JP4510913B2 - 車両のシートベルト装置 - Google Patents
車両のシートベルト装置 Download PDFInfo
- Publication number
- JP4510913B2 JP4510913B2 JP2008322381A JP2008322381A JP4510913B2 JP 4510913 B2 JP4510913 B2 JP 4510913B2 JP 2008322381 A JP2008322381 A JP 2008322381A JP 2008322381 A JP2008322381 A JP 2008322381A JP 4510913 B2 JP4510913 B2 JP 4510913B2
- Authority
- JP
- Japan
- Prior art keywords
- lock
- belt reel
- vehicle
- drive motor
- webbing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 55
- 238000004804 winding Methods 0.000 claims description 16
- 238000001514 detection method Methods 0.000 claims description 15
- 230000008859 change Effects 0.000 claims description 14
- 230000001133 acceleration Effects 0.000 description 43
- 210000000078 claw Anatomy 0.000 description 21
- 238000000034 method Methods 0.000 description 19
- 230000008569 process Effects 0.000 description 19
- 230000002093 peripheral effect Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 230000000452 restraining effect Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R22/00—Safety belts or body harnesses in vehicles
- B60R22/32—Devices for releasing in an emergency, e.g. after an accident ; Remote or automatic unbuckling devices
- B60R22/321—Devices for releasing in an emergency, e.g. after an accident ; Remote or automatic unbuckling devices using electric means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R2021/01204—Actuation parameters of safety arrangents
- B60R2021/01252—Devices other than bags
- B60R2021/01265—Seat belts
- B60R2021/01272—Belt tensioners
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0132—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to vehicle motion parameters, e.g. to vehicle longitudinal or transversal deceleration or speed value
- B60R2021/01327—Angular velocity or angular acceleration
Description
このため、車両挙動が不安定になって緊急作動部が作動すると、ロック作動ドラムが制動され、ウェビングが引き出されようとしたときに、ベルトリールとロック作動ドラムが一方向に相対回転する。これにより、ロック爪がケーシングのロック溝と噛合し、その結果、ベルトリールのウェビング引き出し方向の回転がロックされる。
また、緊急ロック機構がロック作動した後に、ウェビングの引き出し方向の力が無くなりベルトリールが戻しばねの力によって巻取り方向に回転すると、ベルトリールとロック作動ドラムが他方向に所定量相対回転したところで、ロック爪とロック溝の噛合が自動的に解除される。
すなわち、車両が安定状態に戻ったときに、締め込みによる乗員からの反力が大きく、戻しばねによる自動的なロック解除ができない場合。
この場合には、ウェビングのロックが自動的には外れないため、乗員が一度バックルを外さなければならない。
この場合には、本来、ウェビングによる拘束がない方が快適な運転を行うことができるのにも拘わらず不要な拘束力が乗員に作用するため、乗員に不快感や操作のし難さを感じさせる。
これにより、駆動モータが非通電状態のときに、緊急ロック機構がロック作動する車両の不安定挙動が車両状態検出手段によって検出され、そのときからのベルトリールの回転位置の変化が回転位置検出手段によって検出される。このとき、緊急ロック機構がベルトリールの引き出し方向の回転を機械的にロックしているときには、ベルトリールの巻取り方向の回転が検出されることはあっても、引き出し方向の回転が検出されることはない。したがって、ロック状態の継続は、車両状態検出手段と回転位置検出手段の信号に基づいて判定することができる。本来ロック状態が継続されているはずのない所定時間以上ロック継続判定手段によってロック状態の継続判定が続く場合には、制御手段が駆動モータを回転駆動することで緊急ロック機構によるロックが強制的に解除される。
また、ロック解除のための駆動モータの駆動開始時間は、ロック継続判定中の走行状態に応じて調整され、例えば、連続したカーブを走行しているときに、ロック継続判定中の走行速度が高い場合には、駆動モータのロック解除のための駆動開始時間を遅らせる。これにより、連続したカーブを高速で走行した場合にも、緊急ロック機構が頻繁に作動と解除を繰り返す可能性が少なくなる。
また、請求項1に記載の発明によれば、ロック解除のための駆動モータの駆動開始時間を、ロック継続判定中の車両の走行速度に応じて調整するため、緊急ロック機構の作動と解除の頻繁な繰り返しを抑制することができる。したがって、この発明によれば、乗員に与える不快感や違和感をより少なくすることができる。
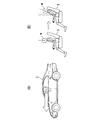
ケーシング14には一対の側壁14A,14Bが設けられ、一方の側壁14Aには、前述した動力伝達機構13と、戻しばねを収容する図示しないスプリングケースとが取り付けられ、他方の側壁14Bには、後述するロック作動ドラム23を支持するリテーナ24が取り付けられている。また、両側の側壁14A,14Bには、略円形の孔25が設けられ、その各孔25の内周に、ウェビング巻取り方向に傾斜したロック溝26が形成されている。
こうして、係止爪36がクラッチ歯32に噛合されると、ロック作動ドラム23の回転がロックする。したがって、この状態でウェビング5が引き出されようとすると、ベルトリール12とロック作動ドラム23が相対回転し、その結果、ベルトリール12のロック爪28がケーシング14のロック溝26に噛合し、ベルトリール12のウェビング引き出し方向の回転をロックする。以下、このロック系を車体感応ロック系と呼ぶ。
この参考例の場合、コントローラ21は、緊急ロック機構22がロック作動する車両状態になった後に、ロック継続判定手段41によるロック継続の判定が所定時間以上つづいたときに、ベルトリール12をウェビング巻取り方向に所定量以上回転させるように駆動モータ10を制御する。
この参考例による制御は、図4に示すような急加速時の状況や、図6に示すような凹凸路走行時の状況を想定している。
同図に示すように車両の加速が終了した後にも、以下の(a),(b)のような特殊な状況下では緊急ロック機構22(ELR)がロックしたままとなり易い。
(a)車両の加速が終了した後に、ウェビング5に乗員mの上体荷重等が加わり、戻しばねに抗する張力がウェビング5に作用し続けているとき。
(b)車両の加速が終了した後に、ウェビング5による乗員の締め込みが強く、戻しばねの力でベルトリール12をウェビング巻き取り方向に回転させることができないとき。
したがって、このような状況では、ロック状態が所定時間以上つづいたときに駆動モータ10によって強制的にロック解除を行う。
図7は、このような状況でのベルトリール12の回転位置の変化を示している。
同図に示すように凹凸走行を終了した後にも、上記の(a),(b)のような特殊な状況下では緊急ロック機構22(ELR)がロックしたままとなり易い。
この場合も、ロック状態が所定時間以上つづいたときに駆動モータ10によって強制的にロック解除を行う。
ステップS101においては、ベルトリール12の回転位置と、車両の前後加速度や横加速度を読み込む。
次の、ステップS102においては、車両の加速度が緊急ロック機構22のロック作動閾値を超えるか否かを判定し、YESの場合には、ステップS103に進み、NOの場合には、ステップS101に戻る。つまり、ここでは、緊急ロック機構22の作動の有無を判定する。
ステップS104において、YESの場合には、ステップS101に戻り、NOの場合には、ステップS105に進む。
ステップS105においては、ベルトリール12のウェビング引き出し方向の回転なしとの判定が所定時間以上継続したか否かを判定し、ここでYESの場合には、次のステップS106に進み、NOの場合には、ステップS104に戻る。
ステップS107でYESの場合には、リターンし、NOの場合には、ステップS106へと戻る。つまり、ここではベルトリール12が所定量以上回転してロックが解除されるまで駆動モータ10の通電がつづけられる。ただし、所定時間駆動モータ10の通電がつづけられても、ベルトリール12が所定量以上回転しないときには警告を出して駆動モータの通電を停止する。
なお、ステップS107でYESの場合には、さらに、ベルトリール12が引き出し方向に所定量以上回転したか否かを確認し、所定量以上回転していない場合に、駆動モータ10による巻取りを再度行うようにしても良い。
この実施形態の場合、コントローラ21は、緊急ロック機構22がロック作動する車両状態になった後に、ロック継続判定手段41によるロック継続の判定を行い、そのロック継続の判定中の車両状態(車速)に基づいて駆動モータ10の駆動開始の条件を変更し、駆動モータ10の通電開始の時間が車両状態に応じて結果的に調整されるようになっている。
この実施形態による制御は、例えば、車両が連続したカーブを走行する状況を想定している。
この第1の実施形態の制御は、ステップS101の情報の読み込みからステップS104のウェビング引き出し方向の回転判定までは参考例と同様である。
ステップS104において、NO、つまりウェビング引き出し方向の回転無しと判定された場合には、ステップS201に進む。
ステップS201においては、車速や加速度(横加速度及び/又は前後加速度)等の現在の車両の状態信号を読み込む。
つづく、ステップS202においては、ステップS201で検出した加速度の絶対値が解除閾値以下で、その状態が所定時間以上継続しているか否かを判定する。
ここで、加速度についての解除閾値は予め定めた固定値とし、所定時間は現在の車速に対応する値を、例えば、図10に示すような対応マップを参照して決定することができる。これにより、現在の車速が速ければ、解除閾値以下を継続判定する時間(所定時間)は長くなり、逆に、現在の車速が遅ければ、解除閾値以下の継続判定する時間は短くなる。したがって、車速が速いほど、駆動モータ10によるロック解除が実行されるまでの時間が長く(遅く)なる。
また、ステップS202におけるロック解除のための判定は、加速度(前後加速度と横加速度の合成加速度)を微分した値を閾値と比較し、加速の立ち上がり具合を基にして判定するようにしても良い。
したがって、この実施形態においては、緊急ロック機構22が頻繁にロックとロック解除を繰り返して、乗員に不快感や違和感を与えることが無くなる。
この実施形態の場合、コントローラ21は、緊急ロック機構22がロック作動する車両状態になった後に、ロック継続判定手段41によるロック継続の判定を行い、そのロック継続の判定中の路面状況(路面μ)に基づいて駆動モータ10の駆動開始の条件を変更するようになっている。
この実施形態による制御は、VSAコントローラからVSAの作動信号が入力されたときの状況を想定している。
ステップS104において、NO、つまりウェビング引き出し方向の回転無しと判定された場合には、ステップS301に進む。
ステップS301においては、ヨーレートや加速度(横加速度及び/又は前後加速度)等の現在の車両の状態信号と、路面μを読み込む。なお、路面μは、駆動状態と車輪スリップ率等を基にして演算によって求める。
つづく、ステップS302においては、路面μが所定値(車両が大きくスリップする可能性の高い値)以下であるか否かを判定する。ここで、YESの場合には、ステップS303に進み、NOの場合には、ステップS304に進む。
なお、ステップS106,ステップS107へと進んだ場合には、参考例と同様に駆動モータ10によって緊急ロック機構22の強制解除を行う。
10…駆動モータ
11…回転センサ
12…ベルトリール
15…車速センサ(車両状態検出手段)
16…前後加速度センサ(車両状態検出手段)
17…横加速度センサ(車両状態検出手段)
18…ヨーレートセンサ(車両状態検出手段)
19…車輪速センサ(車両状態検出手段)
21…コントローラ(制御手段)
22…緊急ロック機構
41…ロック継続判定手段
Claims (2)
- ウェビングを巻回したベルトリールと、
このベルトリールを巻取り方向に常時付勢する付勢手段と、
車両挙動が不安定になったときに、前記ベルトリールのウェビング引き出し方向の回転を機械的にロックし、前記ベルトリールのウェビング巻取り方向の所定量以上の回転によってロックが自動的に解除される緊急ロック機構と、
前記ベルトリールに回転駆動力を付与する駆動モータと、
前記駆動モータを制御する制御手段と、
を備えた車両のシートベルト装置において、
前記ベルトリールの回転位置を検出する回転位置検出手段と、
車両状態を検出する車両状態検出手段と、
前記駆動モータへの非通電時に、車両状態検出手段によって検出される車両状態と前記回転位置検出手段によって検出されるベルトリールの回転位置の変化に基づいて、前記緊急ロック機構の作動後にロック状態が継続しているか否かを判定するロック継続判定手段と、を設け、
前記制御手段は、前記ロック継続判定手段が所定時間以上ロック状態の継続を判定したときに、前記駆動モータをロック解除方向に回転駆動させるとともに、ロック解除を行うための前記駆動モータの駆動開始時間を、前記ロック継続判定手段による判定中の車速に応じ、車速が速くなるに従って遅くなるように調整することを特徴とする車両のシートベルト装置。 - ウェビングを巻回したベルトリールと、
このベルトリールを巻取り方向に常時付勢する付勢手段と、
車両挙動が不安定になったときに、前記ベルトリールのウェビング引き出し方向の回転を機械的にロックし、前記ベルトリールのウェビング巻取り方向の所定量以上の回転によってロックが自動的に解除される緊急ロック機構と、
前記ベルトリールに回転駆動力を付与する駆動モータと、
前記駆動モータを制御する制御手段と、
を備えた車両のシートベルト装置において、
前記ベルトリールの回転位置を検出する回転位置検出手段と、
車両状態を検出する車両状態検出手段と、
前記駆動モータへの非通電時に、車両状態検出手段によって検出される車両状態と前記回転位置検出手段によって検出されるベルトリールの回転位置の変化に基づいて、前記緊急ロック機構の作動後にロック状態が継続しているか否かを判定するロック継続判定手段と、を設け、
前記制御手段は、前記ロック継続判定手段が所定時間以上ロック状態の継続を判定したときに、前記駆動モータをロック解除方向に回転駆動させるとともに、ロック解除を行うための前記駆動モータの駆動開始時間を、前記ロック継続判定手段による判定中の路面状況に応じて変更することを特徴とする車両のシートベルト装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322381A JP4510913B2 (ja) | 2008-12-18 | 2008-12-18 | 車両のシートベルト装置 |
| DE602009001178T DE602009001178D1 (de) | 2008-12-18 | 2009-10-13 | Sitzgurtvorrichtung für Fahrzeug |
| US12/577,779 US8141806B2 (en) | 2008-12-18 | 2009-10-13 | Seatbelt apparatus for vehicle |
| EP09172879A EP2199160B1 (en) | 2008-12-18 | 2009-10-13 | Seatbelt apparatus for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322381A JP4510913B2 (ja) | 2008-12-18 | 2008-12-18 | 車両のシートベルト装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010143381A JP2010143381A (ja) | 2010-07-01 |
| JP4510913B2 true JP4510913B2 (ja) | 2010-07-28 |
Family
ID=41396238
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008322381A Active JP4510913B2 (ja) | 2008-12-18 | 2008-12-18 | 車両のシートベルト装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8141806B2 (ja) |
| EP (1) | EP2199160B1 (ja) |
| JP (1) | JP4510913B2 (ja) |
| DE (1) | DE602009001178D1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102791540B (zh) * | 2010-03-04 | 2015-12-16 | 本田技研工业株式会社 | 车辆的安全带装置 |
| EP2562056B1 (en) * | 2010-04-23 | 2015-08-05 | Honda Motor Co., Ltd. | Seatbelt device |
| JP5556747B2 (ja) * | 2011-06-20 | 2014-07-23 | 株式会社デンソー | シートベルト制御装置 |
| US9150193B2 (en) * | 2012-06-14 | 2015-10-06 | Autoliv Asp, Inc. | Mode detection switch assembly for self-locking dual-mode seat belt retractor |
| CN111284373B (zh) * | 2018-12-07 | 2021-07-20 | 宝沃汽车(中国)有限公司 | 一种座椅控制方法、装置、车辆和计算机可读存储介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004262258A (ja) * | 2003-01-23 | 2004-09-24 | Autoliv Japan Ltd | 車両用乗員拘束保護装置 |
| JP2005028970A (ja) * | 2003-07-10 | 2005-02-03 | Toyota Motor Corp | 車両用シートベルト装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10061040A1 (de) * | 2000-12-08 | 2002-06-13 | Daimler Chrysler Ag | Verfahren zur Ansteuerung eines reversiblen Gurtstraffers |
| US6685124B2 (en) * | 2001-11-30 | 2004-02-03 | Trw Vehicle Safety Systems Inc. | Seat belt pretensioner with brake |
| DE10332024A1 (de) * | 2003-07-15 | 2005-02-17 | Daimlerchrysler Ag | Verfahren zur Ansteuerung eines reversiblen Gurtstraffers in einem Kraftfahrzeug |
| US9539981B2 (en) * | 2004-10-19 | 2017-01-10 | Autoliv Development Ab | Seat belt retractor, control method thereof, and seat belt device |
| JP4726727B2 (ja) * | 2006-07-18 | 2011-07-20 | 本田技研工業株式会社 | 車両のシートベルト装置 |
| DE102006044456A1 (de) * | 2006-09-21 | 2008-04-17 | Trw Automotive Gmbh | Verfahren zum Ansteuern eines Elektromotors eines Gurtaufrollers und Gurtaufroller |
| JP2008105552A (ja) | 2006-10-25 | 2008-05-08 | Mazda Motor Corp | 車両用シートベルト制御装置 |
-
2008
- 2008-12-18 JP JP2008322381A patent/JP4510913B2/ja active Active
-
2009
- 2009-10-13 US US12/577,779 patent/US8141806B2/en active Active
- 2009-10-13 EP EP09172879A patent/EP2199160B1/en active Active
- 2009-10-13 DE DE602009001178T patent/DE602009001178D1/de active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004262258A (ja) * | 2003-01-23 | 2004-09-24 | Autoliv Japan Ltd | 車両用乗員拘束保護装置 |
| JP2005028970A (ja) * | 2003-07-10 | 2005-02-03 | Toyota Motor Corp | 車両用シートベルト装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2199160A1 (en) | 2010-06-23 |
| US8141806B2 (en) | 2012-03-27 |
| EP2199160B1 (en) | 2011-04-27 |
| US20100156083A1 (en) | 2010-06-24 |
| DE602009001178D1 (de) | 2011-06-09 |
| JP2010143381A (ja) | 2010-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4510913B2 (ja) | 車両のシートベルト装置 | |
| JP2011025764A (ja) | 車両のシートベルト装置 | |
| JP4603066B2 (ja) | 車両のシートベルト装置およびその制御方法 | |
| JP2005028970A (ja) | 車両用シートベルト装置 | |
| US8818643B2 (en) | Seatbelt device | |
| JP7135723B2 (ja) | 車両用シートベルトの制御装置 | |
| JP5244484B2 (ja) | 車両のシートベルト装置およびその制御方法 | |
| JP4758835B2 (ja) | 車両のシートベルト装置 | |
| JP5210745B2 (ja) | 車両のシートベルト装置およびその制御方法 | |
| JP2010089562A (ja) | シートベルト装置 | |
| JP4597755B2 (ja) | シートベルト装置 | |
| JP5438608B2 (ja) | シートベルト装置 | |
| JP4082223B2 (ja) | 車両用シートベルト装置 | |
| JP5210780B2 (ja) | 車両のシートベルト装置 | |
| JP5069761B2 (ja) | シートベルト装置 | |
| JP4597754B2 (ja) | シートベルト装置 | |
| JP5478670B2 (ja) | シートベルト装置 | |
| JP5557697B2 (ja) | シートベルト装置 | |
| JP5538051B2 (ja) | 車両用シートベルト装置 | |
| JP4778036B2 (ja) | 車両のシートベルト装置 | |
| JP4875947B2 (ja) | 車両のシートベルト装置 | |
| JP4658867B2 (ja) | 車両のシートベルト装置 | |
| JP4843434B2 (ja) | 車両のシートベルト装置 | |
| JP2008114771A (ja) | 車両用シートベルト制御装置 | |
| JP2008105552A (ja) | 車両用シートベルト制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100406 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100430 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130514 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4510913 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130514 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140514 Year of fee payment: 4 |