JP4657765B2 - ノーズビューシステム - Google Patents
ノーズビューシステム Download PDFInfo
- Publication number
- JP4657765B2 JP4657765B2 JP2005065887A JP2005065887A JP4657765B2 JP 4657765 B2 JP4657765 B2 JP 4657765B2 JP 2005065887 A JP2005065887 A JP 2005065887A JP 2005065887 A JP2005065887 A JP 2005065887A JP 4657765 B2 JP4657765 B2 JP 4657765B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- moving object
- nose view
- feature point
- approaching
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000013598 vector Substances 0.000 claims description 53
- 238000004364 calculation method Methods 0.000 claims description 17
- 230000003287 optical effect Effects 0.000 claims description 17
- 238000001514 detection method Methods 0.000 claims description 13
- 238000013459 approach Methods 0.000 claims description 11
- 210000001331 nose Anatomy 0.000 description 91
- 239000011159 matrix material Substances 0.000 description 39
- 238000000034 method Methods 0.000 description 13
- 230000005484 gravity Effects 0.000 description 11
- 238000003384 imaging method Methods 0.000 description 6
- 238000012806 monitoring device Methods 0.000 description 6
- 238000000354 decomposition reaction Methods 0.000 description 5
- 238000012790 confirmation Methods 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000036544 posture Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000004040 coloring Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 210000000887 face Anatomy 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/022—Collision avoidance systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Regulating Braking Force (AREA)
Description
特許文献2に開示される移動体周辺監視装置は、単一の撮像手段によっても、誤差累積がなく高精度で移動体の位置及び姿勢を特定し、移動体における所望の位置での視界を確保することを目的としたものである。この移動体周辺監視装置は、一つの撮像手段により移動中に周辺を撮像した画像から、特徴点検出手段にて特定平面内の少なくとも四つの特徴点を抽出する。そしてこの装置は、移動体が第1の状態から第2の状態に移動したときに抽出した前記特徴点を特徴点追跡手段によって追跡すると共に、その追跡結果に基づき移動状態特定手段にて、第1及び第2の状態で撮像した画像の前記特徴点の平面座標に応じて、撮像手段の相対的な位置及び姿勢を特定する。更にこの装置は、第1及び第2の状態での撮像手段の位置及び姿勢、第1の状態の画像における所定対象の特徴点の平面座標、並びに第2の状態の画像における所定対象の特徴点に対応する平面座標に基づき3次元座標推定手段にて所定対象の特徴点の3次元座標を推定している。
或いは、距離センサとカメラとを組み合わせて移動物体までの距離を計測する車両用カメラ装置も知られている(例えば、特許文献5を参照)。
本発明は、このような従来の事情を考慮してなされたもので、その目的は、車両に接近する移動物体が該車両の前方を通過する通過予想時間を算出するともに、求めた通過予想時刻および自車速度に応じて適切な接近物体の表示(警報)およびブレーキ制御を行うノーズビューシステムを提供することにある。
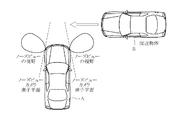
上述のノーズビューシステムは、ノーズビューカメラが撮像した側方画像中の各特徴点の動きベクトルから前記側方画像中の前記車両に接近してくる方向のベクトルを有する物体を接近移動物体として検出する。具体的にこの特徴点は、車両に接近する接近移動物体の角等を抽出したものである。そして上述したノーズビューシステムは、この特徴点の移動を捉えた軌跡から接近移動物体が自車正面を通過する予想通過時刻を演算により算出する。
上述のノーズビューシステムは、通過時刻計算手段が求めた通過時刻に応じて車両に搭載されたモニタに接近移動物体があることを車両の運転者等に通知する。具体的に上述のノーズビューシステムは、該車両に搭載されたモニタに接近移動物体があることを強調表示したり、警報器から警報音を発したりして通知する。
上述のノーズビューシステムは、速度検出手段が検出した車両速度が所定の速度以下、例えば数km/h以下であり、かつ過時刻計算手段が求めた通過時刻が所定の時間以内であると検出したとき、該車両の安全に停止させて接近移動物体との衝突を未然に防止すべく、該車両のブレーキを制御して停止させる。
したがって側方画像(ノーズビュー画像)を長時間に亘って注視しなくても、その表示画像から接近移動物体の存在を確実に把握することができると共に、万一、車両の運転者が接近する車両等を認識できなかったとしても警報音を発したり車両を安全に停止させたりするので、車両運転における安全性を高める上で大きく寄与するという優れた効果を奏し得る。
[a] 前述した如くノーズビューカメラ1を用いて撮像した側方画像(ノーズビュー画像)中の複数の特徴点を検出し、これらの各特徴点のオプティカルフローを計算することでその動きベクトルを求める特徴点検出手段11と、
[b] この特徴点検出手段11にて求められた各特徴点の動きベクトルから前記側方画像(ノーズビュー画像)中の自車(車両A)に接近してくる方向のベクトルを有する物体を接近移動物体として検出する移動物体検出手段12と、
[c] 前記側方画像(ノーズビュー画像)中における上記移動物体検出手段12にて検出された接近移動物体の画像領域を特定して追跡し(特徴点追跡手段13)、この特定した特徴点から接近移動物体が車両の正面を通過する時刻を求める通過時刻計算手段14と
を備えている点にある。
一方、ステップS15で求めた予想通過時刻tcが所定の通過想定時刻Tmより早く(tc<Tm)、かつ自車速度Vが所定の車両速度Vhより遅い範囲にあるとき(0<V<Vh)[ステップS18]、ノーズビュー装置2は、車両がより接近しているとして警報器6から警報音を発すると共に、前述したステップS17で表示制御部15によりモニタ5等になされる接近移動物体に対する強調表示に比べて、より強調された表示を表示制御部15が行う[ステップS19]。この強調表示は、表示制御部15が接近する移動物体に対して例えば赤色や黄色等の色付けを行ってモニタ5上になされるものである。

次いで上述したようにして得られたノーズビュー画像中における特徴点の時間変化を特徴点追跡手段13が追跡する。そしてこの特徴点追跡手段13により追跡された接近移動物体の特徴点から接近移動物体が車両Aの正面を通過する時間を通過時刻計算手段14により求めている。
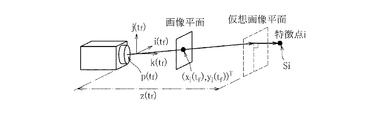
次に本発明が採用した予測時間の算出原理について図7に示す原理図を参照しながら説明する。
まず図7に示す三次元実空間上において、ノーズビューカメラ1の位置をp(tf)、カメラの光軸方向ベクトルをk(tf)、カメラが存在する空間における垂直方向および水平方向のベクトルをそれぞれ垂直ベクトルj(tf)および横ベクトルi(tf)とする。また、この図においてノーズビューカメラ1の方向を表すベクトルi(tf),j(tf),k(tf)は、互いに直交する単位ベクトルである。特徴点は実空間では固定され、画像上の見た目の変化は、カメラの動きによってもたらされたものとし、特徴点iの実空間上の位置をsi=(xi,yi,zi)Tとする。
このような弱透視投影によれば、時刻tfにおける特徴点iの画像上の座標(xi(tf),yi(tf))は、次式で表すことができる。
ところで上述した弱透視投影モデルを適用した場合、実空間上の原点が全特徴点の重心を示すベクトルcにあるとし、かつ実空間上の原点、即ち全特徴点の重心が仮想画像平面上にあるものとしている。したがって次式を得ることができる。
このような特徴ある本発明の一実施形態に係るノーズビューモニタシステムに関し、より詳細に説明する。ちなみに本ノーズビューモニタシステムは、弱透視投影または平行透視投影であって、行列Wを動作行列Mと形状行列Sとに分解すればよく、その計算方法は特に限定されるものではない。
さて、上述の行列Wを特異値に分解すると次式を得る。
ついで行列M,Sの大きさについて検討する。ベクトルi(tf),j(tf)は、三次元実空間上のベクトルであるので、ベクトルi(tf),j(tf)から形成されるベクトルm(tf),n(tf)もまた三次元ベクトルである。一方、フレーム数は、前述したようにF個であり、それがm(tf),n(tf)それぞれにあるので、ベクトルm(tf),n(tf)から形成される行列Mの大きさは、2F×3になる。同様にベクトルsiは、三次元実空間上の位置であるから、やはり三次元ベクトルである。また、特徴点数はP個であるから、ベクトルsiから形成される行列Sの大きさは3×Pとなる。一方、[数7],[数8]から行列Wは、行列Mおよび行列Sとの積であるので、行列Mおよび行列Sの大きさを考慮すれば結局、行列Wの階数(ランク)は、3以下になる。
ここで[数12]の分解結果を用いれば、次式に示す分解結果を得ることができる。
ここにベクトルi(tf),j(tf)は、それぞれ単位ベクトルである。したがって変数z(tf)は、次式に示すように容易に求めることができる。
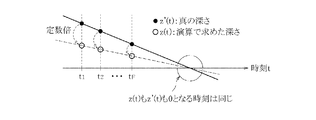
より具体的には、[数22]で得られる全特徴点の重心とカメラとの深さの時系列データz(tf)(ただし1≦f≦F)に対して、回帰直線z(t)=at+bを当てはめ、回帰直線z(t)=0を満たす時刻tc=−(a/b)を予測通過時刻とする。このようにして求めた深さの時系列データz(tf)(ただし1≦f≦F)には、上述したようにノイズを含んでいると考えられる。
2 ノーズビュー装置
3 ノーズビュースイッチ
4 車速センサ
5 モニタ
6 警報器
7 ブレーキ制御部
11 特徴点検出手段
12 移動物体検出手段
13 特徴点追跡手段
14 通過時刻計算手段
15 表示制御部
Claims (3)
- 車両の前部または後部に取り付けられて該車両の側方を撮像するノーズビューカメラと、
前記側方画像中の特徴点を検出すると共に、検出した特徴点の動きベクトルを計算する特徴点検出手段と、
上記計算された各特徴点の動きベクトルから前記側方画像中の前記車両に接近してくる方向のベクトルを有する物体を接近移動物体として検出する移動物体検出手段と、
前記検出された接近移動物体の特徴点を追跡する特徴点追跡手段と、
この特徴点追跡手段により追跡された前記接近移動物体の特徴点から、前記接近移動物体が前記ノーズビューカメラの受光面方向に延伸した平面空間を横切るまでの時間を求める通過時刻計算手段と、
前記接近移動物体の接近を知らせる接近通知手段とを備え、
前記通過時刻計算手段が所定の時間以内に前記接近移動物体が前記車両の正面を通過すると算出したとき、該接近移動物体の接近を通知することを特徴とするノーズビューシステム。 - 前記特徴点検出手段は、前記側方画像中の特徴点のオプティカルフローを計算するものである請求項1に記載のノーズビューシステム。
- 請求項1または2に記載のノーズビューシステムであって、
更に上記車両の速度を検出する速度検出手段を備え、
この速度検出手段が検出した速度が所定の速度以下であり、かつ前記通過時刻計算手段が所定の時間以内に前記接近移動物体が前記車両の前方を通過すると算出したとき、上記車両のブレーキを制御して該車両を停止させるものであるノーズビューシステム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005065887A JP4657765B2 (ja) | 2005-03-09 | 2005-03-09 | ノーズビューシステム |
| US11/362,052 US7925441B2 (en) | 2005-03-09 | 2006-02-27 | Vehicle periphery monitoring apparatus |
| CN2006100595756A CN1834583B (zh) | 2005-03-09 | 2006-03-08 | 车辆周边监视装置 |
| DE102006010735.7A DE102006010735B4 (de) | 2005-03-09 | 2006-03-08 | Fahrzeugumgebungsüberwachungsvorrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005065887A JP4657765B2 (ja) | 2005-03-09 | 2005-03-09 | ノーズビューシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006253932A JP2006253932A (ja) | 2006-09-21 |
| JP4657765B2 true JP4657765B2 (ja) | 2011-03-23 |
Family
ID=36914940
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005065887A Expired - Fee Related JP4657765B2 (ja) | 2005-03-09 | 2005-03-09 | ノーズビューシステム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7925441B2 (ja) |
| JP (1) | JP4657765B2 (ja) |
| CN (1) | CN1834583B (ja) |
| DE (1) | DE102006010735B4 (ja) |
Families Citing this family (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4720355B2 (ja) * | 2005-08-11 | 2011-07-13 | トヨタ自動車株式会社 | 車両制御装置 |
| CN101211408B (zh) * | 2006-12-29 | 2011-05-25 | 东软集团股份有限公司 | 车辆侧面图像识别方法及装置、车灯误识别检测和行驶安全预测方法 |
| JP4893945B2 (ja) * | 2007-02-06 | 2012-03-07 | 株式会社デンソー | 車両周辺監視装置 |
| US8300887B2 (en) * | 2007-05-10 | 2012-10-30 | Honda Motor Co., Ltd. | Object detection apparatus, object detection method and object detection program |
| CN101458078A (zh) * | 2007-12-10 | 2009-06-17 | 鸿富锦精密工业(深圳)有限公司 | 一种汽车防撞系统及方法 |
| JP5177515B2 (ja) * | 2008-06-02 | 2013-04-03 | アイシン精機株式会社 | 周辺認知支援システム |
| JP5083137B2 (ja) * | 2008-09-11 | 2012-11-28 | 三菱自動車工業株式会社 | 運転支援装置 |
| JP5083142B2 (ja) * | 2008-09-19 | 2012-11-28 | 三菱自動車工業株式会社 | 車両周辺監視装置 |
| JP4816748B2 (ja) * | 2009-03-06 | 2011-11-16 | ソニー株式会社 | ナビゲーション装置及びナビゲーション方法 |
| JP5509712B2 (ja) * | 2009-07-31 | 2014-06-04 | 富士通株式会社 | 運転支援システム、運転支援装置、運転支援方法、及び運転支援プログラム |
| DE102009045286A1 (de) * | 2009-10-02 | 2011-04-21 | Robert Bosch Gmbh | Verfahren zur Abbildung des Umfelds eines Fahrzeugs |
| JP2011118483A (ja) * | 2009-11-30 | 2011-06-16 | Fujitsu Ten Ltd | 車載装置および認知支援システム |
| TW201121818A (en) * | 2009-12-28 | 2011-07-01 | Hon Hai Prec Ind Co Ltd | Alarming system for parked car |
| JP5460869B2 (ja) * | 2010-06-29 | 2014-04-02 | 本田技研工業株式会社 | 渋滞予測装置 |
| CN101901354B (zh) * | 2010-07-09 | 2014-08-20 | 浙江大学 | 基于特征点分类的监控录像中实时多目标检测与跟踪方法 |
| JP5603835B2 (ja) * | 2011-06-27 | 2014-10-08 | クラリオン株式会社 | 車両周囲監視装置 |
| US9373042B2 (en) * | 2011-09-20 | 2016-06-21 | Toyota Jidosha Kabushiki Kaisha | Subject change detection system and subject change detection method |
| DE112012003931T5 (de) | 2011-09-21 | 2014-07-10 | Magna Electronics, Inc. | Bildverarbeitungssystem für ein Kraftfahrzeug mit Bilddatenübertragung undStromversorgung über ein Koaxialkabel |
| EP2581268B2 (en) * | 2011-10-13 | 2019-09-11 | Harman Becker Automotive Systems GmbH | Method of controlling an optical output device for displaying a vehicle surround view and vehicle surround view system |
| US20130128050A1 (en) * | 2011-11-22 | 2013-05-23 | Farzin Aghdasi | Geographic map based control |
| US10099614B2 (en) * | 2011-11-28 | 2018-10-16 | Magna Electronics Inc. | Vision system for vehicle |
| WO2013175637A1 (ja) | 2012-05-25 | 2013-11-28 | トヨタ自動車株式会社 | 接近車両検出装置及び運転支援システム |
| EP2701093B1 (en) | 2012-08-20 | 2016-06-22 | Honda Research Institute Europe GmbH | Sensing system and method for detecting moving objects |
| JP6035095B2 (ja) * | 2012-09-26 | 2016-11-30 | 富士重工業株式会社 | 車両の衝突判定装置 |
| KR101274549B1 (ko) * | 2012-10-05 | 2013-06-13 | 주식회사 미르메이트 | 곡선도로의 영상제공 장치. |
| KR101896715B1 (ko) * | 2012-10-31 | 2018-09-07 | 현대자동차주식회사 | 주변차량 위치 추적 장치 및 방법 |
| JP5987660B2 (ja) * | 2012-11-30 | 2016-09-07 | 富士通株式会社 | 画像処理装置、画像処理方法及びプログラム |
| CN103354040B (zh) * | 2013-07-30 | 2016-02-24 | 中科创达软件股份有限公司 | 一种安全报警方法及装置 |
| CN103413325B (zh) * | 2013-08-12 | 2016-04-13 | 大连理工大学 | 一种基于车身特征点定位的车速鉴定方法 |
| JP6307895B2 (ja) * | 2014-01-23 | 2018-04-11 | トヨタ自動車株式会社 | 車両用周辺監視装置 |
| JP6375633B2 (ja) * | 2014-02-12 | 2018-08-22 | 株式会社デンソー | 車両周辺画像表示装置、車両周辺画像表示方法 |
| DE102014111126A1 (de) * | 2014-08-05 | 2016-02-11 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Erzeugen einer Umgebungskarte eines Umgebungsbereichs eines Kraftfahrzeugs, Fahrerassistenzsystem sowie Kraftfahrzeug |
| JP6554280B2 (ja) * | 2014-11-28 | 2019-07-31 | 株式会社デンソーテン | データ処理装置、画像処理方法、及び、プログラム |
| JP6224029B2 (ja) * | 2015-05-21 | 2017-11-01 | 富士通テン株式会社 | 画像処理装置および画像処理方法 |
| JP6450294B2 (ja) | 2015-09-30 | 2019-01-09 | 株式会社デンソーアイティーラボラトリ | 物体検出装置、物体検出方法、及びプログラム |
| JP6534609B2 (ja) * | 2015-12-04 | 2019-06-26 | クラリオン株式会社 | 追跡装置 |
| US9925867B2 (en) * | 2016-01-11 | 2018-03-27 | Ford Global Technologies, Llc | Fuel control regulator system with acoustic pliability |
| CN108275134B (zh) * | 2017-01-05 | 2020-09-15 | 北京行易道科技有限公司 | 车辆位移的处理方法及处理装置 |
| US10421436B2 (en) * | 2017-03-24 | 2019-09-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for surveillance of a vehicle using camera images |
| US11472404B2 (en) * | 2017-09-01 | 2022-10-18 | Murakami Corporation | Collision prediction device, collision prediction method, and program |
| CN109631829B (zh) * | 2018-12-17 | 2022-05-27 | 南京理工大学 | 一种自适应快速匹配的双目测距方法 |
| JP7194890B2 (ja) * | 2019-01-08 | 2022-12-23 | 清 飯尾 | 自動車のミラー装置 |
| US20240087353A1 (en) | 2019-10-31 | 2024-03-14 | Nec Corporation | Image processing apparatus, image processing method, and non-transitory computer readable medium storing image processing program |
| KR20210094475A (ko) | 2020-01-21 | 2021-07-29 | 팅크웨어(주) | 차량 영상 기반의 차간 거리 측정 방법, 차간 거리 측정 장치, 전자 기기, 컴퓨터 프로그램 및 컴퓨터 판독 가능한 기록 매체 |
| US11680813B2 (en) | 2020-01-21 | 2023-06-20 | Thinkware Corporation | Method, apparatus, electronic device, computer program, and computer readable recording medium for measuring inter-vehicle distance based on vehicle image |
| CN112356815B (zh) * | 2020-12-01 | 2023-04-25 | 吉林大学 | 一种基于单目相机的行人主动避撞系统及方法 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3239521B2 (ja) | 1993-03-30 | 2001-12-17 | トヨタ自動車株式会社 | 移動体認識装置 |
| JP3448980B2 (ja) | 1994-09-27 | 2003-09-22 | 株式会社日本自動車部品総合研究所 | 車両用視認補助装置 |
| US5931547A (en) * | 1997-03-05 | 1999-08-03 | Lerner; Meir Yisochor | Anti-collision system |
| JPH11353565A (ja) * | 1998-06-09 | 1999-12-24 | Yazaki Corp | 車両用衝突警報方法及び装置 |
| JP2000161915A (ja) * | 1998-11-26 | 2000-06-16 | Matsushita Electric Ind Co Ltd | 車両用単カメラ立体視システム |
| JP3515926B2 (ja) * | 1999-06-23 | 2004-04-05 | 本田技研工業株式会社 | 車両の周辺監視装置 |
| JP3287817B2 (ja) | 1999-07-27 | 2002-06-04 | 株式会社ホンダアクセス | 車両用カメラ装置 |
| JP3418139B2 (ja) | 1999-07-27 | 2003-06-16 | 株式会社ホンダアクセス | 車両用カメラ装置 |
| JP2001101421A (ja) | 1999-09-30 | 2001-04-13 | Sumitomo Electric Ind Ltd | 走行支援装置 |
| JP3300341B2 (ja) * | 1999-10-12 | 2002-07-08 | 松下電器産業株式会社 | 監視システムおよびカメラ調整方法 |
| JP2001195699A (ja) * | 2000-01-14 | 2001-07-19 | Yazaki Corp | 車両用周辺監視装置及び、車両用衝突危険判断処理プログラムを記録した記録媒体 |
| JP2001213254A (ja) * | 2000-01-31 | 2001-08-07 | Yazaki Corp | 車両用側方監視装置 |
| US6292745B1 (en) * | 2000-07-24 | 2001-09-18 | Navigation Technologies Corp. | Method and system for forming a database of geographic data for distribution to navigation system units |
| US6583730B2 (en) * | 2000-07-28 | 2003-06-24 | Lang-Mekra North America, Llc | Surveillance apparatus for a vehicle |
| JP3835161B2 (ja) | 2000-11-20 | 2006-10-18 | 日産自動車株式会社 | 車両用視界補助装置 |
| US7113867B1 (en) * | 2000-11-26 | 2006-09-26 | Mobileye Technologies Limited | System and method for detecting obstacles to vehicle motion and determining time to contact therewith using sequences of images |
| JP3606223B2 (ja) | 2001-04-26 | 2005-01-05 | 住友電気工業株式会社 | 車両側方映像生成方法及び車両側方映像生成装置 |
| DE10125426A1 (de) * | 2001-05-25 | 2002-11-28 | Bosch Gmbh Robert | Warnsystem und Verfahren zur Überwachung eines toten Winkels für ein Fahrzeug |
| JP4425495B2 (ja) * | 2001-06-08 | 2010-03-03 | 富士重工業株式会社 | 車外監視装置 |
| US6950014B2 (en) * | 2002-02-13 | 2005-09-27 | Ford Global Technologies Llc | Method for operating a pre-crash sensing system in a vehicle having external airbags |
| JP4019736B2 (ja) * | 2002-02-26 | 2007-12-12 | トヨタ自動車株式会社 | 車両用障害物検出装置 |
| JP3776094B2 (ja) | 2002-05-09 | 2006-05-17 | 松下電器産業株式会社 | 監視装置、監視方法および監視用プログラム |
| DE10223123A1 (de) * | 2002-05-24 | 2003-12-04 | Bosch Gmbh Robert | Erfassungsvorrichtung |
| US6728617B2 (en) * | 2002-07-23 | 2004-04-27 | Ford Global Technologies, Llc | Method for determining a danger zone for a pre-crash sensing system in a vehicle having a countermeasure system |
| DE10244205A1 (de) * | 2002-09-23 | 2004-03-25 | Robert Bosch Gmbh | Verfahren und Einrichtung zur Verhinderung der Kollision von Fahrzeugen |
| JP2004198211A (ja) | 2002-12-18 | 2004-07-15 | Aisin Seiki Co Ltd | 移動体周辺監視装置 |
| US6674394B1 (en) * | 2003-03-28 | 2004-01-06 | Visteon Global Technologies, Inc. | Method for determining object location from side-looking sensor data |
| DE10324895A1 (de) * | 2003-05-30 | 2004-12-16 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Objektortung für Kraftfahrzeuge |
| JP4052650B2 (ja) * | 2004-01-23 | 2008-02-27 | 株式会社東芝 | 障害物検出装置、方法及びプログラム |
| JP3952305B2 (ja) * | 2004-02-06 | 2007-08-01 | シャープ株式会社 | 移動体周辺監視装置、移動体周辺監視方法、制御プログラムおよび可読記録媒体 |
| JP4259368B2 (ja) | 2004-03-26 | 2009-04-30 | 三菱自動車工業株式会社 | ノーズビューモニタ装置 |
| DE102005013920B4 (de) * | 2004-03-26 | 2007-12-13 | Mitsubishi Jidosha Kogyo K.K. | Frontsicht-Überwachungsvorrichtung |
| US7130745B2 (en) * | 2005-02-10 | 2006-10-31 | Toyota Technical Center Usa, Inc. | Vehicle collision warning system |
-
2005
- 2005-03-09 JP JP2005065887A patent/JP4657765B2/ja not_active Expired - Fee Related
-
2006
- 2006-02-27 US US11/362,052 patent/US7925441B2/en not_active Expired - Fee Related
- 2006-03-08 CN CN2006100595756A patent/CN1834583B/zh not_active Expired - Fee Related
- 2006-03-08 DE DE102006010735.7A patent/DE102006010735B4/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20060204039A1 (en) | 2006-09-14 |
| DE102006010735B4 (de) | 2016-03-10 |
| CN1834583B (zh) | 2011-07-06 |
| DE102006010735A1 (de) | 2006-09-14 |
| JP2006253932A (ja) | 2006-09-21 |
| US7925441B2 (en) | 2011-04-12 |
| CN1834583A (zh) | 2006-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4657765B2 (ja) | ノーズビューシステム | |
| US8933797B2 (en) | Video-based warning system for a vehicle | |
| JP6185970B2 (ja) | 車両の後方側面に隣接する物体を検出する方法 | |
| JP4720386B2 (ja) | 運転支援装置 | |
| JP4707067B2 (ja) | 障害物判別装置 | |
| JP4692344B2 (ja) | 画像認識装置 | |
| WO2014109016A1 (ja) | 車両周辺表示装置 | |
| KR101729486B1 (ko) | Avm 시스템에서의 사각 지대 감시 방법 및 그 avm 시스템 | |
| JP5418661B2 (ja) | 車両周辺監視装置 | |
| JP2010044561A (ja) | 乗物搭載用監視装置 | |
| JP2009231937A (ja) | 車両用周囲監視装置 | |
| JP5083142B2 (ja) | 車両周辺監視装置 | |
| JP2009154775A (ja) | 注意喚起装置 | |
| JP5172482B2 (ja) | 車両周辺監視装置 | |
| JP5845909B2 (ja) | 障害物警報装置 | |
| KR101849326B1 (ko) | 차량용 카메라 시스템 | |
| JP2009246808A (ja) | 車両用周辺監視装置 | |
| WO2013114871A1 (ja) | 運転支援装置及び運転支援方法 | |
| Song et al. | Lateral driving assistance using optical flow and scene analysis | |
| JP2008129676A (ja) | 周辺監視装置 | |
| KR101750201B1 (ko) | 차량의 거동을 이용한 bsd | |
| KR101543119B1 (ko) | 합성된 주행 영상 제공방법 | |
| JP2008263325A (ja) | 車外撮影カメラ画像表示装置 | |
| Ciardelli et al. | Smart sensing framework for automotive safety based on a dual-camera system and CANbus data | |
| CN116890865A (zh) | 驾驶支援装置、驾驶支援方法及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080305 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080312 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080509 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080801 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081028 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20081118 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20090130 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101222 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140107 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4657765 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |