-29 | 2020-03-13 | エンドチョイス インコーポレイテッドEndochoice, Inc. | 内視鏡アセンブリ |
| WO2016075992A1 (ja) * | 2014-11-12 | 2016-05-19 | オリンパス株式会社 | ダイヤルユニットおよび導入装置 |
| EP3235241B1 (en) | 2014-12-18 | 2023-09-06 | EndoChoice, Inc. | System for processing video images generated by a multiple viewing elements endoscope |
| EP3242584B1 (en) | 2015-01-05 | 2020-07-22 | EndoChoice, Inc. | Tubed manifold of a multiple viewing elements endoscope |
| US10376181B2 (en) | 2015-02-17 | 2019-08-13 | Endochoice, Inc. | System for detecting the location of an endoscopic device during a medical procedure |
| US12529882B2 (en) | 2015-02-24 | 2026-01-20 | Endochoice, Inc. | Optical system for an endoscope |
| US10078207B2 (en) | 2015-03-18 | 2018-09-18 | Endochoice, Inc. | Systems and methods for image magnification using relative movement between an image sensor and a lens assembly |
| US10401611B2 (en) | 2015-04-27 | 2019-09-03 | Endochoice, Inc. | Endoscope with integrated measurement of distance to objects of interest |
| ES2818174T3 (es) | 2015-05-17 | 2021-04-09 | Endochoice Inc | Mejora de imagen endoscópica usando ecualización de histograma adaptativo limitado por contraste (CLAHE) implementada en un procesador |
| EP4166061A1 (en) | 2015-09-17 | 2023-04-19 | EndoMaster Pte. Ltd. | Improved flexible robotic endoscopy system |
| US20170119474A1 (en) | 2015-10-28 | 2017-05-04 | Endochoice, Inc. | Device and Method for Tracking the Position of an Endoscope within a Patient's Body |
| EP3383244B1 (en) | 2015-11-24 | 2025-06-18 | Endochoice, Inc. | Disposable air/water and suction valves for an endoscope |
| JP2019507628A (ja) | 2016-02-24 | 2019-03-22 | エンドチョイス インコーポレイテッドEndochoice, Inc. | Cmosセンサを用いた複数ビュー要素内視鏡のための回路基板アセンブリ |
| US10292570B2 (en) | 2016-03-14 | 2019-05-21 | Endochoice, Inc. | System and method for guiding and tracking a region of interest using an endoscope |
| US10993605B2 (en) | 2016-06-21 | 2021-05-04 | Endochoice, Inc. | Endoscope system with multiple connection interfaces to interface with different video data signal sources |
| DE102016121056A1 (de) * | 2016-11-04 | 2018-05-09 | Digital Endoscopy Gmbh | Arbeitskanalelement, endoskop mit einem arbeitskanalelement, und verfahren zur anwendung eines arbeitskanals in einem endoskop |
| JP3215550U (ja) * | 2017-01-25 | 2018-03-29 | 珠海嘉潤医用影像科技有限公司Zhuhai Kaden Medical Imaging Technology Co., Ltd | 気管支鏡の引張コードのための制御機構 |
| EP3513706B1 (en) | 2018-01-19 | 2024-10-16 | Ambu A/S | A method for fixation of a wire portion of an endoscope, and an endoscope |
| EP3517017B1 (en) | 2018-01-26 | 2023-01-18 | Ambu A/S | A method for fixation of a wire portion of an endoscope, and an endoscope |
| US11259688B2 (en) * | 2018-04-18 | 2022-03-01 | Duke University | Devices for assisting manipulation of input mechanisms of medical instruments |
| DE102018130553A1 (de) * | 2018-11-30 | 2020-06-04 | Henke-Sass, Wolf Gmbh | Endoskop |
| EP4138629A1 (en) | 2020-04-24 | 2023-03-01 | Ambu A/S | A braking mechanism for a rotary operating member of a medical device |
| DE102020111885A1 (de) | 2020-04-30 | 2021-11-04 | Ambu A/S | Lenkanordnung für ein Endoskop, insbesondere für ein Einwegendoskop |
| DE102020118043A1 (de) | 2020-07-08 | 2022-01-13 | Karl Storz Se & Co. Kg | Ablenksteuerungsmechanismus für ein lenkbares flexibles Endoskop, lenkbares flexibles Endoskop und Verfahren zur Steuerung eines flexiblen Endoskops |
| CN112112913B (zh) * | 2020-09-25 | 2025-03-18 | 珠海视新医用科技股份有限公司 | 一种角度锁紧装置及内窥镜 |
| GB2636953B (en) * | 2021-01-26 | 2026-01-21 | Versitech Ltd | Coupling joints on tubular spiralling loops of a steerable arm for an endoscope instrument channel |
| WO2023285520A1 (en) | 2021-07-14 | 2023-01-19 | Karl Storz Se & Co. Kg | Deflection control mechanism for a steerable flexible endoscope, steerable flexible endoscope, and method for controlling a flexible endoscope |
| WO2023191068A1 (ja) * | 2022-03-31 | 2023-10-05 | 日本ゼオン株式会社 | 医療用デバイス |
| CN114947700B (zh) * | 2022-05-23 | 2026-02-06 | 苏州欧谱曼迪科技有限公司 | 内窥镜弯曲状态锁定机构及其内窥镜 |
| CN119950123A (zh) * | 2025-02-19 | 2025-05-09 | 应脉医疗科技(上海)有限公司 | 阻尼组件及输送装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58157433A (ja) * | 1982-03-15 | 1983-09-19 | オリンパス光学工業株式会社 | 湾曲部を有する挿入部の湾曲機構 |
| US5329887A (en) * | 1992-04-03 | 1994-07-19 | Vision Sciences, Incorporated | Endoscope control assembly with removable control knob/brake assembly |
| JP3368649B2 (ja) * | 1993-12-28 | 2003-01-20 | オリンパス光学工業株式会社 | 内視鏡湾曲操作装置 |
| US5507717A (en) * | 1993-05-24 | 1996-04-16 | Olympus Optical Co., Ltd. | Device for bending the insertion section of an endoscope |
| US5496260A (en) * | 1994-05-16 | 1996-03-05 | Welch Allyn, Inc. | Torque override knob for endoscopes, borescopes, or guide tubes |
| JP3866786B2 (ja) * | 1995-10-06 | 2007-01-10 | オリンパス株式会社 | 内視鏡 |
| JP3762515B2 (ja) | 1997-04-14 | 2006-04-05 | オリンパス株式会社 | 内視鏡の湾曲操作装置 |
| JP4362664B2 (ja) * | 1999-02-10 | 2009-11-11 | フジノン株式会社 | 内視鏡のアングル操作装置 |
| US6673012B2 (en) * | 2000-04-19 | 2004-01-06 | Pentax Corporation | Control device for an endoscope |
| JP4323300B2 (ja) | 2003-12-03 | 2009-09-02 | オリンパス株式会社 | 内視鏡 |
| US20060252993A1 (en) | 2005-03-23 | 2006-11-09 | Freed David I | Medical devices and systems |
-
2007
- 2007-02-08 JP JP2007028708A patent/JP4928969B2/ja active Active
- 2007-04-19 US US11/737,305 patent/US7828725B2/en active Active
- 2007-04-26 DE DE102007019781.2A patent/DE102007019781B4/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE102007019781B4 (de) | 2022-02-24 |
| US20070255104A1 (en) | 2007-11-01 |
| DE102007019781A1 (de) | 2007-11-29 |
| US7828725B2 (en) | 2010-11-09 |
| JP2007313292A (ja) | 2007-12-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4928969B2 (ja) | 内視鏡の湾曲保持機構 | |
| JP4827598B2 (ja) | 内視鏡の湾曲保持機構 | |
| JP4847783B2 (ja) | 内視鏡の湾曲操作装置 | |
| US9089263B2 (en) | Endoscope and instrument lifting operation device for the same | |
| JP2007313292A5 (ja) | ||
| JP2004204983A (ja) | ヒンジ装置 | |
| WO2015119000A1 (ja) | ステアリング装置 | |
| JP5717933B2 (ja) | ヒンジ機構およびパネル装置 | |
| JP2018528833A (ja) | ブレーキシステム | |
| JP4836674B2 (ja) | 内視鏡の湾曲操作機構 | |
| CN101922520B (zh) | 操作手柄的转矩释放机构 | |
| JPWO2020021934A1 (ja) | 密封装置 | |
| JP2011112072A (ja) | 動力伝達装置 | |
| JP2016151355A (ja) | チルトヒンジ及び電子機器 | |
| JP4643721B2 (ja) | 内視鏡のアングル操作装置 | |
| JP2012211629A (ja) | チルトヒンジ並びにこのチルトヒンジを備えた電子機器 | |
| JP2000229061A (ja) | 内視鏡のアングル操作装置 | |
| JP2005054971A (ja) | ヒンジ装置 | |
| JP5507008B2 (ja) | ヒンジ機構および車載用ディスプレイ装置 | |
| JP7258052B2 (ja) | 伝動装置 | |
| JP2008083557A (ja) | レンズ鏡胴 | |
| JP6918426B2 (ja) | トルク伝達装置 | |
| JP4163090B2 (ja) | 車両用サンバイザの支軸装着用留具 | |
| JP4737626B2 (ja) | 回転体機構 | |
| CN104838154B (zh) | 铰链机构及面板装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20080502 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090217 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120125 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120213 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150217 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4928969 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |