JP4635263B2 - 前照灯照射角度制御システム - Google Patents
前照灯照射角度制御システム Download PDFInfo
- Publication number
- JP4635263B2 JP4635263B2 JP2007010696A JP2007010696A JP4635263B2 JP 4635263 B2 JP4635263 B2 JP 4635263B2 JP 2007010696 A JP2007010696 A JP 2007010696A JP 2007010696 A JP2007010696 A JP 2007010696A JP 4635263 B2 JP4635263 B2 JP 4635263B2
- Authority
- JP
- Japan
- Prior art keywords
- curve
- information
- headlamp
- irradiation angle
- host vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
- B60Q1/08—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically
- B60Q1/12—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to steering position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/112—Vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/114—Vehicle acceleration or deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/32—Road surface or travel path
- B60Q2300/322—Road curvature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/33—Driving situation
- B60Q2300/331—Driving situation characterised by the driving side, e.g. on the left or right hand side
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
Description
また、請求項5に記載の発明では、車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、自車両の現在地を検出する自車両検出手段と、道路情報を記憶保持する記憶保持手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、前記カーブ半径、前記距離情報、及び前記線型情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、前記照射角度算出部にて算出された照射角度に前記前照灯を制御する照射角度制御部とを備え、前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、及び線型情報Cを独立変数として、これら独立変数がそれぞれ所定係数β1〜δ1にて重み付けされるとともに、定数α1を含めた下式(8)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、前記カーブの半径が大きくなるほど、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度の絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする。
また、請求項11に記載の発明では、車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、自車両の現在地を検出する自車両検出手段と、道路情報を記憶保持する記憶保持手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、前記カーブ半径、前記距離情報、及び前記線型情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、前記照射角度算出部にて算出された照射角度に前記前照灯を制御する照射角度制御部とを備え、前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、及び線型情報Cを独立変数として、これら独立変数がそれぞれ所定係数β1〜δ1にて重み付けされるとともに、定数α1を含めた下式(8)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、前記距離が短くなるほど、前記前照灯の照射方向を当該自車両が曲がる方向に向けるべく、前記スイブル角度の絶対値が大きくなるように、前記係数及び定数が定められていることを特徴とする。
(数8)
スイブル角度θ=定数α1+β1×カーブ半径R+γ1×距離L+δ1×線型情報C・・・(8)
また、前照灯照射角度制御システムとしての上記請求項1,5,11に記載の構成によれば、カーブ半径R、距離L及び線型情報Cを考慮して立式された上式(8)にて示される一次式を通じて、簡単な演算にて、スイブル角度θを算出することができるようになる。
また、上記請求項1に記載の構成によれば、手前のカーブだけでなく後に続くカーブの線型も見渡すことができるようになる。
前記カーブの半径が大きくなるほど、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度の絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする。
また、請求項12に記載の発明では、車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、自車両の現在地を検出する自車両検出手段と、道路情報を記憶保持する記憶保持手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、前記カーブ半径、前記距離情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、前記照射角度算出部にて算出された照射角度に前記前照灯を制御する照射角度制御部とを備え、前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β2〜ε2にて重み付けされるとともに、定数α2を含めた下式(9)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、前記距離が短くなるほど、前記前照灯の照射方向を当該自車両が曲がる方向に向けるべく、前記スイブル角度の絶対値が大きくなるように、前記係数及び定数が定められていることを特徴とする。
(数9)
スイブル角度θ=定数α2+β2×カーブ半径R+γ2×距離L+ε2×勾配情報φ・・・(9)
また、前照灯照射角度制御システムとしての上記請求項6,12に記載の構成によれば、カーブ半径R、距離L、及び勾配情報φを考慮して立式された上式(9)にて示される一次式を通じて、簡単な演算で、スイブル角度θを算出することができるようになる。
(数10)
スイブル角度θ=定数α3+β3×カーブ半径R+γ3×距離L+ε3×勾配情報φ・・
・(10)
(数11)
スイブル角度θ=定数α4+β4×カーブ半径R+γ4×距離L・・・(11)
他方、上記目的を達成するため、請求項2に記載の発明では、車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、自車両の現在地を検出する自車両検出手段と、道路情報を記憶保持する記憶保持手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、前記カーブ半径、前記距離情報、前記線型情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、前記照射角度算出部にて算出された前記照射角度に前記前照灯を制御する照射角度制御部とを備え、前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、線型情報C、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β5〜ε5にて重み付けされるとともに、定数α5を含めた下式(12)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、前記カーブがS字カーブであると判定されるとき、前記カーブがS字カーブでないと判定されるときに比べて、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度θの絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする。
また、請求項8に記載の発明では、車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、自車両の現在地を検出する自車両検出手段と、道路情報を記憶保持する記憶保持手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、前記カーブ半径、前記距離情報、前記線型情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、前記照射角度算出部にて算出された前記照射角度に前記前照灯を制御する照射角度制御部とを備え、前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、線型情報C、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β5〜ε5にて重み付けされるとともに、定数α5を含めた下式(12)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、前記カーブの半径が大きくなるほど、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度の絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする。
また、請求項14に記載の発明では、車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、自車両の現在地を検出する自車両検出手段と、道路情報を記憶保持する記憶保持手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、前記カーブ半径、前記距離情報、前記線型情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、前記照射角度算出部にて算出された前記照射角度に前記前照灯を制御する照射角度制御部とを備え、前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、線型情報C、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β5〜ε5にて重み付けされるとともに、定数α5を含めた下式(12)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、前記距離が短くなるほど、前記前照灯の照射方向を当該自車両が曲がる方向に向けるべく、前記スイブル角度の絶対値が大きくなるように、前記係数及び定数が定められていることを特徴とする。
(数12)
スイブル角度θ=定数α5+β5×カーブ半径R+γ5×距離L+δ5×線型情報C+ε5×勾配情報φ・・・(12)
また、前照灯照射角度制御システムとしての上記請求項2,8,14に記載の構成によれば、カーブ半径R、距離L、線型情報C、及び勾配情報φを考慮して立式された上式(12)にて示される一次式を通じて、簡単な演算にて、スイブル角度θを算出することができるようになる。
(数13)
スイブル角度θ=定数α6+β6×カーブ半径R+γ6×距離L+δ6×線型情報C+ε
6×勾配情報φ・・・(13)
(数14)
スイブル角度θ=定数α7+β7×カーブ半径R+γ7×距離L+δ7×線型情報C・・
・(14)
(数15)
φ=sin-1[(G−G1)/g]・・・(15)
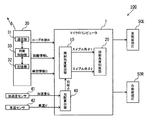
なお、勾配算出部40は、上式(15)に基づく勾配φの算出は所定の周期ごとに実行しており、算出した勾配φを照射角度算出部10に出力する。このようにして、勾配算出部40、加速度センサ41及び車速センサ42によって、勾配情報取得手段が構成されている。
(数16)
スイブル角度θ1=定数α6+β6×カーブ半径R+γ6×距離L+δ6×線型情報C・・・(16)
(数17)
スイブル角度θ2=定数α7+β7×カーブ半径R+γ7×距離L+δ7×線型情報C+ε7×勾配情報φ・・・(17)
ここで、スイブル角度θ1及びθ2は、自車両の前方を基準として、右側(日本では運転席側)を正に、左側(日本では助手席側)を負としている。また、上式(16)及び(17)中のカーブ半径R[m]、距離L[m]及び線型情報Cは、カーナビゲーション装置30にて所定周期ごとに取得され、同じく勾配情報φ[%]は、勾配算出部40にて上式(15)に基づき所定周期ごとに算出される。なお、勾配算出部40においては、勾配情報φ[rad]の算出に併せて、その次元も[rad]から[%]に変換される。また、これら独立変数に対し重み付けされる所定係数β6〜δ6及びβ7〜ε7並びに定数α6及びα7は、後述する実験を通じて得られたデータを例えば重回帰分析を用いて決定した値が採用されている。
Claims (16)
- 車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、
自車両の現在地を検出する自車両検出手段と、
道路情報を記憶保持する記憶保持手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、
前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、
前記カーブ半径、前記距離情報、及び前記線型情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、
前記照射角度算出部にて算出された照射角度に前記前照灯を制御する照射角度制御部とを備え、
前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、
前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、
前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、及び線型情報Cを独立変数として、これら独立変数がそれぞれ所定係数β1〜δ1にて重み付けされるとともに、定数α1を含めた下式(1)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、
前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、
前記カーブがS字カーブであると判定されるとき、前記カーブがS字カーブでないと判定されるときに比べて、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度θの絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。
(数1)
スイブル角度θ=定数α1+β1×カーブ半径R+γ1×距離L+δ1×線型情報C・・・(1) - 車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、
自車両の現在地を検出する自車両検出手段と、
道路情報を記憶保持する記憶保持手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、
前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、
自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、
前記カーブ半径、前記距離情報、前記線型情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、
前記照射角度算出部にて算出された前記照射角度に前記前照灯を制御する照射角度制御部とを備え、
前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、
前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、
前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、線型情報C、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β5〜ε5にて重み付けされるとともに、定数α5を含めた下式(5)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、
前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、
前記カーブがS字カーブであると判定されるとき、前記カーブがS字カーブでないと判定されるときに比べて、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度θの絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。
(数5)
スイブル角度θ=定数α5+β5×カーブ半径R+γ5×距離L+δ5×線型情報C+ε5×勾配情報φ・・・(5) - 請求項2に記載の前照灯照射角度制御システムにおいて、
前記照射角度算出部は、当該自車両が運転席側に曲がるとき、スイブル角度θを下式(6)に基づき算出するとともに、助手席側に曲がるとき、スイブル角度θを下式(7)に基づき算出し、
前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度に前記前照灯を制御することを特徴とする前照灯照射角度制御システム。
(数6)
スイブル角度θ=定数α6+β6×カーブ半径R+γ6×距離L+δ6×線型情報C+ε6×勾配情報φ・・・(6)
(数7)
スイブル角度θ=定数α7+β7×カーブ半径R+γ7×距離L+δ7×線型情報C・・・(7) - 請求項1〜3のいずれか一項に記載の前照灯照射角度制御システムにおいて、
前記カーブの半径が大きくなるほど、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度の絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。 - 車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、
自車両の現在地を検出する自車両検出手段と、
道路情報を記憶保持する記憶保持手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、
前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、
前記カーブ半径、前記距離情報、及び前記線型情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、
前記照射角度算出部にて算出された照射角度に前記前照灯を制御する照射角度制御部とを備え、
前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、
前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、
前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、及び線型情報Cを独立変数として、これら独立変数がそれぞれ所定係数β1〜δ1にて重み付けされるとともに、定数α1を含めた下式(1)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、
前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、
前記カーブの半径が大きくなるほど、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度の絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。
(数1)
スイブル角度θ=定数α1+β1×カーブ半径R+γ1×距離L+δ1×線型情報C・・・(1) - 車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、
自車両の現在地を検出する自車両検出手段と、
道路情報を記憶保持する記憶保持手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、
自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、
前記カーブ半径、前記距離情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、
前記照射角度算出部にて算出された照射角度に前記前照灯を制御する照射角度制御部とを備え、
前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、
前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β2〜ε2にて重み付けされるとともに、定数α2を含めた下式(2)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、
前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、
前記カーブの半径が大きくなるほど、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度の絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。
(数2)
スイブル角度θ=定数α2+β2×カーブ半径R+γ2×距離L+ε2×勾配情報φ・・・(2) - 請求項6に記載の前照灯照射角度制御システムにおいて、
前記照射角度算出部は、当該自車両が運転席側に曲がるとき、スイブル角度θを下式(3)に基づき算出するとともに、助手席側に曲がるとき、スイブル角度θを下式(4)に基づき算出し、
前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度に前記前照灯を制御することを特徴とする前照灯照射角度制御システム。
(数3)
スイブル角度θ=定数α3+β3×カーブ半径R+γ3×距離L+ε3×勾配情報φ・・・(3)
(数4)
スイブル角度θ=定数α4+β4×カーブ半径R+γ4×距離L・・・(4) - 車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、
自車両の現在地を検出する自車両検出手段と、
道路情報を記憶保持する記憶保持手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、
前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、
自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、
前記カーブ半径、前記距離情報、前記線型情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、
前記照射角度算出部にて算出された前記照射角度に前記前照灯を制御する照射角度制御部とを備え、
前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、
前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、
前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、線型情報C、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β5〜ε5にて重み付けされるとともに、定数α5を含めた下式(5)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、
前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、
前記カーブの半径が大きくなるほど、前記前照灯の照射方向を当該自車両の前方正面に近づけるべく、前記スイブル角度の絶対値の大きさが小さくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。
(数5)
スイブル角度θ=定数α5+β5×カーブ半径R+γ5×距離L+δ5×線型情報C+ε5×勾配情報φ・・・(5) - 請求項8に記載の前照灯照射角度制御システムにおいて、
前記照射角度算出部は、当該自車両が運転席側に曲がるとき、スイブル角度θを下式(6)に基づき算出するとともに、助手席側に曲がるとき、スイブル角度θを下式(7)に基づき算出し、
前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度に前記前照灯を制御することを特徴とする前照灯照射角度制御システム。
(数6)
スイブル角度θ=定数α6+β6×カーブ半径R+γ6×距離L+δ6×線型情報C+ε6×勾配情報φ・・・(6)
(数7)
スイブル角度θ=定数α7+β7×カーブ半径R+γ7×距離L+δ7×線型情報C・・・(7) - 請求項1〜9のいずれか一項に記載の前照灯照射角度制御システムにおいて、
前記距離が短くなるほど、前記前照灯の照射方向を当該自車両が曲がる方向に向けるべく、前記スイブル角度の絶対値が大きくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。 - 車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、
自車両の現在地を検出する自車両検出手段と、
道路情報を記憶保持する記憶保持手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、
前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、
前記カーブ半径、前記距離情報、及び前記線型情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、
前記照射角度算出部にて算出された照射角度に前記前照灯を制御する照射角度制御部とを備え、
前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、
前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、
前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、及び線型情報Cを独立変数として、これら独立変数がそれぞれ所定係数β1〜δ1にて重み付けされるとともに、定数α1を含めた下式(1)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、
前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、
前記距離が短くなるほど、前記前照灯の照射方向を当該自車両が曲がる方向に向けるべく、前記スイブル角度の絶対値が大きくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。
(数1)
スイブル角度θ=定数α1+β1×カーブ半径R+γ1×距離L+δ1×線型情報C・・・(1) - 車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、
自車両の現在地を検出する自車両検出手段と、
道路情報を記憶保持する記憶保持手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、
自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、
前記カーブ半径、前記距離情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、
前記照射角度算出部にて算出された照射角度に前記前照灯を制御する照射角度制御部とを備え、
前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、
前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β2〜ε2にて重み付けされるとともに、定数α2を含めた下式(2)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、
前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、
前記距離が短くなるほど、前記前照灯の照射方向を当該自車両が曲がる方向に向けるべく、前記スイブル角度の絶対値が大きくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。
(数2)
スイブル角度θ=定数α2+β2×カーブ半径R+γ2×距離L+ε2×勾配情報φ・・・(2) - 請求項12に記載の前照灯照射角度制御システムにおいて、
前記照射角度算出部は、当該自車両が運転席側に曲がるとき、スイブル角度θを下式(3)に基づき算出するとともに、助手席側に曲がるとき、スイブル角度θを下式(4)に基づき算出し、
前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度に前記前照灯を制御することを特徴とする前照灯照射角度制御システム。
(数3)
スイブル角度θ=定数α3+β3×カーブ半径R+γ3×距離L+ε3×勾配情報φ・・・(3)
(数4)
スイブル角度θ=定数α4+β4×カーブ半径R+γ4×距離L・・・(4) - 車両に配設される前照灯の照射角度を制御する前照灯照射角度制御システムであって、
自車両の現在地を検出する自車両検出手段と、
道路情報を記憶保持する記憶保持手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両が進入するカーブの半径を取得する半径情報取得手段と、
前記自車両の現在地及び前記道路情報に基づいて、自車両の現在地から前記カーブの開始点までの距離情報を取得する距離情報取得手段と、
前記カーブが、異なる方向へ連続して曲がる線型を有するS字カーブであるか否かを前記道路情報に基づいて判定するとともに、その判定結果である線型情報を取得する線型情報取得手段と、
自車両が走行する道路の現在地の前方方向における当該自車両の前後方向の勾配情報を取得する勾配情報取得手段と、
前記カーブ半径、前記距離情報、前記線型情報、及び前記勾配情報に基づいて、前記前照灯の照射角度を算出する照射角度算出部と、
前記照射角度算出部にて算出された前記照射角度に前記前照灯を制御する照射角度制御部とを備え、
前記線型情報取得手段は、前記カーブがS字カーブであると判定するとき、前記線型情報Cとして「1」を出力するとともに、前記カーブがS字カーブでないと判定するとき、前記線型情報Cとして「0」を出力し、
前記距離情報取得手段は、前記カーブの開始点を基準として、自車両の現在地から前記カーブの開始点までの距離情報L[m]を取得し、
前記照射角度算出部は、カーブ半径R[m]、距離情報L[m]、線型情報C、及び勾配情報φ[%]を独立変数として、これら独立変数がそれぞれ所定係数β5〜ε5にて重み付けされるとともに、定数α5を含めた下式(5)に基づいて、自車両前方を基準とするスイブル角度θ[度]を前記前照灯の照射角度として算出し、
前記照射角度制御部は、前記照射角度算出部にて算出された前記スイブル角度θに前記前照灯を制御する前照灯照射角度制御システムにおいて、
前記距離が短くなるほど、前記前照灯の照射方向を当該自車両が曲がる方向に向けるべく、前記スイブル角度の絶対値が大きくなるように、前記係数及び定数が定められていることを特徴とする前照灯照射角度制御システム。
(数5)
スイブル角度θ=定数α5+β5×カーブ半径R+γ5×距離L+δ5×線型情報C+ε5×勾配情報φ・・・(5) - 請求項14に記載の前照灯照射各制御システムにおいて、
前記照射角度算出部は、当該自車両が運転席側に曲がるとき、スイブル角度θを下式(6)に基づき算出するとともに、助手席側に曲がるとき、スイブル角度θを下式(7)に基づき算出し、
前記照射角度制御部は、前記照射角度算出部にて算出されたスイブル角度に前記前照灯を制御することを特徴とする前照灯照射角度制御システム。
(数6)
スイブル角度θ=定数α6+β6×カーブ半径R+γ6×距離L+δ6×線型情報C+ε6×勾配情報φ・・・(6)
(数7)
スイブル角度θ=定数α7+β7×カーブ半径R+γ7×距離L+δ7×線型情報C・・・(7) - 請求項1〜15のいずれか一項に記載の前照灯照射角度制御システムにおいて、
前記定数及び前記係数は、カーブ開始点及び該カーブ開始点の所定距離手前の複数の地
点に実車を静止させるとともに、この静止された実車の運転席に着座した複数の被験者が
、カーブの線型を最も視認しやすいと感じるスイブル角度を、予め定められた複数のスイ
ブル角度の中から選択する実験を通じて決定された値であることを特徴とする前照灯照射角度制御システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007010696A JP4635263B2 (ja) | 2007-01-19 | 2007-01-19 | 前照灯照射角度制御システム |
| DE102008000091.4A DE102008000091B4 (de) | 2007-01-19 | 2008-01-18 | Vorrichtung zur Steuerung eines Beleuchtungswinkels von Scheinwerfern eines Fahrzeugs |
| CN200810003741XA CN101224724B (zh) | 2007-01-19 | 2008-01-18 | 用于控制车辆前灯的照明角度的装置 |
| US12/009,584 US8200396B2 (en) | 2007-01-19 | 2008-01-18 | Apparatus for controlling lighting angle of headlights of vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007010696A JP4635263B2 (ja) | 2007-01-19 | 2007-01-19 | 前照灯照射角度制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008174153A JP2008174153A (ja) | 2008-07-31 |
| JP4635263B2 true JP4635263B2 (ja) | 2011-02-23 |
Family
ID=39628267
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007010696A Expired - Fee Related JP4635263B2 (ja) | 2007-01-19 | 2007-01-19 | 前照灯照射角度制御システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8200396B2 (ja) |
| JP (1) | JP4635263B2 (ja) |
| CN (1) | CN101224724B (ja) |
| DE (1) | DE102008000091B4 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5016516B2 (ja) * | 2008-02-13 | 2012-09-05 | 株式会社小糸製作所 | 車両用ランプ照射方向制御システム |
| KR20110057836A (ko) * | 2009-11-25 | 2011-06-01 | 현대자동차주식회사 | 차량 전조등의 고속도로 및 시가지 모드를 구현하는 가변형 전조등 시스템 |
| EP2402212B1 (en) * | 2010-07-01 | 2014-08-06 | Koito Manufacturing Co., Ltd. | Control device for vehicle lamp, vehicle lamp, and method of controlling vehicle lamp |
| KR101650359B1 (ko) * | 2010-07-12 | 2016-08-23 | 현대모비스 주식회사 | 하이 빔 어시스트 구동 방법 및 장치 |
| DE102010039399A1 (de) | 2010-08-17 | 2012-02-23 | Visteon Global Technologies, Inc. | Prädiktiv-adaptive Frontbeleuchtung eines Kraftfahrzeuges |
| US8635010B2 (en) * | 2011-02-15 | 2014-01-21 | Telenav, Inc. | Navigation system with accessory control mechanism and method of operation thereof |
| CN103171484A (zh) * | 2011-12-23 | 2013-06-26 | 鸿富锦精密工业(深圳)有限公司 | 具有驾驶辅助装置的汽车 |
| KR101460724B1 (ko) * | 2012-03-19 | 2014-11-12 | 현대모비스 주식회사 | 자동차 및 자동차의 제어방법 |
| DE102012103630A1 (de) * | 2012-04-25 | 2013-10-31 | Hella Kgaa Hueck & Co. | Verfahren zum Einstellen des Schwenkwinkels von Kurvenlichtscheinwerfern eines Fahrzeugs |
| CN103376118B (zh) * | 2012-04-27 | 2017-02-15 | 北京四维图新科技股份有限公司 | 基于曲率的辅助驾驶的方法及装置 |
| KR101946778B1 (ko) * | 2012-11-20 | 2019-02-12 | 현대모비스 주식회사 | 차량의 램프 소등 제어 방법 및 이를 구현하는 차량의 램프 소등 제어 장치 |
| KR20140109664A (ko) * | 2013-03-06 | 2014-09-16 | 현대모비스 주식회사 | 차량용 조명 시스템 및 그 제어방법 |
| CN103192758B (zh) * | 2013-04-19 | 2015-02-11 | 北京航空航天大学 | 基于机器视觉的前照灯随动转向控制方法 |
| DE102013219096A1 (de) * | 2013-09-23 | 2015-03-26 | Hella Kgaa Hueck & Co. | Verfahren zur Steuerung der Ausleuchtung eines Straßenverlaufs |
| DE102014209771A1 (de) | 2014-05-22 | 2015-11-26 | Hella Kgaa Hueck & Co. | Verfahren zur Steuerung eines Kurvenlichts und Beleuchtungsvorrichtung |
| DE102014218572A1 (de) * | 2014-09-16 | 2016-03-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines von einem Scheinwerfer auszusendenden Kurvenlichts für ein Fahrzeug |
| CN104786915A (zh) * | 2015-03-30 | 2015-07-22 | 无锡市崇安区科技创业服务中心 | 一种汽车前照灯弯道调节照射方向的方法 |
| CN108638955B (zh) * | 2018-03-23 | 2025-07-29 | 常州星宇车灯股份有限公司 | 一种自适应弯道辅助照明系统 |
| DE102018219604A1 (de) * | 2018-11-15 | 2020-05-20 | Robert Bosch Gmbh | Verfahren und Steuereinheit zum Einstellen einer Leuchtweite von zumindest einem Scheinwerfer eines Fahrzeugs |
| CN112277787A (zh) * | 2019-07-23 | 2021-01-29 | 中车株洲电力机车研究所有限公司 | 一种智轨电车的虚拟轨道自适应照明装置及方法 |
| CN110329294A (zh) * | 2019-08-16 | 2019-10-15 | 中车株洲电力机车有限公司 | 头灯偏转控制方法、装置、系统及机车 |
| DE102021002775B3 (de) * | 2021-05-28 | 2022-08-04 | Mercedes-Benz Group AG | Verfahren zur Anpassung eines Scheinwerfersystems |
| CN114851950B (zh) * | 2022-06-07 | 2024-05-14 | 阿维塔科技(重庆)有限公司 | 转向辅助照明控制方法、装置及汽车 |
| EP4603331A1 (en) * | 2022-10-14 | 2025-08-20 | Koito Manufacturing Co., Ltd. | Method for creating database, leveling control method, database, and control system |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2783079B2 (ja) * | 1992-08-28 | 1998-08-06 | トヨタ自動車株式会社 | ヘッドランプの配光制御装置 |
| JPH06191344A (ja) * | 1992-12-25 | 1994-07-12 | Toyota Motor Corp | ヘッドランプの配光制御装置 |
| JPH07132773A (ja) * | 1993-11-05 | 1995-05-23 | Toyota Motor Corp | 車両用前照灯装置 |
| JP2001001832A (ja) * | 1999-06-15 | 2001-01-09 | Nissan Motor Co Ltd | 車両用照明装置 |
| JP2001213227A (ja) * | 2000-02-04 | 2001-08-07 | Koito Mfg Co Ltd | 車輌用照明システム |
| JP3752958B2 (ja) * | 2000-04-17 | 2006-03-08 | 日産自動車株式会社 | 車両用照明装置 |
| JP4318065B2 (ja) * | 2000-08-10 | 2009-08-19 | 株式会社エクォス・リサーチ | 配光制御装置 |
| US6626563B2 (en) * | 2000-10-03 | 2003-09-30 | Denso Corporation | Automatic optical-axis adjusting device for automatically adjusting optical axes of front lights of vehicle with reduced number of signals |
| JP3560540B2 (ja) * | 2000-10-03 | 2004-09-02 | 株式会社デンソー | 車両用前照灯光軸方向自動調整装置 |
| JP4396071B2 (ja) * | 2001-08-31 | 2010-01-13 | 株式会社デンソー | 車両用前照灯光軸方向自動調整装置 |
| JP4029633B2 (ja) * | 2002-03-12 | 2008-01-09 | 三菱自動車工業株式会社 | 配光制御装置 |
| CN2686925Y (zh) * | 2003-06-08 | 2005-03-23 | 袁招荣 | 机动车辆自动随方向盘转弯照明灯 |
| US7477976B2 (en) * | 2003-07-28 | 2009-01-13 | Denso Corporation | Automatic optical axis direction adjusting apparatus for vehicles |
| JP2005239122A (ja) * | 2004-01-29 | 2005-09-08 | Denso Corp | 車両用前照灯光軸方向自動調整装置 |
| CN2690218Y (zh) * | 2004-04-05 | 2005-04-06 | 张善蛟 | 自动转向前灯的汽车 |
| JP2005313806A (ja) * | 2004-04-30 | 2005-11-10 | Koito Mfg Co Ltd | 車両用照明装置 |
| JP2007010696A (ja) | 2005-06-28 | 2007-01-18 | Kyocera Mita Corp | 画像形成装置 |
| JP4548405B2 (ja) * | 2006-10-31 | 2010-09-22 | 株式会社デンソー | 前照灯スイブル制御装置 |
-
2007
- 2007-01-19 JP JP2007010696A patent/JP4635263B2/ja not_active Expired - Fee Related
-
2008
- 2008-01-18 DE DE102008000091.4A patent/DE102008000091B4/de not_active Expired - Fee Related
- 2008-01-18 CN CN200810003741XA patent/CN101224724B/zh not_active Expired - Fee Related
- 2008-01-18 US US12/009,584 patent/US8200396B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20080262681A1 (en) | 2008-10-23 |
| JP2008174153A (ja) | 2008-07-31 |
| DE102008000091A1 (de) | 2008-08-21 |
| DE102008000091B4 (de) | 2018-11-15 |
| CN101224724B (zh) | 2010-06-02 |
| US8200396B2 (en) | 2012-06-12 |
| CN101224724A (zh) | 2008-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4635263B2 (ja) | 前照灯照射角度制御システム | |
| US11529964B2 (en) | Vehicle automated driving system | |
| US7860627B2 (en) | Automatic optical axis direction adjusting apparatus for vehicles | |
| US9965956B2 (en) | Collision risk calculation device, collision risk display device, and vehicle body control device | |
| JP7087623B2 (ja) | 車両の制御装置 | |
| JP6460019B2 (ja) | 車両の制御装置 | |
| JP2017162406A (ja) | 車両の自動運転制御システム | |
| JP2011070311A (ja) | 運転支援表示装置 | |
| JP2020189549A (ja) | 表示ユニット | |
| JP6978469B2 (ja) | 表示ユニット | |
| JP2007033434A (ja) | 車両用現在位置検出装置、及び車両制御装置 | |
| JP2009248865A (ja) | 車群走行制御装置 | |
| JP2018005468A (ja) | 車両の制御装置 | |
| JP4913992B2 (ja) | 車両走行支援システム | |
| JP6772527B2 (ja) | 車両の制御装置 | |
| JP2018005830A (ja) | 車両の制御装置 | |
| ES2944704T3 (es) | Método de funcionamiento de un sistema de información al conductor en un vehículo ego y sistema de información al conductor | |
| JP2006146783A (ja) | 走行支援情報表示装置 | |
| JPH1030935A (ja) | 車両用経路誘導装置 | |
| JP6701913B2 (ja) | 車両の制御装置 | |
| JP6413869B2 (ja) | 車両環境情報提供システム | |
| KR20140114152A (ko) | 네비게이션 단말기를 이용한 후측방 경보 시스템 및 그의 경보 제어 방법 | |
| JP4403848B2 (ja) | 車両用前照灯装置 | |
| JP6590059B2 (ja) | 車両の自動運転制御システム | |
| JP4891745B2 (ja) | 退出検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20090305 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100513 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100615 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100806 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101102 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101104 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4635263 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |