JP4797775B2 - 2足型移動機構 - Google Patents
2足型移動機構 Download PDFInfo
- Publication number
- JP4797775B2 JP4797775B2 JP2006118677A JP2006118677A JP4797775B2 JP 4797775 B2 JP4797775 B2 JP 4797775B2 JP 2006118677 A JP2006118677 A JP 2006118677A JP 2006118677 A JP2006118677 A JP 2006118677A JP 4797775 B2 JP4797775 B2 JP 4797775B2
- Authority
- JP
- Japan
- Prior art keywords
- leg
- moving mechanism
- link
- wheel
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/022—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members consisting of members having both rotational and walking movements
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/01—Mobile robot
Description
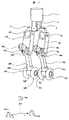
図1は2足型移動機構の全体を示し、下図に駆動方向の定義として、ロール方向(矢印Roll),ピッチ方向(矢印Pitch),ヨー方向(矢印Yaw)を示した図であり、胴体アクチュエータ3、第1脚アクチュエータ1aL,1aR、第2の脚アクチュエータ2aL,
2aR、第3の脚アクチュエータ3aL,3aRは内蔵された動力源(モータ)と減速機と角度検出器(ロータリエンコーダあるいはポテンショメータ)を備える。
第1胴体リンク2は胴体アクチュエータ3の出力軸に取り付けられ、ロール方向にのみ駆動される。胴体アクチュエータ3は第2胴体リンク4の中央部に取り付けられており、第1胴体リンク2を介して被搬送物1をロール軸方向に所定の角度だけ揺動する。
第2胴体リンク4には、胴体アクチュエータ3を鉛直方向に通過する軸を対称にして両端部に鉛直方向に長手方向を有する左足および右足が略並行に取り付けられる。左足と右足は構成要素が等しく、構造が胴体アクチュエータ3を通過する鉛直軸に対して対象であるため以下では左足について説明する。
1cLと、力センサ1cLに第2脚リンク2dLに対して逆面に取り付けられ自由に方向の変る車輪が設けられたキャスタ1bLと、力センサ2cLを介して第2脚リンク2dLに取り付けられたピッチ方向にのみ駆動する第3の脚アクチュエータ3aLと、第3の脚アクチュエータによって駆動される車輪2bL,3bLから構成される。
第1脚アクチュエータ1aLおよび第2の脚アクチュエータ2aLはピッチ方向にのみ所定の揺動角を備え、第3の脚アクチュエータ3aLは回転可能である。
3aRを駆動するための制御回路と、前記のアクチュエータを駆動する電源を備えており、2足型移動機構の目標角度と測定値を基にして所定の制御を行う。
車輪2bLと車輪3bLと車輪2bRと車輪3bRのみが地面に接地している状態を倒立モードと定義する。また、車輪2bLと車輪3bLのみが地面に接地している場合、もしくは車輪3bRと車輪3bRのみが地面に接地している場合もある。
車輪2bLと車輪3bLと車輪2bRと車輪3bRおよびキャスタ1bLとキャスタ
1bRが地面に接地している状態を安定モードと定義する。
第1胴体リンク2と第2胴体リンク4の角度、第2胴体リンク4の角度と第1脚リンク1dLの角度、第1脚リンク1dLと第2脚リンク2dLの角度、第2胴体リンク4の角度と第1脚リンク1dRの角度、第1脚リンク1dRと第2脚リンク2dRの角度、は倒立状態が保たれる範囲で決定する。
第1脚アクチュエータ1aL,1aRで第2胴体リンク4をピッチ方向に駆動し、前後方向の重心移動を行うこともできる。力センサ2cL,2cRで左右の脚にかかる荷重を検知し、胴体アクチュエータ3を所定の制御により駆動し、左右方向に重心移動を行い、左右の脚を交互に踏み出し、2足歩行することによって、段差を踏破できる。このように体重移動に1軸、左右の脚にピッチ方向の自由度を持つ軸が少なくとも2軸あれば歩行動作が可能である。
Claims (6)
- 第1脚アクチュエータと、第1脚リンクと、第2脚アクチュエータと、第2脚リンクとを有する左足及び右足と、を備え、前記第1脚リンク及び前記第2脚リンクを揺動することによって移動する2足型移動機構において、
被搬送物が載置され胴体アクチュエータの出力軸に取り付けられる第1胴体リンクと、
前記胴体アクチュエータを中央部に備え前記左足及び右足が取り付けられる第2胴体リンクと、
前記第2脚リンクの前記第1脚リンク側に取り付けられ方向が可変とされたキャスタと、
前記第2脚リンクの反前記第1脚リンク側に取り付けられた車輪と、
前記胴体アクチュエータで前記第1胴体リンクを揺動して左右方向の重心移動を行う制御手段と、を備えたことを特徴とする2足型移動機構。 - 請求項1記載の2足型移動機構において、
前記キャスタ及び前記車輪を接地して移動を行うことを特徴とする2足型移動機構。 - 請求項1記載の2足型移動機構において、
前記キャスタは力センサを介して前記第2脚リンクへ取り付けられていることを特徴とする2足型移動機構。 - 請求項1記載の2足型移動機構において、
前記キャスタは力センサを介して前記第2脚リンクへ取り付けられ、前記力センサで検知される荷重に基づいて前記胴体アクチュエータを制御することを特徴とする2足型移動機構。 - 請求項1記載の2足型移動機構において、
前記2足型移動機構は、前記キャスタ及び前記車輪を接地する安定モードと、前記車輪のみを接地する倒立モードとを備え、前記キャスタは力センサを介して前記第2脚リンクへ取り付けられ、前記力センサからの情報をもとに前記安定モード又は前記倒立モードの何れか一つのモードで前記2足型移動機構が制御されることを特徴とする2足型移動機構。 - 請求項1記載の2足型移動機構において、
前記キャスタ及び前記車輪を接地する安定モードと、前記車輪のみを接地する倒立モードと、を備え、車輪が駆動されることにより移動することを特徴とした2足型移動機構。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006118677A JP4797775B2 (ja) | 2006-04-24 | 2006-04-24 | 2足型移動機構 |
| KR1020070039153A KR100863028B1 (ko) | 2006-04-24 | 2007-04-23 | 2족형 이동기구 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006118677A JP4797775B2 (ja) | 2006-04-24 | 2006-04-24 | 2足型移動機構 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007290054A JP2007290054A (ja) | 2007-11-08 |
| JP2007290054A5 JP2007290054A5 (ja) | 2008-11-13 |
| JP4797775B2 true JP4797775B2 (ja) | 2011-10-19 |
Family
ID=38761177
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006118677A Expired - Fee Related JP4797775B2 (ja) | 2006-04-24 | 2006-04-24 | 2足型移動機構 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4797775B2 (ja) |
| KR (1) | KR100863028B1 (ja) |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100919670B1 (ko) * | 2008-01-04 | 2009-09-30 | 부산대학교 산학협력단 | 자동 주행 및 자세제어가 가능한 외바퀴 로봇 |
| JP4982413B2 (ja) * | 2008-03-19 | 2012-07-25 | 株式会社日立製作所 | 脚車輪型移動ロボット |
| KR20110010796A (ko) * | 2008-05-21 | 2011-02-07 | 조지아 테크 리서치 코포레이션 | 힘 균형 유지 이동성 로봇 시스템 |
| JP4766346B2 (ja) * | 2008-08-21 | 2011-09-07 | ブルボン電子株式会社 | ロボット犬 |
| JP2011045973A (ja) | 2009-08-28 | 2011-03-10 | Hitachi Ltd | ロボット |
| JP5432688B2 (ja) | 2009-12-03 | 2014-03-05 | 株式会社日立製作所 | 移動ロボット及びその走行安定化方法 |
| CN101791800B (zh) * | 2010-01-21 | 2011-05-25 | 西北工业大学 | 一种双轮差动式机器人运动控制方法 |
| JP5511523B2 (ja) * | 2010-06-04 | 2014-06-04 | 地方独立行政法人東京都立産業技術研究センター | 二脚型移動装置 |
| JP2016155216A (ja) * | 2015-02-23 | 2016-09-01 | Mk電産株式会社 | 2足歩行ロボット用無限軌道装置 |
| CN104973161B (zh) * | 2015-07-10 | 2017-05-10 | 陕西九立机器人制造有限公司 | 一种足式机器人的腿部结构 |
| CN105539627B (zh) * | 2015-12-25 | 2018-01-26 | 谭春升 | 一种代步工具 |
| US11180205B2 (en) * | 2016-04-05 | 2021-11-23 | Hitachi, Ltd. | Humanoid robot |
| KR101886125B1 (ko) * | 2016-12-12 | 2018-08-08 | 한국기술교육대학교 산학협력단 | 변형 가능한 밸런싱 로봇 |
| JP6701112B2 (ja) * | 2017-03-29 | 2020-05-27 | 株式会社クボタ | 作業車 |
| JP6745750B2 (ja) * | 2017-03-29 | 2020-08-26 | 株式会社クボタ | 作業車 |
| JP6745751B2 (ja) * | 2017-03-29 | 2020-08-26 | 株式会社クボタ | 作業車 |
| JP6701111B2 (ja) * | 2017-03-29 | 2020-05-27 | 株式会社クボタ | 作業車 |
| JP6739387B2 (ja) * | 2017-03-29 | 2020-08-12 | 株式会社クボタ | 作業車 |
| WO2018181459A1 (ja) * | 2017-03-29 | 2018-10-04 | 株式会社クボタ | 作業車 |
| US11260922B2 (en) | 2017-03-29 | 2022-03-01 | Kubota Corporation | Work vehicle |
| WO2019131573A1 (ja) * | 2017-12-25 | 2019-07-04 | 株式会社クボタ | 作業車 |
| JP7117989B2 (ja) * | 2017-12-25 | 2022-08-15 | 株式会社クボタ | 作業車 |
| JP6758277B2 (ja) * | 2017-12-25 | 2020-09-23 | 株式会社クボタ | 作業車 |
| CN111247055B (zh) * | 2017-12-25 | 2022-08-23 | 株式会社久保田 | 作业车 |
| CN108216412B (zh) * | 2017-12-26 | 2023-11-28 | 国网浙江省电力有限公司台州供电公司 | 一种轮腿式机器人 |
| CN111301548A (zh) * | 2020-03-27 | 2020-06-19 | 之江实验室 | 一种具有双足/四轮/四足运动模式的可重构足式机器人 |
| CN111516773A (zh) * | 2020-04-02 | 2020-08-11 | 之江实验室 | 一种具有多种运动模式的可重构双足机器人 |
| CN111942493B (zh) * | 2020-08-21 | 2021-05-25 | 常州大学 | 一种主被动复合模式的四足越障机器人 |
| CN111976861B (zh) * | 2020-08-28 | 2022-04-22 | 东北林业大学 | 一种车轮和机械腿关节复用电机传动系统及驱动方法 |
| CN112373593A (zh) * | 2020-11-18 | 2021-02-19 | 中国矿业大学 | 一种基于五杆机构的轮腿混合驱动矿用机器人 |
| CN114764241A (zh) * | 2021-01-14 | 2022-07-19 | 腾讯科技(深圳)有限公司 | 运动状态的控制方法、装置、设备及可读存储介质 |
| CN112776915B (zh) * | 2021-01-28 | 2022-06-07 | 南方科技大学 | 多姿态双足机器人 |
| CN112776914B (zh) * | 2021-01-28 | 2022-08-12 | 南方科技大学 | 双足机器人 |
| CN112776913B (zh) * | 2021-01-28 | 2022-06-07 | 南方科技大学 | 双足机器人 |
| CN113928440B (zh) * | 2021-10-28 | 2023-03-31 | 李金波 | 一种可自由切换运动模式的机器人 |
| CN114734470B (zh) * | 2022-03-16 | 2024-04-12 | 燕山大学 | 多形态变换爪足机构 |
| CN114987643B (zh) * | 2022-06-21 | 2023-08-08 | 上海工程技术大学 | 一种可实现轮腿两态切换及高矮宽窄变化的仿生机器人 |
| CN115123419A (zh) * | 2022-07-29 | 2022-09-30 | 广东亿嘉和科技有限公司 | 一种具备力平衡及中空走线的轮足机器人腿部及工作方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05285864A (ja) * | 1992-04-08 | 1993-11-02 | Toshiba Corp | 二足移動歩行装置 |
| JP4272336B2 (ja) * | 2000-08-11 | 2009-06-03 | 株式会社バンダイ | 歩行装置 |
| JP2003019363A (ja) * | 2001-07-09 | 2003-01-21 | Koji Yamana | 簡単な構成で2足歩行動作を行うラジコン2足歩行ロボット |
| JP2004055967A (ja) * | 2002-07-23 | 2004-02-19 | Matsushita Electric Ind Co Ltd | 電子部品内蔵基板の製造方法 |
| JP4078146B2 (ja) * | 2002-08-07 | 2008-04-23 | 倉敷化工株式会社 | 標示用ポール |
| JP4258456B2 (ja) * | 2004-09-14 | 2009-04-30 | トヨタ自動車株式会社 | ロボット |
-
2006
- 2006-04-24 JP JP2006118677A patent/JP4797775B2/ja not_active Expired - Fee Related
-
2007
- 2007-04-23 KR KR1020070039153A patent/KR100863028B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| KR100863028B1 (ko) | 2008-10-10 |
| KR20070104847A (ko) | 2007-10-29 |
| JP2007290054A (ja) | 2007-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4797775B2 (ja) | 2足型移動機構 | |
| JP5427231B2 (ja) | 二脚歩行式移動装置 | |
| US8387726B2 (en) | Legged mobile robot | |
| JP3435666B2 (ja) | ロボット | |
| KR101049626B1 (ko) | 로봇 | |
| JP2014161991A (ja) | ロボットの移動機構及びそれを備えるロボット | |
| JP4924179B2 (ja) | 倒立車輪型移動体、及びその制御方法 | |
| US7111696B2 (en) | Legged mobile robot | |
| US7946364B2 (en) | Legged robot | |
| JP2007290054A5 (ja) | ||
| JP2010030568A (ja) | 車体構造及び同軸二輪車 | |
| WO2009008292A1 (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP4299583B2 (ja) | 脚式移動ロボット | |
| JP2003266337A (ja) | 2足歩行ロボット | |
| JP2009154256A (ja) | 車輪付脚式移動装置 | |
| JP4258456B2 (ja) | ロボット | |
| JP2006055972A (ja) | 足部走行機構及びそれを備えた2足歩行ロボット | |
| JP2005288561A (ja) | ヒューマノイドロボット | |
| JP4675356B2 (ja) | 脚式移動ロボット | |
| JP2009101897A (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP2009035157A (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP5528916B2 (ja) | ロボット及びロボットの外力検出機構 | |
| JP2005186650A (ja) | 搭乗型ロボット | |
| KR101267800B1 (ko) | 다리식 이동 로봇 및 요동 구조 | |
| KR100493214B1 (ko) | 무단변속 기능을 갖는 전방향 차량 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080925 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080925 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110426 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110705 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110718 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140812 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4797775 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140812 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |