JP4659465B2 - 振れ補正装置および光学機器 - Google Patents
振れ補正装置および光学機器 Download PDFInfo
- Publication number
- JP4659465B2 JP4659465B2 JP2005016267A JP2005016267A JP4659465B2 JP 4659465 B2 JP4659465 B2 JP 4659465B2 JP 2005016267 A JP2005016267 A JP 2005016267A JP 2005016267 A JP2005016267 A JP 2005016267A JP 4659465 B2 JP4659465 B2 JP 4659465B2
- Authority
- JP
- Japan
- Prior art keywords
- driving
- drive
- shake correction
- shake
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
- H04N23/687—Vibration or motion blur correction performed by mechanical compensation by shifting the lens or sensor position
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2217/00—Details of cameras or camera bodies; Accessories therefor
- G03B2217/005—Blur detection
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Adjustment Of Camera Lenses (AREA)
Description
本発明の第1の目的は、振れ補正を高精度に行うと共に、駆動効率を向上させることのできる振れ補正装置および光学機器を提供しようとするものである。
12 保持枠
13 地板
14a,14b,14c 支持軸
15a,15b,15c 圧縮コイルバネ
16a,16b,16c コイル
17a,17b,17c ヨーク
110a,110b,110c 永久磁石
31p ピッチ目標値
31y ヨー目標値
32p ピッチ駆動力調整部
32y ヨー駆動力調整部
33a 反転器
33b 加算器
34a 第1駆動回路部
34b 第2駆動回路部
34c 第3駆動回路部
Claims (8)
- 振れを補正するためのレンズを保持する保持部材と、
前記保持部材を駆動する第1、第2、第3の駆動手段を有し、
前記第1、第2、第3の駆動手段による駆動力の合力によって前記保持部材を光軸と直交する方向に駆動して前記振れを補正する振れ補正装置であって、
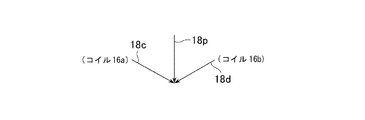
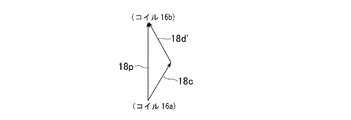
互いに同じ極性の駆動信号によって前記第1の駆動手段および前記第2の駆動手段が同じ大きさの駆動力を前記保持部材に作用させた場合の合力と、互いに逆の極性の駆動信号によって前記第1の駆動手段および前記第2の駆動手段が同じ大きさの駆動力を前記保持部材に作用させた場合の合力の大きさが異なり、かつ方向が直交するように、前記第1の駆動手段と前記第2の駆動手段を配置し、
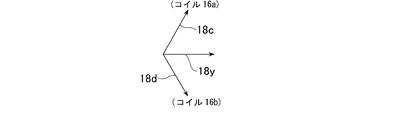
前記互いに同じ極性の駆動信号によって前記第1の駆動手段および前記第2の駆動手段が同じ大きさの駆動力を前記保持部材に作用させた場合の合力と、前記第3の駆動手段に駆動信号を与えることにより発生する駆動力が揃うように、前記第3の駆動手段を配置したことを特徴とする振れ補正装置。 - 前記第3の駆動手段に駆動信号を与えることにより発生する駆動力が、大きな振れ補正力を必要とする方向に揃うように、前記第1、第2、第3の駆動手段を配置したことを特徴とする請求項1に記載の振れ補正装置。
- 前記大きな振れ補正力を必要とする方向は、当該振れ補正装置が搭載される光学機器使用時に振れが大きく振れる方向と一致することを特徴とする請求項2に記載の振れ補正装置。
- 前記大きな振れ補正力を必要とする方向は、当該振れ補正装置が搭載される光学機器のヨー方向と一致することを特徴とする請求項2に記載の振れ補正装置。
- 互いに直交する方向の振れを検出する第1および第2の振動検出手段と、
前記第1の振動検出手段から出力される信号に第1のゲインを与えて、振れ補正のための駆動目標である第1の駆動信号に変換する第1の変換部と、
前記第2の振動検出手段から出力される信号に、前記第1のゲインとは異なる第2のゲインを与えて、振れ補正のための駆動目標である第2の駆動信号に変換する第2の変換部と、
前記第1の駆動信号を互いに同じ極性で前記第1および第2の駆動手段に与える第1の駆動部と、前記第2の駆動信号を互いに逆の極性で前記第1および第2の駆動手段に与える第2の駆動部と、前記第1および第2の振動検出手段のうちの、大きな振れ補正力を必要とする方向の振れを検出する振動検出手段の出力を変換する前記第1もしくは前記第2の変換部からの前記駆動信号を、前記第3の駆動手段に与える第3の駆動部と、
を更に有することを特徴とする請求項1ないし4の何れか1項に記載の振れ補正装置。 - 前記保持部材から放射方向に延出し、前記保持部材を前記放射方向へ移動可能に支持すると共に光軸方向の移動を規制する複数の支持軸を更に有し、
前記第1、第2、第3の駆動手段は、前記保持部材上の、隣り合う前記支持軸と前記支持軸の間の中央に配置されることを特徴とする請求項1ないし5の何れか1項に記載の振れ補正装置。 - 前記保持部材から放射方向に延出し、前記保持部材を前記放射方向へ移動可能を支持すると共に光軸方向の移動を規制する複数の支持軸を更に有し、
前記第1、第2、第3の駆動手段に駆動信号を与えることにより発生する合力を利用して、前記保持部材を光軸と直交する方向に駆動して前記振れを補正する振れ補正装置であって、
前記第1、第2、第3の駆動手段のうちの少なくとも一つの駆動手段は、その駆動力の方向が、前記支持軸が延出した放射方向と揃うように配置されていることを特徴とする請求項1ないし5の何れか1項に記載の振れ補正装置。 - 請求項1ないし7のいずれか1項に記載の振れ補正装置を具備したことを特徴とする光学機器。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005016267A JP4659465B2 (ja) | 2005-01-25 | 2005-01-25 | 振れ補正装置および光学機器 |
| US11/340,355 US7440688B2 (en) | 2005-01-25 | 2006-01-25 | Image blur compensation apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005016267A JP4659465B2 (ja) | 2005-01-25 | 2005-01-25 | 振れ補正装置および光学機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006208413A JP2006208413A (ja) | 2006-08-10 |
| JP2006208413A5 JP2006208413A5 (ja) | 2008-03-13 |
| JP4659465B2 true JP4659465B2 (ja) | 2011-03-30 |
Family
ID=36696859
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005016267A Expired - Fee Related JP4659465B2 (ja) | 2005-01-25 | 2005-01-25 | 振れ補正装置および光学機器 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7440688B2 (ja) |
| JP (1) | JP4659465B2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4486566B2 (ja) * | 2005-08-26 | 2010-06-23 | 富士フイルム株式会社 | 撮影装置 |
| WO2007066499A1 (ja) * | 2005-12-07 | 2007-06-14 | Matsushita Electric Industrial Co., Ltd. | 像振れ補正装置およびカメラ |
| JP5003008B2 (ja) * | 2006-04-17 | 2012-08-15 | コニカミノルタアドバンストレイヤー株式会社 | 手振れ補正装置、レンズユニットおよび撮像装置 |
| JP4992478B2 (ja) * | 2007-03-07 | 2012-08-08 | 株式会社ニコン | ブレ補正ユニット、レンズ鏡筒、カメラ |
| JP5106998B2 (ja) * | 2007-11-16 | 2012-12-26 | パナソニック株式会社 | 光学素子駆動装置及び撮像装置 |
| KR101398470B1 (ko) * | 2008-02-12 | 2014-06-27 | 삼성전자주식회사 | 촬상 장치용 손떨림 보정 모듈 및 이를 구비한 촬상 장치 |
| KR101446777B1 (ko) * | 2008-05-30 | 2014-10-01 | 삼성전자주식회사 | 손떨림 보정장치 및 이를 구비한 디지털 촬영장치 |
| CN101860166B (zh) * | 2009-04-08 | 2013-05-08 | 鸿富锦精密工业(深圳)有限公司 | 致动器及防震相机模组 |
| TWI447431B (zh) * | 2009-04-17 | 2014-08-01 | Hon Hai Prec Ind Co Ltd | 致動器及防震相機模組 |
| TWI410735B (zh) * | 2009-08-26 | 2013-10-01 | Largan Precision Co Ltd | 攝影模組驅動電路 |
| JP5515149B2 (ja) * | 2010-03-03 | 2014-06-11 | 株式会社タムロン | 防振アクチュエータ、及びそれを備えたレンズユニット、カメラ |
| US8189280B2 (en) * | 2010-07-16 | 2012-05-29 | Nokia Corporation | Voice coil motor with pulse-width modulation driver |
| US9158084B2 (en) * | 2012-10-24 | 2015-10-13 | Amo Development, Llc | Scanning lens systems and methods of reducing reaction forces therein |
| JP6170395B2 (ja) * | 2013-09-26 | 2017-07-26 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| CN109798840A (zh) * | 2019-02-26 | 2019-05-24 | 中国科学院光电技术研究所 | 在拼接干涉仪中检测透镜面形的检测装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11109435A (ja) * | 1997-10-07 | 1999-04-23 | Canon Inc | 補正光学装置及び防振装置 |
| JP2001174857A (ja) * | 1999-12-17 | 2001-06-29 | Minolta Co Ltd | 駆動装置 |
| JP2003091028A (ja) * | 2001-09-19 | 2003-03-28 | Canon Inc | 補正手段の位置制御装置 |
| JP2004080458A (ja) * | 2002-08-20 | 2004-03-11 | Ricoh Co Ltd | 画像入力装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3114332B2 (ja) | 1992-03-16 | 2000-12-04 | 富士写真光機株式会社 | カメラの防振装置 |
| US5619293A (en) * | 1994-06-16 | 1997-04-08 | Nikon Corporation | Image blur suppression device of a camera which aligns an image blur suppression lens and actuator based on anticipated sag of supporting members |
| FR2756913B1 (fr) | 1996-12-09 | 1999-02-12 | Valeo Climatisation | Circuit de fluide refrigerant comprenant une boucle de climatisation et une boucle de rechauffage, en particulier pour vehicule automobile |
| JPH10174470A (ja) | 1996-12-17 | 1998-06-26 | Minolta Co Ltd | 駆動装置 |
-
2005
- 2005-01-25 JP JP2005016267A patent/JP4659465B2/ja not_active Expired - Fee Related
-
2006
- 2006-01-25 US US11/340,355 patent/US7440688B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11109435A (ja) * | 1997-10-07 | 1999-04-23 | Canon Inc | 補正光学装置及び防振装置 |
| JP2001174857A (ja) * | 1999-12-17 | 2001-06-29 | Minolta Co Ltd | 駆動装置 |
| JP2003091028A (ja) * | 2001-09-19 | 2003-03-28 | Canon Inc | 補正手段の位置制御装置 |
| JP2004080458A (ja) * | 2002-08-20 | 2004-03-11 | Ricoh Co Ltd | 画像入力装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20060165397A1 (en) | 2006-07-27 |
| JP2006208413A (ja) | 2006-08-10 |
| US7440688B2 (en) | 2008-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4659465B2 (ja) | 振れ補正装置および光学機器 | |
| JP2009258389A (ja) | 像振れ補正装置、撮像装置および光学装置 | |
| JP5259851B1 (ja) | 位置制御装置 | |
| JP4717651B2 (ja) | 像振れ補正装置および撮像装置 | |
| JP4994756B2 (ja) | 防振制御装置およびそれを備えた光学機器、撮像装置、また防振制御装置の制御方法 | |
| JP2007171786A (ja) | 防振制御装置および撮像装置 | |
| JP4956254B2 (ja) | 振れ補正装置および撮像装置 | |
| JP2007057981A (ja) | 姿勢検出装置、姿勢検出方法、及びコンピュータプログラム | |
| JP5094523B2 (ja) | 像振れ補正装置、撮像装置および光学装置 | |
| JP2003091028A (ja) | 補正手段の位置制御装置 | |
| JP2003098566A (ja) | 振動検出手段の信号制御装置 | |
| JP2006292845A (ja) | 撮像装置 | |
| KR101329741B1 (ko) | 손떨림 보정 제어 방법 및 손떨림 보정 제어 장치 | |
| JP2006267752A (ja) | 像振れ補正装置及び光学機器 | |
| JP3526278B2 (ja) | 振れ補正光学装置 | |
| JP2003107552A (ja) | 撮影装置 | |
| JP2003107549A (ja) | 振動検出手段の実装装置及び防振システム | |
| JP4817544B2 (ja) | 防振制御装置、カメラ及び補正手段位置制御装置 | |
| JP4974952B2 (ja) | 像振れ補正装置、撮像装置および光学装置 | |
| JP2003075880A (ja) | 光学装置 | |
| JP2003057708A (ja) | 振れ補正光学装置 | |
| JP2003107551A (ja) | 補正手段用駆動装置及び振れ補正光学装置 | |
| JP2003057709A (ja) | 振れ補正光学装置 | |
| JP2002303908A (ja) | 光学装置、レンズ鏡筒及びカメラ | |
| JP2003107319A (ja) | 光学機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080123 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080123 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100520 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100630 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100921 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101221 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101227 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4659465 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |