JP4560923B2 - 野菜収穫機 - Google Patents
野菜収穫機 Download PDFInfo
- Publication number
- JP4560923B2 JP4560923B2 JP2000283600A JP2000283600A JP4560923B2 JP 4560923 B2 JP4560923 B2 JP 4560923B2 JP 2000283600 A JP2000283600 A JP 2000283600A JP 2000283600 A JP2000283600 A JP 2000283600A JP 4560923 B2 JP4560923 B2 JP 4560923B2
- Authority
- JP
- Japan
- Prior art keywords
- belt
- shoulder alignment
- conveyor
- vegetable
- tension
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Harvesting Machines For Root Crops (AREA)
Description
【発明の属する技術分野】
本発明は、野菜収穫機に関するものであって、農業機械の技術分野に属する。
【0002】
【従来の技術】
従来の野菜収穫機は、走行装置を備えた車体上に、左右一対の挾持ベルトによって、圃場に植生している根菜類、例えば、人参や大根の茎葉部を挾持し、走行している車体と回転駆動されている挾持ベルトとの共同作用によって圃場から強制的に引き抜いて収穫する構成の引き抜き式の根菜収穫機や、補助作業者が、圃場から手作業によって収穫した野菜を収穫コンベヤ装置上に載置して車体側に搬送して収集する方式の野菜収穫機や、また、玉ねぎや馬鈴薯等のように土中に成育している野菜は、適宜深さの土中を進行する掘取機によって掘り取りながら収穫する構成の収穫機等がある。
【0003】
【発明が解決しようとする課題】
上述した従来の野菜収穫機において、左右一対の挾持ベルトによって、圃場に植生している根菜類の茎葉を挟持して堀取る構成の堀取り装置は、後続する肩揃えベルトと茎葉切断カッターとを軸架して、茎葉を基部から切断して果肉部を収穫する構成としている。
従来の肩揃えベルトは、これを支持する肩揃えフレームと機体フレームとを連結せず、後部のタッピングケースを介して機体フレームに連結し、巻回域内に複数のテンションプーリを設けて張力を調節可能に構成していた。
【0004】
そのため、従来のこの種の野菜収穫機は、肩揃えフレームの支持構成が不安定な状態にあり、左右の肩揃えベルトがずれて段違いになり、根菜類の肩部(茎葉の基部)が傾いて切断位置が不揃いになったり、茎葉切断カッターと上下の関係位置に狂いが生じて、肩部を揃えて茎葉切断カッターに供給するのが困難で、茎葉の切断位置が不揃いとなり、切断精度が低下する課題があった。
また、テンションプーリを移動させて肩揃えベルトの張力を調節可能であるものの、前後方向から調節操作を行なう必要があり、肩揃えベルトや周囲の機枠部材が調節操作の邪魔となり、調節操作が難しいという課題があった。
【0005】
【課題を解決するための手段】
本発明は、上述した課題を解決するために、次の如き技術手段を講ずるものである。
請求項1の発明は、車体(6)に野菜の茎葉を挟持して引き抜く左右一対の挟持ベルト(4,4’)を備える収穫搬送装置(15)を設け、該収穫搬送装置(15)を車体(6)に連結した機体フレーム(7)で支持し、前記左右一対の挟持ベルト(4,4’)の終端部下方に野菜の果肉部を上側に揃えて搬送する肩揃えベルト(3)を肩揃えフレーム(5)に回転自由に支持して設け、該肩揃えフレーム(5)に調節支持板(38)を設け、該調節支持板(38)に肩揃えベルト(3)の張力を調節する外側テンションプーリ(35a)を設け、該調節支持板(38)の外側に外側テンションプーリ(35a)を左右方向に調節操作するテンションボルト(36)を設け、前記肩揃えベルト(3)の内側に搬送方向上手側が左右に回動する調節板(37)を設け、該調節板(37)に肩揃えベルト(3)の挟持間隔を調節する内側テンションプーリ(35b)を設け、前記機体フレーム(7)から上方に延長した支持腕(8)の上部で前記肩揃えフレーム(5)の搬送始端側を支持し、前記肩揃えベルト(3)の上側に野菜の茎葉を挟持して後方に搬送するタッピングベルト(1)を設け、該肩揃えベルト(3)の後部にタッピングベルト(1)で搬送中の野菜の茎葉を切断する茎葉切断カッター(2)を設け、該茎葉切断カッター(2)で茎葉が切断された野菜を受けて車体(6)の側方に搬送する搬送コンベア(16)を設け、該搬送コンベア(16)から野菜を受けて野菜の果肉部に残る残葉を処理する残葉処理装置(46)を設けた残葉処理コンベア(47)を設け、該残葉処理コンベア(47)の後側に残葉処理コンベア(47)から受けた野菜を作業者が選別する選別コンベア(49)を設け、該選別コンベア(49)から排出される野菜を収納する収納コンテナ(17)を設けたことを特徴とする野菜収穫機とした。
【0006】
【0007】
【発明の効果】
請求項1の発明の効果は、調節支持板(38)の外側に外側テンションプーリ(35a)を左右方向に移動させるテンションボルト(36)を設けたことにより、このテンションボルト(36)の調節操作を肩揃えベルト(3)の左右外側から行うことができるので、肩揃えベルト(3)の張力の調節を容易に行える。
また、搬送方向上手側が左右に回動する調節板(37)に内側テンションプーリ(35b)を設けたことにより、調節板(37)を回動させて肩揃えベルト(3)の挟持間隔を調節することができる。
そして、機体フレーム(7)から上方に延長した支持腕(8)の上部と肩揃えフレーム(5)とを肩揃えベルト(3)の搬送始端側で連結支持したことにより、肩揃えフレーム(5)の支持姿勢が安定し、左右一対の肩揃えベルト(3)が水平に支持されるので、野菜を水平状態のまま茎葉切断カッター(2)に供給することができ、野菜の茎葉部の切断位置が狂うことを防止でき、茎葉部の切断精度が向上する。
さらに、支持腕(8)の上部と肩揃えフレーム(5)とを肩揃えベルト(3)の搬送始端側で連結支持したことにより、肩揃えベルト(3)の始端部分を強固に支持することができるので、野菜の肩揃えによる扱き作用が肩揃えベルト(3)にかかっても、肩揃えベルト(3)と後続するタッピングベルト(1)と茎葉切断カッター(2)との位置関係が狂うことがなく、野菜の肩揃えと茎葉部の切断が適確に行なわれる。
【0008】
【0009】
【発明の実施の形態】
以下、本発明の実施の形態について説明する。まず、車体6は、図4、及び図5に示すように、前部の低位置に設けた走行ミッション装置11から両側に延長して設けているホイールシャフトの駆動スプロケット12に、左右一対のクローラ13を設けて構成している。
【0010】
そして、前記走行ミッション装置11は、車体6に搭載しているエンジンに伝動可能に連結し、変速装置、サイドクラッチ、サイドブレーキ等を内装して、前記クローラ13を伝動する構成としている。なお、エンジン、及び伝動機構、経路については後述する。そして、車体6は、図4、及び図5に示すように、前部右側に操縦座席14を設け、その左側から後部のスペースを利用して、後述する収穫搬送装置15(挟持ベルト4、4’)や一連の装置(肩揃えベルト3、茎葉切断カッター2)、搬送コンベヤ16、収納コンテナ17を配置して人参の収穫機を構成している。
【0011】
そこで、まず、収穫搬送装置15は、具体的には、図8、及び図9に示すように、左右一対の挟持ベルト4、4’からなり、始端部側のテンションプレート18の遊動プーリ19と、終端部側の伝動機枠20(図5参照)の駆動プーリ21とに巻回して構成している。そして、収穫搬送装置15は、図4、及び図5に示すように、車体6の左側において、始端部を前方低部の地面近くに臨ませて、終端部を後方上部に位置させて傾斜状態に設け、前記伝動機枠20の下方の伝動ケースから伝動する構成としている。実施例の場合、収穫搬送装置15は、図3に示すように、後部を車体6に一体として接続し、前方下方に向けて延長した機体フレーム7に強固に連結支持し、具体的な図示を省略するが、機体フレーム7の後部を回動支点に上下回動して昇降自由に調節ができる構成としている。
【0012】
そして、収穫搬送装置15は、搬送始端部において、左右一対の挟持ベルト4、4’で人参の茎葉部の基部(人参果肉部の肩に近い部分)を挟持して、車体6の前進作用と上方への搬送力とによって圃場面から引き抜きながら、吊り下げ状態で上方、後方に搬送して収穫する構成としている。そして、前述のテンションプレート18は、図8に示すように、前記挟持ベルト4、4’を張圧する複数の中間テンションプーリ22や、挟持ベルト4、4’の下側に沿わせて所定長さの間、人参を案内する左右一対の肩揃えバー23を取り付けるために前後に沿って延長した左右の支持機枠24の前部にテンション調節可能に取り付けて構成している。すなわち、テンションプレート18は、図9に示すように、上記支持機枠24に左右方向(挟持ベルト4、4’の挟持間隔を調節する方向)に移動調節可能に長孔25と固定ねじ26とで取り付けて構成している。そして、押しボルト27は、図9で解るように、支持機枠24の受部材28に調節自由に捩じ込んで支持し、先端部を前記テンションプレート18に設けた押圧板29に押し当ててねじ操作で左右方向に移動調節ができるように構成している。そして、テンションプレート18は、図8、及び図9に示すように、複数のテンションプーリ30を軸受支持して挟持ベルト4、4’を内側から押圧して左右ベルトの挟持間隔を調整できる構成としている。この調節は、横側からできるから比較的やりやすい。
【0013】
そして、前記中間テンションプーリ22は、図10に示すように、前記した左右一対の肩揃えバー23に対応する上方位置に配置しており、支持機枠24に支持したテンションアーム31とテンションスプリング32とによって自動テンションが働く構成とし、回動する挟持ベルト4、4’を、内側から張圧する構成としている。
【0014】
以上のように、収穫搬送装置15は、挟持ベルト4、4’の搬送始端部分では、人参を圃場から抜き取る位置の挟持力を調整でき、搬送中間部分の肩揃えバー23の上方位置では、人参の肩部を揃えるとき(人参に縦方向の扱き作用が働くとき)、挟持力をテンション作用で自動調整して必要な張圧力を確保できるものとなった。
【0015】
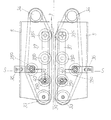
つぎに、肩揃えベルト3と、タッピングベルト1と、葉茎切断カッター2と、排葉ベルト10との構成について説明する。まず、肩揃えベルト3は、図1、及び図11に示すように、肩揃えフレーム5に軸架している始端部プーリ33と終端部プーリ34、及び複数のテンションプーリ35に巻回して構成し、図3、及び図5に示すように、挟持ベルト4、4’の終端部分の下方に配置して略水平状に設けている。そして、支持腕8は、図1、乃至図3に示すように、左右両側にあって、下端部を下方の機体フレーム7に固着し、上方に延長して上端部を左右の肩揃えフレーム5の始端側に寄った部位に固着して支持している。そして、肩揃えベルト3は、図11、及び図12に示すように、外側にテンションボルト36で調節可能に軸受した外側テンションプーリ35aを設け、内側に調節板37に軸受した内側テンションプーリ35bを設けて張力を調節できる構成としている。
【0016】
この場合、外側テンションプーリ35aは、図12で解るように、肩揃えフレーム5を上下から挟んだ調節支持板38に軸架され、その肩揃えフレーム5との間に設けたテンションボルト36で左右方向に調節する構成としている。そのために、肩揃えベルト3は、前後方向(搬送方向)ではなく、左右方向に外側からテンションボルト36の調節操作ができるから、調節が楽にできる利点がある。
【0017】
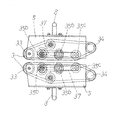
そして、内側テンションプーリ35bは、図13に示す作用図で解るように、搬送下手側の内側テンションプーリ35cを支点にして調節板37の上手側(始端側)が、左右に回動して左右一対の肩揃えベルト3の挟持間隔を調節する構成としている。こ実施例の場合、調節板37は、図11の拡大図に示すように、調節ねじ39を調節長孔40の範囲内で調節できる構成としている。この構成も、前述した収穫搬送装置15を構成する挟持ベルト4、4’から離れているから調節が容易にできる。
【0018】
そして、茎葉切断カッター2は、左右一対からなるが、図1、及び図3に示すように、肩揃えベルト3のすぐ後(下手側)に軸架して設け、上側のタッピングベルト1に挟持されて供給された人参の茎葉の基部を切断する構成としている。そして、排葉ベルト10は、図1、及び図2に示すように、上記タッピングベルト1の上側に設け、果肉部から切断された茎葉を機外に排出する構成としている。
【0019】
つぎに、本発明に係る野菜収穫機全体の伝動構成の概略を、図6、及び図7に基づいて説明する。この場合、上述した構成で説明しなかった機能装置を含めて述べる。まず、エンジン41から出力された回転動力は、図6に示すように、走行ミッション装置11と、作業装置側の中間軸42とに分岐して伝動する構成をとっている。そして、回転動力は、中間軸42から後部軸43に伝動され、後部軸43から前部作業機(サブソイラ44とテールカッタ48)と、搬送コンベヤ16と、伝動ケース45とに分配伝動する構成としている。
【0020】
更に、搬送コンベヤ16に達した回転動力は、図6に示すように、前側の残葉処理装置46付コンベヤ47と、後側の選別コンベヤ49とに分配伝動する構成としている。そして、伝動ケース45に達した回転動力は、図6、及び図7に示すように、右端(図6参照)から順番に、横引起し装置50と縦引起し装置51と、挟持ベルト4、4’と、タッピングケース9との左右両側にそれぞれ分配して伝動する構成としている。
【0021】
なお、上記したサブソイラ44は、圃場に植っている人参の両側の土壌に振動を与えて軟らかくして堀取り(引き抜き)を容易にする目的で装置している。又、テールカッタ48は、挟持ベルト4、4’の搬送中間部分の下側に装置して、人参に生えている根毛、尾根毛(商品価値を保つため)を、搬送過程に切断除去するシリンダカッターからなる切断装置である。
【0022】
以上のように構成した野菜収穫機の作用を説明する。まず、野菜収穫機は、エンジン41(図6、及び図7参照)を始動して、機体の回転各部を駆動しながら、収穫搬送装置15の堀取り高さを予め設定し、クローラ13を伝動して車体6を、圃場内に前進させながら人参の収穫作業を開始する。
【0023】
すると、圃場に植えられている人参は、前部で地面に接するような低い位置から前進方向に突出して上方へ回転している縦引起し装置51の作用圏内に達した葉茎部分が誘導案内され、更に、横引起し装置50の作用も受けて起立状態に引き起こされる。続いて、サブソイラ44は、土中で振動を続けながら車体6の前進につれて、人参の側部に達し、周囲の土壌を振動によって柔らかくし、引き抜き易い状態にして、その人参を挟持ベルト4、4’の始端部が挟持して上方へ引き抜き作用をする。
【0024】
このようにして、人参は、左右一対の挟持ベルト4、4’に挟持されて上方に搬送されながら、途中でテールカッタ48によって、根(根毛)が切断され、更に上方に搬送される。そして、人参は、肩揃えベルト3に持ち換えられて後方に搬送方向が変更され、タッピングベルト1に達して受け継ぎ搬送されながら、茎葉切断カッター2によって茎葉が切り落とされる。
【0025】
そして、人参は、搬送コンベヤ16上に受け継がれて車体6の側方に搬送されて残葉処理装置46付コンベヤ47から後側の選別コンベヤ49に供給され、収納コンテナ17に連続的に搬送されて収穫される。上述のように人参の収穫作業中において、肩揃えベルト3は、肩揃えフレームの安定した支持構成により、左右のベルト(フレーム)に段差をなくして、両方を揃えて水平状に支持し、人参の肩を水平に近い状態に揃えることが可能となった。特に、肩揃えベルト3は、既に説明したように、上側の挟持ベルト4、4’との関係で比較的強い扱き作用が働いて肩揃えが行われる始端側部分を、強固に支持して固定している。したがって、人参は、水平状態に保ったまま茎葉切断カッター2に供給でき、茎葉上部がタッピングベルト1に持ち替えられて、肩揃えベルト3の終端部から茎葉切断カッター2に達したとき、切断位置(人参の)に狂いがほとんどなく、切断精度を高めることができる特徴がある。
【0026】
このように、実施例の場合、肩揃えベルト3は、扱き作用が働いても位置が狂うことなく保持され、後続するタッピングベルト1、茎葉切断カッター2等の一連の機構との関係位置が狂いなく確保されている。したがって、本発明は、人参の肩揃えと切断との一連の関連作業が適確にでき、商品価値を損なわず果肉部を収穫できる特徴を有する。
【0027】
そして、実施例に係る収穫搬送装置15は、挟持ベルト4、4’の搬送始端部分では、人参を圃場から抜き取る位置の挟持力を、図9に示すように、テンションプレート18を調整して適確に行なうことができ、更に、搬送中間部分の肩揃えバー23の上方位置では、図8、及び図10で解るように、人参の肩部を揃えるとき(人参に縦方向の扱き作用が働くとき)、挟持力をテンション作用で自動調整して必要な張圧力を確保できるものとなっている。
【0028】
そして、肩揃えベルト3は、図11、及び図12に示すように、外側にテンションボルト36と外側テンションプーリ35aを設け、内側に調節板37に軸受した内側テンションプーリ35bを設けて張力を調節できるものとしているから、必要な挟持力を常に確保できる利点がある。そして、肩揃えベルト3は、実施例の構成では、前後方向(搬送方向)ではなく、左右方向に外側からテンションボルト36の調節操作ができるから、周囲の機枠部材に邪魔されずに、調節が楽にできる特徴がある。
【0029】
更に、内側テンションプーリ35bは、図13に示す作用図で解るように、搬送下手側の内側テンションプーリ35cの軸心を中心(支点)にして調節板37の上手側(始端側)を、左右に回動して左右一対の肩揃えベルト3の挟持間隔を調節する構成としているから、調節ねじ39が挟持ベルト4、4’から後方に離れており、調節操作を、挟持ベルト4、4’や関連部材に邪魔されずに容易にできる利点がある。
【図面の簡単な説明】
【図1】 本発明の実施例であって、要部の切断側面図である。
【図2】 本発明の実施例であって、平面図である。
【図3】 本発明の実施例であって、側面図である。
【図4】 本発明の実施例であって、平面図である。
【図5】 本発明の実施例であって、側面図である。
【図6】 本発明の実施例であって、線図で示す伝動機構の平面図である。
【図7】 本発明の実施例であって、線図で示す伝動機構の側面図である。
【図8】 本発明の実施例であって、収穫搬送装置の内部を示す平面図である。
【図9】 本発明の実施例であって、挟持ベルトの平面図である。
【図10】 本発明の実施例であって、挟持ベルトの平面図である。
【図11】 本発明の実施例であって、肩揃えベルトの平面図である。
【図12】 本発明の実施例であって、図11のSーS線断面図である。
【図13】 本発明の実施例であって、肩揃えベルトの作用を示す平面図である。
【符号の説明】
1 タッピングベルト
2 茎葉切断カッター
3 肩揃えベルト
4 挟持ベルト
4’ 挟持ベルト
5 肩揃えフレーム
6 車体
7 機体フレーム
8 支持腕
9 タッピングケース
10 排葉ベルト
15 収穫搬送装置
16 搬送コンベア
17 コンテナ
35a 外側テンションプーリ
35b 内側テンションプーリ
36 テンションボルト
37 調節板
38 調節支持板
47 残葉処理コンベア
49 選別コンベア
Claims (1)
- 車体(6)に野菜の茎葉を挟持して引き抜く左右一対の挟持ベルト(4,4’)を備える収穫搬送装置(15)を設け、該収穫搬送装置(15)を車体(6)に連結した機体フレーム(7)で支持し、前記左右一対の挟持ベルト(4,4’)の終端部下方に野菜の果肉部を上側に揃えて搬送する肩揃えベルト(3)を肩揃えフレーム(5)に回転自由に支持して設け、該肩揃えフレーム(5)に調節支持板(38)を設け、該調節支持板(38)に肩揃えベルト(3)の張力を調節する外側テンションプーリ(35a)を設け、該調節支持板(38)の外側に外側テンションプーリ(35a)を左右方向に調節操作するテンションボルト(36)を設け、前記肩揃えベルト(3)の内側に搬送方向上手側が左右に回動する調節板(37)を設け、該調節板(37)に肩揃えベルト(3)の挟持間隔を調節する内側テンションプーリ(35b)を設け、前記機体フレーム(7)から上方に延長した支持腕(8)の上部で前記肩揃えフレーム(5)の搬送始端側を支持し、前記肩揃えベルト(3)の上側に野菜の茎葉を挟持して後方に搬送するタッピングベルト(1)を設け、該肩揃えベルト(3)の後部にタッピングベルト(1)で搬送中の野菜の茎葉を切断する茎葉切断カッター(2)を設け、該茎葉切断カッター(2)で茎葉が切断された野菜を受けて車体(6)の側方に搬送する搬送コンベア(16)を設け、該搬送コンベア(16)から野菜を受けて野菜の果肉部に残る残葉を処理する残葉処理装置(46)を設けた残葉処理コンベア(47)を設け、該残葉処理コンベア(47)の後側に残葉処理コンベア(47)から受けた野菜を作業者が選別する選別コンベア(49)を設け、該選別コンベア(49)から排出される野菜を収納する収納コンテナ(17)を設けたことを特徴とする野菜収穫機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000283600A JP4560923B2 (ja) | 2000-09-19 | 2000-09-19 | 野菜収穫機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000283600A JP4560923B2 (ja) | 2000-09-19 | 2000-09-19 | 野菜収穫機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002084847A JP2002084847A (ja) | 2002-03-26 |
| JP2002084847A5 JP2002084847A5 (ja) | 2008-02-14 |
| JP4560923B2 true JP4560923B2 (ja) | 2010-10-13 |
Family
ID=18767940
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000283600A Expired - Fee Related JP4560923B2 (ja) | 2000-09-19 | 2000-09-19 | 野菜収穫機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4560923B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5861389B2 (ja) * | 2011-10-31 | 2016-02-16 | 井関農機株式会社 | 根菜類収穫機 |
| JP6631801B2 (ja) * | 2016-09-28 | 2020-01-15 | 井関農機株式会社 | 作物引抜機 |
| CN114179147B (zh) * | 2021-11-30 | 2023-08-25 | 安徽豪门国药股份有限公司 | 一种多功能切药机 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61195613A (ja) * | 1985-02-27 | 1986-08-29 | 株式会社 太田鉄工 | いも類収穫機 |
| JPH07143812A (ja) * | 1993-11-24 | 1995-06-06 | Kubota Corp | 根菜類収穫機の前処理部構造 |
| JPH08168310A (ja) * | 1994-12-16 | 1996-07-02 | Kobashi Kogyo Co Ltd | 農産物収穫機 |
| JPH09205840A (ja) * | 1996-02-09 | 1997-08-12 | Iseki & Co Ltd | 根菜類用収穫機 |
| JP2001275428A (ja) * | 2000-03-31 | 2001-10-09 | Kubota Corp | 根菜類収穫機の葉部除去装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0570226U (ja) * | 1992-03-05 | 1993-09-24 | 株式会社クボタ | 根菜類用収穫機の収穫部構造 |
-
2000
- 2000-09-19 JP JP2000283600A patent/JP4560923B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61195613A (ja) * | 1985-02-27 | 1986-08-29 | 株式会社 太田鉄工 | いも類収穫機 |
| JPH07143812A (ja) * | 1993-11-24 | 1995-06-06 | Kubota Corp | 根菜類収穫機の前処理部構造 |
| JPH08168310A (ja) * | 1994-12-16 | 1996-07-02 | Kobashi Kogyo Co Ltd | 農産物収穫機 |
| JPH09205840A (ja) * | 1996-02-09 | 1997-08-12 | Iseki & Co Ltd | 根菜類用収穫機 |
| JP2001275428A (ja) * | 2000-03-31 | 2001-10-09 | Kubota Corp | 根菜類収穫機の葉部除去装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002084847A (ja) | 2002-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7186967B2 (ja) | 根菜収穫機 | |
| JP4560923B2 (ja) | 野菜収穫機 | |
| JP3724189B2 (ja) | 根菜類用収穫機 | |
| JP4059587B2 (ja) | 収穫機および収穫方法 | |
| JP4183837B2 (ja) | 歩行形農作物収穫機 | |
| JP3876716B2 (ja) | 野菜収穫機 | |
| JP3140952U (ja) | 地下茎作物の収穫機 | |
| JP3662726B2 (ja) | 自走式根菜収穫機 | |
| JP4543529B2 (ja) | 野菜収穫機の茎葉引起し装置 | |
| JP3747624B2 (ja) | 人参収穫機 | |
| JP7182524B2 (ja) | 作物収穫機 | |
| JP4539931B2 (ja) | 野菜収穫機 | |
| JP2000060249A (ja) | 野菜収穫機の挟持搬送装置 | |
| JP2720257B2 (ja) | 根菜類収穫機 | |
| JP2017148023A (ja) | 作物引抜機 | |
| JP3747626B2 (ja) | 野菜収穫機 | |
| JPH0795806A (ja) | 農産物収穫機 | |
| JP2008048646A (ja) | 地下茎作物の収穫装置 | |
| JP3467800B2 (ja) | 野菜収穫機 | |
| JP2001069832A (ja) | 野菜収穫機 | |
| JP2002325509A (ja) | 根菜類の収穫機 | |
| JPH10150817A (ja) | 根菜類の収穫機 | |
| JPH0654613A (ja) | 根菜類収穫機 | |
| JP2001190111A (ja) | 野菜収穫機の被覆材押圧装置 | |
| JPH09308343A (ja) | 根菜収穫機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070919 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090820 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091110 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100706 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100719 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130806 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4560923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |