JP4831442B2 - 衝突判定装置 - Google Patents
衝突判定装置 Download PDFInfo
- Publication number
- JP4831442B2 JP4831442B2 JP2010543643A JP2010543643A JP4831442B2 JP 4831442 B2 JP4831442 B2 JP 4831442B2 JP 2010543643 A JP2010543643 A JP 2010543643A JP 2010543643 A JP2010543643 A JP 2010543643A JP 4831442 B2 JP4831442 B2 JP 4831442B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- collision
- curvature radius
- collision determination
- condition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
11 曲率半径算出部(曲率半径算出手段)
12 物体検出部(物体検出手段)
13 軌道推定部(軌道推定手段)
14 進行方向判定部(進行方向判定手段)
15 条件変更部(条件変更手段)
16 可能性判定部(可能性判定手段)
2 入力機器
21 車速センサ
22 ヨーレートセンサ
23(23R、23L) レーダセンサ
(曲率半径R1)=(車速V)/(ヨーレートα) (1)
すなわち、曲率半径算出部11は、車速Vをヨーレートαで除することによって曲率半径R1を求める。
仮想車長VL=基準車長L20×R1/R1S (2)
ここで、基準車長L20は、予め設定された標準的な仮想車長(例えば、4m)である。
仮想車長VL=基準車長L20×R2/R2S (3)
ここで、基準車長L20は、予め設定された標準的な仮想車長(例えば、4m)である。
仮想車長VL=基準車長L20×R1/R1S (4)
仮想車長VL=基準車長L20×R2/R2S (5)
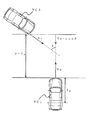
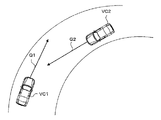
前方車両VC2が自車両VC1に対して斜め方向から接近している場合の衝突までの時間TTCは、以下の式(6)に基づいて求めることができる。
TTC=(y−lF)/(Vn・cosδ+V0) (6)
ここで、各文字が表す意味は以下の通りである。
y:自車両VC1の後輪軸中心を原点としたときの前方車両VC2の捕捉点のY座標(自車両VC1の前後方向をY軸、自車両VC1の左右方向をX軸とする)、lF:自車両VC1の後輪軸中心から先端部中心までの長さ、Vn:前方車両VC2の速度、δ:前方車両VC2の進行方向と自車両VC1の進行方向がなす角度、V0:自車両VC1の速度
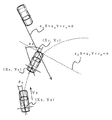
自車両VC1の予想偏向角θFおよび予想自車位置(XF,YF)は、以下の式(7)、(8)、(9)から求めることができる。
θF=θ0+V0・TTC/(−R) (7)
XF=X0+V0・TTC・sin(−θF) (8)
YF=Y0+V0・TTC・cos(−θF) (9)
ここで、各文字が表す意味は以下の通りである。
θ0:自車両VC1の現在位置における偏向角、V0:自車両VC1の速度、R:自車両VC1の進行軌跡の旋回半径、X0:自車両VC1の現在位置のX座標、Y0:自車両VC1の現在位置のY座標
pFX+qFY+rF=0 (10)
pF=1 (11)
qF=cos(−θF)/sin(−θF) (12)
rF=(−lF−XFsin(−θF)−YFcos(−θF))
/sin(−θF) (13)
pF=sin(−θF)/cos(−θF) (14)
qF=1 (15)
rF=(−lF−XFsin(−θF)−YFcos(−θF))
/cos(−θF) (16)
pnX+qnY+rn=0の各係数は、前方車両VC2の過去の捕捉点履歴に基づいて求めることができる。例えば、過去の複数の捕捉点に最小二乗法を適用することで進行方向ベクトルを求め、そのベクトルを延ばした直線を軌道予測線とすることができる。
XC=−qFYC/pF−rF/pF (17)
YC=(pnrF−pFrn)/(pFqn−pnqF) (18)
XC=(qFrn−qnrF)/(pFqn−pnqF) (19)
YC=−pFXC/qF−rF/pF (20)
pFqn−pnqF=0のとき、これらの直線は互いに平行となり、交点が存在しないので、衝突可能性無しと判定される。
cpx=cos(−θF)(XC−XF)
−sin(−θF)(YC−YF) (21)
cpy=0 (22)
式(21)に式(7)(8)(9)(17)(18)(19)(20)で算出した値を代入することで、予想衝突点(cpx,cpy)を算出することができる。
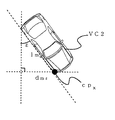
補正後のcpx’は以下の式(23)(24)で表される。
(前方車両VC2が「左斜め前」から接近する場合、図11参照)
cpx’=cpx−dmε・σ・σR (23)
(前方車両VC2が「右斜め前」から接近する場合)
cpx’=cpx+dmε・σ・σR (24)
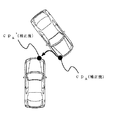
dmε=lm・sinε (25)
ε:自車両VC1の前後方向に対して前方車両VC2の接近方向がなす角度(図12参照)
lm:前方車両VC2の長さ(上述した基準車長に相当する)
(前方車両VC2が「左斜め前」から接近する場合)
σ=cpx/(dR+dmε・σR) (26)
(前方車両VC2が「右斜め前」から接近する場合)
σ=−cpx/(dR+dmε・σR) (27)
ここで、|R|:道路の曲率半径の絶対値(Rは右カーブでは正、左カーブでは負の値で表されるため)、|RTH|:σの補正を行う|R|の上限値(例えば100m)
一方、cpx’が自車両VC1の幅の半分dR以上である場合は、自車両VC1と前方車両VC2は衝突しないと判定される。
(A)本実施形態においては、衝突判定ECU1が、機能的に、曲率半径算出部11、物体検出部12、軌道推定部13、進行方向判定部14、条件変更部15、可能性判定部16等を備える場合について説明したが、曲率半径算出部11、物体検出部12、軌道推定部13、進行方向判定部14、条件変更部15、及び、可能性判定部16の内、少なくとも1つの機能部が、電気回路等のハードウェアによって構成されている形態でも良い。
仮想車長VL=γ×検出車長L200×R1/R1S (6)
ここで、係数γは、前方車両VC2の大きさに基づいて設定される係数であり、検出車長L200は、レーダセンサ23による捕捉点の個数、位置等から推定される前方車両VC2の車長である。
Claims (12)
- 車両に搭載され、他の車両と衝突する可能性の有無を判定する衝突判定装置であって、
前記他の車両と衝突する可能性があるか否かを判定する可能性判定手段と、
自車両及び前記他の車両の少なくとも一方が、カーブ路を走行中であるか否か、を判定する進行方向判定手段と、
前記進行方向判定手段によってカーブ路を走行中であると判定された場合に、前記可能性推定手段において衝突する可能性があると判定する条件である衝突判定条件を厳しくするべく変更する条件変更手段と、を備える衝突判定装置。 - 前記他の車両の代表点が、今後進行する軌跡である進行軌跡を推定する軌跡推定手段、を備え、
前記可能性推定手段は、前記軌跡推定手段によって推定された進行軌跡上を、予め設定された車幅及び車長を有する前記他の車両が移動する場合に、前記他の車両が自車両と交差するか否かに応じて、前記他の車両と衝突する可能性があるか否かを判定する、請求項1に記載の衝突判定装置。 - 前記条件変更手段は、前記他の車両の車幅及び車長の少なくとも一方を小さくすることによって、前記衝突判定条件を厳しくするべく変更する、請求項2に記載の衝突判定装置。
- レーダを介して前記他の車両の位置を検出する物体検出手段、を備え、
前記他の車両の代表点は、前記レーダによって前記他の車両が捕捉された捕捉点である、請求項2に記載の衝突判定装置。 - 自車両の位置する道路の曲率半径を求める曲率半径算出手段、を備え、
前記進行方向判定手段は、前記曲率半径算出手段によって求められた曲率半径に基づいて、自車両がカーブ路を走行中であるか否か、を判定する、請求項1に記載の衝突判定装置。 - 前記進行方向判定手段は、前記曲率半径算出手段によって求められた曲率半径が予め設定された閾値半径以下である場合に、自車両がカーブ路を走行中であると判定する、請求項5に記載の衝突判定装置。
- 前記曲率半径算出手段は、車速をヨーレートで除することによって前記曲率半径を求める、請求項5に記載の衝突判定装置。
- 自車両の位置する道路の曲率半径を求める曲率半径算出手段、を備え、
前記条件変更手段は、前記曲率半径算出手段によって求められた曲率半径に基づいて、前記衝突判定条件を変更する、請求項1に記載の衝突判定装置。 - 前記曲率半径算出手段は、車速をヨーレートで除することによって前記曲率半径を求める、請求項8に記載の衝突判定装置。
- 自車両の位置する道路の曲率半径を求める曲率半径算出手段、を備え、
前記条件変更手段は、前記曲率半径算出手段によって求められた曲率半径に基づいて、前記他の車両の車幅及び車長の少なくとも一方を変更することによって前記衝突判定条件を変更する、請求項2に記載の衝突判定装置。 - 前記条件変更手段は、前記曲率半径算出手段によって求められた曲率半径に略比例して、前記他の車両の車長を変更することによって前記衝突判定条件を変更する、請求項10に記載の衝突判定装置。
- 前記進行方向判定手段は、前記他の車両の過去における進行軌跡に基づいて、前記他の車両がカーブ路を走行中であるか否か、を判定する、請求項1に記載の衝突判定装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2008/003927 WO2010073297A1 (ja) | 2008-12-24 | 2008-12-24 | 衝突判定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4831442B2 true JP4831442B2 (ja) | 2011-12-07 |
| JPWO2010073297A1 JPWO2010073297A1 (ja) | 2012-05-31 |
Family
ID=42286969
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010543643A Active JP4831442B2 (ja) | 2008-12-24 | 2008-12-24 | 衝突判定装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8483944B2 (ja) |
| JP (1) | JP4831442B2 (ja) |
| DE (1) | DE112008004238B4 (ja) |
| WO (1) | WO2010073297A1 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5146542B2 (ja) * | 2008-12-26 | 2013-02-20 | トヨタ自動車株式会社 | 走行路推定装置、及び当該装置で用いられる走行路推定方法 |
| EP2347940A1 (en) * | 2010-01-25 | 2011-07-27 | Autoliv Development AB | An object collision warning system and method for a motor vehicle |
| US8466807B2 (en) * | 2011-06-01 | 2013-06-18 | GM Global Technology Operations LLC | Fast collision detection technique for connected autonomous and manual vehicles |
| WO2013101055A1 (en) * | 2011-12-29 | 2013-07-04 | Intel Corporation | Navigation systems that enhance driver awareness |
| US9200904B2 (en) * | 2013-03-15 | 2015-12-01 | Caterpillar | Traffic analysis system utilizing position based awareness |
| JP5979259B2 (ja) * | 2015-01-20 | 2016-08-24 | トヨタ自動車株式会社 | 衝突回避制御装置 |
| JP6361698B2 (ja) * | 2016-06-24 | 2018-07-25 | トヨタ自動車株式会社 | 衝突回避装置 |
| US10025319B2 (en) * | 2016-08-31 | 2018-07-17 | Ford Global Technologies, Llc | Collision-warning system |
| JP6609237B2 (ja) * | 2016-11-17 | 2019-11-20 | 株式会社デンソー | 衝突判定装置、及び衝突判定方法 |
| JP7298744B2 (ja) * | 2016-12-07 | 2023-06-27 | スズキ株式会社 | 運転支援装置 |
| JP6515912B2 (ja) | 2016-12-22 | 2019-05-22 | トヨタ自動車株式会社 | 車両運転支援装置 |
| JP6544348B2 (ja) * | 2016-12-22 | 2019-07-17 | トヨタ自動車株式会社 | 車両運転支援装置 |
| US11158193B2 (en) * | 2017-05-22 | 2021-10-26 | Mitsubishi Electric Corporation | Position estimation apparatus, position estimation method, and computer readable medium |
| JP7135808B2 (ja) * | 2018-12-07 | 2022-09-13 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| CN109693669B (zh) * | 2018-12-29 | 2021-02-19 | 北京经纬恒润科技股份有限公司 | 一种确定最近在径前车的方法及系统 |
| KR102589935B1 (ko) * | 2019-04-18 | 2023-10-18 | 현대모비스 주식회사 | 카메라 신호 모니터링 장치 및 방법 |
| CN114643983B (zh) * | 2020-12-17 | 2025-08-15 | 深圳引望智能技术有限公司 | 控制方法和装置 |
| JP2024109318A (ja) * | 2023-02-01 | 2024-08-14 | トヨタ自動車株式会社 | 運転支援装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07262499A (ja) * | 1994-03-25 | 1995-10-13 | Nippondenso Co Ltd | 車両の障害物警報装置 |
| JPH0991598A (ja) * | 1995-09-25 | 1997-04-04 | Mazda Motor Corp | 車両の障害物検知装置 |
| JPH10172098A (ja) * | 1996-12-13 | 1998-06-26 | Denso Corp | 車速制御方法、車速制御装置および記憶媒体 |
| JP2000326757A (ja) * | 1999-05-18 | 2000-11-28 | Mitsubishi Electric Corp | 危険接近防止装置 |
| JP2004078333A (ja) * | 2002-08-12 | 2004-03-11 | Nissan Motor Co Ltd | 走行経路生成装置 |
| JP2007091102A (ja) * | 2005-09-29 | 2007-04-12 | Toyota Motor Corp | 障害物検出装置 |
| JP2007153203A (ja) * | 2005-12-07 | 2007-06-21 | Nissan Motor Co Ltd | 車両用後側方警報装置及びその方法 |
| JP2007279892A (ja) * | 2006-04-04 | 2007-10-25 | Honda Motor Co Ltd | 衝突予知システムの制御装置、衝突予知方法および乗員保護システム |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5388048A (en) * | 1993-02-16 | 1995-02-07 | Silicon Heights Limited | Vehicle anti-collison device |
| US5754099A (en) | 1994-03-25 | 1998-05-19 | Nippondenso Co., Ltd. | Obstacle warning system for a vehicle |
| US5964822A (en) * | 1997-08-27 | 1999-10-12 | Delco Electronics Corp. | Automatic sensor azimuth alignment |
| DE19750338A1 (de) * | 1997-11-13 | 1999-05-20 | Siemens Ag | Fahrtregelungssystem für Fahrzeuge, insbesondere für Kraftfahrzeuge |
| JP2000357299A (ja) * | 1999-06-16 | 2000-12-26 | Honda Motor Co Ltd | 車両の走行安全装置 |
| JP3896852B2 (ja) * | 2002-01-16 | 2007-03-22 | 株式会社デンソー | 車両用衝突被害軽減装置 |
| US7009500B2 (en) * | 2002-02-13 | 2006-03-07 | Ford Global Technologies, Llc | Method for operating a pre-crash sensing system in a vehicle having a countermeasure system using stereo cameras |
| US6950014B2 (en) * | 2002-02-13 | 2005-09-27 | Ford Global Technologies Llc | Method for operating a pre-crash sensing system in a vehicle having external airbags |
| US6794987B2 (en) * | 2002-07-01 | 2004-09-21 | Delphi Technologies, Inc. | Object detection system and method of estimating object size |
| US7522091B2 (en) * | 2002-07-15 | 2009-04-21 | Automotive Systems Laboratory, Inc. | Road curvature estimation system |
| JP2004136785A (ja) | 2002-10-17 | 2004-05-13 | Toyota Motor Corp | 車両用制御装置 |
| DE602004016520D1 (de) * | 2003-07-11 | 2008-10-23 | Toyota Motor Co Ltd | Aufprallsicherheitsfahrzeugsteuersystem |
| JP2005254835A (ja) * | 2004-03-09 | 2005-09-22 | Hitachi Ltd | 車両の走行制御装置及び車両制御ユニット |
| DE102004048530A1 (de) * | 2004-10-06 | 2006-04-13 | Daimlerchrysler Ag | Verfahren zum Betreiben eines Kollisionsvermeidungssystems für Fahrzeuge sowie Kollisionsvermeidungssystem |
| US7864032B2 (en) * | 2005-10-06 | 2011-01-04 | Fuji Jukogyo Kabushiki Kaisha | Collision determination device and vehicle behavior control device |
| JP2007137126A (ja) | 2005-11-15 | 2007-06-07 | Mazda Motor Corp | 車両の障害物検知装置 |
| US8583301B2 (en) * | 2008-02-15 | 2013-11-12 | Ford Global Technologies, Llc | Engine speed control for an engine in a hybrid electric vehicle powertrain for improved noise, vibration and harshness |
| JP5210233B2 (ja) * | 2009-04-14 | 2013-06-12 | 日立オートモティブシステムズ株式会社 | 車両用外界認識装置及びそれを用いた車両システム |
| EP2302412B1 (en) * | 2009-09-29 | 2012-08-15 | Volvo Car Corporation | System and method for evaluation of an automotive vehicle forward collision threat |
-
2008
- 2008-12-24 JP JP2010543643A patent/JP4831442B2/ja active Active
- 2008-12-24 WO PCT/JP2008/003927 patent/WO2010073297A1/ja not_active Ceased
- 2008-12-24 US US13/139,595 patent/US8483944B2/en active Active
- 2008-12-24 DE DE112008004238.1T patent/DE112008004238B4/de active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07262499A (ja) * | 1994-03-25 | 1995-10-13 | Nippondenso Co Ltd | 車両の障害物警報装置 |
| JPH0991598A (ja) * | 1995-09-25 | 1997-04-04 | Mazda Motor Corp | 車両の障害物検知装置 |
| JPH10172098A (ja) * | 1996-12-13 | 1998-06-26 | Denso Corp | 車速制御方法、車速制御装置および記憶媒体 |
| JP2000326757A (ja) * | 1999-05-18 | 2000-11-28 | Mitsubishi Electric Corp | 危険接近防止装置 |
| JP2004078333A (ja) * | 2002-08-12 | 2004-03-11 | Nissan Motor Co Ltd | 走行経路生成装置 |
| JP2007091102A (ja) * | 2005-09-29 | 2007-04-12 | Toyota Motor Corp | 障害物検出装置 |
| JP2007153203A (ja) * | 2005-12-07 | 2007-06-21 | Nissan Motor Co Ltd | 車両用後側方警報装置及びその方法 |
| JP2007279892A (ja) * | 2006-04-04 | 2007-10-25 | Honda Motor Co Ltd | 衝突予知システムの制御装置、衝突予知方法および乗員保護システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US8483944B2 (en) | 2013-07-09 |
| WO2010073297A1 (ja) | 2010-07-01 |
| US20110246071A1 (en) | 2011-10-06 |
| JPWO2010073297A1 (ja) | 2012-05-31 |
| DE112008004238T5 (de) | 2012-07-12 |
| DE112008004238B4 (de) | 2016-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4831442B2 (ja) | 衝突判定装置 | |
| JP4706984B2 (ja) | 衝突推定装置及び衝突推定方法 | |
| JP4869858B2 (ja) | 車両の走行制御システム | |
| US9352778B2 (en) | Lane keeping assist system and method | |
| CN102077259B (zh) | 车辆相对位置推定装置及车辆相对位置推定方法 | |
| US8847792B2 (en) | Object detection apparatus and object detection program | |
| US11338801B2 (en) | Collision avoidance device | |
| JP5120140B2 (ja) | 衝突推定装置及び衝突推定プログラム | |
| JP4832489B2 (ja) | 車線判定装置 | |
| JP6451857B2 (ja) | 走行制御装置の制御方法および走行制御装置 | |
| CN106053879A (zh) | 通过数据融合的失效操作的车辆速度估计 | |
| JP6020729B2 (ja) | 車両位置姿勢角推定装置及び車両位置姿勢角推定方法 | |
| KR20190056977A (ko) | 차량 제어 장치 | |
| US20080278349A1 (en) | Vehicle Deviation Preventing Control Device | |
| JP6011625B2 (ja) | 速度算出装置及び速度算出方法並びに衝突判定装置 | |
| JP6207952B2 (ja) | 先行車認識装置 | |
| JP2018045426A (ja) | 衝突確率推定装置 | |
| JP5561469B2 (ja) | ヨーレート補正装置、及びその方法 | |
| JP2008302850A (ja) | 衝突判定装置 | |
| KR20180006635A (ko) | 교차로 충돌 회피 시스템 및 그 제어 방법 | |
| JP4876847B2 (ja) | 車両の進行方向推定装置及び運転支援システム | |
| JP7056379B2 (ja) | 車両用走行制御装置 | |
| TWI719663B (zh) | 用於車道變換控制的側向軌跡追蹤方法及系統 | |
| KR102277479B1 (ko) | 차량의 곡률 반경 추정장치 및 그 방법 | |
| WO2021015065A1 (ja) | 衝突被害軽減装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20110823 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110825 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110907 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4831442 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140930 Year of fee payment: 3 |