JP4398352B2 - 医療用立体撮像装置 - Google Patents
医療用立体撮像装置 Download PDFInfo
- Publication number
- JP4398352B2 JP4398352B2 JP2004350265A JP2004350265A JP4398352B2 JP 4398352 B2 JP4398352 B2 JP 4398352B2 JP 2004350265 A JP2004350265 A JP 2004350265A JP 2004350265 A JP2004350265 A JP 2004350265A JP 4398352 B2 JP4398352 B2 JP 4398352B2
- Authority
- JP
- Japan
- Prior art keywords
- optical system
- imaging
- eye
- image
- subject
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two 2D image sensors having a relative position equal to or related to the interocular distance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/20—Surgical microscopes characterised by non-optical aspects
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Microscoopes, Condenser (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Lenses (AREA)
Description
また、近年は、接眼光学系の代わりに、左右それぞれの光路の結像面近傍に撮像素子を配置して視差のある画像を撮像する医療用立体撮像装置と、医療用立体撮像装置が撮像した画像を立体表示装置に表示することにより、観察対象物の立体観察が行えるように構成された医療用立体観察装置が使用され始めている。

このような場合、画角が狭いと対物光軸方向に処置具を動かしても観察深度内で観察像の大きさにはほとんど変化がなく観察される。すなわち遠近感がない。通常、人が裸眼視を行う場合、近くのものは大きく、遠くのものは小さく捉え、移動する物体に対しては目で知覚されるその物体の大きさの変化量によって、奥行き感を得ている。
図12(a)から図12(c)は画角が小さい際における観察者の視線方向に移動する物体を観察した場合の奥行き感を表した図である。図13(a)から図13(c)は画角が大きい際における観察者の視線方向に移動する物体を観察した場合の奥行き感を表した図である。また、図12(a),図13(a)は物体が観察者に近づく様子を示した図であり、図12(b),(c),図13(b),(c)は物体が観察者に近づく際の観察視野を示すものである。
すなわち、図12(a)から図12(c)に示すように、観察視野角が狭いと遠近感が得られ難く、このため、球体が観察者に近づいたことがわかり難い。これは、観察者と球体の距離が変わっても、観察者が捉える球体の大きさがあまり変化しないことに起因している。
一方、図13(a)から図13(c)の示すように観察視野角が広い場合には、観察者と球体の距離が変わることによって、観察者が捉える球体の大きさの変化量が大きく、遠近感が得られやすい。このため、観察者は観察視野内で奥行きを感じることができる。このように、立体視のできない2次元のモニターなどに映し出される映像において奥行きを感じることができるのは、この遠近感が寄与するところが大きい。
手術用顕微鏡の接眼光学系を撮像素子に置き換えた医療用立体撮像装置と、医療用立体撮像装置が撮像した画像を立体表示装置に表示して観察する医療用立体観察装置においても同様の問題があることは言うまでもない。
本発明の医療用立体撮像装置は、被写体を立体撮影するための撮像光学系と撮像素子を備えた医療用立体撮像装置において、前記撮像光学系は、被写体の像を結像面に結像する対物光学系と、該対物光学系側から入射する光束をアフォーカルな光束として前記撮像素子側に射出し、前記対物光学系が結像した像を前記撮像素子の撮像面近傍に伝送するコリメータ光学系とを含み、該コリメータ光学系と前記撮像素子の間に設定される瞳位置とその共役位置との間に前記対物光学系が配置されることを特徴とする。
上記発明においては、前記コリメータ光学系と前記撮像素子の間に、該撮像素子が撮像する被写体の像の大きさを調整する変倍光学系が配置されていることが望ましい。
また、上記参考例においては、前記撮像光学系は、さらに1対の変倍光学系を含み、前記変倍光学系により変えることができる倍率の範囲のうち、少なくとも1つの倍率に設定したときに、前記撮像光学系の入射瞳位置が前記対物光学系と被写体の間に配置されることが望ましい。
本発明の参考例としての医療用立体撮像装置は、医療用立体撮像装置を構成する撮像光学系の入射瞳位置を撮像光学系の最も被写体側の面から被写体までの間に配置することによって、適当な広さの観察視野を確保し、撮像した画像に遠近感の情報を付加するように構成した。また、医療用立体撮像装置により撮像し、医療用立体観察装置により提供される画像に遠近感の情報を付加するために必要な観察視野角の条件は、以下のようなものである。
さr´は(4)式で表される。
(6)式の上限値を越えた場合、観察視野内で被写体を移動させたときに被写体の大きさの変化率が大きくなりすぎてしまい、観察者が立体画像を観察する際に逆に違和感を覚えるようになる。このため、観察者の疲労の原因となり好ましくない。(6)式よりθを求めると、8.8°<2θ<46°であり、それ故、医療用立体撮像装置により撮像し、医療用立体撮像装置により提供される画像に遠近感の情報を付加するために必要な観察視野角の条件は、(7)式のようになる。
以下、図1から図4を参照して本発明の参考例としての医療用立体撮像装置における第1参考実施例を説明する。
図1は本実施例における医療用立体撮像装置を含むシステムの全体図であり、図2は本実施例における医療用立体撮像装置内部の撮像光学系の構成図であり、図3は医療用立体撮像装置を用いた外科手術において、術部に対する処置具の動きを模式的に表した模式図であり、図4は表示装置に表示される処置具を移動させた際の術野の様子を模式的に表した模式図である。
図中の符号1は患者Aに対する外科手術を行うために、被写体αである術部aを観察するための医療用立体撮像装置であり、符号2は医療用立体撮像装置1に接続され、医療用立体撮像装置1で撮像した観察像を立体表示可能な3Dモニターである。3Dモニターにはグリップ7が設けられている。医療用立体撮像装置1と、3Dモニター2はアーム3に接続され、術部aを観察しやすい位置へ自由に移動し、固定することが可能になっている。符号4は光源であり、光源4を発した光はアーム3を経由して医療用立体撮像装置1に接続されたライトガイド4aによって、術部aまで伝送される。符号5はカメラコントロールユニット(以降CCUと呼ぶ)であり、アーム3を経由して医療用立体撮像装置1および、3Dモニター2に接続され、医療用立体撮像装置1からの撮像信号を画像信号に変換して3Dモニターに送信する。光源4および、CCU5はトロリー6に収納されている。
3つのレンズL1a,L2a,L3aにより右目用対物光学系(対物光学系)Laが構成され、3つのレンズL1b,L2b,L3bにより左眼用対物光学系(対物光学系)Lbが構成されている。F1a,F2a,F3a,F1b,F2b,F3bは赤外光カットや、モアレ除去等を目的とした光学フィルターである。右目用CCD(撮像素子)8aは右目用対物光学系Laからの観察像を撮像し、左目用CCD(撮像素子)8bは左目用対物光学系Lbからの観察像を撮像し、CCU5に出力する。9aは右目用明るさ絞り(絞り)、9bは左眼用明るさ絞り(絞り)であり、左右それぞれの対物光学系の術部側に配置されており、入射瞳位置を規定している。
この時、医療用立体撮像装置1の画角2θは瞳位置を起点として図に示すように定義される。また、術者の作業空間にあたるWDは医療用立体撮像装置1の下面から、被写体αまでの距離で定義される。
図1に示すように、術者はまずグリップ7を保持してアーム3を移動させながら、医療用立体撮像装置1および、3Dパネル2を術部aが観察できる位置に配置する。
次に術者は術部aの観察を行う。光源4から照射された照明光はライトガイド4aを通して、術部aを照明する。術部aへの照明光の反射光は右目用明るさ絞り9a、左眼用明るさ絞り9bを通り、フィルターF1a,F2a,F1b,F2b、右目用対物光学系La、左眼用対物光学系Lb、フィルターF3a,F3bを通って、右目用の光束は右目用CCD8aに、左眼用の光束は左目用CCD8bに結像する。右目用CCD8a、左目用CCD8bは右目用、左目用の画像情報をCCU5に出力する。CCU5は受け取った画像情報を3Dモニター2に出力し、3Dモニター2は術部aを立体表示する。術者は3Dモニター2により術部aの3次元観察を行う。この時、術部aへのピントの調整は、グリップ7を保持し、医療用立体撮像装置1をアーム3によって術部aへの距離を変更することによって行う。
次に術者は処置具10を病変部bに向かって、図3中Cの位置に移動する。この時3Dモニターには図4(b)のように処置具10は表示される。本実施例においては医療用立体撮像装置1が備える光学系の入射瞳位置を右目用、左目用対物光学系La,Lbの物体側の面よりも前方(物体側)に配置した。これにより、入射瞳を対物光学系の内部に配置する場合に比べて画角を広く設定することができる。図3の矢印E方向への物体の動きに対して、対物光学系のピントの合う範囲では、図4のように医療用立体撮像装置1に近いものは大きく、遠いものは小さく見えるようになる。
なお、本実施例においては医療用立体撮像装置1と3Dモニター2一体としたが、それぞれを別々のアームに支持しても良い。
図5に従って本発明における一実施例を説明する。ただし、第1参考実施例と同名称、同番号のものは、第1参考実施例と同様であるので、ここでの説明は省略する。
図5は本実施例における医療用立体撮像装置内部の撮像光学系の構成図である。
3つのレンズL4a,L5a,L6aにより右目用対物光学系(対物光学系)La1が構成され、2つのレンズL7a,L8aによって右目用コリメーターレンズ(コリメータ光学系)La2が構成され、7つのレンズL9a〜L15aにより右目用変倍光学系(変倍光学系)La3が構成されている。同様に3つのレンズL4b,L5b,L6bにより左目用対物光学系(対物光学系)Lb1が構成され、2つのレンズL7b,L8bによって左目用コリメーターレンズ(コリメータ光学系)Lb2が構成され、7つのレンズL9b〜L15bにより左目用変倍光学系(変倍光学系)Lb3が構成されている。F4a〜F7a、F4b〜F7bは赤外光カットや、モアレ除去等を目的とした光学フィルターである。右目用CCD10aは右目用変倍光学系La3からの観察像を撮像し、左目用CCD10bは左目用変倍光学系Lb3からの観察像を撮像し、CCU5に出力する。
この時右目用CCD(撮像素子)10a、左目用CCD(撮像素子)10bは平行に並んだ光学系La1〜La3、Lb1〜Lb3の光軸に対してそれぞれのCCDの有効画素エリアの中心を外側(図ではそれぞれのCCDが互いに離れる方向)に偏心させて配置している。これにより、被写体αにおいて、左右の観察中心が一致するようにしている。
このような構成とすることにより、左右の光学系の入射瞳を、光学系の最も物体側の面から被写体までの間に配置するのと等価の作用を得ることができる。本実施例における詳細なレンズデータは以下の表4から表6に示す。
第1参考実施例と同様に、術者は医療用立体撮像装置1および、3Dパネル2を術部aが観察できる位置に配置し、術部aの観察を行う。光源4から照射された照明光はライトガイド4aを通して、術部aを照明する。術部aからの反射光は、右目用対物光学系La1(左目用対物光学系Lb1)、右目用コリメーターレンズLa2(左目用コリメーターレンズLb2)、右目用変倍光学系La3(左目用変倍光学系Lb3)、フィルターF4a〜F7a(F4b〜F7b)を通って、右目用の光束は右目用CCD10a(左眼用の光束は左目用CCD10b)によって撮像される。右目用CCD10a、左目用CCD10bはそれぞれ左目用、右目用の画像情報をCCU5に出力する。これらの画像情報により術者は3Dモニター2により立体観察を行う。
次に術者は処置にうつる。ここでの作用は第1参考実施例と同様であるので、説明を省略する。術者が処置を行う過程では、術者は図示しない変倍スイッチを押すことにより、変倍光学系La3(Lb3)の、L11a,L12a(L11b,L12b)の位置を図示しないレンズ位置移動枠をモータ等により移動させ、モニター上に映し出された術部の画像の拡大・縮小を行う。
図6に従って本発明の参考例としての医療用立体撮像装置における第2参考実施例を説明する。ただし、第1参考実施例と同名称、同番号のものは、第1参考実施例と同様であるので、ここでの説明は省略する。
図6は本実施例における医療用立体撮像装置内部の撮像光学系の構成図である。
2つのレンズL16,L17により対物光学系Lc1が構成され、7つのレンズL18〜L24により変倍光学系Lc2が構成され、2つのレンズL25,L26により結像光学系Lc3が構成されている。L27は瞳分割プリズムであり、L28,L29は反射プリズムである。右目用CCD(撮像素子)13aは反射プリズムL28からの観察像を撮像し、左目用CCD(撮像素子)13bは反射プリズムL29からの観察像を撮像する。F8は赤外光カットや、モアレ除去等を目的とした光学フィルターである。14は低倍時の瞳位置、15は中倍時の瞳位置、16は高倍時の瞳位置を示している。本実施例における詳細なレンズデータは以下の表7から表9に示す。
第1参考実施例と同様に、術者は医療用立体撮像装置1および、3Dパネル2を術部aが観察できる位置に配置し、術部aの観察を術部全体の把握ができる低倍の状態で行う。本発明においては実視野Φ50mm以上の状態で術部全体を観察するために、倍率を低倍とする。
光源4から照射された照明光はライトガイド4a通して、術部aを照明する。術部aへの照明光の反射光は、対物光学系Lc1、フィルターF8、変倍光学系Lc2、結像光学系Lc3を通り、瞳位置に配置された瞳分割プリズムL27が、瞳を右目用光束、左目用光束に分割する。右目用光束は反射プリズムL28により向きを変え右目用CCD13aに、左目用光束は反射プリズムL29により向きを変え左目用CCD13bによって撮像される。右目用CCD13a、左目用CCD13bはそれぞれ右目用、左目用の画像情報をCCU5に出力する。これらの画像情報により術者は3Dモニター2により3次元観察を行う。
一般に、穴の奥などを高倍で観察しながら処置を行う場合は、遠近感が強いと観察したい部分が高倍であっても小さく観察されてしまうことから、非常に細かい作業を行う場合にはかえってやりにくくなってしまうことがある。逆に、低倍側では遠近の効果が強いほうがより肉眼視に近く、自然な感覚で手術を行うことができる。そのため、本実施例においては低倍側では瞳が物体側に近づくことにより遠近感の効果が強く、高倍側では瞳が物体から離れることにより遠近の効果が弱くなり、手術の実用性に即して遠近感の効果が変化するようになっている。
図7に従って本発明の参考例としての医療用立体撮像装置における第3参考実施例を説明する。ただし、第1参考実施例と同名称、同番号のものは、第1参考実施例と同様であるので、ここでの説明は省略する。
図7は本実施例における医療用立体撮像装置内部の撮像光学系の構成図である。
11個のレンズL30〜L41により焦点距離可変の対物光学系Lc4が構成され、6個のレンズL42〜L47によりコリメーターレンズ(コリメータ光学系)Lc5が構成され、13個のレンズL48a〜L60aにより、右目用変倍光学系(変倍光学系)La4が構成され、13個のレンズL48b〜L60bにより左目用変倍光学系(変倍光学系)Lb4が構成されている。また2つのレンズL61a,L62aにより右目用結像光学系(結像光学系)La5が、2つのレンズL61b,L62bにより左目用結像光学系(結像光学系)Lb5が構成されている。F9a,F10a,F9b,F10b,F11は赤外光カットや、モアレ除去等を目的とした光学フィルターである。18は低倍時の瞳位置、19は高倍時の瞳位置を示している。本実施例における詳細なレンズデータは以下の表10から表14に示す。
なお、表10および表11は一連のレンズデータを示す表であり、表12および表13も一連のレンズデータを示す表である。
第1参考実施例と同様に、術者は医療用立体撮像装置1および、3Dパネル2を術部aが観察できる位置に配置し、術部aの観察を術部全体の把握ができる低倍の状態で行う。光源4から照射された照明光はライトガイド4aを通して、術部aを照明する。術部aへの照明光の反射光は、フィルターF11、対物光学系Lc4、コリメーターレンズLc5、右目用変倍光学系La4、左目用変倍光学系Lb4、右目用結像光学系La5、左目用結像光学系Lb5、フィルターF9a,F10a,F9b,F10bを通り、右目用光束は右目用CCD17aに、左目用光束は左目用CCD17bによって撮像される。右目用CCD17a、左目用CCD17bはそれぞれ右目用、左目用の画像情報をCCU5に出力する。
図8から図10に従って本発明の参考例としての医療用立体撮像装置における第4参考実施例を説明する。
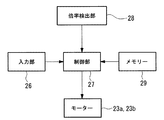
図8は本実施例における医療用立体撮像装置内部の撮像光学系の構成図であり、図9は医療用立体撮像装置内部に設けられた絞り可動部の構成図であり、図10は本実施例における絞り位置制御部のブロック図である。
術者が観察をしてから、倍率変更、処置を行うまでの作用は上述した本発明に係る一実施例と同様であるので、説明を省略する。
術者は、術部の見え方の不自然さを解消するため、図示しないスイッチを押す。スイッチからの入力信号は入力部26で受信され、その信号を制御部27に送る。制御部27はモータ駆動信号をモータ23a,23bに出力しモータ23a,23bを同時に回転させる。モータ23a,23bが回転すると、送りネジ22a,22bも同時に回転する。
これにより、絞り20a,20bはそれぞれ送りネジ22a,22bに対してガイド用メネジ20a´,20b´でかみ合っているため、送りネジ22a,22bの回転に連動して送りネジ22a,22bの軸方向にそれぞれ移動する。絞りの動きに連動し左右それぞれの瞳位置は矢印25a,25b方向に移動する。
一方、医療用立体撮像装置1の倍率に応じてあらかじめメモリー29に好みの位置を登録しておくこともできる。倍率の変更作業に応じて倍率検出部28は倍率検出を行い、検出結果を制御部27に出力する。制御部27は倍率検出部28から入力された信号と、メモリー29からの信号とを比較し、変更された倍率での絞り位置を算出し、その位置へ絞りを移動させるための駆動信号をモータ23a,23bに入力する。これにより、先に説明したものと同一の作用により絞り位置は変更される。
また、本実施例においては上述した本発明に係る一実施例と同一の光学系を用いたが、対物光学系が焦点距離可変であっても良い。その場合、WDが長い時には絞りを前に出して瞳を被写体側へ移動させ、WDが短い時には絞りを手前に動かして、瞳をCCD側へ移動させることにより、WDによらず遠近の感覚を同じにできる効果がある。
8a,10a,13a,17a 右目用CCD(撮像素子)
8b,10b,13b,17b 左目用CCD(撮像素子)
9a 右目用明るさ絞り(絞り)
9b 左眼用明るさ絞り(絞り)
20a 右目用絞り(絞り)
20b 左目用絞り(絞り)
α 被写体
La,La1 右目用対物光学系(対物光学系)
Lb,Lb1 左眼用対物光学系(対物光学系)
La2 右目用コリメーターレンズ(コリメータ光学系)
Lb2 左目用コリメーターレンズ(コリメータ光学系)
La3,La4 右目用変倍光学系(変倍光学系)
Lb3,Lb4 左目用変倍光学系(変倍光学系)
Lc1,Lc4 対物光学系
Lc2 変倍光学系
Lc3 結像光学系
Lc5 コリメーターレンズ(コリメータ光学系)
La5 右目用結像光学系(結像光学系)
Lb5 左目用結像光学系(結像光学系)
Claims (2)
- 被写体を立体撮影するための撮像光学系と撮像素子を備えた医療用立体撮像装置において、
前記撮像光学系は、被写体の像を結像面に結像する対物光学系と、該対物光学系側から入射する光束をアフォーカルな光束として前記撮像素子側に射出し、前記対物光学系が結像した像を前記撮像素子の撮像面近傍に伝送するコリメータ光学系とを含み、
該コリメータ光学系と前記撮像素子の間に設定される瞳位置とその共役位置との間に前記対物光学系が配置されることを特徴とする医療用立体撮像装置。 - 前記コリメータ光学系と前記撮像素子の間に、該撮像素子が撮像する被写体の像の大きさを調整する変倍光学系が配置されていることを特徴とする請求項1に記載の医療用立体撮像装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004350265A JP4398352B2 (ja) | 2004-12-02 | 2004-12-02 | 医療用立体撮像装置 |
| US11/288,339 US7453631B2 (en) | 2004-12-02 | 2005-11-29 | Three-dimensional medical imaging apparatus |
| US12/287,616 US7768701B2 (en) | 2004-12-02 | 2008-10-09 | Three-dimensional medical imaging apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004350265A JP4398352B2 (ja) | 2004-12-02 | 2004-12-02 | 医療用立体撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006158452A JP2006158452A (ja) | 2006-06-22 |
| JP2006158452A5 JP2006158452A5 (ja) | 2006-10-05 |
| JP4398352B2 true JP4398352B2 (ja) | 2010-01-13 |
Family
ID=36597035
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004350265A Expired - Fee Related JP4398352B2 (ja) | 2004-12-02 | 2004-12-02 | 医療用立体撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7453631B2 (ja) |
| JP (1) | JP4398352B2 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005292320A (ja) * | 2004-03-31 | 2005-10-20 | Olympus Corp | 画像顕微鏡装置 |
| DE102005040830A1 (de) * | 2005-08-25 | 2007-03-15 | Carl Zeiss Jena Gmbh | Optische Anordnung und Verfahren zur Abbildung tiefenstrukturierter Objekte |
| AU2007309057B2 (en) * | 2006-10-20 | 2013-06-27 | Carnegie Mellon University | Apparatus for positioning a device |
| JP5105882B2 (ja) | 2007-01-12 | 2012-12-26 | オリンパスメディカルシステムズ株式会社 | 実体顕微鏡 |
| WO2008100229A1 (en) * | 2007-02-13 | 2008-08-21 | National University Of Singapore | An imaging device and method |
| US8982203B2 (en) * | 2007-06-06 | 2015-03-17 | Karl Storz Gmbh & Co. Kg | Video system for viewing an object on a body |
| JP5192892B2 (ja) * | 2008-04-23 | 2013-05-08 | オリンパスメディカルシステムズ株式会社 | 立体撮影光学系 |
| US20140066704A1 (en) * | 2010-06-18 | 2014-03-06 | Vantage Surgical Systems Inc. | Stereoscopic method for minimally invasive surgery visualization |
| US20140066703A1 (en) * | 2010-06-18 | 2014-03-06 | Vantage Surgical Systems Inc. | Stereoscopic system for minimally invasive surgery visualization |
| CN102959467B (zh) * | 2010-06-29 | 2016-08-31 | 富士胶片株式会社 | 单眼立体成像装置 |
| DE102010026171A1 (de) * | 2010-07-06 | 2012-01-12 | Carl Zeiss Surgical Gmbh | Digitales Mikroskopiesystem |
| US20120019511A1 (en) * | 2010-07-21 | 2012-01-26 | Chandrasekhar Bala S | System and method for real-time surgery visualization |
| DE102010041382A1 (de) | 2010-09-24 | 2012-03-29 | Carl Zeiss Microimaging Gmbh | Vorrichtung und Verfahren zur dreidimensionalen Vermessung eines Objektes |
| JP5640143B2 (ja) * | 2011-03-31 | 2014-12-10 | 富士フイルム株式会社 | 撮像装置及び撮像方法 |
| US20140187857A1 (en) * | 2012-02-06 | 2014-07-03 | Vantage Surgical Systems Inc. | Apparatus and Methods for Enhanced Visualization and Control in Minimally Invasive Surgery |
| JP2013047837A (ja) * | 2012-10-25 | 2013-03-07 | Olympus Medical Systems Corp | 立体撮影光学系 |
| JP6305187B2 (ja) * | 2014-04-21 | 2018-04-04 | 三鷹光器株式会社 | 手術顕微鏡システム |
| US9901406B2 (en) | 2014-10-02 | 2018-02-27 | Inneroptic Technology, Inc. | Affected region display associated with a medical device |
| US10188467B2 (en) | 2014-12-12 | 2019-01-29 | Inneroptic Technology, Inc. | Surgical guidance intersection display |
| WO2016132923A1 (ja) * | 2015-02-17 | 2016-08-25 | 日本板硝子株式会社 | 車両用の窓ガラス及び車載システム |
| JP2017045124A (ja) * | 2015-08-24 | 2017-03-02 | 株式会社日本自動車部品総合研究所 | 視差検出装置 |
| US10823950B2 (en) * | 2016-01-07 | 2020-11-03 | Digital Surigcals PTE. LTD. | Camera system with balanced monocular cues for use in digital stereo microscopes |
| EP3285107B2 (en) | 2016-08-16 | 2024-02-28 | Leica Instruments (Singapore) Pte. Ltd. | Surgical microscope with gesture control and method for a gesture control of a surgical microscope |
| JP6880606B2 (ja) * | 2016-08-30 | 2021-06-02 | 株式会社ニデック | 眼科用手術顕微鏡 |
| US11484365B2 (en) * | 2018-01-23 | 2022-11-01 | Inneroptic Technology, Inc. | Medical image guidance |
| WO2020095443A1 (ja) * | 2018-11-09 | 2020-05-14 | 株式会社ニコン | 顕微鏡 |
| US11782254B2 (en) * | 2020-07-24 | 2023-10-10 | United Scope LLC | Digital microscopy system and graphical user interface |
| US12207977B2 (en) | 2022-08-08 | 2025-01-28 | Alcon Inc. | Support assembly for ophthalmic visualization system |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1A (en) * | 1836-07-13 | John Ruggles | Locomotive steam-engine for rail and other roads | |
| US5557454A (en) * | 1992-12-25 | 1996-09-17 | Olympus Optical Co., Ltd. | Stereoscopic endoscope |
| JP3283084B2 (ja) * | 1992-12-28 | 2002-05-20 | オリンパス光学工業株式会社 | 立体視硬性内視鏡 |
| US5743846A (en) * | 1994-03-17 | 1998-04-28 | Olympus Optical Co., Ltd. | Stereoscopic endoscope objective lens system having a plurality of front lens groups and one common rear lens group |
| JP3628717B2 (ja) * | 1994-03-17 | 2005-03-16 | オリンパス株式会社 | 立体視内視鏡 |
| DE19722726C2 (de) * | 1996-06-24 | 2003-08-28 | Zeiss Carl Jena Gmbh | Anordnung zur Erzeugung eines stereoskopischen Bildes |
| IT1279699B1 (it) * | 1995-12-12 | 1997-12-16 | C S O Costruzione Strumenti Of | Microscopio stereoscopico ad ottica convergente con lampada a fessura per la ripresa video |
| JP3645655B2 (ja) * | 1996-05-29 | 2005-05-11 | オリンパス株式会社 | 実体顕微鏡 |
| JP3478686B2 (ja) * | 1996-11-15 | 2003-12-15 | キヤノン株式会社 | 複眼撮像装置 |
| JP3752356B2 (ja) | 1997-04-09 | 2006-03-08 | オリンパス株式会社 | 実体顕微鏡 |
| JP4255549B2 (ja) * | 1999-01-07 | 2009-04-15 | 株式会社トプコン | 作業用顕微鏡 |
| JP3527659B2 (ja) * | 1999-05-31 | 2004-05-17 | ペンタックス株式会社 | 立体顕微鏡 |
| JP4245750B2 (ja) * | 1999-10-15 | 2009-04-02 | オリンパス株式会社 | 立体観察装置 |
| JP4804649B2 (ja) * | 2001-05-29 | 2011-11-02 | 株式会社トプコン | 立体顕微鏡 |
| JP4068371B2 (ja) * | 2001-06-13 | 2008-03-26 | 株式会社トプコン | 手術用顕微鏡 |
| JP2004309930A (ja) * | 2003-04-09 | 2004-11-04 | Olympus Corp | 立体観察システム |
| WO2005040866A2 (de) * | 2003-10-23 | 2005-05-06 | Zeiss Carl Ag | Abbildungsoptiken mit einstellbarer brechkraft und verfahren zum einstellen einer brechkraft einer optik |
-
2004
- 2004-12-02 JP JP2004350265A patent/JP4398352B2/ja not_active Expired - Fee Related
-
2005
- 2005-11-29 US US11/288,339 patent/US7453631B2/en active Active
-
2008
- 2008-10-09 US US12/287,616 patent/US7768701B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7453631B2 (en) | 2008-11-18 |
| US7768701B2 (en) | 2010-08-03 |
| US20060135866A1 (en) | 2006-06-22 |
| US20090054765A1 (en) | 2009-02-26 |
| JP2006158452A (ja) | 2006-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4398352B2 (ja) | 医療用立体撮像装置 | |
| JP2006158452A5 (ja) | ||
| US10895742B2 (en) | Microsurgery system for displaying in real time magnified digital image sequences of an operated area | |
| JP6930915B2 (ja) | 眼科処置における拡大とそれに関わる装置、システム、および方法 | |
| US11154378B2 (en) | Surgical visualization systems and displays | |
| US7768702B2 (en) | Medical stereo observation system | |
| JP2016536093A (ja) | 手術可視化システム及びディスプレイ | |
| WO2020170866A1 (ja) | 制御装置、眼科用顕微鏡システム、眼科用顕微鏡及び画像処理装置 | |
| JP4383188B2 (ja) | 立体観察システム | |
| US20250017464A1 (en) | Surgery 3d visualization apparatus | |
| JP2004337247A (ja) | 立体観察システム | |
| US12023106B2 (en) | Virtual reality 3D eye-inspection by combining images from position-tracked optical visualization modalities | |
| JP2002085330A (ja) | 立体視内視鏡装置 | |
| JP7092111B2 (ja) | 撮像装置、映像信号処理装置および映像信号処理方法 | |
| US11504001B2 (en) | Surgery 3D visualization apparatus | |
| JP4674094B2 (ja) | 立体観察装置 | |
| JP6830334B2 (ja) | 眼科装置 | |
| JP4246510B2 (ja) | 立体内視鏡システム | |
| WO2018043205A1 (ja) | 医療用画像処理装置、医療用画像処理方法、プログラム | |
| WO2020161905A1 (ja) | 顕微鏡、顕微鏡用制御装置及びプログラム | |
| JP2017012536A (ja) | 眼科用顕微鏡 | |
| JP2024092349A (ja) | 手術用観察システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060817 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090929 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091022 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121030 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131030 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |