JP4776779B2 - 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 - Google Patents
捩り撓みヒンジで連結されて相対的に回転する微細加工部材 Download PDFInfo
- Publication number
- JP4776779B2 JP4776779B2 JP2000568104A JP2000568104A JP4776779B2 JP 4776779 B2 JP4776779 B2 JP 4776779B2 JP 2000568104 A JP2000568104 A JP 2000568104A JP 2000568104 A JP2000568104 A JP 2000568104A JP 4776779 B2 JP4776779 B2 JP 4776779B2
- Authority
- JP
- Japan
- Prior art keywords
- plate
- torsion
- hinge
- torsional
- torsion bar
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 claims description 52
- 229910052710 silicon Inorganic materials 0.000 claims description 48
- 239000010703 silicon Substances 0.000 claims description 48
- 239000000758 substrate Substances 0.000 claims description 20
- 230000004044 response Effects 0.000 claims description 9
- 239000004065 semiconductor Substances 0.000 claims description 5
- 238000005459 micromachining Methods 0.000 claims 1
- 235000012431 wafers Nutrition 0.000 description 33
- 239000010410 layer Substances 0.000 description 32
- 238000000576 coating method Methods 0.000 description 27
- 239000000463 material Substances 0.000 description 25
- 229910052751 metal Inorganic materials 0.000 description 19
- 239000002184 metal Substances 0.000 description 19
- 229920000052 poly(p-xylylene) Polymers 0.000 description 17
- 239000011248 coating agent Substances 0.000 description 16
- 230000002829 reductive effect Effects 0.000 description 14
- 238000004873 anchoring Methods 0.000 description 12
- 238000000034 method Methods 0.000 description 12
- 230000036961 partial effect Effects 0.000 description 12
- 238000005452 bending Methods 0.000 description 11
- 230000008859 change Effects 0.000 description 11
- 238000013016 damping Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 9
- 238000002310 reflectometry Methods 0.000 description 9
- 238000000926 separation method Methods 0.000 description 9
- 230000033001 locomotion Effects 0.000 description 8
- 238000004519 manufacturing process Methods 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 8
- 230000005686 electrostatic field Effects 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 7
- 150000004767 nitrides Chemical class 0.000 description 7
- 230000010287 polarization Effects 0.000 description 7
- 238000001228 spectrum Methods 0.000 description 7
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 6
- 239000012528 membrane Substances 0.000 description 6
- 239000012790 adhesive layer Substances 0.000 description 5
- 230000008901 benefit Effects 0.000 description 5
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 230000005684 electric field Effects 0.000 description 4
- 238000005530 etching Methods 0.000 description 4
- 229910010272 inorganic material Inorganic materials 0.000 description 4
- 239000011147 inorganic material Substances 0.000 description 4
- 239000012212 insulator Substances 0.000 description 4
- 238000007747 plating Methods 0.000 description 4
- 239000007787 solid Substances 0.000 description 4
- 238000004544 sputter deposition Methods 0.000 description 4
- 239000000725 suspension Substances 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 238000000151 deposition Methods 0.000 description 3
- 238000001020 plasma etching Methods 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 239000000377 silicon dioxide Substances 0.000 description 3
- 235000012239 silicon dioxide Nutrition 0.000 description 3
- 239000004642 Polyimide Substances 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 239000011651 chromium Substances 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 229910021420 polycrystalline silicon Inorganic materials 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 229920005591 polysilicon Polymers 0.000 description 2
- 230000003014 reinforcing effect Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 239000002210 silicon-based material Substances 0.000 description 2
- 230000006641 stabilisation Effects 0.000 description 2
- 238000011105 stabilization Methods 0.000 description 2
- 239000013589 supplement Substances 0.000 description 2
- 239000010936 titanium Substances 0.000 description 2
- 238000001771 vacuum deposition Methods 0.000 description 2
- 238000007740 vapor deposition Methods 0.000 description 2
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- QCWXUUIWCKQGHC-UHFFFAOYSA-N Zirconium Chemical compound [Zr] QCWXUUIWCKQGHC-UHFFFAOYSA-N 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000002776 aggregation Effects 0.000 description 1
- 238000004220 aggregation Methods 0.000 description 1
- 229910021417 amorphous silicon Inorganic materials 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 238000010924 continuous production Methods 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000005137 deposition process Methods 0.000 description 1
- 239000003989 dielectric material Substances 0.000 description 1
- 238000010790 dilution Methods 0.000 description 1
- 239000012895 dilution Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000010892 electric spark Methods 0.000 description 1
- 238000000313 electron-beam-induced deposition Methods 0.000 description 1
- 230000009881 electrostatic interaction Effects 0.000 description 1
- 238000005421 electrostatic potential Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- QUCZBHXJAUTYHE-UHFFFAOYSA-N gold Chemical compound [Au].[Au] QUCZBHXJAUTYHE-UHFFFAOYSA-N 0.000 description 1
- 230000017525 heat dissipation Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000001465 metallisation Methods 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 238000001579 optical reflectometry Methods 0.000 description 1
- 239000011368 organic material Substances 0.000 description 1
- -1 oxide Substances 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000009966 trimming Methods 0.000 description 1
- 229910052726 zirconium Inorganic materials 0.000 description 1
Images



















































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q11/00—Selecting arrangements for multiplex systems
- H04Q11/0001—Selecting arrangements for multiplex systems using optical switching
- H04Q11/0005—Switch and router aspects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B3/00—Devices comprising flexible or deformable elements, e.g. comprising elastic tongues or membranes
- B81B3/0035—Constitution or structural means for controlling the movement of the flexible or deformable elements
- B81B3/0051—For defining the movement, i.e. structures that guide or limit the movement of an element
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/0841—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting element being moved or deformed by electrostatic means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/085—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting means being moved or deformed by electromagnetic means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/26—Optical coupling means
- G02B6/32—Optical coupling means having lens focusing means positioned between opposed fibre ends
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/26—Optical coupling means
- G02B6/32—Optical coupling means having lens focusing means positioned between opposed fibre ends
- G02B6/327—Optical coupling means having lens focusing means positioned between opposed fibre ends with angled interfaces to reduce reflections
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2201/00—Specific applications of microelectromechanical systems
- B81B2201/04—Optical MEMS
- B81B2201/042—Micromirrors, not used as optical switches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2201/00—Specific applications of microelectromechanical systems
- B81B2201/04—Optical MEMS
- B81B2201/045—Optical switches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2203/00—Basic microelectromechanical structures
- B81B2203/05—Type of movement
- B81B2203/058—Rotation out of a plane parallel to the substrate
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/26—Optical coupling means
- G02B6/35—Optical coupling means having switching means
- G02B6/351—Optical coupling means having switching means involving stationary waveguides with moving interposed optical elements
- G02B6/3512—Optical coupling means having switching means involving stationary waveguides with moving interposed optical elements the optical element being reflective, e.g. mirror
- G02B6/3518—Optical coupling means having switching means involving stationary waveguides with moving interposed optical elements the optical element being reflective, e.g. mirror the reflective optical element being an intrinsic part of a MEMS device, i.e. fabricated together with the MEMS device
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/26—Optical coupling means
- G02B6/35—Optical coupling means having switching means
- G02B6/3564—Mechanical details of the actuation mechanism associated with the moving element or mounting mechanism details
- G02B6/3568—Mechanical details of the actuation mechanism associated with the moving element or mounting mechanism details characterised by the actuating force
- G02B6/357—Electrostatic force
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/26—Optical coupling means
- G02B6/35—Optical coupling means having switching means
- G02B6/3564—Mechanical details of the actuation mechanism associated with the moving element or mounting mechanism details
- G02B6/3584—Mechanical details of the actuation mechanism associated with the moving element or mounting mechanism details constructional details of an associated actuator having a MEMS construction, i.e. constructed using semiconductor technology such as etching
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q11/00—Selecting arrangements for multiplex systems
- H04Q11/0001—Selecting arrangements for multiplex systems using optical switching
- H04Q11/0005—Switch and router aspects
- H04Q2011/0007—Construction
- H04Q2011/0026—Construction using free space propagation (e.g. lenses, mirrors)
- H04Q2011/003—Construction using free space propagation (e.g. lenses, mirrors) using switches based on microelectro-mechanical systems [MEMS]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q11/00—Selecting arrangements for multiplex systems
- H04Q11/0001—Selecting arrangements for multiplex systems using optical switching
- H04Q11/0005—Switch and router aspects
- H04Q2011/0037—Operation
- H04Q2011/0039—Electrical control
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q11/00—Selecting arrangements for multiplex systems
- H04Q11/0001—Selecting arrangements for multiplex systems using optical switching
- H04Q11/0005—Switch and router aspects
- H04Q2011/0037—Operation
- H04Q2011/0043—Fault tolerance
Description
【産業上の利用分野】
本発明は一般には一体製造になる微細加工構造体、より詳しくは第1のフレームをプレート又は第2のフレームに連結させ、このプレート又は第2のフレームを第1のフレームに対し、軸を中心として回転させるようにして成る微細加工構造体に関する。
【0002】
【従来の技術】
多くの多様な用途のある基本的微細構造体の一つに捩り振動子がある。これは、第1のフレームとプレート又は第2のフレームとが直径反対側にあって対向し、両者の間に延びる捩りバーで連結されて形成されるものである。この捩りバーによれば、第1のフレームに対して第2のフレーム又はプレートを、捩りバーが設定する軸を中心として回転(回動)させることが出来る。この基本的微細加工構造体の実用的用途には、米国特許第5629790号(以下、「790」特許)に記載の、反射面を有する光ビーム微細加工捩りスキャナが有り、その適用例は米国特許第5841553号(以下、「553特許」)に記載されているようなディジタル画像化、バーコード読み取り及び印刷や、名称が「微細加工素子を用いる光学ヘッド」であるPCT出願公開公報WO98/09289(以下、09289PCT公報)に記載されているような磁気光学的記録等である。上記基本微細加工構造体はまた、米国特許第5488862号に記載のレートジャイロスコープや米国特許第5861549号に記載の表面検査システムに用いられるプロフィルメーター及び/又は原子顕微鏡(AFM)ヘッド)等の他の種々の科学的及び産業システムに用いられる。
【0003】
全体として上記特許には、静電力及び電磁力をプレート及び/又は第2のフレームに印加して、捩りバーが設定する軸の周りの回転を付勢する種々の技術が記載されている。この基本微細加工構造体の有用性は、米国特許第5648618号(618特許)に記載されているように、捩りセンサを捩りバーの少なくとも一つに一体に組み込み、第1のフレーム対して第2のフレーム又はプレートが捩りバーの設定する軸を中心としてなす回転(回動)を測定することにより、大きく向上する。
【0004】
図1に、捩り振動子、即ちその典型的例である上記790特許に記載の捩りスキャナが示されている。一般参照番号52で表示されているこの捩りスキャナは、囲繞するフレーム56から内側に延びて捩りスキャナプレート58を支持する捩りバー54を備え、プレート58を捩りバー54が設定する軸の周りに回転させる。フレーム56は絶縁性基板64上に戴置されてい、後者には一対の導電性電極66も保持されている。フレーム56上に位置を占めるフレーム状の間隔子68が膜窓72を、プレート58上方の短い距離に支持している。図1に矢印線で示された光ビーム74が膜窓72を通して入射し、プレート58上のミラー面76に当たって反射し、次いで膜窓72を通って捩りスキャナ52を出る。プレート58と先ず電極66の一方との間、次いで他方との間と、両者間に交互に電圧Vが印加され、この電圧がプレート58の主捩り振動モードの振動数で両電極間を前後に切り替わると、静電力がプレート58に加わり、プレート58を軸62の周りにこの周波数で前後に回転駆動する。
【0005】
光ビーム捩りスキャナ52に基本微細加工構造体を用いると、プレート58又は第2のフレーム上のミラー面76は、通常固定光源からの光ビーム74を数度から数十度の角度で偏向する。このような捩りスキャナ52を用いて、光ビームをプレート58又は第2のフレームの機械的共振振動数で一部決定される振動数で前後に走査することが出来る。或いはまた、捩りスキャナ52を用いて、光ビームが単数の素子又は複数の別の素子に当たる点を二つ以上の交互位置の間で移動、切り替えることが出来る。
【0006】
上記790特許には、実用的捩り振動子がもつべき機械的振動モードの臨界的スペクトルが記載されている。このモードスペクトルは捩りスキャナ52を、特にビデオ周波数(振動数)又はそれ以上の高い振動数で正弦振動させるのに有利である。同じモードスペクトルはまた、光ビーム74が異なる複数の素子に当たる位置を切り替えるとき等の、捩りスキャナ52が準静的モードで動作する場合にも有利である。準静的モードで回転する捩りスキャナ52は、或る時間一つの向きに留まり、次いで比較的大角度回転して他の向きになり、そこで再び或る時間留まるように動作する。
【0007】
米国特許第5673139号(以下139特許)の図2に示されているような、複数の捩りスキャナ52を1軸又は2軸回転させ、且つ極めて密に充填する必要が有る用途においては、フレーム56とプレート58又は第2のフレームとの間の、捩りバー54の長さが占める空きスペースを除くことが屡々望ましい。この空きスペースは、捩りバー54の長さが139特許に図示のような「蝶形フレーム」内、又は蝶形プレート58内に位置付けられれば、除くことが出来る。だが、捩りバー54は極めて長く、細長くなる傾向があるので、蝶形プレート58、又は139特許に図示されたもののような蝶形フレームでさえ、過剰に大きいスペースを占めることがある。捩りバー54の占めるスペース小さくしようとして、単にこれを短くして良いものではない。短くすると捩りバー54は剛性を増し、剛性が増せば、主捩り振動モードの振動数がより高くなり、また軸62を中心としてプレート58又は第2のフレームを回転させるために要する力を増大させることになるからである。
【0008】
多くの場合、種々の理由により上記のように低パワー静電場でプレート58を付勢することが極めて望ましい。だが、捩りスキャナ52の適用例によっては、プレート52を大角度で回転することを要することがある。静電不安定性のため、静電力を用いてプレート58又は第2のフレームの回転を静電的又は動的に付勢するとき、角回転に比例する信号を静電駆動信号発生回路にフィードバックせずにこれを行おうとすると、プレート58の回転角度に制限が生じるのが一般である。
【0009】
静電不安定性が生じる原因は、捩りバー54がプレート58に加える復元トルクがプレート58の回転と共に線形に増大し、且つプレート58と電極66の一方との間の静電吸引により発生される駆動トルクが、両者間の隔離距離の減少と共に二次式的に増大することによる。静電駆動されて正弦振動する捩りスキャナがその主捩り振動モードの共振振動数で動作する場合は、静電不安定性は殆ど問題ではない。プレート58が回転して、近い電極66に最近接するとき、電極66とプレート58間に加わる電圧は一般にゼロ(0.0)であるからである。即ち、静電駆動されて正弦振動する捩りスキャナがその主捩り振動モードの共振振動数で動作する場合、プレート58のなす回転と、プレート58と電極66の先ず一方との間、次に他方との間と、交互して印加される電圧Vの印加とは、違相であって、両者間に位相のずれ、即ちラグが有る。だが、準静的動作では、或る閾地を越える一定の電圧Vがプレート58と電極66の一方に跨って印加されると、軸62を中心とするプレート58の回転は不安定になる。即ち、プレート58と電極66の一方に印加される電圧Vが或る特定の値を取り、この電圧に応答してプレート58が或る特定の角度に回転する場合、機械的に拘束されていないとプレート58は電圧Vに変化がないでの、電極66に最近接した或る位置まで継続回転するのである。
【0010】
図2のカーブ群は、静電不安定性の現象をグラフで示すものである。図2の直線82は、捩りバー54の捩りバネ常数に比例して左から右に上方に傾斜し、捩りバー54が軸62を中心として種々の角度向きまで回転してプレート58に加える復元トルクの量を表す。図2の駆動トルク曲線84a、84b、84cは、軸62を中心とするプレート58の回転の種々の回転角に対して、プレート58と電極66間の、順次高くした一定電圧Va、Vb、Vcによってプレート58に加えられる駆動トルクを示す。或る特定の電圧Va又はVbでの静電吸引駆動トルクは直線82の示す復元トルクに関連して、駆動トルク曲線84a及び84bがAa及びAbとそれぞれ表示されている点で直線82に交差するところで平衡している。駆動トルク曲線84aに対する第1の交差点Aaは、プレート58が更に回転してプレート58に静電的に加わる駆動トルクの増大より大きい復元力を発生する安定平衡点である。第2の交差点Baは、プレート58の回転角度をどう大きくしても静電駆動トルクが復元トルクより速く増大するため、不安定平衡点である。従って、駆動トルク曲線84aにより表された電圧に対して、直線82と駆動トルク曲線84aがBaで交差する角度までプレート58が回転するなら、機械的に拘束されていなければプレート58は、電圧Vに変化がないので電極66に最近接する位置まで継続回転する。
【0011】
固定電圧Vが上昇、例えば駆動トルク曲線84aから駆動トルク曲線84bに上昇すると、静電印加の駆動トルクは増大し、二つの交差点は共に移動して点Abと点Bbに近づく。だが、プレート58と電極66に跨って印加される電圧が引き続いて上昇すると、復元トルクとトルクの曲線は遂には正接するようになる。正接が起こると、安定な交差点は最早存在せず、その値の一定電圧Vの印加によりプレート58は瞬時に動いて、下にある電極66に向かって激しく動く。この状況は、これ等二つの交差点が一点AcBcで一致する駆動トルク曲線84cにより説明される。従って、駆動トルク曲線84cで示される電圧Vは、静電駆動信号を発生する回路へ角回転に比例する信号がフィードバックされなければ、最早それ以上静電的に安定ではない。従って、プレート58の準静的回転は角回転フィードバック無くして、プレート58の多くの望ましい角度向きに対して制御され得ない。
【0012】
この静電不安定性のため、軸62を中心とするプレート58の静電付勢回転はプレート58の静止位置と電極66間の隔離距離の約1/3に制限される。プレート58の或る特定の寸法に対して、角回転信号を静電駆動回路にフィードバックせずに或る程度の回転角を得るには、プレート58と電極66間の間隔を大きくする必要がある。だが、プレート58と電極66間の間隔を広くすると、より高い電圧をプレート58と電極66に跨って印加する必要が有る。だが、プレート58と電極66間に印加される電圧を高くできる限度は、その電圧が両者間の絶縁破壊電圧を超え得ないと云う理由により制限される。その代わりに、静電不安定性の生じる図2の領域での捩りバネ常数を増大すると、プレート58と電極66間の間隔を増大しなくても、軸62を中心とするより大きい角回転にも安定平衡が得られるようになる。
【0013】
前記09289PCT公報には、非線形捩りバネ常数をもつ捩りスキャナが図示、記載されている。本出願の図3及び上記PCT公報の図3に示されているように、上記PCT公報に開示された捩りバー54の捩りバネ常数は、単数又は複数の係留体(テザ)86をプレート58に取り付けることにより非線形となる。係留体86は窒化物又は酸化物製で、捩りバー54が設定する軸62に平行に向い波形起伏の有るバネから成る。プレート58が軸62を中心として回転するに従い、係留体86は初め捩りバー54の捩りバネ常数を僅かに増大するのみである。だが、プレート58が軸62を中心として更に回転するに従い、係留体86の加えるトルクは急速に増大し、それにより図3に示した捩りスキャナ52に対し非線形捩りバネ常数を創出する。
【0014】
図3aは、図3に示したプレート58と電極66の一方の間に一定電圧を印加した場合の駆動トルク曲線を示す。図3aにおける第1の直線区分94aは、プレート58が軸62の周りに初期回転して臨界角度配向するまで捩りバー54によってのみ加えられる仮想的復元トルクを示す。図3aにおける第2の直線区分94bは、プレート58が軸62の周りに臨界角度配向を超えて回転して、捩りバー54が係留体86と共に仮想的に加える復元トルクを示す。図3aにおける二つの線区分94aと94bの異なる傾斜は、係留体86がプレート58に加える拘束のため、捩りバネ常数が臨界角度配向においてk1からk2に変化することを示す。捩りバネ常数がk1と低いと、プレート58は軸62を中心として初め良好に回転できる。捩りバネ常数がk1からk2に変化することにより、軸62を中心としてプレート58が大きく角回転しても静電不安定性は無い。だが、現実としては、図3aで示唆されている、柔軟から剛性への捩りバネ常数の急激な変化を係留体86が実際には生じないことを当業者は認めよう。
【0015】
それでも、図3に示す捩りスキャナ52では、捩りバー54の捩りバネ常数が係留体86のバネ常数に対する効果と比較して小さいなら、プレート58の回転は係留体86により支配され得るのである。更に、係留体86がプレート58を対称的に拘束しなくても、前者は後者を撓みて、その光学的平坦度を壊そうとする。このPCT公報09289で言及しているように、図3に示された係留部86を備える捩りスキャナ52によれば、捩りバネ常数の極端な非線形性を係留体が生じているから、プレート58が軸62を中心として高々±2.0°安定に回転するのを可能にするに過ぎない。
【0016】
前記790特許は、プレート58又は第2のフレームの周りに箱枠(ボックスフレーム)強化リムを設けても、捩りスキャナ52が得られることの利点を開示している。箱枠強化リムはプレート58又は第2のフレームの厚さをその外周部で厚くすると共に、その構造体の残部を薄いままにする。箱枠強化リムはプレート58を光学的に平坦に保ち、また捩りバー54とフレーム56とが厚みを異にするようにし、それにより捩りスキャナ52の剛性を増大している。中実のプレート58又は第2のフレームと比較して、プレート58又は第2のフレームを箱枠で強化すると、プレート58又は第2のフレームの質量が減らすと共に、その慣性モーメントを保持している。慣性モーメンを大きくすると、Buser et alの解析で説明されているように(Sens.& Act.,A23,1990,pg.323)捩りスキャナ52のQが増大する。
【0017】
反射捩りスキャナの製造における主要な関心事は、動作温度範囲の全体に亘るミラー面76の反射率と平坦度である。プレート58の反射率を増大したり、それからの反射光の偏光を制御するには、ミラー面76に誘電性被膜を付着することが必要となる。金属被覆ミラー面76に通常、酸化物、窒化物等の無機材料を付着して、所望の反射特性を得る。そのような無機材料被膜は厚さが0.1〜0.2ミクロンであって、特に僅か数ミクロンの厚さに過ぎない捩りスキャナにかかる被膜を付着させるのであるから、被膜がプレート58に及ぼす応力が主要な問題となる。
【0018】
ある種の用途では、捩り振動子はプレート58から有意の熱量を散逸させなければならない。例えば、軸62を中心とするフレーム56に対するプレート58の回転をプレート58にコイルを取り付け、これを用いて電磁的に付勢する場合、プレート58はコイルを流れる電流により発生された熱を散逸、即ちI2R加熱を散逸させなければならない。だが、たとえプレート58がコイルを保持していなくても、静電力が回転を付勢するのであるから、反射率が98.5%のミラー面76から100mWの光ビームを反射して得るには、プレート58は入射光ビーム74による1.5mWのエネルギーを散逸させることが必要となる。面積が1.0mm2の、熱伝導率の比較的低い材料であるシリコンに1.5mWのエネルギーを吸収させると、プレート58の温度は周囲温度上20.0〜30.0℃に上昇することがある。プレート58の熱伝導率が捩りスキャナ52の残部のものに対して悪い場合には、プレート58の温度は更に劇的に増大する。
【0019】
二次元(2D)ポインティング又はスキャニング等の捩りセンサ52の多くの適用例において、数個のリード線をフレーム56から、前記618特許に記載されているような捩りセンサを備える捩りバー54を介してプレート58に通す必要のある場合がある。これ等多数の電気リード線の位置は、捩りバー54の幅により厳しく制限される。また、捩りバー54は極めて細いので、電気リード線の設置と捩りセンサの動作をも制約する。
【0020】
光ファイバースイッチング等のような反射性微細加工捩りスキャナの種々の適用例は、2Dラスタの少なくとも一軸に沿う静止的又は準静止的位置決めを採用した光ビームの光学的位置合わせのために捩りスキャナ52を用いることを想定している。プレート58に対する他の非平行回転軸は、光ビームの周期的移動(正弦、線形)或いは静止的又は準静止的位置決めに供しても良い。そのような適用例では、ミラー面76を光ビーム路に急激に移動させることにより、光ビームを有効にオン・オフ切り替えることが出来る。かかる適用例では通常、プレート58を出来るだけ速やかに光りビーム路に移動させることが望ましい。更に、ミラー面76が光りビームに交差した後、ミラー面76が光ビームを反射する角度を細密トリム調整、即ち適合調整するのが有利であるか、必要でさえある場合も有る。
【0021】
光ファイバースイッチング技術では、プレート58のかかる複合移動により、一軸又は2軸トラッキングを行い、光ビームをターゲットに保持することが出来る。かかるポインティング適用例では、光ビームを少なくとも1軸に沿って、比較的大角度に偏向し、次いで光ビームを比較的長い期間、特定の角度に保持すると共に、捩りスキャナ52内の微小量のパワーを散逸させることが必要である。かかる準静止的ポインティング適用例では、プレート58を比較的大角度、例えば5°〜45°回転させた後、静止したままに置かなければならない。かかる大角度回転は静電的には、既に説明の通り、プレート58を静電的に大きく回転するにはプレート58と電極66間に極めて大きな間隔が必要となるから、達成が極めて困難である。かかる大角度回転は電磁的にも、プレート58に保持したコイルの発生する磁場が軸62を中心とするプレート58の回転に伴い外部一方向磁場に関して再配向されてしまうので、達成が困難である。従って、電磁的に付勢してプレート58の比較的大角度回転を得るには通常、コイルに極大電流を流すと共に、プレート58を一定角度回転に保持することが必要である。前述のように、かかる大電流はプレート58の温度を有意に上昇する。
【0022】
引用により、上記790特許、553特許、618特許及び324特許、及び09289PCT公報をここに挿入する。
【0023】
【発明が解決しようとする課題】
本発明の目的は、捩り撓みヒンジで連結されて相対的に回転(回動)する微細加工部材の改良された構造体を提供することにある。
【0024】
本発明の他の目的は、捩り撓みヒンジで連結されて相対的に回転する微細加工部材の動作特性を改良することにある。
【0025】
本発明の他の目的は、従来の折返しのない捩りバーよりコンパクトな、相対的回転のために連結される微細加工部材用捩り撓みヒンジを提供することにある。
【0026】
本発明の他の目的は、相対的回転のために連結される微細加工部材に対する捩り撓みヒンジであって、部材の主捩り振動モードの振動数と部材の他の振動モードの振動数との間に増大した分離を示すヒンジを提供することにある。
【0027】
本発明の他の目的は、捩り撓みヒンジで連結されて相対的に回転する微細加工部材の改良された構造体であって、捩り撓みヒンジの設定する軸を中心として部材を回転させるのに要するトルクが、微細加工部材の角回転の増大と共に非線形に増大する構造体を提供することにある。
【0028】
本発明の他の目的は、相対的回転のために捩り撓みヒンジで連結される微細加工部材捩り撓みヒンジが設定する軸を中心として回転させる駆動信号であって、微細加工部材の角度撓みと共に非線形に変化する駆動信号を印加する静電駆動回路を提供することにある。
【0029】
本発明の他の目的は、相対的回転のために捩り撓みヒンジで連結される微細加工部材を回転するのに要する静電ポテンシャルを低下することにある。
【0030】
本発明の他の目的は、相対的回転のために捩り撓みヒンジで連結され、高い熱伝導率を有する微細加工部材の構造体を提供することにある。
【0031】
本発明の他の目的は、相対回転のために微細加工部材を連結するものであって、捩りセンサを備えた捩り撓みヒンジを強化することにある。
【0032】
本発明の他の目的は、微細加工部材の平坦度を変えずに微細加工部材の光学的反射率を向上する方法を提供することにある。
【0033】
本発明の他の目的は、ミラー面の反射特性をあつらえることの出来る光学的反射性微細加工部材の構造体を提供することにある。
【0034】
本発明の他の目的は、偏光感応性スキャン光検出器を備える微細加工部材を提供することにある。
【0035】
本発明の他の目的は、捩り撓みヒンジで連結されて相対的に回転する微細加工部材の構造体と共に、捩り撓みヒンジの設定する軸を中心として部材を特定の角度回転で速やかに回転させるための電子駆動装置を提供することにある。
【0036】
本発明の他の目的は、捩り撓みヒンジで連結されて相対的に回転する微細加工部材の構造体と共に、捩り撓みヒンジの軸を中心として部材を特定の角度回転で速やかに回転させ、次いで微細加工部材を特定の角度配向で直ちに固定するための低電力消費電子駆動装置を提供することにある。
【0037】
本発明の他の目的は、捩り撓みヒンジで連結されて相対的に回転する微細加工部材の構造体と共に、部材が指定の角度回転して、その向きに固定された後、部材の向きを微調整できる低電力消費電子駆動装置を提供することにある。
【0038】
【課題を解決するための手段】
簡潔に云って、本発明に含まれる改良された一体化微細加工構造体は規準部材と、規準部材から突出し、且つ直径反対方向にあって、互いに対向する一対の捩り撓みヒンジと、規準部材側から上記一対の捩り撓みヒンジにより支持される動的(ダイナミック)部材を備える。捩り撓みヒンジは動的部材を規準部材側から支持して、捩り撓みヒンジの対が設定する軸の周りに回転(回動)させる。本明細書で用いらる用語「捩り撓みヒンジ」は最も広義に用いられるとき、従来の折返しのない捩りバーを包括し、また動的部材が捩り撓みヒンジの設定する軸を中心として回転するとき、構造内の一つ又は複数のヒンジセグメントが純粋の捩りを経験しないヒンジ構造をも包括する。規準部材、捩り撓みヒンジの対及び動的部材は全て、シリコン基体の応力のない半導体層を用いて一体に製造されるものである。この一体化微細加工構造体にはまた、捩り撓みヒンジが設定する軸を中心とする回転運動(回動)を動的部材に付与する駆動手段が備わる。この駆動手段は動的部材にトルクを静電的又は電磁的に、これ等を単独で又は組み合わせで印加することが出来る。
【0039】
一実施態様において、この改良された微細加工構造体は少なくとも3個の捩りバーセグメントの第1の端部同士を連結することにより、上記捩り撓みヒンジの少なくとも1個を形成する。各捩りバーセグメントの第1の端部は、規準部材と動的部材間のマルチセグメント捩り撓みヒンジに沿って位置付けられる。他の実施態様においては、この改良された微細加工構造体は規準部材と動的部材間に二本つりビームを配設することにより、上記捩り撓みヒンジの少なくとも1個を形成する。二本つりビームは、捩り撓みヒンジの対が設定する動的部材の回転軸の両側に対称に設けられる。
【0040】
この改良された微細加工構造体の他の実施態様は静電安定性を強化するもので、規準部材と動的部材間にあって、捩り撓みヒンジに沿う一点で捩り撓みヒンジに1個にその一端が付属する付加体(アペンディジ)を備える。この付加体は捩り撓みヒンジから外側に突出し、規準部材に対して動的部材が軸中心に充分回転すると、付加体の突出端は規準部材と固定関係にある係止部に接するように成形してある。付加体の突出端が係止部に接すると、捩り撓みヒンジの捩りバネ常数が変化する。他の実施態様において、この改良された微細加工構造体は、規準部材にその第1の端部が、規準部材と動的部材間にあって、捩り撓みヒンジに沿う一点で捩り撓みヒンジの1個にその第2の端部が連結される係留体(テザ)を備える。規準部材に対して動的部材が軸中心に充分回転すると、係留体は捩り撓みヒンジの捩りバネ常数を変化する。更に他の静電付勢実施態様において、この改良された微細加工構造体は、規準部材に対して動的部材が軸中心になす角度回転に応答して信号を発生するようにした捩りセンサを備える。この捩りセンサが発生する信号は前記駆動手段にフィードバックされ、動的部材の回転を静電付勢する駆動信号を変更する。
【0041】
改良された捩り振動子は、電極と強化リムを備える動的部材間に静電的に印加されるトルクを、電極に直近接して両者間の電場を増強する強化リムの先端を鋭くすることにより増大する。他の改良された捩り振動子にあっては、捩り振動子のQを高めるため、動的部材内にあって、強化リムで囲まれる中空の第1の空洞が、基板に形成され、動的部材内に形成された第1の空洞に向かって開口する中空の第2の空洞に近接して設けられる。他の改良された捩りスキャナでは、規準部材と動的部材の何れかに、捩り撓みヒンジの一つに沿って配置されるスロットが形成される。スロットに跨って配設され、規準部材の近傍で隣接する捩り撓みヒンジに接する元帥材料が、捩り振動子のQを低減する。更に他の改良された捩り振動子は、動的部材と規準部材間の捩り撓みヒンジの両側に沿って補助駆動プレートを付加する。この補助駆動プレートは動的部材に近接する捩り撓みヒンジに連結され、回転軸に直角な方向の総合幅が動的部材の同直角方向の幅より小さい。この改良された捩り振動子にあっては、前記駆動手段はこれ等の補助駆動プレートとそれに近接して配置される電極に静電駆動信号を印加する。
【0042】
他の改良された捩り振動子では、捩り撓みヒンジは4:1を超える幅:厚み比(w:t)を有して、動的部材と規準部材間の熱伝導率を、捩りバネ常数が同等で、細く且つ薄い捩り撓みヒンジに比べて大きくする。捩り撓みヒンジの幅:厚み比を1:2を上回るように大きくすると、静電安定を改良する非線形の捩りバネ常数が得られる。他の改良された捩り振動子は動的部材と規準部材間の熱伝導率を、両者を同位体的に純粋な14Si28で製作することにより改良する。
【0043】
他の改良された捩り振動子では、動的部材のデカップル部をほぼ完全に取り囲む応力緩和カットを動的部材が備える。この応力緩和カットは、動的部材のそのデカップル部をその周囲部から支持するビームを形成し、応力がデカップル部をその周囲部間で結合が断たれるようにする。他の改良された捩りスキャナでは、動的部材の前側と後側に反射ミラー被膜が設けられ、動的部材に加わる応力をバランスさせる。他の改良された捩り振動子では、捩り撓みヒンジのすくなくとも1個が拡大部を有し、規準部材に対して動的部材が軸中心になす角回転に応答して信号を発生する捩りセンサをこの拡大部に設ける。
【0044】
光ビームをスイッチングするようにした他の改良された捩りスキャナでは、駆動手段は動的部材の軸中心回転を、初め電流パルスで電磁的に付勢する。動的部材が捩り撓みヒンジの設定する軸を中心としてなす回転を、電流パルスが衝撃的に開始させる。動的部材が予め設定された向きまで回転した後、駆動手段が動的部材を静電力でこの予備設定向きに保持する。
【0045】
他の改良された捩り振動子においては、動的部材が光検出器に近接してワイヤグリッド偏向子を保持し、光検出器に入して来る照明が光検出器に当たる前にワイヤグリッド偏向子を通るようにする。
【0046】
これ等及び他の特徴、目的及び利点は、以下、添付する図面を参照して記述される好ましい実施例の詳細な記載から、当業者に理解され、明らかになろう。
【0047】
【実施態様】
小型で性能の良い捩り振動子52
前記790特許に記載されているように、捩りスキャナ52のような捩り振動子のプレート58は複数の振動モードを示す。これ等の振動モードには、軸62を中心とする主捩り振動モード、垂直(縦)シェーキング振動モード、垂直(縦)ロッキング振動モード、横シェーキング振動モード及び横ロッキング振動モードが含まれる。プレート58のこれ等の振動モードの各々には、捩りスキャナ52の物理的特性により決定される振動周波数が有る。790特許に開示されているように、捩りスキャナ52の動作は主捩り振動モードの振動周波数がプレート58の他のどの振動モードの振動周波数より少なくとも20%低ければ、有意に良くなる。以下、詳細に述べるように、少なくとも3つのヒンジセグメントの端部同士を連結し、連結端が捩りバー54とプレート58間のヒンジに沿って位置付けられるようにすると、プレート58の種々の振動モードの振動周波数間の分離はより小さいフレーム56とプレート58でも改良される。ある種の適用例では、このように形成された折返しヒンジは、従来の折返しの無い形状を有する捩りバーのものよりかなり良いモードスペクトルを屡々示す。折返し捩りバー54の縦及び横振動モードの周波数が、主捩り振動モードの周波数から尚、離れることによる。
【0048】
図4aに示すように、一実施態様において、プレート58をフレーム56側から支持するT字状折返し捩り撓みヒンジ96は3つの基本ヒンジセグメント102a、102b及び102cから成る。各基本ヒンジセグメント102には、軸62に対して直角に向いていない縦軸98が有る。中央に位置する基本ヒンジセグメント102bでは、縦軸98は軸62と共直線である。折返し捩り撓みヒンジ96の中間部104が、基本ヒンジセグメント102a、102b及び102cの直隣接端106を相互に連結している。基本ヒンジセグメント102a、102b、102cと比較して、フレーム56、プレート58及び中間部104は不撓と見なせる程度まで充分厚く、大きく重い。プレートが速動又は振動しなければならない用途では、プレート58が軸62に関して対称に成形され、即ちプレート58の質量中心を軸62上に位置付けるのが好ましい。基本ヒンジセグメント102a及び102cは通常、同一形状に成形され、厚みが基本ヒンジセグメント102bと等しい。だが一般には、基本ヒンジセグメント102a及び102cは基本ヒンジセグメント102bの幅の半分(1/2)にするなどと、基本ヒンジセグメント102bより狭い。図4aに示す捩り撓みヒンジ96では、基本ヒンジセグメント102a及び102cが捻れ、曲がる間に、単に捻れるだけである。
【0049】
前記618特許に記載されているような、フレーム62に対してプレート58が軸62を中心にしてなす角度回転を測定する捩れセンサ108を、折返し捩り撓みヒンジ96の基本ヒンジセグメント102bが備えるようにしても良い。基本ヒンジセグメント102bに位置付けられる捩れセンサ108は、618特許に開示されたものと同一である。だが、折返し捩り撓みヒンジの特定の特性によっては、プレート58の回転に対する、基本ヒンジセグメント102bに位置付けられる捩れセンサ108の感度は、従来の折返しの無い捩りバー54に位置付けられる捩れセンサ108とは異なるものとなろう。
【0050】
図6aに示す折返し捩り撓みヒンジ96の捩り剛性は、幅と厚みが基本ヒンジセグメント102bのものと同程度で、長さが基本ヒンジセグメント102bと基本ヒンジセグメント102a及び102cの一方との総合長に等しい従来の折返しの無い捩りバー54の捩り剛性に近い。だが、図6aの図示から直ちに分かるように、中間部104を有する折返し捩り撓みヒンジ96の全長は、従来の折返しの無い捩りバー54のものの約半分(1/2)である。フレーム56に対するプレート58の回転中、基本ヒンジセグメント102bはほぼ純粋な捩れを経験する一方、基本ヒンジセグメント102a及び102cは捩れと曲げ応力の両方を経験する。基本ヒンジセグメント102a及び102cが充分近ければ、折返し捩り撓みヒンジ96を特定の捩りスキャナ52に構成するとき、曲げ応力は屡々無視し得るものとなる。
【0051】
長さが「1」である従来の折返しの無い捩りバー54と比較すると、折返し捩り撓みヒンジ96が示す縦剛性はより大きく、折返し捩り撓みヒンジ96の縦及び横振動モードの振動数は主捩り振動モードの振動数から更に離れている。基本ヒンジセグメント102bと対である両基本ヒンジセグメント102a及び102cは長さがが比較し得る従来の折返しの無い捩りバー54の半分(1/2)であるので、それ等の縦バネ常数は比較し得る、従来の折返しの無い捩りバー54の1/8に過ぎない。だが、中間部104が基本ヒンジセグメント102bと基本ヒンジセグメント102a及び102cを直列に連結しているから、折返し捩り撓みヒンジ96は剛性が比較し得る、従来の折返しの無い捩りバー54の4倍に過ぎない。比較し得る、従来の折返しの無い捩りバーと比較して、折返し捩り撓みヒンジ96の増大した縦剛性は縦振動モードの共振振動数を約2の因数、上昇する。折返し捩り撓みヒンジ96はまた、主捩り振動モードの振動数と横及びロッキング振動モードの振動数との分離を劇的にではないが、増大する。斯くして、折返し捩り撓みヒンジ96はプレート58の種々の振動モードの振動数間の分離を改良する。
【0052】
折返し捩り撓みヒンジ96のこれ等の改良された特性を、形状・構成が厳しく制限される捩りスキャナ52の微細製作に有利に用いることが出来る。例えば、選ばれた縦剛性に対して、捩り撓みヒンジ96をよりコンパクトにし、プレート58の角回転を増大するか、プレート58の回転が電磁的に付勢される場合、パワーの散逸を低減することが出来る。或いはまた、特定の撓性に対して、折返し捩り撓みヒンジ96は縦剛性を増大し、それにより捩りスキャナ52の耐衝撃性を増大する。斯くして、折返し捩り撓みヒンジ96は捩りスキャナ52の設計にに重要な利点を提供する。
【0053】
更に、捩り撓みヒンジ96が2つのセグメントにでなく、3つのセグメントに分割されることにより、その全長を更に低減し、その縦剛性を更に改良できる。従って、図4bに示された折返し捩り撓みヒンジ96は基本ヒンジセグメント102a、102b及び102cに、2つの補助ヒンジセグメント102d及び102eと共に、基本ヒンジセグメント102a及び102cの端部112を補助ヒンジセグメント102d及び102eの直隣接端112にそれぞれ連結する中間部104a及び104bとを付加している。ヒンジセグメント102a〜102eは通常長さが、比較し得る従来の折返しの無い捩りバー54の長さ「1」の1/3である。平面図では、中間部104a又は104bと基本ヒンジセグメント102a又はq102cはU字形に見える。比較し得る従来の折返しの無い捩りバー54と比較してヒンジセグメント102a〜102eの厚みが同じで、基本ヒンジセグメント102bの幅が同じで、基本ヒンジセグメント102a及び102cと補助ヒンジセグメント102d及び102eの幅が基本ヒンジセグメント102bの幅の約1/2であるとすれば、図4bに示す折返し捩り撓みヒンジ96は縦剛性が比較し得る従来の折返しの無い捩りバー54のものより約9倍、大きくなる。
【0054】
相対的回転のために連結される微細加工部材に関する種々の他の側面に係わる以下の記載全体を通して、そこに記載される従来の折返しの無い捩りバー54の代わりに、上記形式の折返し捩り撓みヒンジ96を用いることが出来る。更に、他のどのような捩り撓みヒンジであっても、プレート58がフレーム56に対して回転して、一対のかかるヒンジが設定する軸の周りに復元トルクを発生するように適切に構成され、且つフレーム56及びプレート58と共に、シリコン基板の無応力半導体層を用いて一体に製作されていれば、以下の記載全体で採用されている従来の折返しの無い捩りバー54の代わりに、用いることが出来る。
【0055】
プレート58の種々の振動モードの振動数は、捩りバー54の形状大きさを反映する。図5aに、矩形ビーム(梁、はり)の捩りバネ常数と矩形ビームの幅:厚み比(w:t)との間に存在する非線形関係を示す。幅:厚み比(w:t)が2:1を下回る従来の折返しの無い捩りバー54のような微細加工された矩形ビームでは、図5aのグラフが示すように、ビームの幅を1/2だけ小さくすると、捩りバネ常数は1/2以上小さくなる。図示のように、幅:厚み比(w:t)が2:1である捩りビームの幅を1/2だけ小さくすると、このビームの捩りバネ常数は因数3.0だけ小さくなる。
【0056】
図5bに、軸62の両側に対称に設けられた2つのビーム114が形成する無折返し2本つり捩りバー54を示す。各ビーム114は1:1の幅:厚み比(w:t)を有する。図5aに関し上述した理由で、図5bに示す無折返し二本つり捩りバー54が示す捩りバネ常数は、同一厚みで、組み合わせビームと同一の断面積を有する単一ビーム、即ち幅:厚み比(w:t)が2:1である単一ビームで形成される捩りバー54のものの約60%である。斯くして、図5bに示す無折返し二本つり捩りバー54は、主捩り振動モード振動数は、同等の、従来の単一ビーム無折返し捩りバー54のものの約75%である主捩り振動モード振動数を示すと共に、縦振動モードでは同一の振動数を示す。従って、どんな従来の無折返し捩りバー54でも、幅:厚み比(w:t)が3:1以下であれば通常、図5bに示したような同等の二本つり捩りバー54で有利に、且つ同一の縦剛性を保ちつつ、置き換えることができる。
【0057】
一般に、微細加工捩りバー54は厚みが全長に亘って均一である。この結果として、従来の無折返し捩りバー54では幅が高さを超えている。従って、従来の無折返し捩りバー54は一般に、横剛性がその縦剛性を上回り、対応して横振動モードの振動数が縦振動モードの振動数を上回ることになる。通常、捩りバーは縦及び横剛性が同一であることが、そのような形状大きさが捩りバー64の捩りバネ常数を低減できる場合に好ましい。ビームの幅:厚み比(w:t)が(1.0)より小さい場合、縦ではなく、横剛性が支配する。異なる幅:厚み比(w:t)のビームを、1以上のものも、1以下のものも含んで、組み合わせることにより、折返し捩りバー54の特性を有利に改良することが出来るようになる。
【0058】
図6aに、従来の無折返し捩りバー54を示す。捩りバー54は例えば、長さ「1」が400ミクロン、そして厚みが10ミクロン、幅が20ミクロン、即ち幅:厚み比(w:t)が2:1で良い。また、縦振動モードの振動数が主捩り振動モードの振動数より因数3だけ高いと仮定する。捩りバー54に対して2:1の幅:厚み比(w:t)に基づくと、横振動モードの振動数は主捩り振動モードの振動数より因数6、高くなる。
【0059】
図6bに、図4aに示したビームを用いる折返し捩りバー54の基本ヒンジセグメント102a及び102cの両者に対する適応例を示す。幅:厚み比(w:t)が、1:1以上及び以下を含んで異なる基本ヒンジセグメント102a、102b及び102cを適切に組み合わせることにより、捩りバー54の剛性を縦方向と横方向で適切に等しくすると共に、同時に折返し捩りバー54の全捩りバネ常数を低減することが可能になる。
【0060】
図6bに図示の構成では、基本ヒンジセグメント102a、102b及び102c捩りバー54は厚み10ミクロンである。だが、図6aに図示の従来の無折返し捩りバー54と比較して、二本つり基本ヒンジセグメント102a及び102cの各々を形成するビーム114は幅が基本ヒンジセグメント102bの幅、即ち20.0ミクロンの1/4に過ぎない5.0ミクロンである。また、ビーム114の長さは、図6aに示した従来の無折返し捩りバー54の長さ400.0ミクロンの1/3である135.0ミクロンとなる。図6bに示した折返し捩りバー54は、図6に示した従来の無折返し捩りバー54と実質的に等しい縦剛性を示す。だが、二本つり基本ヒンジセグメント102aおよび102cの極端に細いビーム114は幅:厚み比(w:t)が0.5:1.0であり、これは図5aに示すように、これ等ヒンジセグメントの捩りバネ常数を大幅に低下させると同時に、基本ヒンジセグメント102aおよび102cの横剛性と低減するものである。図6bに示した捩りバー54を最も簡単に理解するには、捩りバー54の幅広基本ヒンジセグメント102bが図6aに図示の従来の無折返し捩りバー54の横剛性を維持すると共に、二本つり基本ヒンジセグメント102aおよび102cが図6aに図示の捩りバー54の撓性にマッチした撓性を与えていることである。
【0061】
図6aに示す従来の無折返し捩りバー54と比較して、図6bに示す折返し捩りバー54の捩りバネ常数は22%低く、縦及び横振動モードの振動数は両方とも主捩り振動モードの振動数の8.2倍高い。斯くして、図6bに図示の捩りバー54は捩りスキャナ52に、主捩り振動モードの振動数と縦及び横振動モードの振動数との間の分離が図6aに図示の捩りバー54が示すものより大きい極めて改良されたモードスペクトルを与えるものである。図6aに示す捩りバー54の構成がもたらす利点を用いて、同一捩りバネ常数に対して捩りスキャナ52をより堅固にしたり、捩りスキャナに対して同一強度を保つと共に捩りバネ常数を低減することが出来る。斯くして、幅:厚み比(w:t)が1:1以上及び以下を含んで異なるビームを組み合わせることを、折返し捩りバー54の設計に有利に用いることが出来る。
【0062】
図7aに、L字形ビーム114の端部112をフレーム56及びプレート58とは独立して自由に撓ませるようにした二本つり捩りバー54も代替的構成例を示す。軸62の両側に対称に設けられているL字形ビーム114の端部112を自由にして上方又は下方に独立して曲がるようにすることにより、捩りバー54の捩りバネ常数が大きく低減されると共に、縦及び横方向の剛性が維持される。ビーム114の各々に、一軸応力に応答する曲がりセンサ116が備わるようにしても良い。これ等のビーム114の一軸応力は反対符号をもつから、曲がりセンサ116の発生する信号を有利に用いて、ノイズを除き、ビーム114内の一軸応力による信号を増大することが出来る。或いはまた、前記618特許に記載されているような捩りセンサ108をビーム114が備えるようにしても良い。
【0063】
図7bに、U字形ビーム114が軸62の両側に対称に設けられる、折返し捩りバー54の代替的実施態様を示す。図7bに示す捩りバー54の示す捩りバネ常数は、図7aに図示の捩りバー54のものより低い。図7bに図示のビーム114の構成では、ビーム114の端部112は上方又は下方に自由に曲がるようにしてある。
【0064】
或いはまた、図7aに示す捩りバー54の2つのL字形ビーム114を、従来の無折返しビーム114を中央に設け、図7cに示す三本つり捩りバー54を形成させることも出来る。図7cに図示の三本つり捩りバー54は、良好な縦剛性を提供する。L字形ビーム114は低捩りバネ係数を提供し、良好な横剛性を提供することにより中央の無折返しビーム114の特性を補う。
【0065】
上記の捩りバー54の折返し、二本つり及び三本つり構成の全部ではないとしても多くに対して、フレーム56とプレート58と捩りバー54間の関係は同等である。従って、図4a、4b、5b、6a、6b、7a及び7cに示した捩りバー54、フレーム56及びプレート58間の関係は逆になっても良い。
【0066】
動的部材回転の安定化
前記09289PCT公報に開示されているようにフレーム56とプレート58を連結して、軸62を中心とするプレート58の回転と共に捩りスキャナ52の捩りバネ常数を変えるようにした係留部86と比較して、以下に述べるように、付加体又は係留体を、プレート58自体に直接ではなく、プレート58を支持する捩りバー54の一方又は両方に付加体又は係留体を取り付ける方がずっと有利である。付加体又は係留体を捩りバー54の一方又は両方に取り付けることにより、軸62を中心とするプレート58の回転と共に、捩りバー54の長さを予め設定された角度に有効に短くし、かかる各角度において捩りスキャナ52の捩りバネ常数に顕著な変化を生じさせることが出来る。このようにして、捩りスキャナ52にマルチセグメント復元曲線を与え、ミラー面76を変形させずに捩りスキャナ52の静電的安定性を増大することが出来る。
【0067】
図3a中、線分94a及び94bで示したものと同様に高度に非線形な捩りバネ常数を示す静電付勢捩りスキャナ52を、図8a及び8bに図示のように製作することが出来る。これ等の図に示す捩りスキャナ52には、フレーム56とプレート58との間に捩りバー54に沿って位置する点で捩りバー54に取り付けられた一つ又は複数の付加体[appendages](アペンディジ)が備わる。各付加体122は、プレート58に軸62を中心とするトルクがまったく無いときには捩りスキャナ52のどの部分にも接触しない自由突出端124を有する。プレート58が軸を中心として充分な程度まで回転すると、各付加体122の突出端124はフレーム56又は絶縁性基板64上に位置付けられた係止部(ストップ)126に接触するか、絶縁性基板64に直接接触する。図8bに示すように、係止部126はプレート58の面の上方又は下方の何れに設けられても良い。
【0068】
アペンディジ122は捩りバー54と同じシリコン材料から成っても良く、捩りスキャナ52の製作中に捩りバー54と同時に形成されても良い。或いはまた、アペンディジ122は捩りスキャナ52の製作中、金属酸化物、窒化物の層等、捩りバー54に被覆される材料で形成されても良い。アペンディジ122及びストップ126の正確な詳細によっては、捩りスキャナ52は図8cに示された軸の両側で対称な捩りバネ常数、即ち軸62を中心とするプレート58の時計回り及び反時計回り回転に対して同一の捩りバネ常数を示す。
【0069】
アペンディジ122の突出端124がストップ126又は絶縁性基板64に係合すると、フレーム56からアペンディジ122の捩りバー54への取付点まで延びる捩りバー54の区分128に沿う捩りバー54の回転が妨げられる。区分128の更なる回転が妨げられると、プレート58を支持する捩りバネから区分128が事実上離され、捩りバー54は事実上短くなる。このようにして捩りバー54が動的に短小化されると、捩りバネ常数の勾配に急激な変化が生じる。静止位置からのプレート58の初期回転は妨げられることはないので、捩りスキャナ52に一つ又は複数のアペンディジ122が備わることにより、捩りスキャナ52の静電的安定性は増大する。アペンディジ122がプレート58にではなく、捩りバー54に取り付けるので、アペンディジ122がプレート58に課す拘束がミラー面76の平坦度を変えることはない。アペンディジ122は捩りバー54の一方或いは両方に属して良く、また異なる長さのアペンディジ122を用いて、図8aに示すように、捩りバー54に沿った複数の点で斯く属しても良い。
【0070】
図8cのグラフは図3aから写示する駆動トルク曲線92に対して、アペンディジ122の突出端124が先ずそれぞれのストップ126に係合する角度において復元トルク曲線132が急激に変化するマルチセグメント化復元トルク曲線132を示す。図8cのグラフから明らかなように、実証的復元トルク曲線132では、プレート58がフレーム56に対し軸62を中心としてなす、静電的に不安定な角度回転は存在しない。アペンディジ122を形成する材料の寸法の選択は、それぞれの突出端124がストップ126に係合した後、プレート58が引き続いて回転するのに伴い、アペンディジ122が僅かに撓むように選べば良い。アペンディジ122のそのような撓みにより、真っ直ぐではなく、曲がった区分を有し、異なる捩りバネ常数区分間の遷移が図8cに示したものより滑らかに変化する復元トルク曲線が得られる。
【0071】
光ファイバースイッチング等の捩りスキャナ52の多くのポインティング又はステアリング適用例においては、プレート58のミラー面76を反射して出る光ビーム74は長時間、例えば何時間、何日と同一方向に固定されたままでよい。かかる適用例では、ストップ126に対する突出端124のまれにしか起こらない衝撃は捩りスキャナ52の寿命又は信頼性に有害に影響することはない。
【0072】
プレート58が高速で回転しなければならない捩りスキャナ52に対しては、捩りスキャナ52に、捩りバー54の一方又は両方に図9a及び9bに示すように取り付けられる係留部[tether](テザ)142が備わるようにすることが出来る。係留部142にはコネクティングロッド(連桿)144が備わり、その各々は撓みロッド148a及びバネ146bによりバネ146を介してフレーム56に連結されている。図9bにより詳細に示すように、バネ146は波形起伏152のインバーテッド接続を用い、プレート58が軸62を中心として時計方向又は反時計方向に回転する間、波形起伏152は縮むようにしてある。インバーテッド接続波形起伏152を用いると、圧縮中にバネ146はその剛性を劇的に増大するようになる。
【0073】
バネ146の全部分は波形起伏152と撓みロッド148a及び148bを除いて、出来るだけ剛性を有するようにして、連桿144が動くとバネ146が撓むようにする。捩りバー54の回転に伴い、連桿144は動き、撓みロッド148a及び148bは引っ張られ、波形起伏152を圧縮し、この圧縮を波形起伏152が互いに接触し、そこでテザ142が本質的に非弾性になるまで続ける。波形起伏152が互いに接触すると、捩りバー54の区分128の回転が妨げられ、そこでテザ142は捩りバネ常数の値に急激な変化が生じせしめる。このようにして、図9a及び9bに示した捩りスキャナ52の復元トルク曲線を、図8aおよび8bに示した捩りスキャナ52に対して図8cに関し説明したようにマルチセグメント化することが出来る。更に、斯くテザ142で得られる復元トルク曲線における剛性化は、フレーム56に対するプレート58の時計回り方向及び反時計回り方向回転に付き、対称に生ずる。
【0074】
波形起伏152を極端に撓みやすくし、捩りバー54の捩りバネ常数が波形起伏152により、それが縮むまでは、殆ど影響されないようにする。波形起伏152が図9dに示すように、その圧縮を制限するストップ154を備えるようにしても良い。また、波形起伏152が非均一に成形され、波形起伏152の部分同士がバネ146内で接触してから、他の波形起伏152同士が接触するようにしても良い。圧縮バネ146の代わりに、テザ142は図9aに示すように引っ張りバネ156を捩りバー54に連結させて用いることも出来る。バネ146を用いると、波形起伏152が伸びるにつれ、その剛性が増大することから、捩りバネ常数の増大が結果として生ずる。
【0075】
スペース節約のため、バネ146の向きは捩り軸62に対してどのような角度でも良い。連桿144、バネ146又はバネ156、及び撓みロッド148a、148bは全て、シリコンから捩りスキャナ52の製作中に形成することが出来る。或いはまた、金属、ポリシリコン、窒化物、酸化物等製とし、捩りスキャナ52の製作中にシリコンウェーハの表面に付着させて形成しても良い。
【0076】
プレート58の回転を測定するため、図8a及び8b又は9a及び9bに示した捩りスキャナ52が前記618特許に記載のように捩りバー54の少なくとも一つに位置付けた捩りセンサ108を有する場合、捩りバー54の一つの、その回転がアペンディジ122又はテザ142の何れによっても妨げられることのない区域に捩りセンサ108は位置付けられる必要がある。だが、図8a及び8b又は9a及び9bに示した捩りスキャナ52が備える捩りセンサ108からの、プレート58の回転の各単位角度毎の出力信号は、復元トルク曲線132の各区分に沿って異なる。捩りセンサ108からのこの出力信号が異なるのは、捩りセンサ108を保持する捩りバー54の区域内の、プレート58の回転の各単位角度毎の応力が復元トルク曲線132の各区分に沿って異なるからである。
【0077】
非線形捩りバネ常数はまた、長さと比較して幅が極めて広い従来の無折返し捩りバー54を用いても得られる。多くの適用例において、捩りバー54の幅:厚み比(w:t)は一般に、5:1〜10:1である。だが、例えば1:2を超える比のように幅:厚み比(w:t)がずっと大きい場合、フレーム56からプレート58に延びる捩りバー54の縁部はプレート58が軸62を中心として回転すると、捻りと伸張の両方を示す。
【0078】
捩りスキャナ52の静電的不安定性を少なくとも部分的に軽減する他の方法には、静電駆動信号を発生する回路に、以下に述べるように回転センサからのフィードバックを供給するものがある。前記790特許に開示されているように、静電駆動信号を発生する回路に回転センサ信号をフィードバックすれば原理としては。捩りバー54に対するプレート58の回転の全角度に対して静電的不安定性が除去されるはずである。
【0079】
直線82である復元トルク曲線と曲がった駆動トルク曲線84a、84b及び84cを示す図2を参照して、静電的不安定性の問題を軽減するのに、駆動トルク曲線84a、84b及び84cを平坦化することが出来る。特定の捩りスキャナ52に対し、駆動トルク曲線84a、84b及び84cが図2に示したものと比べて平坦化されれば、プレート58の大きい角度に亘る制御回転も可能になる。有効駆動トルク曲線84a、84b及び84cを修正して平坦度を高めるため、電極66に印加される駆動電圧から、プレート58に対して検出される回転の適切な指数法則、パワー又はべき指数、例えばその2乗又は3乗にに比例する電圧を差し引くことが出来る。プレート58の回転を検出するため、捩りバー54に一体化された角度センサ、例えば前記618特許に記載の回転センサ、又はピエゾ抵抗ブリッジに基づく他の形式のセンサ、又は静電容量角度センサ等を用いることが出来る。
【0080】
図10aには、図1の捩りスキャナ52と共に、捩りスキャナ52内の電極66にそれぞれ印加される典型的な、従来の静電駆動信号を表すタイミング図が示されている。図10aのタイミング図が示すように、従来の静電駆動回路はプレート58と一方の電極66間に、好ましくはバイアス電圧V0に駆動電圧vが加わって成る駆動信号を印加している。また、[バイアス電圧V0−電圧v]がプレート58と他の電極66間に駆動信号として印加される。電極66及び66に対してそれぞれ電圧をを足し、差し引くと、プレート58と電極66及び66間の静電吸引力に不均衡が生じ、これがプレート58を軸62の周りに時計回り方向又は反時計回り方向に回転させる。プレート58と電極66,66間に印加される駆動信号において電圧Vの加算と減算を周期的に反転することにより、プレート58の準静的運動が得られる。
【0081】
図10bに図ロック図で示す回路は、図1の電極66に、図2の駆動トルク曲線84a、84b及び84cを平坦化することにより捩りスキャナ52の静電的安定性を高めるようにした駆動電圧を提供するものである。図10bのブロック図において、好ましくは捩りセンサ108である回転センサ162は、プレート58がフレーム56に対して軸62を中心としてなす角度回転に応答して出力信号aを発生する。この出力信号aをマルチプライヤ164が受け取り、入力aを矩形化して、出力信号a2を発生する。この矩形化出力信号a2を増幅器166が受け取り、それを一定因数Kで増幅する。増幅器166からの増幅出力信号Ka2と共に、プレート58への印加電圧vが次いで、単位利得加算増幅器166−及び168+に入力される。加算増幅器168−は増幅器166から受け取る出力信号Ka2を電圧vから差し引き、入力信号として斯く得られた差+v−Ka2[を加算増幅器172aに供給する。加算増幅器168+は増幅器166から受け取る出力信号Ka2を電圧vの負数に加算し、斯く得られた結果−v+Ka2を入力信号として加算増幅器172bに供給する。加算増幅器172a及び172bにはまた電圧V0が入力し、加算増幅器168−及び168+と加算増幅器172a及び172bからそれぞれ入力する信号に加算されて、かかる加算の結果、即ちV0+v−Ka2及びV0−v+Ka2をそれぞれの電極66に供給する。図10cのタイミング図は、図10bに示した回路により印加され得、静電的安定性を高める信号を示す。
【0082】
マルチプライヤ164は回転センサ162からの信号aを2以外のべき数、即ち3乗、4乗等に上げるように構成されても良い。anを得るために回転センサ162からの出力信号aに加えられるべき数nは、制御電圧vを低減して、駆動トルク曲線を適切に平坦化するように選ばれる。バイアス電圧V0も適宜選ばれる指数法則に従って、駆動トルク曲線の平坦度を更に増大するように定めることが出来る。一辺が1.5mmの静電付勢プレート58に対し、長さ150ミクロン、厚さ8ミクロン、幅12ミクロンの捩りバー54を用い、印加電圧V0=310V及び信号電圧v=300Vとして、更に図10に図示の駆動回路を用いると、図11に示す駆動トルク曲線はずっと平坦になる。駆動トルク曲線176は、マルチプライヤ164が回転センサ162からの出力信号aを矩形化するようにした図10bに図示の回路によりプレート58に印加されるトルクを示す。
図11の駆動トルク曲線178は、バイアス電圧V0も同じ角度フィードバックにかけられた図10bの回路によりプレート58に印加されるトルクを示す。駆動トルク曲線176で示される回路に対しては、安定領域は2°〜4°の改良があることが分かる。このようにして、駆動曲線の安定化と平坦度がすこぶる改良される。
【0083】
改良された駆動機構
直感的に、箱枠を一つが備え、一つが備えないようにして同様に成形されたプレート58に対して、電圧を電極に印加すると、箱枠を有するプレート58がより低いトルクを示すものと予想するのは、直感的に理のあるように見える。箱枠に取り囲まれたプレート58の中空中央部は他と比べて電極から遠いことから、その大部分は全トルクには殆ど寄与しないため、箱枠をもたないプレート58がより大きいトルクを示すと予測することも初めは矛盾のないもののように見える。だが、捩りスキャナ52等の捩り振動子に静電駆動場により印加されるトルクは、電極66に面する箱枠の先端を先鋭化することにより実質的に強化されることを理論的解析が確立している。更に、箱枠と対応する電極の形状大きさが適切であれば、この箱枠の鋭い先端から結果として生ずる強化静電場は静電的に得られるトルクを増大する。箱枠は通常、導電性シリコンから形成されので、箱枠が先鋭化されると、静電場が箱枠の先端に幾何学的に集中することから、プレート58と電極66間の吸引力は増大する。箱枠先端と、箱枠先端を先鋭化して強化される静電場は多くの場合、両者とも捩りバー54と、捩りバー54が設定する回転軸62から遠いプレート58の外周の周りに位置付けられるから、箱枠と対応する電極66の間の静電吸引力は最大大きさのトルクを発生する。斯くして、たとえプレート58と電極66間の静電相互作用の領域が少なくなっても、プレート58に静電的に印加されるトルクはプレート58と電極66の特定な幾何学的構では増大する。適切に設計された箱枠は、シリコンプレート58を適切に異方性エッチングすることにより用意に先鋭化が可能である。
【0084】
直線線分182a及び182bから成る図12aのカーブ182は、プレート58又はフレーム等の捩り振動子に、通常その外周の周りに備わる箱枠186強化リムの半分(1/2)の表面184を示す。図12aの部分断面図で示された箱枠186は:
1.電極66から160.0ミクロン離れて、グラフの水平軸上の0.0にあっ
て、グラフの縦軸に沿って位置付けられている。
2.捩りバー54の設定する軸62に平行なプレート58の周囲に沿って図12
aの面内外に出没する方向配向されている。
3.電極66に最近接する箱枠186の先端188で幅約90.0ミクロンであ
る。
4.箱枠186とプレート58の残部間の接合部で幅が約600.ミクロンであ
る。
図12aにおいて、カーブ192は箱枠186と平行に向いた楕円円筒の一部の面194を表し、カーブ182の上に有って、その特定の楕円円筒と箱枠186の面184の間に有る差の少なさをグラフで示している。破線196は、異方性エッチング後のシリコンの111結晶面を示す。
【0085】
図12aに示した楕円形状面194を用いて解析により得られた閉じた解を表す図12bは、電極66と箱枠186間に600Vの電位が印加されるとき、捩りバー54が設定する軸62を中心としてプレート58がなす回転によってフレーム56と電極66間に生じる間隔の変化に伴う、静電場の強さの電極66に直角な向きの成分を示す。電極66に平行に向く平らなプレート58と比較して、楕円形状面194を用いてなす計算は、電極66に近接して箱枠186の先端188が有るために、静電場が殆ど2(2.0)の因数、増大することを示している。従って、電極66と、箱枠186を含んだプレート58間の吸引力は、平坦面58と電極66間の吸引力より約4倍大きい。
【0086】
電極66と、箱枠186を含んだプレート58間の吸引力を理論的に解析すると、電極66と先端188間の平均間隔の0(0.0)〜3(3.0)倍である幅をセンタ188でもつ箱枠186は増大して静電吸引力を有することが分かる。先鋭化した箱枠186と電極66間で静電吸着力が増大しているから、そして箱枠186はプレート58の外周に位置しているから、軸62に直角な幅が1(1.0)であるプレート58では、箱枠186の単位長さ当たりのトルクは箱枠186の無いプレート58のものより約15%大きい。
【0087】
最大トルクを要するが、必ずしも最大Qを要しない適用例で電極66とプレート58間の吸引力を更に増大するには、電極66を図12c及び12dに示すように箱枠186の形状に合致するように成形すれば良い。先鋭化箱枠186に順応するように電極6を成形することにより、箱枠186の周りに電極が位置し、その発生する静電場が増大する。図12c及び12dにそれぞれ示す順応形状を成形するには、絶縁性基板64上に構造部材をメッキ成長させるか、シリコン材料の111結晶面を異方性エッチングすると良い。シリコンを異方性エッチングして所望の形状を創成するには、先ず箱枠186の傾斜側面に合致する電極66の部分をシリコン分離片にエッチングする。異方性で食刻されたシリコンを次いで、下に有る絶縁性基板64に固定し、先端188に近接して絶縁性基板64上に形成されている電極66の部分に電気的に接続する。また、順応電極66を得るのに、絶縁性基板64に対しスクリーン印刷するか、加工しても良い。プレート58と電極66間の電気火花発生する可能性を少なくするため、ポリイミド等の誘電性材料で電極66を被覆すると良い。
【0088】
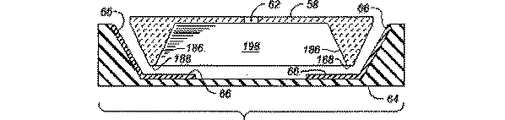
一般に、プレート58が回転すると、空気が絶縁性基板64を横切って側方に移動し、プレート58の両側で圧縮と希薄化が同時に起こる。直ちに分かるように、プレート58の供給するエネルギーが空気のかかる移動によって散逸される。中空の箱枠186は、かかるエネルギー損失を有意に低減し、それにより捩りスキャナ52等の捩り振動子により高いQを与える。高いQを必要とする捩りスキャナ52等の捩り振動子では、図13aに示すように箱枠186の中央部を中空にし、空洞198が形成されるべきである。また、空洞198は移動するプレート58と絶縁性基板64及び電極との間に実質的な開きをもつべきである。図13aに示す箱枠186の有るプレート58を図13bに示す中実のプレート58を比較すると、両者とも電極66から同様に離間しているが、図13aに示す中空プレート58の方が、特にスクイーズフィルム減衰[squeeze film damping]が低減することにより、図13bに示す中実のプレート58より少ない空気摩擦を示すことは明白である。空気摩擦による損失を更に低減するには、図13cに示すように空洞202を、それがプレート58に形成された空洞198に向いて開口するように、絶縁性基板64にも空けると良い。
【0089】
プレート58の平坦さが支配的でない適用例では、図13dに示すようにプレート58の薄い部分が捩りバー54と軸62から外側に、箱枠186の向こうまで延長するようにしても良い。同図に示すプレート58では、プレート58の外周に沿って位置付けられのではなく、寸法の小さい箱枠186が軸62から最遠のプレート58の外周と捩りバー54の間に位置付けられる。図13dに示す箱枠186では、箱枠186の先端188は、箱枠186がプレート58の外周を取り囲む場合と比べて、回転が少ない。プレート58の動きが少ないので、箱枠186と電極66間の間隔を小さくできると共に、それに跨って印加される駆動電圧を低下できる。プレート58を捩りバー54及び軸62から外側に向かって延長させることは、図13dに示した中実のプレート58でも用い得る。
【0090】
図13eに、軸62中心の回転を静電的に付勢するようにしたプレート58の他の実施態様構成例を示す。図13eに示す構成例では、トルクをプレート58に加えるのに最も有効な場所であるプレート58の外周に近接して電極66が配置されていない。本例では、捩りスキャナ52には補助駆動プレート212の複数の対を備え、各対が従来の無折返し捩りバー54に沿ってその両側に設けられている。プレート58は両者の間に有る捩りバー54に、プレート58に直隣接する捩りバー54の一端に連結されている。補助駆動プレート212の各対の、軸62に直角な方向の幅は、プレート58の、軸62に直角な方向の幅より有意に小さい。補助駆動プレート212の各対はプレート58より幅が狭いので、補助駆動プレート212とそれに近接して配置される複数の対の電極66との間の間隔は、電極66がプレート58の外周に近接して設けられる場合より有意に小さい。補助駆動プレート212の各々はそれに対応する電極66により近接して配置されるから、補助駆動プレート212と電極66の間に印加される電圧はより低くても良い。プレート58にトルクを印加する静電駆動電極66がプレート58に近接して配置されないから、プレート58の前側も後ろ側も光ビーム74を反射するミラー面76として機能することが出来る。捩りスキャナ52が単一光ビームのみを反射する必要が有るなら、電極66はプレート58の一面に近接して、一対の補助駆動プレート212か他対の補助駆動プレート212まで、軸62に平行に延長するもので良い。
【0091】
高熱伝導率捩りバー
プレート58からの熱の散逸(放散)を増大するため、プレート58をフレーム56内で支持するのに幅が広く、薄い(幅広薄厚)捩りバー54を用いることが出来る。幅広薄厚捩りバー54を用いると、同等の捩りバネ常数では、幅広薄厚捩りバー54は幅がより狭く、より厚い捩りバー54より大きな断面積と高い熱伝導率をもつから、プレート58からの熱放散を改良する。無折返し捩りバー54では、捩りバネ常数は厚みの3乗として増大し、捩りバー54の厚さに比例する。従って、バーの厚みが半分になり、幅が8倍になれっても、同一の捩りバネ常数が得られる。だが、幅広薄厚捩りバー54の断面積は4倍大きく、幅広薄厚捩りバー54の熱伝導率は対応して増大する。
【0092】
適用例の多くにおいて、微細加工捩りバー54は通常、2:1〜4:1の幅:厚み比(w:t)を有し、例えば幅が30.0ミクロンで、厚みが10.0ミクロンである。だが、捩りバー54の幅:厚み比(w:t)がずっと大きくなると、例えば4:1を超えると、プレート58とフレーム56間の熱伝導率は、同一の捩りバネ常数を有するより幅狭で、より厚い捩りバー54の2倍又は3倍になることが有る。
【0093】
前記790特許、553特許及び618特許に詳細に記載されているように、Simoxと云うSIO(シリコンオンインシュレータ)ボンド[bonded]シリコンウェーハ基板は、反射性プレート58に対して極めて平坦で無応力の膜を数ミクロンに過ぎない厚みでも可能に製作できることから、特に優先される出発材料である。図14に示すように、Simox又はボンドウェーハ222には、二酸化シリコンの電気絶縁性層224を備え、これが単結晶シリコン層226及び228を分離している。捩りスキャナ52の捩りバー54とプレート58はより薄いデバイスシリコン層226内に形成され、箱枠186等の捩りスキャナ52の他の部分はより厚いハンドルシリコン層228に裏側(裏面)エッチングにより形成される。中間の二酸化シリコンは裏面エッチングに対する完全なエッチ・ストップ(止め)を提供し、捩りバー54と均一な厚みのプレート58が出来る。
【0094】
捩りバー54の熱伝導率を改善するのに幾何学的技術を用いることが出来ることに加えて、プレート58又はフレーム56及びそれに付随する捩りバー54を純粋な同位元素(同位体)シリコン14Si28から構成することが出来る。同位元素レベルで純粋な14Si28は主シリコン同位元素であり、標準的同位元素レベルで純粋なシリコンより熱伝導率が50%高い。捩りバー54を介したプレート58とフレーム56間の熱伝導率を高めるため、プレート58と捩りバー54両方の材料を提供するボンドウェーハ222のデバイスシリコン層226が純粋な14Si28シリコンから成る。かかるボンドうぇーはでは、ハンドルシリコン層228も同位元素レベルで純粋なシリコンから形成することが出来る。捩りスキャナ52を製作するのにSimoxが用いられる場合、ウェーハ222全体を純粋同位元素14Si28シリコンで形成しなければならない。捩りバー54を同位元素的に純粋な14Si28シリコンで形成することにより、プレート58とフレーム56間の熱伝導率は増大し、プレート58の熱放散を高める。
【0095】
動的部材のQを調整
微細加工シリコン捩り振動子、特にプレート58が主捩り振動モードで前後に振動するものの適用例の多くにおいて、高いQ、例えば5000が捩りスキャナ52により示されることが極めて望ましい。だが、他の適応例、例えば捩りスキャナ52が有る向きまで回転し、その向きに或時間止まり、次いで他の向きまで比較的大きな角度で急速に回転し、そこで再び或時間止まるようにしたものでは、高いQが不利なことが有る。微細加工シリコン捩り振動子のかかる適用例では、プレート58が或向きから他の向きに回転した後、Qが高いと、プレート58はその新たな向きの辺りで、或る時間、前後に振動し、プレート58に貯められたエネルギーが散逸するまでこれが続く。
【0096】
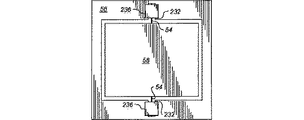
前記139特許に示された「蝶形状」フレーム又は「蝶形状」プレート58を、移動するプレート58又はフレームのQを制御するように適合させることが出来る。図15aに、従来のフレーム56が「蝶形状」プレート58を囲繞する、捩りスキャナ52の構成を示す。プレート58に形成され、プレート58にその「蝶形状」を与える長溝232が、プレート58をフレーム56内に支持する従来の細長い捩りバー54に沿って延びている。テープ等の粘着性材料で形成して良い減衰材料の小塊236がフレーム56の近傍で溝232の各々に跨ってい、プレート58を捩りバー54にゆるく連結する。フレーム56近傍の捩りバー54の端部はプレート58の動きに比べて殆ど動くことはないので、材料236をフレーム56近傍に配置することにより、プレート58が動くときは何時でも、相当な応力が材料236に掛かる。相当なストレスが減衰性材料236に掛かることにより、プレート58の動きに強い減衰が与えられる。だが、減衰材料236が捩りバー54につなぐ力はプレート58を変形させようとする。従って、プレート58の中央ミラー部242を応力緩和カット244でほぼ完全に囲繞するのが有利であろう。中央ミラー部242が応力緩和カット244でほぼ完全に囲繞され、中央ミラー部242が短いビーム246によりプレート58内に支持状態に保たれ、プレート58の囲繞部に有る応力を中央ミラー部242を応力緩和カット244から減結合し、ミラー面76の平坦度を確保する。
【0097】
図15bに示す捩りスキャナ52の代替的実施態様もまた、移動するプレート58又はフレームのQの制御に適応するものとしてある。同図の実施態様にあっては、溝232は捩りバー54に沿って、プレート58にではなく、フレーム56に形成されている。ここでも、各捩りバー54の本質的に動かない端部の近傍に材料236が溝232の各々に跨る。このように構成されて、プレート58が動くときは何時でも、捩りバー54の実質応力を緊張した減衰材料236がフレーム56に繋ぐ。図15bに示した実施態様では減衰材料236は捩りバー54の応力を、比較的薄く、曲がり易いプレート58にではなく、比較的厚く、堅いフレーム56に繋ぐから、応力緩和カット244とビーム246を省略することが出来る。
【0098】
減衰材料236を溝232と捩りバー54に跨って当てると、捩りバー54の剛性は少し変化する。だが、2(2.0)或いはそれさえ下回る程度までQの低下が得られる。前記139特許に示された「蝶形状」フレームに対しては、移動するジンバル環を固定された膜枠内に支持する、又は異動する中央のジンバル板をジンバル環内に支持する捩りバー54の一方又は両方に、図15a又は15bに図示の減衰材料を当てれば良い。折返し捩り二本つり又は三本つり捩りバー54、例えば図4a、4b、5b、6a、6b、7a、6b及び7cに示したものを用いる捩りスキャナ52に付いても、減衰材料236を用いてQを制御することが出来る
【0099】
捩りセンサが備わる強化捩りバー
捩り振動子の或種の適用例では、捩りバー54の幅が極めて狭いことが要求される。かかる幅の狭い捩りバー54では、前記618特許に詳細に記載されている捩りセンサ108のために捩りバー54上に提供される表面積は限られている。或いはまた、リード線や他の構造物が、捩りバー54上に表面積に対して、捩りセンサ108と競合する。
【0100】
図16aに示す幅の狭い捩りバー54にはフレーム56の近傍に拡大部252が有って、捩りセンサ108に対し、捩りバー54上にスペースを提供している。上記618特許により詳細に説明されているように、リード線256a及び256bを介して通電電極258a及び258bに接続する通電パッド254a及び254bを捩りセンサ108が備えることが好ましい。捩りセンサ108のレイアウトを容易にするため、通電電極258a及び254bは通常、捩りバー54の設定する軸62に対して直角方向に向いている。通電電極258a及び258bがこのように配向されて、パッド254a及び254bと通して捩りセンサ108に加わる電流は、通電電極258a及び258b間の捩りバー54を通して軸62に平行に流れる。出力電極262a及び262bの跨って現れる出力電圧は、拡大部252の面内の応力の変化に応答して変化する。捩りセンサ108の発生する出力電圧は、リード線264a及び264により出力パッド266a及び266bに運ばれる。パッド254a及び254b、リード線256a及び256b、リード線264a及び264b及び出力パッド266a及び266bは、捩りバー54及びフレーム56から電気的に絶縁されている。
【0101】
捩りセンサ108を拡張部252に位置付けることの一つの利点は、面が通常比較的広いフレーム56に捩りセンサ108に接続するリード線が直接通じることである。また、捩りセンサ108が比較的空間の広い拡張部252に位置付けられることにより、細線リソグラフィーの必要が少なくなるか、無くなる。同様に、幅の狭い捩りバー54に跨ってプレート58まで延びるリード線が有っても、捩りセンサ108が占める拡張部252の領域を巡って容易に通れる。
【0102】
だが、捩りセンサ108を拡張部252に設けると、フレーム56に対しプレート58が軸62を中心としてなす回転による捩りバー54内の剪断応力に対するその感度が低減する。それにも拘わらず、捩りセンサ108を備えた幅の狭い捩りバー54の他の可能な構成と比較して、拡張部252はからり有利であろう。捩りバー54がその厚みより狭ければ、即ち幅:厚み比(w:t)が1:1より小さければ、捩りセンサ108を保持する捩りバー54の面内の剪断応力は劇的に低下する。ここで、二本つり捩りバー54を用いる図16bに示すもののような、拡張部252に捩りセンサ108を設けたものでは、捩りバー54を構成する幅の狭いビーム114の一方又は両方に捩りセンサ108が設けられるものに比べて、高い剪断応力を実際に測定できる。更に、拡張部252の剪断応力が低いと、捩りバー54のその部分にある金属製リード線がプレート58の回転に起因する疲労を示す可能性が少なくなる。捩りセンサ108を保持するようにした拡張部252組み込みは、従来の無折返し、折返し、二本刷り又は三本つり捩りバー54を図16b、例えば図4a、4b、5b、6a、6b、7a、6b及び7cに示したもの等にも可能である。
【0103】
高反射率微細加工部材
微細可能ミラー面76を製作する際の重要な問題は、反射率の高い面を得るとと共に、このミラー面76を保持することである。ミラー面76の平坦度に関する問題は、捩りスキャナ52が広い温度範囲で動作しなければならない場合、大きくなる。これ等の必要条件を満たすミラー面76を無応力のプレート58内の応力を変えずに成形するには、上記の優先的ウェーハ222から捩りスキャナ52を微細加工するするのに、プレート58の前面と後面、即ちウェーハ222のデバイスシリコン層226同じか、これに平行に向いたプレート58の両側に、平衡(釣合)金属被膜を設けると良い。一般に、かかる被膜はプレート58を曲げる可能性を少なくするため、極めて薄くあるべきえある。
【0104】
このようにして、捩りスキャナ52のかかる適用例に対して高品質反射ミラー面76を形成するのに一般には、先ずプレート58を接着材料の薄い、例えば40600の薄さの層で被覆する。この接着層にクロム(Cr)を用いることができるが、特に薄いプレート58上の平坦ミラーに対しては、チタン(Ti)又はジルコニウム(Zn)が厚さ10.0〜100.0Åの応力がより低い接着層を形成するので好ましい。プレート58が接着層で被覆された後、プレート58は金の500〜800Åとより厚い反射金属層で被覆される。プレート58をこれ等の材料で被覆するのに、種々の方法を用いることが出来る。たとえ光りビーム74が図1に示すようにプレート58の一方の側からのみ反射すべき場合でも、一方の側が被覆されてミラー面76を生じさせた後にプレート上の応力が不均衡になる可能性を少なくするため、他の側にも同一条件で同一の被膜を付着させる。同一の複数被膜を付着させると共に、処理条件と環境を一定に保つことにより、プレート58の面上の応力が補償、平衡化され、これが反射ミラー面76を平坦なままに保持する。
【0105】
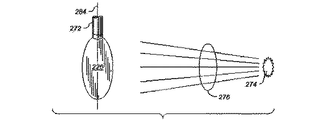
ミラー面76を形成する金属被膜は通常、真空蒸着装置、例えば金属の熱又は電子ビーム蒸着又は金属スパッターリングにより付けられる。或いはまた、ミラー面76を形成する金属被膜は、メッキでプレート58に付けても良い。図17aに概念的に示されているように金属がシリコンウェーハ上に従来の通り蒸着又はスパッターされる間、ウェーハ222をチャック272が保持して、金属ビーム276をウェーハ222にスプレーするソース274に面するウェーハ222がデバイスシリコン層226で被覆されるようにする。ソース274は必ずしも均一なビーム276を放出しないこともあるから、適格の半導体製品の歩留まりを増すため、ウェーハ222をデバイスシリコン層226の面でチャックが、図17aで曲がり矢印182で示されているように回転させ、ウェーハ222が均一に被覆されるようにしても良い。
【0106】
上記の従来の金属蒸着法やスパッタリング法を用いて平衡化金属被膜を、ウェーハ222に微細加工されたプレート58の前面と後面の両方に付けるには、2つのミラー面76がプレート58の両側に、前後して順次付着される必要がある。かかる2つのミラー面76の順次付着を行うと、プレート58の両側での被膜に微小な差が出来、プレート58上の応力に不均衡が生じる可能性が有る。
【0107】
図17bに、概念的であるが、プレート58の両側のこれ等の被膜がプレート58上の応力に不均衡を生じる可能性を少なくする、代替的金属蒸着又はスパッタリング法を示す。本例では、チャック272はウェーハ222をデバイスシリコン層226の面内で回転させるのではなく、ウェーハ222をデバイスシリコン層226に平行な軸284を中心として回転させる。軸284をして回転させると、ウェーハ222に微細加工されたプレート58はビーム276に曝される間、その前面と後面の間を交互する。このようにして、ミラー面76を提供する金属蒸着の部分がプレート58の両側に交互に付けられ、ついには被膜間の応力バランスを良くする全ミラー面76がプレート58の両側に形成されるようになる。デバイスシリコン層226に平行な軸284を中心としてウェーハ222を回転させるこの方法を、特にプレート58内の応力が変化してはならないとき、他の形式の被膜をプレート58上に付けるのに用いることが出来る。
【0108】
平坦で高品質のミラー面76を得るには、上記のように、真空蒸着、スパッタリング又はメッキにより同一材料をプレート58の両側に同時に付けるのがより好ましい。プレート58の両側を同時に同一材料で被覆できない場合には、プレート58の両側間を前後して交互する一連の部分被膜により、各層がプレート58上に段階的に形成されるようにする。プレート58の両側間を交互する部分被膜氏により層を形成することが実際的でない場合には、薄い接着層を先ずプレート58の一方側、次いで他方側に付けられるべきである。接着層が形成された後、反射層を先ずプレート58の一方側、次いで他方側に付ける。最後に、両層がプレート58の一方の側に、次いで他方の側に被覆されなければならない場合には、これ等の被膜は、全工程に通して処理条件と環境を一定に保ち、例えば、真空を切らずに。単一の連続工程にて付けられなければならない。
【0109】
反射プレート58に高品質ミラー面76を付与することに加えて、プレート58の適用例によっては、誘電性被膜を金属被膜に付着させ、ミラー面76の反射率をさせたり、ミラー面76からの反射光ビームの偏向を調整する等を要する場合も有る。殆どの例では、酸化物、窒化物等の無機材料を金属皮膜等の反射性材料に付着させることによって、ミラー面76の反射特性を特定の適用例に合わせている。かかる無機材料等の被膜は厚みが、プレート58に付与される反射性金属被膜より」ずっと厚い約0.1〜0.2ミクロンで有る必要があるから、光学的被膜がプレート58に与える応力は、特に厚みが数ミクロンに過ぎない被膜がしばしばプレート58に完全な応力バランスで付着されなければならないので、重要な問題である。
【0110】
ミラー面76の反射特性を合わせて、その反射率を大きくしたし、ミラー面76からの反射ビーム74の偏向を調整する等を要する適用例では、酸化物や窒化物等を付けるのではなく、相似誘電被膜として用いられるパリレンのオーバーコートを反射ミラー面76に付けるのが好ましい。パリレンは、極めて低い降伏応力を示す有機材料である。通常、パリレンは数Torrの真空システムにて室温で共形的に沈着する。ミラー面76の反射特性を適合させるため、屈折率が1.64で、膨張係数の低いC型パリレンが優先されるべきである。パリレンは光スペクトルの可視部で透明で、赤外部にさえ吸収バンドがある。図18に示すように、パリレンには、単一沈着工程中、捩りスキャナ52の金属被覆ミラー面76の両側に、厚みの等しい共形(相似)オーバーコート292を生じると云う特異な性質が有る。従って、パリレンがミラー面76をオーバーコートするとき、応力平衡化に望ましいものとしてプレート58の前面と後面に同一の皮膜を形成する。パリレンの特性のため、そのオーバーコートは従来の無機質皮膜よりずっと低い固有応力を示す。斯くして、プレート58のミラー面76上に0.1〜0.3ミクロンのパリレンをオーバーコートすることにより、プレート58を曲げることなく反射率が最適化された、光学的適応のミラーを製作することが出来る。
【0111】
図18aは、パリレン共形オーバーコート292の異なる厚みに対する、ミラー面76からの、それぞれS及びP偏光(分極)を有する、波長が0.659ミクロンの光の反射率を示す。図18bは、パリレン共形オーバーコート292の異なる厚みに対する、ミラー面76から反射されたP偏光(分極化)単色光の位相間の差を示す。図18bから明らかなように、ミラー面76で反射されたS及びP偏光単色光は、パリレン共形オーバーコート292が厚み約0.85ミクロンのとき、またそれが厚み約1.75ミクロンのとき、同相である。図18aが示すように、ミラー面76の反射率はパリレン共形オーバーコート292が厚み約0.85ミクロンのとき良くない一方、パリレン共形オーバーコート292が厚み約1.75ミクロンのとき、反射率は最大である。このように、図18a及び18bは、適切な厚みのパリレン共形オーバーコート292がミラー面76に付着されると、位相差の無いS及びPの両を偏光単色光を反射する高度に反射性の面が得られることを示している。
【0112】
急速可調整光学スイッチ
図19a及び19b平面図及び断面図は、光ビームスイッチング適用例に適合させた捩りスキャナ52を示す。プレート58はミラー面76を保持して、フレーム58は軸62を中心として捩りバー54により回転されるべくフレーム56内に支持されている。また、フレーム56はアクチュエータ部302を備え、外側フレーム304に対して第2の捩りバー306の対により回転されるように支持されている。図19a及び19bに示す捩りスキャナ52は前記790特許に記載されているもの如き2Dスキャナに似ているが、ミラープレート58の中心はフレーム56が中心として回転する、外側捩りバー306の設定する軸312上に位置付けられていない。光ビームスイッチング用とするこの捩りスキャナ52は寧ろ、プレート58全体を軸312の一方の側に位置付けている。
【0113】
スイッチングされる光ビーム74は、フレーム56のアクチュエータ部302が軸312を中心とする回転のために付勢されていないときプレート58と捩りバー54の有るウェーハ222のデバイスシリコン層226に平衡に伝搬する。アクチュエータ部302が付勢され、フレーム56が軸312を中心として、図19b中破線で示された位置まで回転すると、ミラー面76は光ビーム74の伝搬路内に移動し、それにより光ビーム74を異なる伝搬路に沿って反射する。
【0114】
軸312を中心とするフレーム56の回転は概念的には、アクチュエータ部302と電極66間に電圧を印加することにより静電的に付勢され得る。電極66は、捩りスキャナ52の製作中にウェーハ222内に創成された空洞内に嵌合するように成形されている電気絶縁性プラグ308に固定されている。プラグ308は電極66を、光ビーム74を捕らえるためにフレーム56が傾く角度と同様な角度で配向し、それにより電極66とアクチュエータ部302間の吸引静電力を最大化する。だが、フレーム56が軸312を中心として急速に回転しようとすれば、軸312の周りのその主捩り振動モードのための高い振動数を示さなければならない。フレーム56に対する高共振振動数を設定するため、高い捩りバネ常数を有する外側捩りバー306は、強いトルクアクチュエータ部302に印加して、フレーム56を先ず回転し、次いでそれを傾き向きに維持しなければならない。実際問題として、強い力をアクチュエータ部302に印加すると云う要求は、フレーム56をその静止位置からその傾き向きまで急速に回転させるために静電吸引力を用いることを殆ど排除するものである。軸312を中心とするフレーム56の回転が電磁的に付勢されると、外側捩りバー306の高い捩りバネ常数による抵抗に打ち勝つのに要する強い力の供給が可能になる。だが、フレーム56をその傾き向きに維持する要する大電流は、連続動作のためには望ましくない。
【0115】
図19a及び19bに示す捩りスキャナ52の一優先実施態様においては、回転を初め電磁的に付勢し、次いで電極66とアクチュエータ部302間に印加される静電吸引力は単にフレーム56を傾き向きに保持するために印加される。例えば、小型の永久磁石318をアクチュエータ部302の近傍に設け、大電流を受容するコイル322をアクチュエータ部302に保持させ、これ等を用いてウェーハ22の面から、軸312を中心とするフレーム56の回転を衝撃的に開始させる。数100mAの電流パルスを、予めプログラムされたプロファイルに従ってコイル322に印加することが出来る。或いはまた、外側捩りバー306の一方が捩りセンサ108を備え、電流パルスをサーボ制御してフレーム56の回転が予めプログラムされたプロファイルに追従するようにしても良い。フレーム56を所望の向きまで最速で回転させるため、プログラム方式又はサーボ方式の何れ絵かで制御される電流パルスをパルスの終了時付近で、その向きを反転させて回転を減速する。ウェーハ222に下に位置するプラスチック製支持板324に対してアクチュエータ部302が軟着地するように、フレーム56の回転はなされるべきである。即ち、零に近い速度でアクチュエータ部302が所望向きに近づくようにする。フレーム56のアクチュエータ部302が電極の近傍にまで回転した後は、回転後のアクチュエータ部302と電極66間の分離はごく僅かであるから、静電力を用いても、電力を散逸させることなく、アクチュエータ部302を容易に所望向きに保持できる。
【0116】
図19bに示すように構成された磁石318は、矢印325で示す方向に傾いた磁場を発生させ、コイル322の発生する磁場との磁気相互作用を最適化する。この利用可能な磁場が、アクチュエータ部302に及ぼし得る力の大きさ、従ってフレーム56の厚みと得られ得るスイッチング時間を決定する。最適の性能を得るため優先する磁石318は、Nb−B−Fe永久磁石材料又はプラスチック変種であろう。フレーム56の電磁付勢回転のための構造を利便的に組み立てるには、磁石318を、場合によっては保磁体326と共に、ウェーハ222を貫通する長穴324に挿入する。ウェーハ222の下に有るプラスチック支持板324には長穴324が備わり、磁石318の一部を、場合によっては保磁体326と共に受け止めるている。
【0117】
プレート58の向きを調整できるようにフレーム56には、軸312側から延びて来て、アクチュエータ部302から僅かに突出する可撓性ビーム338が少なくとも1つ、好ましくは2つ備わる。プレート58が回転して、図19bの破線で示す向きに至ると、ビーム338の先端が支持板324に接する。フレーム56と直隣接する電極66間に印加される電圧Vを調整することにより、両者間の吸引力がプレート58を所望の向きまで引っ張り、ビーム338は曲がる。或いはまた、小電流をコイル322に流すことにより、フレーム56の向きの調整もできる。この小電流から生じる磁気力が、電圧Vを一定に保つことにより得られる一定の静電力を補うか、これに逆らうようにする。外側捩りバー306の一方に捩りセンサ108を設け、これがフレーム56の向きを正確に測るための出力信号を発するようにする。
【0118】
図20a及び20bに示す代替的2例はフレーム56を45と90°角回転、又は任意に選ばれた角度にそれぞれ角回転した後、その所望向きに保持するものである。両例において、ウェーハ222は係止部(ストップ)342を備え、そこでフレーム56に備わるアクチュエータ部302の外周が来て係止するようになっている。電極66はストップ342に位置付けられ、ウェーハ222に取り付けられ、そして適当な絶縁体、例えば数ミクロンのポリイミドで被覆されている。電極66を絶縁体で被覆すると共に、フレーム56の外周と電極66間の密接触を広げることにより、電極66と回転されるフレーム56の外周との間に極めて強力な静電力が作られる。図20bに示す捩りスキャナ52の例では弓形に成形された磁石318が用いられ、フレーム56がその静止位置から90°回転してストップ342に接するまでの間、コイル322に実質的に平行な矢印235で表示の磁場を提供する。
【0119】
これまでの記載に限り、ストップ342とそこに位置付けられた電極66は比較的堅い。電極66を更に弾性材料層で被覆すれば、フレーム56と電極66に印加される電圧Vを変えることによりフレーム56の向きの微角度調整を行うことが可能になる。
【0120】
図20cは図19a及び19bに示したフレーム56の代替的実施態様であって、異なる伝搬経路に沿う光ビーム74をプレート58が反射する向きに静電力がフレーム56を固定した後、フレーム56の向きを調整する機構を備える例である。図20cに示す調整機構では、外側捩りバー306が外側フレーム304に連結するU字形部分サブフレーム352をフレーム56が備えている。外側捩りバー306に直隣接して位置付けられた一組の調整捩りバー354が、この部分的サブフレーム352をコイル322を保持するフレーム56の残部に連結している。
【0121】
フレーム56には溝356が有って、これがプレート58とコイル322を含んだフレーム56の大部分を部分的サブフレーム352から隔てている。斯くして、部分的サブフレーム352がストップ342に固定されているとき、プレート58とコイル322を含んだフレーム56の部分は部分的サブフレーム352とは独立して、調整捩りバー354が設定する軸358を中心として回転することが出来る。堅い調整捩りバー354はフレーム56を部分的サブフレーム352を除いて軸358の周りに回転させることができるから、コイル322に小電流を流すことにより、プレート58の向きを光ビーム74に対して調整することができる。斯くして、図20cに示した実施態様の捩りスキャナ52では、コイル322に電流が順次加えられる電流で、先ずフレーム56をその静止位置からその活動位置まで回転させるインパルスを生じさせ、次いでプレート58がその活動位置に有る間、プレート58の向きを調整するようにしている。
【0122】
調整捩りバー354に捩りセンサ108を備えさせ、フレーム56の向きの制御が追跡又はサーボ制御されるようにしても良い。上記のような電磁調整を用いて、フレーム56を軸358を中心として時計回り方向及び反時計回り方向の両方向に回転させるようにしても良い。捩りスキャナ52が一方向にのみ調整を要する場合、コイル322を保持するアクチュエータ部302の部分と図19b、20a及び20bに示した電極66とは別の直隣接する電極との間に静電力を印加して行うことも出来る。
【0123】
微細加工光学的処理素子
前記324特許に記載されているように、光検出器上に一組の導線を用いて、適切に配向するワイヤ格子偏光子を形成させることができる。この適用例に適した導線格子偏光子は、文献”Handbook of Optics”,Mc Graw Hill,copyright 1978,pp.10−72−10−77に記載されている。
ワイヤ格子偏光子は、格子を形成するワイヤの長さ方向に平行に電場が向いた光を遮断し、ワイヤと直角方向に電場が向く光を通す。上記324特許に開示されているように、シリコン光検出器対してワイヤ格子を適切な形状に配置することにより光検出器は偏光感応性となる。上記文献に記載されているように、ワイヤ格子を形成するワイヤの間隔は偏光光検出器に入射する光の波長に対して定められなければならない。
【0124】
図21に、ワイヤ格子偏光子362を保持する従来の捩りスキャナ52のプレート58を示す。ワイヤ格子偏光子362は、図21,21a又は22の何れにも単独には表示されいないがプレート58に形成されている光ダイオード上に配置されている。図22aにより詳細に示されているワイヤ格子偏光子362には、多数の平行ワイヤ364が備わる。ワイヤ364の各々は直隣接ワイヤ364から、プレート58に当たる光の波長の半分(1/2)を上回らない距離で離間している。特定の適用例で要する場合、ワイヤ格子偏光子362の占めるプレート58の部分をプレート58の他の部分から減結合するには、プレート58内に有る中央ミラー部242に付き図15aで示したものと同様に、ワイヤ格子偏光子362を応力緩和カット244で囲繞し、それをビーム246で支持すれば良い。
【0125】
前記790特許に開示されているように、捩りスキャナ52は光検出器を、好ましくはプレート58の外周に沿って位置付けて備え、反射光を監視するようにしても良い。図23aに示すように、光検出器372、例えば光りダイオードをフレーム56に組み込むこともできる。フレーム56内に有る光検出器372からの信号を適宜処理して、追跡又は他の目的に用いることができる。光検出器372を用いて、プレート58上のミラー面76から反射された走査(スキャニング)ビームで照らされている物体のエッジから散乱された光を感知することができる。図21、22a及び22bに示した捩りスキャナ52と同様に、ワイヤ格子偏光子362を光検出器372上に配置して、これ等の光検出器が偏光感応性になるうようにしても良い。
【0126】
プレート58は光検出器の代わりに及び/又はそれに加えて、他の光学の機構/装置/素子/機器/デバイスを保持しても良い。即ち、プレート58は回折格子、ビームスプリッター、ピンホール等、或いは図24a及び24bに示すように透過性又は反射性フレネルレンズ376を保持しても良い。図24bに示すように、同心(同軸)稜部378から成るフレネルレンズ376を、リアクティブイオンエッチング(RIE)を用いてプレート58内に形成する。図示のようにフレネルレンズ376は、シリコンが透過性の波長、例えば光に用いられる波長の光を透過する。稜部378を反射性層で被覆することにより、プレート58上の反応性フレネルレンズ376が出来る。上記のように、低応力ミラー面76をプレート58上の両側に付けることにより、フレネルレンズ376の形状はプレート58に初め形成された通りに保たれる。
【0127】
上記の構造体の製作はシリコン本体のウェーハ222、又はシリコンオンインシュレータ(SOI)層を備えたシリコン本体のウェーハで始まる。次いで、これ等2種のウェーハは、光リソグラフィー、種々の電気化学的又はプラズマエッチングプロセス及び適切なメッキ、付着、成長、及び適宜、ウェーハ上に金属、窒化物、酸化物、セラミック、ポリシリコン、非晶質シリコン、高分子及び他の所望の材料の適切にパターン化された層を作る微細加工技術を併用する周知の技術を用いて微細加工される。
【0128】
以上本発明を現在のところ好ましい実施例に付いて述べてきたが、かかる開示は純粋に例示的であり、限定的に解釈されるべきでないことが理解されるべきである。従って、発明の精神と範囲を逸脱せず、発明の種々の変更、集成及び/又は代替的用途が、以上の開示を読了した当業者に確実に示唆されよう。従って、以下に記載の請求項は、本発明の真の精神及び範囲に入る全ての変更、修正又は代替を包括するものと解釈されるよう意図するものである。
【図面の簡単な説明】
【図1】 ミラープレートを支持捩りバーが設定する軸の周りに回転させるためにトルクを静電的に印加するようにした、790特許に記載のような捩りスキャナの形式である従来の捩り振動子を示す立面断面図である。
【図2】 静電駆動トルクと捩りバー復元トルクを、図1に示すような捩り振動子であって、捩りバーの捩りバネ常数が一定である捩り振動子のプレート回転角の関数として示すグラフである。
【図3】 09289PCT公報の図3を再生する、従来技術の斜視図である。
【図3a】 静電駆動トルクと復元トルクを、図3に示すような捩り振動子であって、捩りバーの捩りバネ常数が変化する捩り振動子のプレート回転角の関数として示すグラフである。
【図4a、4b】 捩りセンサが一体となった折返し捩り撓みヒンジであって、よりコンパクトであり、且つ従来の折返しのない捩りバーのものと比較して改良された振動モードスペクトルを示す折返し捩り撓みヒンジを示す平面図である。
【図5a】 幅:厚み比の変化に対するビームの捩りバネ常数を示すグラフである。
【図5b】 改良された振動モードスペクトル特性を得るのに有利な図5aの捩りバネ常数を用いる折返しのない二本つり捩りバーの平面図である。
【図6a】 従来の折返しのない捩りバーを示す平面図である。
【図6b】 捩り撓みヒンジの性能を最適化するため、幅:厚み比が1:1より大きいものや小さいものを含んで種々に選ばれた捩りバーセグメントを備えることにより改良された特性を示す捩り撓みヒンジの平面図である。
【図7a、7b】 主として曲げに頼る二本つり捩り撓みヒンジがどのように極めて柔軟な回転をプレートに与えるかを示す平面図である。
【図7c】 図7aに示された二本つり捩り撓みヒンジと図6aに示された従来の折返しのない捩りバーとを組み合わせた三本つり捩り撓みヒンジの平面図である。
【図8a、8b】 捩りバーに自由動付加体を取り付けると共に係止部を用いて捩りバネ常数を急激に変化させ、それにより捩り振動子の静電安定性を増大させるものを示す、それぞれ平面図及び立面断面図である。
【図8c】 静電駆動トルクと捩りバー復元トルクを、図8a、8bに図示のような付加体とマルチセグメント捩りバネ常数を有する捩り振動子のプレート回転角の関数として示す、図2及び図3aのものに類似するグラフである。
【図9a、9b】 捩りバーをフレームに連結する係留部を用いて捩りバネ常数を急激に変化させ、それにより捩り振動子の静電安定性を増大させるものを示す、それぞれ平面図及び立面断面図である。
【図9c】 図9a、9bに示す係留部が備えることの出来る波形圧縮バネを詳細に示す平面図である。
【図9d】 図9cに示すバネの波形部が備えることの出来る係止部を示す断面図である。
【図10a】 捩りスキャナを示す立断面図、及びこの捩りスキャナに備わる電極にそれぞれ印加される静電準静的駆動信号を示すタイミング図である。
【図10b】 捩りセンサから受け取られる信号に応答して静電駆動信号を発生する回路であって、フレームに対するプレートの軸を中心とする回転に対し、準静的駆動信号を補償することにより静電安定性を改良する回路のブロック図である。
【図10c】 図10bに図示のような回路が発生し、図10aに図示の捩りスキャナの電極にそれぞれ印加される静電準静的駆動信号の、図10aに図示のものに類似するタイミング図である。
【図11】 静電駆動トルクと捩りバー復元トルクを、図8a、8bに図示のような捩り振動子に対して、プレイとの回転を図7に示す回路発生する駆動信号で静電的に付勢するときのプレート回転角関数として示す、図2、3a及び8cのものと類似するグラフである。
【図12a】 捩り振動子のプレート又はフレームに屡々組み込まれる箱枠強化リムの面と断面の半分と、面が箱枠強化リムの面に近似する楕円円筒一部を示すグラフである。
【図12b】 図12aに図示の箱枠と近接電極間の電場の水平(X軸)成分の、箱枠面に沿った電極からの距離を増大する大きさを示すグラフである。
【図12c、12d】 先鋭化した先端を有する箱枠を含む備える捩り振動子が示す静電吸着を更に高めるために用いることの出来る電極形状を示す断面図である。
【図13a、13b】 プレート回転のスクイーズフィルム減衰を低減する箱枠を有するプレートの形状大きさを示す断面図である。
【図13c】 プレート回転のスクイーズフィルム減衰がどのようにして更に低減され得るかを示す断面図である。
【図13d】 駆動電圧を低減できる箱枠及び上に掛かるミラー面を少なくした捩り振動子を示す断面図である。
【図13e】 捩りバーの縦方向の縁に沿って一体化されて、より低い駆動電圧を用い得るようにする駆動プレートを示す平面図である。
【図14】 捩り振動子、特に捩りスキャナの製作に用いられるシリコンウェーハ基板の好ましい形式を示す立面図である。
【図15a、15b】 高いQを減衰するようにした微細加工シリコン捩りスキャナのプレートとフレームの蝶形形状を示す平面図である。
【図16a、16b】 拡大部を有して、捩りセンサに捩りバー上の付加的表面部を与える捩りバーを示す平面図である。
【図17a、17b】 シリコンウェーハ基板に金属ミラー面を真空蒸着する異なる装置を示す斜視図である。
【図18】 プレートのミラー面がパリレンで適合被覆されて、プレートを曲げることなく、光学的性能を改良するほぼ応力のない層を設けるようにした捩りスキャナの断面図である。
【図18a、18b】 ミラー面を所定の厚さのパリレンで被覆することにより得られる性能の向上をそれぞれ示す。
【図19a、19b】 静電起動と電磁起動の両者を用いて、クランプ及び調整の両機構を備えた光ビームスイッチング用途用捩りスキャナのそれぞれ、平面図及び断面図である。
【図20a、20b】 捩りスキャナクランプ及び調整機構の代替的実施態様をを示す、図19aと同様な立断面図である。
【図20c】 図19aに示され、同図中、線20c−20cに沿って取られた捩りスキャナ用調整機構の平面図である。
【図21】 ワイヤグリッド偏向光検出器をプレート上に保持する捩り振動子の平面図である。
【図22a】 図21に示されたワイヤグリッド偏向光検出器の平面図である。
【図22b】 図21a中、線22b−22bに沿って取られたワイヤグリッド偏向光検出器の断面図である。
【図23】 規準部材、即ちフレームに光り検出器が位置付けられる捩り振動子の平面図である。
【図24a】 動的部材、即ちプレートにフレネルレンズが形成されて、これを保持する捩り振動子の平面図である。
【図24b】 図24a中、線24b−24bに沿って取られた、動的部材保持されるフレネルレンズの部分的断面図である。
【符号の説明】
52 捩りスキャナ
54 捩りバー
56 フレーム
58 プレート
62 軸
64 絶縁性基板
66 電極
72 膜窓
74 光ビーム
76 ミラー面
82 直線カーブ
84a 駆動トルク曲線
84b 駆動トルク曲線
84c 駆動トルク曲線
86 テザ(体)
92 駆動トルク曲線
94a 直線区分
94b 直線区分
96 捩り撓みヒンジ
102a 基本ヒンジセグメント
102b 基本ヒンジセグメント
102c 基本ヒンジセグメント
102 基本ヒンジセグメント
98 軸線
106 端部
108 捩りセンサ
102d 補助ヒンジセグメント
102e 補助ヒンジセグメント
104a 中間部
104b 中間部
112 端部
114 ビーム
116 曲がりセンサ
122 付加体(アペンディジ)
124 突出端
126 係止部(ストップ))
128 区分
132 復元トルク曲線
142 係留体(テザ)
144 コネクティングロッド
146 バネ
148a 可撓性ロッド
148b 可撓性ロッド
152 波形起伏
154 係止部(ストップ)
156 バネ
162 回転センサ
164 マルチプライヤ
166 増幅器
168− 加算増幅器
168+ 加算増幅器
172a 加算増幅器
172b 加算増幅器
176 駆動トルクカーブ
182 カーブ(曲線)
182a 直線区分
182b 直線区分
184 面
186 箱枠(ボックスフレーム)
188 先端
192 カーブ(曲線)
194 面
196 破線
198 空洞
202 空洞
212 補助駆動プレート
222 ウェーハ
224 二酸化シリコン
226 シリコン層(デバイスシリコン層)
228 シリコン層(ハンドルシリコン層)
232 溝(スロット)
236 材料
242 中央ミラー部
244 応力緩和(除去)カット
246 ビーム(はり、梁)
252 拡張部
254a パッド
154b パッド
256a リード(線)
256b リード(線)
258a 電流電極
258b 電流電極
262a 出力電極
262b 出力電極
264a リード(線)
264b リード(線)
266a 出力パッド
266b 出力パッド
272 チャック
274 ソース
276 ビーム
282 曲がり矢印
284 軸
292 コンフォーマル(共形)オーバーカット
302 アクチュエータ部
304 外側フレーム
306 外側捩りバー
312 軸
308 プラグ
318 磁石
322 コイル
324 支持板
325 矢印
326 保磁子
332 長穴
334 穴
338 ビーム
342 係止部(ストップ)
352 部分サブフレーム
354 トリミング(微調整)捩りバー
372 光検出器
376 フレネルレンズ
378 稜部(リッジ)
Claims (17)
- 一体化微細加工構造体であって、
所定の領域を有する基準部材(56)と、
該基準部材から突出し、且つ直径反対方向にあって、互いに対向する一対の捩り撓みヒンジ(96)であって、該捩り撓みヒンジの少なくとも一つが少なくとも3つの基本ヒンジセグメント(102a、102b、102c)と、該3つの基本ヒンジセグメントの第1の端部を互いに連結する中間部(104)とを有し、各基本ヒンジセグメントは軸線を有し、各基本ヒンジセグメントの第1の端部が捩り撓みヒンジの端部間に位置する、前記一対の捩り撓みヒンジと、
前記一対の捩り撓みヒンジにより上記基準部材に連結され、それにより該基準部材側から支持されて、該一対の捩り撓みヒンジが設定する軸を中心として回転する、所定の領域を有する動的部材(58)であって、且つ上記ヒンジセグメント軸線の何れとも向きが垂直でない動的部材とを備えると共に、
上記基準部材と一対の捩り撓みヒンジと動的部材とが、シリコン基板の応力無残留の半導体層を用いて一体化製造されており、
上記一対の捩り撓みヒンジの少なくとも一つが前記基準部材の前記所定の領域、又は前記基準部材及び前記動的部材の前記所定の領域に納まるように形成されていることを特徴とする一体化微細加工構造体。 - 前記基本ヒンジセグメントの軸線方向が前記一対の捩り撓みヒンジの設定する軸と平行であり、そのように形成された該捩り撓みヒンジを平面図で見ると、それがT字型に見える構成を特徴とする請求項1に記載の微細加工構造体。
- 前記基本ヒンジセグメントの一つの第2の端部が前記基準部材に連結し、且つ前記基本ヒンジセグメントの二つの第2の端部が前記動的部材に連結して成る構成を特徴とする請求項1に記載の微細加工構造体。
- 前記基本ヒンジセグメントの一つの第2の端部が前記動的部材に連結し、前記基本ヒンジセグメントの二つの第2の端部が前記基準部材に連結して成る構成を特徴とする請求項1に記載の微細加工構造体。
- 前記基本ヒンジセグメントの少なくとも一つが、捩りセンサ(108)を備える折返しのない捩りバーで形成されて成る構成を特徴とする請求項1に記載の微細加工構造体。
- 前記捩り撓みヒンジには更に少なくとも二つの補助ヒンジセグメント(102d、102e)と、該補助ヒンジセグメントの各々の第1の端部を基本ヒンジセグメントの一つの第2の端部に連結する第2の中間部(104b)とを有し、各補助ヒンジセグメントの軸線が前記動的部材の回転軸と向きが垂直でない構成を特徴とする請求項1に記載に記載の微細加工構造体。
- 前記基本ヒンジセグメントの軸線と前記補助ヒンジセグメントの軸線が、前記捩り撓みヒンジの対の設定する軸に平行に並び、斯く形成された捩り撓みヒンジを平面図で見ると、連結された基本ヒンジセグメントと補助ヒンジセグメントの各対がU字状に見える構成を特徴とする請求項6に記載の微細加工構造体。
- 前記補助ヒンジセグメントの何れにも連結されていない基本ヒンジセグメントの第2の端部が前記基準部材に連結し、補助ヒンジセグメントの第2の端部が前記動的部材に連結して成る構成を特徴とする請求項6に記載の微細加工構造体。
- 前記補助ヒンジセグメントの何れにも連結されていない基本ヒンジセグメントの第2の端部が前記動的部材に連結し、補助ヒンジセグメントの第2の端部が前記基準部材に連結して成る構成を特徴とする請求項6に記載の微細加工構造体。
- 前記補助ヒンジセグメントの少なくとも一つが二本つりビーム(114)である構成を特徴とする請求項6に記載の微細加工構造体。
- 前記基本ヒンジセグメントと前記補助ヒンジセグメントとが幅:厚み比(w:t)を異にする構成を特徴とする請求項6に記載の微細加工構造体。
- 前記基本ヒンジセグメントと前記補助ヒンジセグメントとが長さを異にする構成を特徴とする請求項6に記載の微細加工構造体。
- 前記基本ヒンジセグメントの少なくとも一つが二本つりビーム(114)である構成を特徴とする請求項1に記載の微細加工構造体。
- 前記基本ヒンジセグメントが幅:厚み比(w:t)を異にする構成を特徴とする請求項1に記載の微細加工構造体。
- 前記基本ヒンジセグメントが長さを異にする構成を特徴とする請求項1に記載の微細加工構造体。
- 一体化微細加工構造体であって、
所定の領域を有する基準部材(56)と、
該基準部材から突出し、且つ直径反対方向にあって、互いに対向する一対の捩り撓みヒンジ(96)であって、該捩り撓みヒンジの少なくとも一つが少なくとも3つの基本ヒンジセグメント(102a、102b、102c)と、該3つの基本ヒンジセグメントの第1の端部を互いに連結する中間部(104)とを有する、前記一対の捩り撓みヒンジと、
上記一つの捩り撓みヒンジにより上記基準部材に連結され、それにより該基準部材側から支持されて、該一対の捩り撓みヒンジが設定する軸を中心として回転する、所定の領域を有する動的部材(58)とを備え、
上記基準部材と一対の捩り撓みヒンジと動的部材とが、シリコン基板の応力無残留の半導体層を用いて一体化製造されており、更に
前記上記少なくとも3つの基本ヒンジセグメントのうちの1つに設けられ、動的部材が基準部材に対して軸中心になす角度回転に応答して信号を発生する回転センサ(108)と、
上記動的部材に近接して設けられた少なくとも一つの電極(66)と、
上記動的部材を捩り撓みヒンジの対が設定する軸を中心として回転させる静電駆動信号を動的部材と電極間に印加する駆動手段とを備えて成り、
上記一対の捩り撓みヒンジの少なくとも一つが前記基準部材の前記所定の領域、又は前記基準部材及び前記動的部材の前記所定の領域に納まるように形成されており、
該駆動手段が上記回転センサから信号を受信し、それに応答して上記駆動信号を変更して微細構造体の静電安定性を改良することを特徴とする微細加工構造体。 - 前記回転センサが、前記捩り撓みヒンジの一つに位置付けられた捩りセンサ(108)である構成を特徴とする請求項16に記載の微細加工構造体。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US9888198P | 1998-09-02 | 1998-09-02 | |
| US60/098,881 | 1998-09-02 | ||
| US14495399P | 1999-07-21 | 1999-07-21 | |
| US60/144,953 | 1999-07-21 | ||
| PCT/US1999/020218 WO2000013210A2 (en) | 1998-09-02 | 1999-09-02 | Micromachined members coupled for relative rotation by torsional flexure hinges |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010267138A Division JP5343062B2 (ja) | 1998-09-02 | 2010-11-30 | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002524271A JP2002524271A (ja) | 2002-08-06 |
| JP2002524271A5 JP2002524271A5 (ja) | 2006-12-28 |
| JP4776779B2 true JP4776779B2 (ja) | 2011-09-21 |
Family
ID=26795224
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000568104A Expired - Fee Related JP4776779B2 (ja) | 1998-09-02 | 1999-09-02 | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 |
| JP2010267138A Expired - Fee Related JP5343062B2 (ja) | 1998-09-02 | 2010-11-30 | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 |
| JP2013008267A Ceased JP2013099843A (ja) | 1998-09-02 | 2013-01-21 | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 |
| JP2014086619A Pending JP2014176964A (ja) | 1998-09-02 | 2014-04-18 | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010267138A Expired - Fee Related JP5343062B2 (ja) | 1998-09-02 | 2010-11-30 | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 |
| JP2013008267A Ceased JP2013099843A (ja) | 1998-09-02 | 2013-01-21 | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 |
| JP2014086619A Pending JP2014176964A (ja) | 1998-09-02 | 2014-04-18 | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6392220B1 (ja) |
| EP (1) | EP1119792A2 (ja) |
| JP (4) | JP4776779B2 (ja) |
| KR (1) | KR100620341B1 (ja) |
| CA (1) | CA2340192A1 (ja) |
| WO (1) | WO2000013210A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140073238A (ko) * | 2012-12-06 | 2014-06-16 | 엘지이노텍 주식회사 | 멤스 소자 및 흔들림 보정 장치 |
Families Citing this family (113)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1128440C (zh) * | 1998-09-18 | 2003-11-19 | 西加特技术有限责任公司 | 具有可拉伸回复力件的微加工反射器 |
| US6803755B2 (en) | 1999-09-21 | 2004-10-12 | Rockwell Automation Technologies, Inc. | Microelectromechanical system (MEMS) with improved beam suspension |
| US6636819B1 (en) * | 1999-10-05 | 2003-10-21 | L-3 Communications Corporation | Method for improving the performance of micromachined devices |
| US6545809B1 (en) | 1999-10-20 | 2003-04-08 | Flex Products, Inc. | Color shifting carbon-containing interference pigments |
| US6597826B1 (en) | 1999-11-02 | 2003-07-22 | Xros, Inc. | Optical cross-connect switching system with bridging, test access and redundancy |
| US6650803B1 (en) | 1999-11-02 | 2003-11-18 | Xros, Inc. | Method and apparatus for optical to electrical to optical conversion in an optical cross-connect switch |
| US6571030B1 (en) | 1999-11-02 | 2003-05-27 | Xros, Inc. | Optical cross-connect switching system |
| US6792174B1 (en) | 1999-11-02 | 2004-09-14 | Nortel Networks Limited | Method and apparatus for signaling between an optical cross-connect switch and attached network equipment |
| US6356689B1 (en) * | 2000-03-25 | 2002-03-12 | Lucent Technologies, Inc. | Article comprising an optical cavity |
| US6647164B1 (en) | 2000-10-31 | 2003-11-11 | 3M Innovative Properties Company | Gimbaled micro-mirror positionable by thermal actuators |
| US6711318B2 (en) | 2001-01-29 | 2004-03-23 | 3M Innovative Properties Company | Optical switch based on rotating vertical micro-mirror |
| US6527965B1 (en) | 2001-02-09 | 2003-03-04 | Nayna Networks, Inc. | Method for fabricating improved mirror arrays for physical separation |
| US6577427B1 (en) * | 2001-02-20 | 2003-06-10 | Nayna Networks, Inc. | Process for manufacturing mirror devices using semiconductor technology |
| JP2002258174A (ja) * | 2001-03-02 | 2002-09-11 | Seiko Epson Corp | 光変調装置及びそれを有する電子機器 |
| US6704475B2 (en) * | 2001-04-03 | 2004-03-09 | Agere Systems Inc. | Mirror for use with a micro-electro-mechanical system (MEMS) optical device and a method of manufacture therefor |
| US6618184B2 (en) * | 2001-04-03 | 2003-09-09 | Agere Systems Inc. | Device for use with a micro-electro-mechanical system (MEMS) optical device and a method of manufacture therefor |
| JP4102037B2 (ja) | 2001-04-26 | 2008-06-18 | 富士通株式会社 | マイクロミラー素子およびその製造方法 |
| US6529654B1 (en) | 2001-05-02 | 2003-03-04 | Nayna Networks, Inc. | Method for transparent switching and controlling optical signals using mirror designs |
| US6771851B1 (en) * | 2001-06-19 | 2004-08-03 | Nayna Networks | Fast switching method for a micro-mirror device for optical switching applications |
| US20040171226A1 (en) * | 2001-07-05 | 2004-09-02 | Burden Stephen J. | Isotopically pure silicon-on-insulator wafers and method of making same |
| US6867459B2 (en) * | 2001-07-05 | 2005-03-15 | Isonics Corporation | Isotopically pure silicon-on-insulator wafers and method of making same |
| US7119400B2 (en) * | 2001-07-05 | 2006-10-10 | Isonics Corporation | Isotopically pure silicon-on-insulator wafers and method of making same |
| US6477291B1 (en) | 2001-09-13 | 2002-11-05 | Nayna Networks, Inc. | Method and system for in-band connectivity for optical switching applications |
| US6813057B2 (en) | 2001-09-27 | 2004-11-02 | Memx, Inc. | Configurations for an optical crossconnect switch |
| US7088492B2 (en) * | 2001-10-11 | 2006-08-08 | Denso Corporation | Micro movable mechanism system and control method for the same |
| US6836353B1 (en) | 2001-11-20 | 2004-12-28 | Nayna Networks, Inc. | Redundant switch fabric methods and system for switching of telecommunication signals |
| US20040240034A1 (en) * | 2001-11-30 | 2004-12-02 | Scharf Bruce R. | Diffraction compensation using a patterned reflector |
| US7813634B2 (en) | 2005-02-28 | 2010-10-12 | Tessera MEMS Technologies, Inc. | Autofocus camera |
| US6935759B1 (en) * | 2002-02-19 | 2005-08-30 | Glimmerglass Networks, Inc. | Folded longitudinal torsional hinge for gimbaled MEMS mirror |
| US20040069742A1 (en) * | 2002-06-19 | 2004-04-15 | Pan Shaoher X. | Fabrication of a reflective spatial light modulator |
| US20030234994A1 (en) * | 2002-06-19 | 2003-12-25 | Pan Shaoher X. | Reflective spatial light modulator |
| JP4038208B2 (ja) * | 2002-06-21 | 2008-01-23 | 富士通株式会社 | マイクロミラーユニット及びその製造方法並びに該マイクロミラーユニットを用いた光スイッチ |
| JP2004039735A (ja) * | 2002-07-01 | 2004-02-05 | Fujitsu Ltd | 半導体基板及びその製造方法 |
| JP4307171B2 (ja) * | 2002-07-19 | 2009-08-05 | キヤノン株式会社 | マイクロ可動体 |
| KR100997929B1 (ko) * | 2002-08-03 | 2010-12-02 | 시베르타 인코퍼레이티드 | 밀봉된 일체식 멤스 스위치 |
| JP4003063B2 (ja) * | 2002-09-04 | 2007-11-07 | セイコーエプソン株式会社 | ミラーデバイス、光スイッチ、電子機器およびミラーデバイス駆動方法 |
| JP4025990B2 (ja) * | 2002-09-26 | 2007-12-26 | セイコーエプソン株式会社 | ミラーデバイス、光スイッチ、電子機器およびミラーデバイス駆動方法 |
| JP4042551B2 (ja) * | 2002-12-02 | 2008-02-06 | 株式会社ニコン | マイクロアクチュエータ装置及び光スイッチシステム |
| AU2003294436A1 (en) * | 2002-12-02 | 2004-06-23 | Institute For Scientific Research, Inc. | Isotopically enriched piezoelectric devices and method for making the same |
| US6844951B2 (en) * | 2002-12-23 | 2005-01-18 | Lexmark International, Inc. | Stationary coil oscillator scanning system |
| US6760145B1 (en) * | 2003-01-23 | 2004-07-06 | Corning Incorporated | Actuator for dual-axis rotation micromirror |
| JP3828501B2 (ja) * | 2003-03-18 | 2006-10-04 | 日本電信電話株式会社 | 光スイッチ装置 |
| US7095546B2 (en) * | 2003-04-24 | 2006-08-22 | Metconnex Canada Inc. | Micro-electro-mechanical-system two dimensional mirror with articulated suspension structures for high fill factor arrays |
| JP3906825B2 (ja) | 2003-06-17 | 2007-04-18 | 日本電気株式会社 | 計算機システム、計算機システム起動方法およびプログラム |
| US20070067953A1 (en) * | 2003-10-21 | 2007-03-29 | Koninklijke Philips Electronics N.V. | Monolithic structure with at least one elastic hinge |
| JP4396299B2 (ja) * | 2004-02-09 | 2010-01-13 | 日立金属株式会社 | ミラーシステム及び光スイッチ |
| US7482730B2 (en) * | 2004-02-09 | 2009-01-27 | Microvision, Inc. | High performance MEMS scanner |
| WO2005099410A2 (en) * | 2004-04-12 | 2005-10-27 | Siverta, Inc. | Single-pole, double-throw mems switch |
| US7442918B2 (en) * | 2004-05-14 | 2008-10-28 | Microvision, Inc. | MEMS device having simplified drive |
| TWI247148B (en) * | 2004-05-28 | 2006-01-11 | Ind Tech Res Inst | Electrostatic movable micro-mirror chip |
| TWI235735B (en) * | 2004-06-18 | 2005-07-11 | Walsin Lihwa Corp | Two-axis element and manufacturing method thereof |
| US7623142B2 (en) * | 2004-09-14 | 2009-11-24 | Hewlett-Packard Development Company, L.P. | Flexure |
| JP4694196B2 (ja) * | 2004-12-28 | 2011-06-08 | オリンパス株式会社 | 光偏向器 |
| JP2006195083A (ja) | 2005-01-12 | 2006-07-27 | Sharp Corp | 光走査装置 |
| JP2006214743A (ja) * | 2005-02-01 | 2006-08-17 | Matsushita Electric Works Ltd | 半導体加速度センサ |
| US7636101B2 (en) | 2005-02-09 | 2009-12-22 | Microvision, Inc. | MEMS scanner adapted to a laser printer |
| US7432629B2 (en) * | 2005-02-16 | 2008-10-07 | Jds Uniphase Corporation | Articulated MEMs structures |
| US7359131B1 (en) * | 2005-02-28 | 2008-04-15 | Siimpel Corporation | Lens positioning systems and methods |
| US20070014512A1 (en) * | 2005-07-05 | 2007-01-18 | Texas Instruments Incorporated | Torsional hinged MEMS device |
| US7472596B1 (en) * | 2005-07-26 | 2009-01-06 | Donato Cardarelli | GRA MEMS accelerometer |
| US7528933B2 (en) * | 2006-04-06 | 2009-05-05 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method utilizing a MEMS mirror with large deflection using a non-linear spring arrangement |
| US8726730B1 (en) * | 2011-12-14 | 2014-05-20 | Sandia Corporation | Optically transduced MEMS gyro device |
| US8117915B1 (en) * | 2006-07-26 | 2012-02-21 | Milli Sensor Systems + Actuators, Inc. | GRA MEMS accelerometer |
| US9079762B2 (en) * | 2006-09-22 | 2015-07-14 | Ethicon Endo-Surgery, Inc. | Micro-electromechanical device |
| US7713265B2 (en) | 2006-12-22 | 2010-05-11 | Ethicon Endo-Surgery, Inc. | Apparatus and method for medically treating a tattoo |
| US8273015B2 (en) | 2007-01-09 | 2012-09-25 | Ethicon Endo-Surgery, Inc. | Methods for imaging the anatomy with an anatomically secured scanner assembly |
| US8801606B2 (en) | 2007-01-09 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Method of in vivo monitoring using an imaging system including scanned beam imaging unit |
| KR100868759B1 (ko) * | 2007-01-25 | 2008-11-17 | 삼성전기주식회사 | 멤스 디바이스 및 이의 제조방법 |
| JP4873560B2 (ja) * | 2007-02-08 | 2012-02-08 | 株式会社リコー | 光走査装置 |
| US8216214B2 (en) | 2007-03-12 | 2012-07-10 | Ethicon Endo-Surgery, Inc. | Power modulation of a scanning beam for imaging, therapy, and/or diagnosis |
| EP1972909A1 (en) * | 2007-03-23 | 2008-09-24 | Koninklijke Philips Electronics N.V. | Luminescence sensor |
| US8626271B2 (en) | 2007-04-13 | 2014-01-07 | Ethicon Endo-Surgery, Inc. | System and method using fluorescence to examine within a patient's anatomy |
| US7995045B2 (en) | 2007-04-13 | 2011-08-09 | Ethicon Endo-Surgery, Inc. | Combined SBI and conventional image processor |
| US8160678B2 (en) | 2007-06-18 | 2012-04-17 | Ethicon Endo-Surgery, Inc. | Methods and devices for repairing damaged or diseased tissue using a scanning beam assembly |
| US7558455B2 (en) | 2007-06-29 | 2009-07-07 | Ethicon Endo-Surgery, Inc | Receiver aperture broadening for scanned beam imaging |
| US7982776B2 (en) | 2007-07-13 | 2011-07-19 | Ethicon Endo-Surgery, Inc. | SBI motion artifact removal apparatus and method |
| US9125552B2 (en) | 2007-07-31 | 2015-09-08 | Ethicon Endo-Surgery, Inc. | Optical scanning module and means for attaching the module to medical instruments for introducing the module into the anatomy |
| US7983739B2 (en) | 2007-08-27 | 2011-07-19 | Ethicon Endo-Surgery, Inc. | Position tracking and control for a scanning assembly |
| US7925333B2 (en) | 2007-08-28 | 2011-04-12 | Ethicon Endo-Surgery, Inc. | Medical device including scanned beam unit with operational control features |
| US8050520B2 (en) | 2008-03-27 | 2011-11-01 | Ethicon Endo-Surgery, Inc. | Method for creating a pixel image from sampled data of a scanned beam imager |
| JP5082983B2 (ja) * | 2008-03-28 | 2012-11-28 | 富士通株式会社 | 光スイッチ及び光スイッチの制御方法、memsデバイスの制御方法 |
| US8332014B2 (en) | 2008-04-25 | 2012-12-11 | Ethicon Endo-Surgery, Inc. | Scanned beam device and method using same which measures the reflectance of patient tissue |
| US8499629B2 (en) * | 2008-10-10 | 2013-08-06 | Honeywell International Inc. | Mounting system for torsional suspension of a MEMS device |
| US8418556B2 (en) * | 2010-02-10 | 2013-04-16 | Robert Bosch Gmbh | Micro electrical mechanical magnetic field sensor utilizing modified inertial elements |
| US8018229B1 (en) | 2010-04-22 | 2011-09-13 | Honeywell International Inc. | Structure and method for flex circuit on a chip |
| KR101239218B1 (ko) | 2010-05-13 | 2013-03-05 | 서울대학교산학협력단 | 양방향 안정성을 가지는 능동지능형 구조체 |
| DE102010029074B4 (de) * | 2010-05-18 | 2018-03-08 | Robert Bosch Gmbh | Anbindungsstruktur für Mikroschwingeneinrichtungen |
| JP5842467B2 (ja) * | 2010-11-16 | 2016-01-13 | 株式会社リコー | アクチュエータ装置、このアクチュエータ装置用の保護カバー、このアクチュエータの製造方法、このアクチュエータ装置を用いた光偏向装置、二次元光走査装置及びこれを用いた画像投影装置 |
| JP2012247372A (ja) * | 2011-05-30 | 2012-12-13 | Nippon Mektron Ltd | 圧力センサ及びその製造方法並びに圧力検出モジュール |
| WO2012170850A2 (en) * | 2011-06-09 | 2012-12-13 | Cymatics Laboratories Corp. | Mems devices made with isotopic materials |
| NL2007554C2 (en) * | 2011-10-10 | 2013-04-11 | Innoluce B V | Mems scanning micromirror. |
| FR2983844B1 (fr) | 2011-12-12 | 2014-08-08 | Commissariat Energie Atomique | Liaison mecanique formant pivot pour structures mecaniques mems et nems |
| US8783106B1 (en) | 2011-12-13 | 2014-07-22 | Sandia Corporation | Micromachined force-balance feedback accelerometer with optical displacement detection |
| JP5860066B2 (ja) * | 2012-01-24 | 2016-02-16 | パイオニア株式会社 | アクチュエータ |
| WO2014063737A1 (en) * | 2012-10-25 | 2014-05-01 | Lemoptix Sa | A mems device |
| TWI497079B (zh) * | 2013-09-10 | 2015-08-21 | Globalmems Co Ltd | 具有耐摔保護功能的可動裝置 |
| TWI580632B (zh) * | 2014-03-14 | 2017-05-01 | 財團法人工業技術研究院 | 具用於旋轉元件之摺疊彈簧的微機電裝置 |
| DE102015103164B4 (de) | 2015-03-04 | 2022-10-20 | Carl Zeiss Microscopy Gmbh | Scanvorrichtung mit wenigstens einer eindimensional scannenden Scaneinheit |
| DE102015209030B4 (de) | 2015-05-18 | 2023-06-07 | Robert Bosch Gmbh | Mikromechanische Vorrichtung und Verfahren zum Herstellen einer mikromechanischen Vorrichtung |
| JP2017040700A (ja) * | 2015-08-18 | 2017-02-23 | セイコーエプソン株式会社 | 光スキャナー、画像表示装置およびヘッドマウントディスプレイ |
| JP6834201B2 (ja) * | 2016-07-06 | 2021-02-24 | 住友電気工業株式会社 | Memsミラー駆動回路 |
| US10268037B2 (en) | 2017-04-27 | 2019-04-23 | Google Llc | Interdigitating vertical dampers for MEMS-based actuators |
| JP6524367B1 (ja) | 2017-07-06 | 2019-06-05 | 浜松ホトニクス株式会社 | 光学デバイス |
| JP7112876B2 (ja) | 2017-07-06 | 2022-08-04 | 浜松ホトニクス株式会社 | 光学デバイス |
| CN110799883B (zh) | 2017-07-06 | 2022-04-12 | 浜松光子学株式会社 | 光学装置 |
| US11733509B2 (en) | 2017-07-06 | 2023-08-22 | Hamamatsu Photonics K.K. | Optical device |
| CN115657296A (zh) | 2017-11-15 | 2023-01-31 | 浜松光子学株式会社 | 光学器件的制造方法 |
| JP6585147B2 (ja) | 2017-12-01 | 2019-10-02 | 浜松ホトニクス株式会社 | アクチュエータ装置 |
| JP6546370B1 (ja) * | 2017-12-01 | 2019-07-17 | 浜松ホトニクス株式会社 | アクチュエータ装置 |
| JP7181448B2 (ja) * | 2018-03-30 | 2022-12-01 | ミツミ電機株式会社 | アクチュエータ及び光走査装置 |
| FR3094709B1 (fr) * | 2019-04-08 | 2022-10-07 | Commissariat Energie Atomique | Charniere offrant une sensibilite aux contraintes internes reduite |
| FR3094708B1 (fr) * | 2019-04-08 | 2022-12-02 | Commissariat Energie Atomique | Charniere hors-plan pour structure micromecanique et/ou nanomecanique a sensibilite aux contraintes internes reduite |
| US11408911B2 (en) * | 2019-07-17 | 2022-08-09 | Honeywell International Inc. | Optomechanical structure with corrugated edge |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57183515A (en) * | 1981-05-07 | 1982-11-11 | Nissan Motor Co Ltd | Fuel-injected engine |
| JPH04211218A (ja) * | 1990-01-18 | 1992-08-03 | Fuji Electric Co Ltd | ねじり振動子およびその応用素子 |
| JPH05251805A (ja) * | 1991-10-30 | 1993-09-28 | Hans Steinbichler | 超小形機械式変換器 |
| JPH06109561A (ja) * | 1992-09-29 | 1994-04-19 | Ricoh Co Ltd | 力検出装置 |
| JPH06180428A (ja) * | 1992-12-15 | 1994-06-28 | Matsushita Electric Ind Co Ltd | 静電力駆動小型光スキャナ |
| JPH07322649A (ja) * | 1994-05-24 | 1995-12-08 | Matsushita Electric Ind Co Ltd | マイクロアクチュエータ装置及びその製造方法 |
| JPH0996768A (ja) * | 1995-09-29 | 1997-04-08 | Omron Corp | 光偏向装置 |
| JPH09159938A (ja) * | 1995-12-11 | 1997-06-20 | Fuji Electric Co Ltd | マイクロミラー装置 |
| JPH1068896A (ja) * | 1996-07-19 | 1998-03-10 | Texas Instr Inc <Ti> | マイクロ・メカニカル・デバイスのためのノン・リニア・ヒンジ |
Family Cites Families (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4317611A (en) | 1980-05-19 | 1982-03-02 | International Business Machines Corporation | Optical ray deflection apparatus |
| JPS644091Y2 (ja) * | 1981-05-18 | 1989-02-02 | ||
| US4468282A (en) | 1982-11-22 | 1984-08-28 | Hewlett-Packard Company | Method of making an electron beam window |
| US4598585A (en) | 1984-03-19 | 1986-07-08 | The Charles Stark Draper Laboratory, Inc. | Planar inertial sensor |
| US4699006A (en) | 1984-03-19 | 1987-10-13 | The Charles Stark Draper Laboratory, Inc. | Vibratory digital integrating accelerometer |
| US4732440A (en) | 1985-10-22 | 1988-03-22 | Gadhok Jagmohan S | Self resonant scanning device |
| US4670092A (en) | 1986-04-18 | 1987-06-02 | Rockwell International Corporation | Method of fabricating a cantilever beam for a monolithic accelerometer |
| JPS6341080A (ja) | 1986-08-06 | 1988-02-22 | Nissan Motor Co Ltd | 半導体加速度センサ |
| GB8707854D0 (en) * | 1987-04-02 | 1987-05-07 | British Telecomm | Radiation deflector assembly |
| US5111693A (en) | 1988-01-13 | 1992-05-12 | The Charles Stark Draper Laboratory, Inc. | Motion restraints for micromechanical devices |
| US5016072A (en) | 1988-01-13 | 1991-05-14 | The Charles Stark Draper Laboratory, Inc. | Semiconductor chip gyroscopic transducer |
| GB2215840B (en) | 1988-03-26 | 1992-01-08 | Stc Plc | Transducer |
| US5473945A (en) * | 1990-02-14 | 1995-12-12 | The Charles Stark Draper Laboratory, Inc. | Micromechanical angular accelerometer with auxiliary linear accelerometer |
| JPH04211217A (ja) * | 1990-02-19 | 1992-08-03 | Fuji Electric Co Ltd | 光偏向子 |
| JPH0413975A (ja) | 1990-05-07 | 1992-01-17 | Nec Corp | 半導体加速度センサ |
| US5605598A (en) * | 1990-10-17 | 1997-02-25 | The Charles Stark Draper Laboratory Inc. | Monolithic micromechanical vibrating beam accelerometer with trimmable resonant frequency |
| JP2852368B2 (ja) * | 1991-02-05 | 1999-02-03 | キヤノン株式会社 | トラッキング用回動ミラー装置 |
| JPH04287475A (ja) * | 1991-03-18 | 1992-10-13 | Fujitsu Ltd | 共振型スキャナ |
| US5203208A (en) | 1991-04-29 | 1993-04-20 | The Charles Stark Draper Laboratory | Symmetrical micromechanical gyroscope |
| US5331852A (en) | 1991-09-11 | 1994-07-26 | The Charles Stark Draper Laboratory, Inc. | Electromagnetic rebalanced micromechanical transducer |
| US5635639A (en) * | 1991-09-11 | 1997-06-03 | The Charles Stark Draper Laboratory, Inc. | Micromechanical tuning fork angular rate sensor |
| US5220835A (en) | 1991-09-12 | 1993-06-22 | Ford Motor Company | Torsion beam accelerometer |
| US5202785A (en) | 1991-12-20 | 1993-04-13 | Texas Instruments Incorporated | Method and device for steering light |
| JPH0660788A (ja) * | 1992-08-04 | 1994-03-04 | Sharp Corp | 圧電式リレー |
| JPH06103597A (ja) * | 1992-09-16 | 1994-04-15 | Olympus Optical Co Ltd | 集積化光ピックアップ |
| JP3003429B2 (ja) * | 1992-10-08 | 2000-01-31 | 富士電機株式会社 | ねじり振動子および光偏向子 |
| JPH06131960A (ja) * | 1992-10-19 | 1994-05-13 | Sharp Corp | マイクロアクチュエータ、マイクロアクチュエータの製造方法、電気リレーおよび電磁リレー |
| US5650568A (en) * | 1993-02-10 | 1997-07-22 | The Charles Stark Draper Laboratory, Inc. | Gimballed vibrating wheel gyroscope having strain relief features |
| US5416324A (en) | 1993-06-11 | 1995-05-16 | Chun; Cornell S. L. | Optical imaging device with integrated polarizer |
| US5673139A (en) | 1993-07-19 | 1997-09-30 | Medcom, Inc. | Microelectromechanical television scanning device and method for making the same |
| JP2773604B2 (ja) * | 1993-09-02 | 1998-07-09 | 松下電器産業株式会社 | 静電力駆動光走査装置とその製造方法 |
| EP0657760A1 (en) | 1993-09-15 | 1995-06-14 | Texas Instruments Incorporated | Image simulation and projection system |
| US6044705A (en) * | 1993-10-18 | 2000-04-04 | Xros, Inc. | Micromachined members coupled for relative rotation by torsion bars |
| US5629790A (en) | 1993-10-18 | 1997-05-13 | Neukermans; Armand P. | Micromachined torsional scanner |
| US5488862A (en) | 1993-10-18 | 1996-02-06 | Armand P. Neukermans | Monolithic silicon rate-gyro with integrated sensors |
| JP3219123B2 (ja) | 1993-11-29 | 2001-10-15 | 株式会社デンソー | 2次元光走査装置及びそれを用いたバーコード読取装置 |
| US6000280A (en) | 1995-07-20 | 1999-12-14 | Cornell Research Foundation, Inc. | Drive electrodes for microfabricated torsional cantilevers |
| JPH09105634A (ja) * | 1995-10-12 | 1997-04-22 | Nippon Soken Inc | 角速度センサ |
| US5861549A (en) | 1996-12-10 | 1999-01-19 | Xros, Inc. | Integrated Silicon profilometer and AFM head |
| JP2000502468A (ja) | 1995-12-26 | 2000-02-29 | クセロス・インク | コンパクトドキュメントスキャナー又はプリンターエンジン |
| DE69721000T2 (de) | 1996-01-22 | 2003-11-13 | Xros Inc | Aus Silizium mittels Mikromaterialbearbeitung hergestellter, flügelzellenartiger Mikrodurchflussmesser |
| US6044056A (en) | 1996-07-30 | 2000-03-28 | Seagate Technology, Inc. | Flying optical head with dynamic mirror |
| US6061323A (en) | 1996-07-30 | 2000-05-09 | Seagate Technology, Inc. | Data storage system having an improved surface micro-machined mirror |
| US6226233B1 (en) | 1996-07-30 | 2001-05-01 | Seagate Technology, Inc. | Magneto-optical system utilizing MSR media |
| US5940549A (en) | 1996-07-30 | 1999-08-17 | Seagate Technology, Incorporated | Optical system and method using optical fibers for storage and retrieval of information |
| US6034938A (en) | 1996-07-30 | 2000-03-07 | Seagate Technology, Inc. | Data storage system having an optical processing flying head |
| US5850375A (en) | 1996-07-30 | 1998-12-15 | Seagate Technology, Inc. | System and method using optical fibers in a data storage and retrieval system |
| US6178150B1 (en) | 1996-07-30 | 2001-01-23 | Seagate Technology Inc. | Offset optics for use with optical heads |
| WO1998009280A1 (en) | 1996-08-27 | 1998-03-05 | Quinta Corporation | Single-frequency laser source for optical data storage system |
| WO1998009289A1 (en) | 1996-08-27 | 1998-03-05 | Quinta Corporation | Optical head using micro-machined elements |
| US5974019A (en) | 1997-05-05 | 1999-10-26 | Seagate Technology, Inc. | Optical system for two-dimensional positioning of light beams |
| US5930434A (en) | 1997-05-15 | 1999-07-27 | Seagate Technology,. Inc. | Optical disc data storage system using optical waveguide |
| US6246657B1 (en) | 1997-09-22 | 2001-06-12 | Iolon, Inc. | Fiber bundle switch |
| US5905201A (en) * | 1997-10-28 | 1999-05-18 | Alliedsignal Inc. | Micromachined rate and acceleration sensor and method |
-
1999
- 1999-09-02 CA CA002340192A patent/CA2340192A1/en not_active Abandoned
- 1999-09-02 KR KR1020017002445A patent/KR100620341B1/ko not_active IP Right Cessation
- 1999-09-02 US US09/388,772 patent/US6392220B1/en not_active Expired - Lifetime
- 1999-09-02 JP JP2000568104A patent/JP4776779B2/ja not_active Expired - Fee Related
- 1999-09-02 WO PCT/US1999/020218 patent/WO2000013210A2/en active IP Right Grant
- 1999-09-02 EP EP99945469A patent/EP1119792A2/en not_active Withdrawn
-
2010
- 2010-11-30 JP JP2010267138A patent/JP5343062B2/ja not_active Expired - Fee Related
-
2013
- 2013-01-21 JP JP2013008267A patent/JP2013099843A/ja not_active Ceased
-
2014
- 2014-04-18 JP JP2014086619A patent/JP2014176964A/ja active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57183515A (en) * | 1981-05-07 | 1982-11-11 | Nissan Motor Co Ltd | Fuel-injected engine |
| JPH04211218A (ja) * | 1990-01-18 | 1992-08-03 | Fuji Electric Co Ltd | ねじり振動子およびその応用素子 |
| JPH05251805A (ja) * | 1991-10-30 | 1993-09-28 | Hans Steinbichler | 超小形機械式変換器 |
| JPH06109561A (ja) * | 1992-09-29 | 1994-04-19 | Ricoh Co Ltd | 力検出装置 |
| JPH06180428A (ja) * | 1992-12-15 | 1994-06-28 | Matsushita Electric Ind Co Ltd | 静電力駆動小型光スキャナ |
| JPH07322649A (ja) * | 1994-05-24 | 1995-12-08 | Matsushita Electric Ind Co Ltd | マイクロアクチュエータ装置及びその製造方法 |
| JPH0996768A (ja) * | 1995-09-29 | 1997-04-08 | Omron Corp | 光偏向装置 |
| JPH09159938A (ja) * | 1995-12-11 | 1997-06-20 | Fuji Electric Co Ltd | マイクロミラー装置 |
| JPH1068896A (ja) * | 1996-07-19 | 1998-03-10 | Texas Instr Inc <Ti> | マイクロ・メカニカル・デバイスのためのノン・リニア・ヒンジ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140073238A (ko) * | 2012-12-06 | 2014-06-16 | 엘지이노텍 주식회사 | 멤스 소자 및 흔들림 보정 장치 |
| KR102029783B1 (ko) * | 2012-12-06 | 2019-10-08 | 엘지이노텍 주식회사 | 멤스 소자 및 흔들림 보정 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US6392220B1 (en) | 2002-05-21 |
| JP2014176964A (ja) | 2014-09-25 |
| WO2000013210A9 (en) | 2000-08-31 |
| KR20010085627A (ko) | 2001-09-07 |
| WO2000013210A2 (en) | 2000-03-09 |
| EP1119792A2 (en) | 2001-08-01 |
| KR100620341B1 (ko) | 2006-09-13 |
| JP2011104768A (ja) | 2011-06-02 |
| CA2340192A1 (en) | 2000-03-09 |
| JP5343062B2 (ja) | 2013-11-13 |
| JP2002524271A (ja) | 2002-08-06 |
| WO2000013210A3 (en) | 2000-06-15 |
| JP2013099843A (ja) | 2013-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4776779B2 (ja) | 捩り撓みヒンジで連結されて相対的に回転する微細加工部材 | |
| US6044705A (en) | Micromachined members coupled for relative rotation by torsion bars | |
| JP5582518B2 (ja) | 光走査装置 | |
| US7605966B2 (en) | Optical deflector | |
| US6188504B1 (en) | Optical scanner | |
| CN109425981B (zh) | 微机电反射器系统 | |
| JP4982814B2 (ja) | 光ビーム走査装置 | |
| JP4385938B2 (ja) | アクチュエータ | |
| JP5240953B2 (ja) | 光ビーム走査装置 | |
| JP2001519726A (ja) | 微細加工捩り振動子の動的特性の調整 | |
| US20040130765A1 (en) | Resonance scanner | |
| WO2003025657A1 (en) | Actuator-controlled mirror with z-stop mechanism | |
| JP2000180156A (ja) | 微細形状測定装置 | |
| US20210173201A1 (en) | Optical reflective element | |
| WO2011037025A1 (ja) | 光ビーム走査装置 | |
| US20230194855A1 (en) | Micromirror device and optical scanning device | |
| JP2007206480A (ja) | 光走査素子 | |
| JPH04211217A (ja) | 光偏向子 | |
| JPH10123449A (ja) | 光スキャナ | |
| JP2001264676A (ja) | 光スキャナ | |
| JP2022032538A (ja) | 光偏向装置、光走査装置及び光走査式測距装置 | |
| JP2001272626A (ja) | 光スキャナ | |
| JPH1090625A (ja) | 光スキャナ | |
| JPS63241434A (ja) | 可変干渉装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20040212 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20040212 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060822 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20061108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091013 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100113 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100120 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100212 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101019 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110607 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110629 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140708 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |