JP4519864B2 - 交流回転機の電気的定数測定方法およびこの測定方法の実施に使用する交流回転機の制御装置 - Google Patents
交流回転機の電気的定数測定方法およびこの測定方法の実施に使用する交流回転機の制御装置 Download PDFInfo
- Publication number
- JP4519864B2 JP4519864B2 JP2007017800A JP2007017800A JP4519864B2 JP 4519864 B2 JP4519864 B2 JP 4519864B2 JP 2007017800 A JP2007017800 A JP 2007017800A JP 2007017800 A JP2007017800 A JP 2007017800A JP 4519864 B2 JP4519864 B2 JP 4519864B2
- Authority
- JP
- Japan
- Prior art keywords
- constant
- rotating machine
- voltage command
- axis component
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/16—Estimation of constants, e.g. the rotor time constant
Description
例えば、特許文献1では、先ず、V/f一定の制御処理で、1次角周波数指令ω1に比例して1次電圧指令V1cを出力する。また、この1次角周波数指令ω1を積分して1次電圧ベクトルの位相指令θv1を求める。そして、この1次電圧の大きさ指令V1cと、1次電圧ベクトルの位相指令θv1に対応してPWM信号を出力し、定格周波数近くで、定格磁束(定格周波数と定格電圧の比)で定常運転を行なう。次に、一般的な三相交流/二相直流変換処理により所定の演算を行ない、無効パワー分電流Idと有効パワー分電流Iqを求めている。そして、このId、Iq、1次角周波数指令値ω1および1次電圧指令値V1cと、予め測定した1次抵抗r1と合成漏れインダクタンスLx(Lx≒ll+l2)とを基に所定の演算により自己インダクタンス、即ち、電機子インダクタンスL1を求めている。
前記交流回転機の制御装置は、
前記交流回転機の電流を検出する電流検出手段、前記電流検出手段からの電流検出値を前記d−q軸上の電流検出値に変換する座標変換手段、前記d−q軸上の電流指令と前記角周波数と前記交流回転機の複数の電気的定数との関係式から前記d−q軸上の第1の電圧指令を演算する第1の電圧指令演算手段、前記d−q軸上の電流指令と前記d−q軸上の電流検出値との差分電流が零に収斂するよう前記差分電流に基づき前記d−q軸上の第2の電圧指令を演算する第2の電圧指令演算手段、前記d−q軸上の第1の電圧指令と前記d−q軸上の第2の電圧指令とを加算して前記d−q軸上の第3の電圧指令を演算する第3の電圧指令演算手段、および前記d−q軸上の第3の電圧指令に基づき前記交流回転機に電圧を印加する電圧印加手段を備え、
更に、前記第1の電圧指令演算手段は、その前記複数の電気的定数の少なくとも1つを外部から入力する定数設定値で設定するようにし、
前記定数設定値を、前記第2の電圧指令演算手段からの第2の電圧指令を、もしくは前記第2の電圧指令演算手段からの第2の電圧指令を前記回転二軸座標上の電流指令で除算する演算式により演算した結果を、更に積分し該積分した値に比例定数を乗算する処理を行った結果を前記定数設定値として出力する定数測定手段を備えた交流回転機の制御装置を使用し、
前記電流指令および前記角周波数を所定の値または範囲に設定して前記制御装置を起動し、前記第2の電圧指令が所定の範囲内となった時点における前記定数測定手段からの前記定数設定値を、測定対象である前記交流回転機の電気的定数として出力するものである。
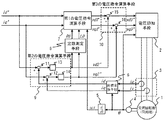
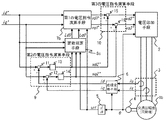
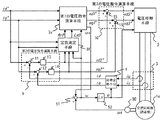
図1は本発明の実施の形態1による交流回転機の制御装置の構成を示すブロック図である。交流回転機1は同期機であって、ここでは、表面磁石型の同期機である。交流回転機1には、電圧を印加する、インバータ等の電力変換器が相当する電圧印加手段2と、交流回転機1の電流を検出する電流検出手段3と、交流回転機1の回転位置θを検出する回転位置検出器4とが接続されている。
なお、電流検出手段3は、図1に示すようなU相電流およびV相電流を直接検出する方法以外に、U相電流およびV相電流に加えW相電流も直接検出する方法でも良いし、公知技術である電圧印加手段2のDCリンク電流からU相電流およびV相電流を検出する方法(例えば、Y.Murai et al.,”Three−Phase Current−Waveform−Detection on PWM Inverter from DC Link Current−Steps”,Proceedings of IPEC−Yokohama 1995,pp.271−275,Yokohama,Japan,April 1995)を用いても良い。
定数測定手段8は、第2の電圧指令演算手段9が出力する第2の電圧指令vd2*およびvq2*に基づいて演算した交流回転機1の電機子抵抗設定値R0と電機子インダクタンス設定値L0を第1の電圧指令演算手段7に出力する。
電圧印加手段2は、第3の電圧指令演算手段10が出力する第3の電圧指令vd3*およびvq3*に基づいて交流回転機1に電圧を印加する。
vq=R×iq+ωr×(L×id+φf) ・・・(2)
vd:交流回転機1の電圧のd軸成分
vq:交流回転機1の電圧のq軸成分
R:交流回転機1の電機子抵抗
L:交流回転機1の電機子インダクタンス
φf:交流回転機1の回転子磁束振幅
vq1*=R0×iq*+ωr×(L0×id*+φf0) ・・・(4)
φf0:交流回転機1の回転子磁束振幅設定値
ここでは、交流回転機1の回転子磁束振幅は既知であると仮定して説明する。この仮定が成り立つ場合、φf0=φfが成り立つ。なお、交流回転機1の回転子磁束振幅が未知である場合については後述する実施の形態5で説明する。
即ち、第2の電圧指令演算手段9では、減算器11の出力を比例積分によって増幅する増幅器13によって電流指令のd軸成分id*と電流のd軸成分idとが一致するとともに、減算器12の出力を比例積分によって増幅する増幅器14によって電流指令のq軸成分iq*と電流のq軸成分iqとが一致している。また、電圧印加手段2は、第3の電圧指令演算手段10が出力する第3の電圧指令vd3*およびvq3*に基づいて交流回転機1に電圧を印加しているので、交流回転機1の電圧のd軸成分vdおよびq軸成分vqは、第3の電圧指令vd3*およびvq3*に一致する。これらの関係を勘案すると(5)〜(10)式が成り立つ。
vq3*=vq2*+R0×iq*+ωr×(L0×id*+φf0)・・・(6)
id=id* ・・・(7)
iq=iq* ・・・(8)
vd=vd3* ・・・(9)
vq=vq3* ・・・(10)
vq2*=−(R0−R)×iq*−ωr×(L0−L)×id* ・・・(12)
÷(id*2+iq*2) ・・・(13)
(L0−L)=(vd2*×iq*−vq2*×id*)
÷{ωr×(id*2+iq*2)} ・・・(14)
(L0−L)=vd2*÷(ωr×iq*) ・・・(16)
・(電機子抵抗設定値R0)>(電機子抵抗R) の場合、vq2*<0
・(電機子抵抗設定値R0)<(電機子抵抗R) の場合、vq2*>0
従って、vq2*が正の場合、電機子抵抗設定値R0を大きくすると抵抗誤差(R0−R)は零に近づき、vq2*が負の場合、電機子抵抗設定値R0を小さくすると抵抗誤差(R0−R)は零に近づく。
・(電機子インダクタンス設定値L0)>(電機子インダクタンスL)の場合、
vd2*>0
・(電機子インダクタンス設定値L0)<(電機子インダクタンスL)の場合、
vd2*<0
従って、vd2*が正の場合、インダクタンス設定値L0を小さくするとインダクタンス誤差(L0−L)は零に近づき、vd2*が負の場合、インダクタンス設定値L0を大きくするとインダクタンス誤差(L0−L)は零に近づく。
L0=−kL∫(vd2*)dt ・・・(18)
但し、kR、kL:比例定数
時刻0〜1秒の期間は、停止した状態で電流指令id*およびiq*は零である。時刻1秒以降、iq*は正の一定値を保つと同時に、交流回転機1の角周波数ωrは加速して行く。定数測定手段8は、時刻3秒に到達するまでは動作を停止しており、時刻3秒に到達するとともに、(17)式により第2の電圧指令vq2*に基づいて電機子抵抗設定値R0を演算することで、R0は電機子抵抗Rに近づき抵抗誤差(R0−R)は零に収束する。
電機子インダクタンスについても、定数測定手段8は、時刻3秒に到達するとともに、(18)式により第2の電圧指令vd2*に基づいて電機子インダクタンス設定値L0を演算することで、L0は電機子インダクタンスLに近づきインダクタンス誤差(L0−L)は零に収束する。
従って、定数測定手段8は、角周波数ωの大きさが所定値よりも大きくなる時刻3秒以降で交流回転機1の電気的定数を演算し、任意の角周波数ωの大きさが所定値よりも小さい時刻3秒以前では電気的定数の演算を停止するようにしている。これにより、角周波数ωが小さく精度よく測定できない場合、定数誤差に起因する制御性能の低下を防ぐことができる。
また、本実施の形態1では定数測定手段8が、回転二軸座標(d−q軸)上の電流指令のd軸成分の大きさを零とし、q軸成分の大きさを一定に保ったときの第2の電圧指令演算手段9が出力する第2の電圧指令に基づいて交流回転機1の電気的定数を演算するので、電機子抵抗と電機子インダクタンスといった2種類の電気的定数の測定ができるという効果がある。
また、第2の電圧指令演算手段9が出力する第2の電圧指令に基づいて演算した交流回転機1の電機子インダクタンス設定値および電機子抵抗設定値を第1の電圧指令演算手段7に出力するので、該交流回転機1の制御装置の制御精度が向上するという効果がある。
更に、電機子抵抗や電機子インダクタンスの設定値を第2の電圧指令に基づいた積分演算から得るようにしたので、電圧検出値や電流検出値のノイズが直接反映することを防ぎ、測定した定数もノイズの影響を受ける問題を解決できるという効果がある。
先の実施の形態1では、定数測定手段8は、(17)、(18)式に従い、第2の電圧指令vd2*およびvq2*に基づいて交流回転機1の電機子抵抗設定値R0と電機子インダクタンス設定値L0とを演算していたが、この実施の形態2では、第2の電圧指令vd2*およびvq2*に加え、電流指令のq軸成分iq*および角周波数ωrを用いて電機子抵抗設定値R0と電機子インダクタンス設定値L0とを演算している。
実施の形態1に比較して構成、演算は多少複雑になるが、iq*およびωrの設定が任意となるので、その分、設定値R0、L0を測定するための運転条件の自由度が高まり適用が容易になるという利点がある。
(L0−L)=vd2*÷(ωr×iq*) ・・・(20)
また、(20)式右辺はvd2*の大きさに比例し、iq*の大きさに反比例するとともに、ωrの大きさに反比例する。換言すると、(20)式右辺は「vd2*÷(ωr×iq*)」に比例すると言っても良い。
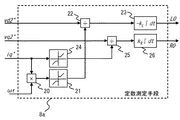
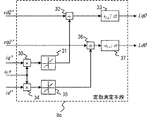
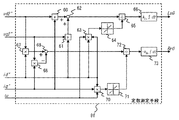
これらを勘案し、本実施の形態2に示す定数測定手段8aは、(21)、(22)式により第2の電圧指令vd2*およびvq2*に基づいて演算した交流回転機1の電機子抵抗設定値R0と電機子インダクタンス設定値L0とを第1の電圧指令演算手段7に出力する。
L0=−kL∫{vd2*÷(ωr×iq*)}dt ・・・(22)
但し、kR、kL:比例定数
除算器22は、第2の電圧指令のd軸成分vd2*をリミッタ21の出力で除算し、積分器23は、除算器22の出力値を積分して−kL倍し、電機子インダクタンス設定値L0として出力する。乗算器20、リミッタ21、除算器22、積分器23による一連の演算によって前記(22)式の演算を行うことができる。
除算器25は、第2の電圧指令のq軸成分vq2*をリミッタ24の出力で除算し、積分器26は、除算器25の出力値を積分してkR倍し、電機子抵抗設定値R0として出力する。
時刻0〜1秒の期間は、停止した状態で電流指令id*およびiq*は零である。時刻1秒以降、iq*は正の一定値を保つと同時に、交流回転機1の角周波数ωrは加速して行く。定数測定手段8は、時刻3秒に到達するまでは動作を停止しており、時刻3秒に到達するとともに、(21)式により第2の電圧指令vq2*に基づいて電機子抵抗設定値R0を演算することで、R0は電機子抵抗Rに近づき抵抗誤差(R0−R)は零に収束する。
ここで、図5を先の実施の形態1の図3と比較すると、インダクタンス誤差(L0−L)の収束性が向上している。実施の形態1では、インダクタンス設定値の演算は(18)式に基づいていたが、vd2*は角周波数ωrの大きさに比例するので、角周波数ωrが小さい場合はインダクタンス誤差(L0−L)があってもvd2*の値も小さく、インダクタンス誤差(L0−L)の収束性が悪かった。
本実施の形態2では(22)式に基づいてインダクタンス設定値の演算を行うようにしたので、インダクタンス誤差(L0−L)の収束性が向上した。同様に、iq*の大きさが変化する場合でも本実施の形態2に示した定数測定手段8aを用いればiq*の大きさに拘わらず抵抗誤差(R0−R)およびインダクタンス誤差(L0−L)の収束性を一定に保つことができ、適切な比例定数kR、kLを与えることによってそれぞれの収束性を向上させることができる。
また、電機子抵抗設定値および電機子インダクタンス設定値は、第2の電圧指令を電流指令で除算するようにしたので、電流指令の大きさに拘わらず抵抗誤差(R0−R)の収束性およびインダクタンス誤差(L0−L)の収束性が向上するという効果がある。
また、電機子インダクタンス設定値については、第2の電圧指令vd2*を角周波数ωrで除算した値に基づいて演算するようにしたので、角周波数ωrに拘わらずインダクタンス誤差(L0−L)の収束性が向上するという効果がある。
先の実施の形態1、2における交流回転機1は同期機であって、特に、表面磁石型の同期機の場合を扱った。本実施の形態3では、交流回転機1bは同期機であって、特に、埋め込み磁石型の同期機の場合について説明する。埋め込み磁石型同期機は、永久磁石を埋め込むため回転子の磁気回路形状が軸対称ではなく、いわゆる突極性を有するものとなる。
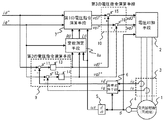
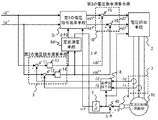
図6は、本発明の実施の形態3による構成を示すブロック図であり、交流回転機1bは同期機であって、埋め込み磁石型の同期機である。定数測定手段8bは、交流回転機1bの電機子インダクタンスのd軸成分設定値Ld0および交流回転機1bの電機子インダクタンスのq軸成分設定値Lq0を演算し、第1の電圧指令演算手段7bにLd0およびLq0を出力する。なお、図6において、図1と同一の符号を付したものは、同一またはこれに相当し、重複する部分の個々の説明は省略する。
vq=R×iq+ωr×(Ld×id+φf) ・・・(24)
Ld:交流回転機1の電機子インダクタンスのd軸成分
Lq:交流回転機1の電機子インダクタンスのq軸成分
一方、第1の電圧指令演算手段7bでは、回転二軸座標(d−q軸)上の電流指令id*およびiq*と角周波数ωrに基づいた(25)、(26)式によって回転二軸座標(d−q軸)上の第1の電圧指令vd1*およびvq1*を出力する。
vq1*=R0×iq*+ωr×(Ld0×id*+φf0) ・・・(26)
先の実施の形態1の場合と同様、動作が定常状態で、第2の電圧指令演算手段9の出力である第2の電圧指令演算値vd2*およびvq2*の絶対値が零に近い所定の範囲内になった時点では以下の動作が確認できる。
vq3*=vq2*+R0×iq*+ωr×(Ld0×id*+φf0)・・・(28)
id=id* ・・・(29)
iq=iq* ・・・(30)
vd=vd3* ・・・(31)
vq=vq3* ・・・(32)
vq2*=−ωr×(Ld0−Ld)×id* ・・・(34)
(Lq0−Lq)= vd2*÷(ωr×iq*) ・・・(36)
(35)式から、電機子インダクタンスのd軸成分について次のことが判る。
・(Ld0)<(Ld) の場合、vq2*<0
同様に、(36)式から電機子インダクタンスのq軸成分について次のことが判る。
・(Lq0)<(Lq) の場合、vd2*<0
Lq0=−kLq∫(vd2*)dt ・・・(38)
但し、kLd、kLq:比例定数
時刻0〜1秒の期間は、停止した状態で電流指令id*およびiq*は零である。時刻1秒以降、id*は負の一定値を保つと同時にiq*は正の一定値を保ち、交流回転機1bの角周波数ωrは発生したトルクによって加速して行く。定数測定手段8bは、時刻3秒に到達するまでは動作を停止しており、時刻3秒に到達すると、第2の電圧指令vq2*に基づいて電機子インダクタンス設定値のd軸成分Ld0を演算することで、Ld0は電機子インダクタンスのd軸成分Ldに近づき抵抗誤差(Ld0−L)は零に収束する。
電機子インダクタンスのq軸成分についても、定数測定手段8bは、時刻3秒に到達すると、第2の電圧指令vd2*に基づいて電機子インダクタンス設定値のq軸成分Lq0を演算することで、Lq0は電機子インダクタンスのq軸成分Lqに近づきq軸インダクタンス誤差(Lq0−Lq)は零に収束する。
また、交流回転機1bは突極性を有する同期機であって、第2の電圧指令演算手段9が出力する第2の電圧指令のd軸成分に基づいて演算した交流回転機1bのq軸インダクタンス値および第2の電圧指令のq軸成分に基づいて演算した交流回転機1bのd軸インダクタンス値を第1の電圧指令演算手段7bに出力するので、突極性を有する同期機のd軸インダクタンス値およびq軸インダクタンス値を定数測定手段8bが測定し、第1の電圧指令演算手段7bの電気的定数として設定することができるという効果を得る。
先の実施の形態3では、定数測定手段8bは、(37)、(38)式に従い、第2の電圧指令vd2*およびvq2*に基づいて交流回転機1bの電機子インダクタンス設定値のd軸成分Ld0およびq軸成分Lq0を演算していたが、第2の電圧指令vd2*、vq2*、電流指令のd軸成分id*、q軸成分iq*、および角周波数ωrに基づいて電機子インダクタンス設定値のd軸成分Ld0およびq軸成分Lq0を演算しても良い。
(Lq0−Lq)= vd2*÷(ωr×iq*) ・・・(40)
Lq0= kLq∫{vd2*÷(ωr×iq*)}dt ・・・(42)
但し、kLd、kLq:比例定数
除算器32は、第2の電圧指令のd軸成分vd2*をリミッタ31の出力で除算し、積分器33は、除算器32の値を積分してkLq倍し、電機子インダクタンス設定値のq軸成分Lq0として出力する。乗算器30、リミッタ31、除算器32、積分器33による一連の演算によって(42)式の演算を行うことができる。
除算器36は、第2の電圧指令のq軸成分vq2*をリミッタ35の出力で除算し、積分器37は、除算器36の値を積分してkLd倍し、電機子インダクタンス設定値のd軸成分Ld0として出力する。乗算器34、リミッタ35、除算器36、積分器37による一連の演算によって(41)式の演算を行うことができる。
また、第2の電圧指令vd2*を角周波数ωrで除算した値に基づいて演算するようにしたので、角周波数ωrに拘わらずd軸インダクタンス誤差(Ld0−Ld)およびq軸インダクタンス誤差(Lq0−Lq)の収束性が向上するという効果がある。
先の実施の形態例では、回転子磁束の振幅および位相は既知である場合について説明した。
即ち、回転子磁束の振幅が既知である場合とは、回転子磁束に関して、φf0=φfが成り立っている場合を指す。交流回転機単体試験などで回転機の誘起電圧定数を予め得ている場合などが該当する。
また、回転子磁束の位相が既知である場合とは、位置センサの絶対位置と回転子磁束との関係が一意に定まっている場合を指す。具体例としては、エンコーダなどの位置センサを取り付けるときに回転子磁束の位相を考慮して取り付け作業を行ったり、エンコーダ取り付け後に回転機単体試験などで誘起電圧と回転位置の関係を予め得ている場合などが該当する。
本実施の形態5では、交流回転機1bは同期機であって、特に、回転子磁束の振幅および位相が不明の場合について説明する。
vq=R×iq+ωr×(Ld×id+φf×cosΔθ) ・・・(44)
vq1*=R0×iq*+ωr×(Ld0×id*+φf0) ・・・(46)
即ち、第2の電圧指令演算手段9では、電流指令のd軸成分id*と電流のd軸成分idとが一致するとともに、電流指令のq軸成分iq*と電流のq軸成分iqとが一致している。また、電圧印加手段2は、第3の電圧指令演算手段10が出力する第3の電圧指令vd3*およびvq3*に基づいて交流回転機1bに電圧を印加しているので、交流回転機1bの電圧のd軸成分vdおよびq軸成分vqは、第3の電圧指令vd3*およびvq3*に一致する。これらの関係を勘案すると(47)〜(52)式が成り立つ。
vq3*=vq2*+R0×iq*+ωr×(Ld0×id*+φf0)
・・・(48)
id=id* ・・・(49)
iq=iq* ・・・(50)
vd=vd3* ・・・(51)
vq=vq3* ・・・(52)
−ωr×φf×sinΔθ ・・・(53)
vq2*=−ωr×(Ld0−Ld)×id*−(R0−R)×iq*
−ωr×(φf0+φf×cosΔθ) ・・・(54)
この場合、(53)、(54)式は(55)、(56)式となる。
vq2*=−φf0+φf×cosΔθ ・・・(56)
sinΔθ≒Δθ、cosΔθ≒1とし、(55)、(56)式を整理すると(57)、(58)式を得る。
(φf0−φf)=−vq2* ・・・(58)
・(回転直交座標のd軸位相)<(回転子磁束の位相) の場合、vd2*>0
同様に、上記(58)式から回転子磁束の振幅について次のことが判る。
・(φf0)<(φf) の場合、vq2*>0
φf0=−kφ∫(vq2*)dt ・・・(60)
但し、kθ、kφ:比例定数
時刻0〜1秒の期間は、停止した状態で電流指令id*およびiq*は零である。時刻1秒以降、id*は零を保つと同時にiq*は正の一定値を保ち、交流回転機1bの角周波数ωrは発生したトルクによって加速して行く。定数測定手段8dは、時刻6秒に到達するまでは動作を停止しておく。時刻6秒に到達すると、id*およびiq*は零を保ち、定数測定手段8dは、第2の電圧指令vd2*およびvq2*に基づいて位相差Δθおよび磁束振幅設定値φf0を演算することで、位相差Δθおよび磁束振幅誤差(φf0−φf)は零に収束する。
id*=iq*=0の条件を満足させておけば、RやLに起因する電圧降下が発生しないので、RやLが未知であってもφf0やΔθを得ることが可能となる。
先の各実施の形態における交流回転機は、同期機を扱った。本実施の形態6においては、交流回転機1eが誘導機である場合について説明する。
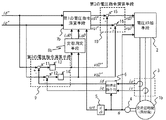
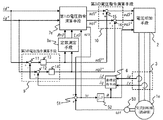
図12は、本発明の実施の形態6による構成を示すブロック図であり、交流回転機1eは誘導機である。なお、図12において、先の実施の形態例と同一の符号を付したものは、同一またはこれに相当するものであり、重複する部分の個々の説明は省略する。
定数測定手段8eは、交流回転機1eの電機子インダクタンス設定値Ls0および交流回転機1eの回転子抵抗設定値Rr0を演算し、第1の電圧指令演算手段7eにLs0およびRr0を出力する。
速度検出器50は、交流回転機1eの回転角周波数ωrを検出し、加算器51は回転角周波数ωrとすべり角周波数ωsとを加算して、角周波数ωを出力する。積分器52は、加算器51から得た角周波数ωを積分して位相θを出力する。
vq=Rs×iq+ω×σ×Ls×id+ω×M÷Lr×φdr ・・・(62)
φdr=M×Rr×(Rr×id+ωs×Lr×iq)
÷(Rr2+ωs2×Lr2) ・・・(63)
φqr=M×Rr×(Rr×iq−ωs×Lr×id)
÷(Rr2+ωs2×Lr2) ・・・(64)
Rs:交流回転機1eの電機子抵抗
Rr:交流回転機1eの回転子抵抗
Ls:交流回転機1eの電機子インダクタンス
M:交流回転機1eの相互インダクタンス
Lr:交流回転機1eの回転子インダクタンス
σ:交流回転機1eの漏れ係数
φdr:交流回転機1eの回転子磁束のd軸成分
φqr:交流回転機1eの回転子磁束のq軸成分
ωs:交流回転機1eのすべり角周波数
vq1*=Rs0×iq*+ω×Ls0×id* ・・・(66)
ωs=Rr0×iq*÷(Lr0×id*) ・・・(67)
Rs0:交流回転機1eの電機子抵抗設定値
Rr0:交流回転機1eの回転子抵抗設定値
Ls0:交流回転機1eの電機子インダクタンス設定値
Lr0:交流回転機1eの回転子インダクタンス設定値
σ0:交流回転機1eの漏れ係数設定値
先の実施の形態1の場合と同様、動作が定常状態で、第2の電圧指令演算手段9の出力である第2の電圧指令演算値vd2*およびvq2*の絶対値が零に近い所定の範囲内になった時点では以下の動作が確認できる。
vq3*=vq2*+Rs0×iq*+ω×Ls0×id* ・・・(69)
id=id* ・・・(70)
iq=iq* ・・・(71)
vd=vd3* ・・・(72)
vq=vq3* ・・・(73)
×(Ls0−Ls)×iq* ・・・(74)
vq2*≒−ω×id*2÷(id*2+iq*2)
×(Ls0−Ls)×id* ・・・(75)
×(Rr0−Rr)×id* ・・・・・・・・(76)
vq2*≒−ω×Lr0×id*×iq*÷{(id*2+iq*2)×Rr0}
×(Rr0−Rr)×iq* ・・・・・・・・(77)
+ω×Lr0×id*×iq*÷{(id*2+iq*2)×Rr0}
×(Rr0−Rr)×id* ・・・(78)
vq2*≒−ω×id*2÷(id*2+iq*2)×(Ls0−Ls)×id*
−ω×Lr0×id*×iq*÷{(id*2+iq*2)×Rr0}
×(Rr0−Rr)×iq* ・・・(79)
・・・(80)
Rr0−Rr≒(vd2*×id*−vq2*×iq*)×Rr0
÷(ω×Ls0×id*×iq*) ・・・(81)
・・・(82)
Rr0−Rr≒(vd2*−vq2*)×Rr0÷(ω×Ls0×I1*)
・・・(83)
・(Ls0)<(Ls) の場合、(vd2*+vq2*)>0
・(Rr0)<(Rr) の場合、(vd2*−vq2*)<0
Rr0=−kRr∫(vd2*−vq2*)dt ・・・(85)
但し、kLs、kRr:比例定数
時刻0〜1秒の期間は、停止した状態でid*はI1*、iq*は零である。時刻1秒以降、id*とiq*の大きさはI1*を保ち、交流回転機1eの回転角周波数ωrは発生したトルクによって加速して行く。
定数測定手段8eは、時刻3秒に到達するまでは動作を停止しており、時刻3秒に到達すると、第2の電圧指令vd2*およびvq2*に基づいて電機子インダクタンス設定値Ls0を演算することで、Ls0は電機子インダクタンスLsに近づきインダクタンス誤差(Ls0−Ls)は零に収束する。
回転子抵抗についても、定数測定手段8eは、時刻3秒に到達すると、第2の電圧指令vd2*およびvq2*に基づいて回転子抵抗設定値Rr0を演算することで、Rr0は回転子抵抗Rrに近づき回転子抵抗誤差(Rr0−Rr)は零に収束する。
なお、本実施の形態6に示した定数測定手段8eは、電機子インダクタンス設定値Ls0の演算を行ったが、誘導機である交流回転機1eにはLs≒Lr≒Mの関係があるので、定数測定手段8eはLs0の代わりに回転子インダクタンス若しくは相互インダクタンスの設定値を演算しても良い。
また、交流回転機1eは誘導機であって、定数測定手段8eは、相互インダクタンス値、電機子インダクタンス値、回転子抵抗値を第2の電圧指令に基づいて演算し第1の電圧指令演算手段7eに出力するので、誘導機の、電機子インダクタンス値と回転子抵抗値を定数測定手段8eが測定し、第1の電圧指令演算手段7eで用いる電気的定数として設定することができる。
また、定数測定手段8eは、第2の電圧指令演算手段9が出力する第2の電圧指令のd軸成分とq軸成分との差に基づいて回転子抵抗値を演算し、その演算結果を第1の電圧指令演算手段7eに出力するので、誘導機である交流回転機1eの回転子抵抗を正確に測定し、第1の電圧指令演算手段7eで用いる電気的定数の設定を行えるという効果がある。
先の実施の形態6では、定数測定手段8eは(84)、(85)式に従い、第2の電圧指令vd2*およびvq2*に基づいて交流回転機1eの電機子インダクタンス設定値Ls0と回転子抵抗設定値Rr0とを演算していたが、第2の電圧指令vd2*、vq2*、電流指令id*、iq*および角周波数ωに基づいて電機子インダクタンス設定値Ls0と回転子抵抗設定値Rr0とを演算しても良い。
・・・(86)
Rr0−Rr≒(vd2*×id*−vq2*×iq*)×Rr0
÷(ω×Ls0×id*×iq*) ・・・(87)
また、(87)式右辺は、(vd2*×iq*−vq2*×id*)の大きさに比例し、(id*×iq*)の大きさに反比例するとともに、ωの大きさに反比例する。
これらを勘案し、本実施の形態7に示す定数測定手段8fは、(88)、(89)式に基づいて交流回転機1eの電機子インダクタンス設定値Ls0と回転子抵抗設定値Rr0とを第1の電圧指令演算手段7eに出力する。
÷(ω×id*2)}dt ・・・(88)
Rr0=−kRr∫{(vd2*×id*−vq2*×iq*)
÷(ω×id*×iq*)}dt ・・・(89)
但し、kLs、kRr:比例定数
先の実施の形態7では、電流指令のd軸成分id*を所定値で与えていたが、角周波数ωが基準角周波数ωBASE(電圧飽和が発生しない最大角周波数)であるときに電圧印加手段2が出力可能な最大電圧振幅になるようにid*を調整しても良い。
交流回転機1eの電圧振幅を大きくすることができれば、同じ出力に対して電流振幅を小さくすることができ、銅損などの損失低減による高効率制御が可能になる。しかし、電圧印加手段2が出力できないような電圧振幅に制御しようとすると電圧飽和が発生し、所望の制御特性が得られない。そこで、電圧印加手段2の出力する角周波数が基準角周波数ωBASEであるときに出力可能な最大電圧振幅になるようにid*の調整をすることで、角周波数ωが基準角周波数ωBASE以下では電圧飽和が発生しない範囲で電圧振幅が大きくなるようにする。
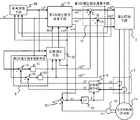
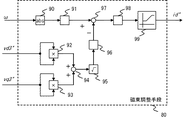
図16は、本発明の実施の形態8による構成を示すブロック図であり、磁束調整手段80は、電圧印加手段2に入力される第3の電圧指令vd3*,vq3*および角周波数ωに基づいて電流指令のd軸成分id*を出力する。公知の通り、交流回転機1eの磁束振幅は、電流指令のd軸成分id*に比例するので、id*を調整することは交流回転機1eの磁束を調整することでもある。なお、図16において図14と同一の符号を付したものは、同一またはこれに相当するものであり、重複部分の個々の説明は省略する。
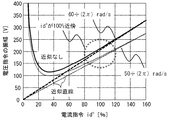
図17は、角周波数50÷2π[rad/s]および60÷2π[rad/s]における電流指令id*と電圧指令の振幅との関係を示す図であり、電圧指令の振幅は(90)式で定義する。
図18は、角周波数ωと電圧指令の振幅との関係を示す図であり、id*が50〜200%の範囲であれば、角周波数ωと電圧指令の振幅との関係は概ね比例関係であると言っても良い。特に、基準角周波数ωBASEを60×2π[rad/s]に設定する場合、電流指令のd軸成分id*が50〜200%、かつ、角周波数ωが基準角周波数ωBASE近傍では、角周波数ωと電圧指令の振幅とは比例関係にあり、また、id*と電圧指令の振幅とも比例関係にあると言っても良い。換言すると、次の関係が成り立つ。
但し、電流指令のd軸成分id*は、100%近傍、かつ、角周波数ωは、ωBASE近傍とする。
加算器94は、乗算器92の出力と乗算器93の出力との加算演算を行い、平方演算器95は、加算器94の平方を演算し、ゲイン演算器96は、平方演算器95の出力を1/VBASE倍する。ここで、VBASEは電圧印加手段2が出力可能な最大電圧振幅である。
減算器97は、ゲイン演算器91の出力からゲイン演算器96の出力を減算し、増幅器98は、減算器97の出力を積分若しくは比例積分によって増幅する。この比例積分によって「絶対値演算器90の出力の1/ωBASE倍」と「平方演算器95の出力の1/VBASE倍」とを一致させることが可能であり、その結果、角周波数ωがωBASEであるときに電圧指令の振幅がVBASEになるような電流指令のd軸成分id*を出力できる。リミッタ99は、増幅器98の出力がid*の50〜200%になるように上限と下限をリミットする。
定数測定手段として機能する磁束調整手段80を図19の構成にすることにより、角周波数ωがωBASEであるときに電圧指令の振幅がVBASEになるような電流指令のd軸成分id*を出力することができる。
時刻0〜1秒の期間は、停止した状態でid*はI1*、iq*は零である。時刻1秒以降、id*とiq*の大きさはI1*を保ち、交流回転機1eの回転角周波数ωrは発生したトルクによって加速して行く。定数測定手段8fは、時刻3秒に到達するまでは動作を停止しており、時刻3秒に到達すると、第2の電圧指令vd2*およびvq2*に基づいて電機子インダクタンス設定値Ls0を演算することで、Ls0は電機子インダクタンスLsに近づき電機子インダクタンス誤差(Ls0−Ls)は零に収束する。
磁束調整手段80は、時刻8秒に到達するまでは動作を停止している。I1*に保たれている電流指令のd軸成分id*は100%近傍であり、かつ、時刻8秒に到達した時点で角周波数ωはωBASE近傍となるので、時刻8秒から磁束調整手段80は動作を開始し、角周波数ωがωBASEであるときに電圧印加手段2が出力可能な最大電圧振幅VBASEになるようなid*の調整ができる。
(前記交流回転機の角周波数)/前記ωBASE=(第3の電圧指令の振幅)/VBASEが成立するよう、電流指令のd軸成分を演算する磁束調整手段を備えたので、電圧飽和が発生しない範囲で電圧振幅が大きくなるようにできるので、交流回転機を安定かつ効率良く制御することができる。
4 回転位置検出器、6 座標変換手段、
7,7b,7c,7e 第1の電圧指令演算手段、
8,8a,8b,8c,8d,8e,8f 定数測定手段、
9 第2の電圧指令演算手段、10 第3の電圧指令演算手段、80 磁束調整手段。
Claims (19)
- 交流回転機の角周波数で回転する回転二軸座標(以下、d−q軸と称す)上の電流指令に基づき前記交流回転機を駆動する交流回転機の制御装置を使用して前記交流回転機の電気的定数を測定する方法であって、
前記交流回転機の制御装置は、
前記交流回転機の電流を検出する電流検出手段、前記電流検出手段からの電流検出値を前記d−q軸上の電流検出値に変換する座標変換手段、前記d−q軸上の電流指令と前記角周波数と前記交流回転機の複数の電気的定数との関係式から前記d−q軸上の第1の電圧指令を演算する第1の電圧指令演算手段、前記d−q軸上の電流指令と前記d−q軸上の電流検出値との差分電流が零に収斂するよう前記差分電流に基づき前記d−q軸上の第2の電圧指令を演算する第2の電圧指令演算手段、前記d−q軸上の第1の電圧指令と前記d−q軸上の第2の電圧指令とを加算して前記d−q軸上の第3の電圧指令を演算する第3の電圧指令演算手段、および前記d−q軸上の第3の電圧指令に基づき前記交流回転機に電圧を印加する電圧印加手段を備え、
更に、前記第1の電圧指令演算手段は、その前記複数の電気的定数の少なくとも1つを外部から入力する定数設定値で設定するようにし、
前記定数設定値を、前記第2の電圧指令演算手段からの第2の電圧指令を、もしくは前記第2の電圧指令演算手段からの第2の電圧指令を前記回転二軸座標上の電流指令で除算する演算式により演算した結果を、更に積分し該積分した値に比例定数を乗算する処理を行った結果を前記定数設定値として出力する定数測定手段を備えた交流回転機の制御装置を使用し、
前記電流指令および前記角周波数を所定の値または範囲に設定して前記制御装置を起動し、前記第2の電圧指令が所定の範囲内となった時点における前記定数測定手段からの前記定数設定値を、測定対象である前記交流回転機の電気的定数として出力する交流回転機の電気的定数測定方法。 - 前記定数測定手段は、前記定数設定値を、前記第2の電圧指令演算手段からの第2の電圧指令、前記電流指令および前記角周波数に基づき演算することを特徴とする請求項1記載の交流回転機の電気的定数測定方法。
- 前記交流回転機は同期機であって、
前記定数測定手段は、前記第2の電圧指令のq軸成分に基づき、前記定数設定値としての電機子抵抗設定値を演算することを特徴とする請求項1記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は同期機であって、
前記定数測定手段は、前記第2の電圧指令のd軸成分に基づき、前記定数設定値としての電機子インダクタンス設定値を演算することを特徴とする請求項1記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は同期機であって、
前記定数測定手段は、前記第2の電圧指令のq軸成分と前記電流指令のq軸成分とに基づき、前記定数設定値としての電機子抵抗設定値を演算することを特徴とする請求項2記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は同期機であって、
前記定数測定手段は、前記第2の電圧指令のd軸成分と前記電流指令のq軸成分と前記角周波数とに基づき、前記定数設定値としての電機子インダクタンス設定値を演算することを特徴とする請求項2記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は突極性を有する同期機であって、
前記定数測定手段は、前記第2の電圧指令のq軸成分に基づき、前記定数設定値としての電機子インダクタンスのd軸成分設定値を演算することを特徴とする請求項1記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は突極性を有する同期機であって、
前記定数測定手段は、前記第2の電圧指令のd軸成分に基づき、前記定数設定値としての電機子インダクタンスのq軸成分設定値を演算することを特徴とする請求項1記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は突極性を有する同期機であって、
前記定数測定手段は、前記第2の電圧指令のq軸成分と前記電流指令のd軸成分と前記角周波数とに基づき、前記定数設定値としての電機子インダクタンスのd軸成分設定値を演算することを特徴とする請求項2記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は突極性を有する同期機であって、
前記定数測定手段は、前記第2の電圧指令のd軸成分と前記電流指令のq軸成分と前記角周波数とに基づき、前記定数設定値としての電機子インダクタンスのq軸成分設定値を演算することを特徴とする請求項2記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は同期機であって、
前記定数測定手段は、前記第2の電圧指令のd軸成分に基づき、前記d−q軸のd軸と前記交流回転機の回転子磁束との位相差を演算し、更に、前記位相差と前記交流回転機の回転位置検出値とに基づき、前記定数設定値としての前記交流回転機の角周波数設定値を演算することを特徴とする請求項1記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は同期機であって、
前記定数測定手段は、前記第2の電圧指令のq軸成分に基づき、前記定数設定値としての前記交流回転機の磁束振幅設定値を演算することを特徴とする請求項1記載の交流回転機の電気的定数測定方法。 - 前記交流回転機は誘導機であって、
前記第1の電圧指令演算手段は、前記d−q軸上の電流指令と前記電気的定数とに基づき、前記交流回転機のすべり角周波数を演算し、
前記すべり角周波数と前記交流回転機の角周波数検出値とから前記交流回転機の角周波数を演算する加算器を備えたことを特徴とする請求項1記載の交流回転機の電気的定数測定方法。 - 前記定数測定手段は、前記第2の電圧指令のd軸成分とq軸成分との和に基づき、前記定数設定値としての電機子インダクタンス設定値、回転子インダクタンス設定値または相互インダクタンス設定値のいずれかを演算することを特徴とする請求項13記載の交流回転機の電気的定数測定方法。
- 前記定数測定手段は、前記第2の電圧指令のd軸成分とq軸成分との差に基づき、前記定数設定値としての回転子抵抗設定値を演算することを特徴とする請求項13記載の交流回転機の電気的定数測定方法。
- 前記定数測定手段は、前記定数設定値を、前記第2の電圧指令演算手段からの第2の電圧指令、前記電流指令および前記角周波数に基づき演算することを特徴とする請求項13記載の交流回転機の電気的定数測定方法。
- 前記定数測定手段は、前記角周波数が所定値以上の範囲にある場合のみ前記定数設定値を演算し、前記角周波数が前記所定値未満の範囲では前記定数設定値の演算を停止するようにしたことを特徴とする請求項1ないし16のいずれかに記載の交流回転機の電気的定数測定方法。
- 電圧飽和が発生しない最大角周波数をωBASE、前記電圧印加手段が出力可能な最大電圧振幅をVBASEとしたとき、
前記第3の電圧指令と前記角周波数とに基づき、
(前記交流回転機の角周波数)/前記ωBASE=(第3の電圧指令の振幅)/VBASE
が成立するよう、前記電流指令のd軸成分を演算する磁束調整手段を備えたことを特徴とする請求項1ないし17のいずれかに記載の交流回転機の電気的定数測定方法。 - 請求項1ないし18のいずれかに記載の交流回転機の電気的定数測定方法の実施に使用する交流回転機の制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007017800A JP4519864B2 (ja) | 2007-01-29 | 2007-01-29 | 交流回転機の電気的定数測定方法およびこの測定方法の実施に使用する交流回転機の制御装置 |
| US11/851,797 US7800337B2 (en) | 2007-01-29 | 2007-09-07 | Control apparatus for AC rotary machine and method for measuring electrical constant of AC rotary machine using the control apparatus |
| KR1020070096346A KR101046802B1 (ko) | 2007-01-29 | 2007-09-21 | 교류 회전기의 제어 장치 및 이 제어 장치를 사용한 교류회전기의 전기적 정수 측정 방법 |
| CN2007101618482A CN101237213B (zh) | 2007-01-29 | 2007-09-24 | 交流旋转机的控制装置及使用该控制装置的交流旋转机的电常数测定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007017800A JP4519864B2 (ja) | 2007-01-29 | 2007-01-29 | 交流回転機の電気的定数測定方法およびこの測定方法の実施に使用する交流回転機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008187797A JP2008187797A (ja) | 2008-08-14 |
| JP4519864B2 true JP4519864B2 (ja) | 2010-08-04 |
Family
ID=39667202
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007017800A Expired - Fee Related JP4519864B2 (ja) | 2007-01-29 | 2007-01-29 | 交流回転機の電気的定数測定方法およびこの測定方法の実施に使用する交流回転機の制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7800337B2 (ja) |
| JP (1) | JP4519864B2 (ja) |
| KR (1) | KR101046802B1 (ja) |
| CN (1) | CN101237213B (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2654432C (en) * | 2006-06-29 | 2012-06-05 | Mitsubishi Electric Corporation | Control apparatus for ac rotary machine |
| JP4301336B2 (ja) * | 2007-10-24 | 2009-07-22 | ダイキン工業株式会社 | 電力変換装置 |
| DE102008025408A1 (de) * | 2008-05-27 | 2009-12-03 | Sew-Eurodrive Gmbh & Co. Kg | Steuer- oder Regelverfahren für einen Umrichter |
| JP5178768B2 (ja) * | 2010-04-06 | 2013-04-10 | 三菱電機株式会社 | 交流回転機の制御装置及び電動パワーステアリングの制御装置 |
| JP5656775B2 (ja) * | 2011-08-31 | 2015-01-21 | 日立オートモティブシステムズ株式会社 | 電力変換装置 |
| KR101221748B1 (ko) | 2011-10-27 | 2013-01-11 | 엘에스산전 주식회사 | 유도 전동기의 회전자 시정수 추정장치 |
| CN103858334B (zh) * | 2011-11-17 | 2016-09-07 | 三菱电机株式会社 | 交流旋转电机控制装置及具备交流旋转电机控制装置的电动助力转向装置 |
| WO2013080292A1 (ja) * | 2011-11-29 | 2013-06-06 | 三菱電機株式会社 | 回転機の制御装置および回転機のインダクタンス測定方法 |
| CN103852640B (zh) * | 2012-12-04 | 2016-05-04 | 中国北车股份有限公司 | 电网电压相位计算方法、装置及单相脉冲宽度调制整流器 |
| WO2015068258A1 (ja) * | 2013-11-08 | 2015-05-14 | 三菱電機株式会社 | 交流回転機の制御装置 |
| US9923505B2 (en) * | 2013-11-26 | 2018-03-20 | Regal Beloit America, Inc. | Methods and systems for controlling an electric motor |
| US10044310B2 (en) | 2015-03-16 | 2018-08-07 | Deere & Company | Methods of auto tuning machine parameters and systems thereof |
| CN105024613A (zh) * | 2015-06-26 | 2015-11-04 | 广东美的制冷设备有限公司 | 电机离线电阻值的获取方法、控制器和空调器 |
| KR102036031B1 (ko) * | 2017-03-06 | 2019-10-25 | 엘에스산전 주식회사 | 인버터 제어장치 |
| DE112018006842T5 (de) * | 2018-01-12 | 2020-10-15 | Mitsubishi Electric Corporation | Steuereinrichtung für eine Rotationsmaschine |
| JP7029368B2 (ja) * | 2018-09-06 | 2022-03-03 | 株式会社日立産機システム | 同期電動機制御装置 |
| KR102226076B1 (ko) * | 2019-03-26 | 2021-03-09 | 엘에스일렉트릭(주) | 전동기 구동 시스템 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001251889A (ja) * | 2000-03-06 | 2001-09-14 | Hitachi Ltd | 同期モータの回転子位置推定方法、位置センサレス制御方法及び制御装置 |
| JP2004297966A (ja) * | 2003-03-28 | 2004-10-21 | Hitachi Ltd | 交流電動機の制御装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0319653A (ja) | 1989-06-15 | 1991-01-28 | Matsushita Electric Ind Co Ltd | アイスクリーム製造装置 |
| JPH05103471A (ja) * | 1991-10-03 | 1993-04-23 | Toshiba Corp | インバータ制御方法 |
| DE69306703T2 (de) * | 1992-09-16 | 1997-04-30 | Hitachi Ltd | Verfahren zur Messung charakteristischer Konstanten für Wechselstrommotoren und auf diesem Verfahren basierender Regler |
| JP3019653B2 (ja) | 1993-03-12 | 2000-03-13 | 株式会社日立製作所 | 交流電動機の制御装置及び交流電動機の定数測定方法 |
| JP3196390B2 (ja) * | 1992-12-25 | 2001-08-06 | 富士電機株式会社 | パラメータ同定器 |
| JP3166525B2 (ja) * | 1994-12-28 | 2001-05-14 | 三菱電機株式会社 | 誘導電動機のベクトル制御装置 |
| JP3468459B2 (ja) | 1999-09-01 | 2003-11-17 | 東洋電機製造株式会社 | 永久磁石形同期電動機の制御装置 |
| JP3520002B2 (ja) * | 1999-12-08 | 2004-04-19 | 三菱電機株式会社 | 誘導電動機のベクトル制御装置 |
| JP2002171797A (ja) | 2000-11-29 | 2002-06-14 | Toyo Electric Mfg Co Ltd | 永久磁石型同期電動機の制御装置 |
| KR100428505B1 (ko) * | 2001-07-06 | 2004-04-28 | 삼성전자주식회사 | 유도전동기의 속도 및 회전자 자속 추정방법 |
| CN100422758C (zh) | 2003-06-06 | 2008-10-01 | 三菱电机株式会社 | 旋转机的常数测定装置 |
| GB2413905B (en) * | 2004-05-05 | 2006-05-03 | Imra Europ S A S Uk Res Ct | Permanent magnet synchronous motor and controller therefor |
| EP1780886B1 (en) | 2004-07-21 | 2011-06-15 | Mitsubishi Denki Kabushiki Kaisha | Ac rotary machine constant measuring apparatus |
| JP4475528B2 (ja) * | 2005-03-17 | 2010-06-09 | 日立アプライアンス株式会社 | 同期電動機の制御装置及びその調整方法 |
-
2007
- 2007-01-29 JP JP2007017800A patent/JP4519864B2/ja not_active Expired - Fee Related
- 2007-09-07 US US11/851,797 patent/US7800337B2/en not_active Expired - Fee Related
- 2007-09-21 KR KR1020070096346A patent/KR101046802B1/ko active IP Right Grant
- 2007-09-24 CN CN2007101618482A patent/CN101237213B/zh not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001251889A (ja) * | 2000-03-06 | 2001-09-14 | Hitachi Ltd | 同期モータの回転子位置推定方法、位置センサレス制御方法及び制御装置 |
| JP2004297966A (ja) * | 2003-03-28 | 2004-10-21 | Hitachi Ltd | 交流電動機の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008187797A (ja) | 2008-08-14 |
| US7800337B2 (en) | 2010-09-21 |
| CN101237213A (zh) | 2008-08-06 |
| KR20080071055A (ko) | 2008-08-01 |
| US20080180054A1 (en) | 2008-07-31 |
| CN101237213B (zh) | 2010-11-03 |
| KR101046802B1 (ko) | 2011-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4519864B2 (ja) | 交流回転機の電気的定数測定方法およびこの測定方法の実施に使用する交流回転機の制御装置 | |
| JP5324159B2 (ja) | モータ制御装置 | |
| JP5130031B2 (ja) | 永久磁石モータの位置センサレス制御装置 | |
| KR102108911B1 (ko) | 드라이브 시스템 및 인버터 장치 | |
| WO2016121237A1 (ja) | インバータ制御装置及びモータ駆動システム | |
| US10637381B2 (en) | Inverter control device and drive system | |
| JP5709932B2 (ja) | 同期機制御装置 | |
| JP3707528B2 (ja) | 交流電動機の制御方法およびその制御装置 | |
| JP2010035363A (ja) | 永久磁石形同期電動機の制御装置 | |
| JP2004032907A (ja) | 永久磁石式同期モータの制御装置 | |
| JP5648310B2 (ja) | 同期モータの制御装置、及び同期モータの制御方法 | |
| JP3914107B2 (ja) | Dcブラシレスモータの制御装置 | |
| JP2010035352A (ja) | 同期電動機のロータ位置推定装置 | |
| JP2008206330A (ja) | 同期電動機の磁極位置推定装置および磁極位置推定方法 | |
| JP2010166638A (ja) | 回転電機の制御装置 | |
| JP2004266885A (ja) | 電動機制御装置および制御逸脱検出方法 | |
| JP7304891B2 (ja) | 回転機の制御装置および電動車両の制御装置 | |
| JP2006230200A (ja) | 交流電動機の制御装置 | |
| JP2006158046A (ja) | 交流電動機のセンサレス制御方法および装置 | |
| JP2011239518A (ja) | ステッピングモータの回転子の位置及び速度を推定する方法及び装置 | |
| JP6591794B2 (ja) | 誘導機の電力変換装置と二次時定数測定方法及び速度制御方法 | |
| JP7251424B2 (ja) | インバータ装置及びインバータ装置の制御方法 | |
| JP2009165333A (ja) | 同期電動機の制御装置 | |
| JP5854057B2 (ja) | 脱調検出装置および電動機駆動システム | |
| JP7226211B2 (ja) | インバータ装置及びインバータ装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090217 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091110 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100518 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100519 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130528 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4519864 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140528 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |