JP4109003B2 - 情報記録再生装置、信号復号回路及び方法 - Google Patents
情報記録再生装置、信号復号回路及び方法 Download PDFInfo
- Publication number
- JP4109003B2 JP4109003B2 JP2002095505A JP2002095505A JP4109003B2 JP 4109003 B2 JP4109003 B2 JP 4109003B2 JP 2002095505 A JP2002095505 A JP 2002095505A JP 2002095505 A JP2002095505 A JP 2002095505A JP 4109003 B2 JP4109003 B2 JP 4109003B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- error
- phase
- preamble
- waveform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











































Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/18—Error detection or correction; Testing, e.g. of drop-outs
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/02—Recording, reproducing, or erasing methods; Read, write or erase circuits therefor
- G11B5/09—Digital recording
Description
【発明の属する技術分野】
本発明は、磁気ディスク、MO、光ディスク、磁気テープ等の情報記録再生装置、信号復号回路及び方法に関し、特に、ヘッド再生信号を非同期クロックにより離散化した後にタイミングリカバリを行うための情報記録再生装置、信号復号回路及び方法に関する。
【0002】
【0003】
【従来の技術】
従来のリードチャネルLSIのタイミングリカバリのためのタイミング再生ループでは、ADコンバータでのサンプリングクロックと判定を行なうシンボルレートクロックは同じである。このため、最適な判定タイミングを得るためには、ADコンバータのサンプリングクロックの位相を直接制御する必要がある。
【0004】
これに対し、ADコンバータのサンプリングクロックを固定し、ディジタルPLLを実現する信号補間により最適な判定タイミングを得る方法がある。信号補間法では、周波数オフセットによるシンボルレートの変化に対応するために、シンボルレートより高い周波数でサンプリングを行なう必要がある。
【0005】
シンボル判定は、サンプリング信号を等化した後に信号補間によりシンボルレートのサンプリング信号に変換した後に行なう。判定方法は、いずれの場合もビタビによる軟判定、またはリファレンスとの比較による硬判定によって、PR(パーシャルレスポンス)のターゲットに等化されたリード波形のレベルを判定する。
【0006】
図42は、従来の磁気記録再生装置に使用されるタイミングリカバリ部を備えたデータ再生部のブロック図である。
【0007】
図42において、再生ヘッドからのアナログ電圧はヘッドICのプリアンプによって増幅した後、可変利得アンプ(VGA)1200、ローパスフィルタとして機能するCTフィルタ1202、ADコンバータ(ADC)1204を経由してディジタル信号に変換される。
【0008】
続いてFIRフィルタ1206によって波形等化を行った後、ビタビ判定器1208で復号を行う。更に復号されたデータはRLL復号器1210で復号される。
【0009】
タイミングリカバリ部1211は、誤差検出器1216、ループフィルタ1218及び電圧制御発振器(VCO)1220によりADコンバータ1204でヘッド再生信号をサンプリングするクロックのタイミングを制御するPLLを構成している。また可変利得アンプ(VGA)1200には利得制御器1212が設けられ、利得を制御して振幅を補正する。
【0010】
即ち、タイミングリカバリ部1211は、FIRフィルタ1206の出力信号yとビタビ判定器1208からの判定値y∧を用いて位相オフセットΔτを求め、この位相誤差Δτをなくすように電圧制御発振器(VCO)1220の発振周波数を制御する。これによりADコンバータ1204のサンプリング位置が制御されるフィードバックループが形成される。
【0011】
またゲインエラーΔGをFIRフィルタ1206の出力信号yとその判定値y∧を用いて求め、ゲインエラーΔGをなくすように利得制御器1212の制御電圧Vgを調整して可変利得アンプ(VGA)1200により振幅補正を行う。
【0012】
更に、タイミングリカバリ部1211には位相オフセット検出器1214が設けられる。位相オフセット検出器1214は、図43(A)のADC出力となる再生データの位相引込み用のプリアンブル領域1223の先頭部分において、図43(B)の初期位相誤差算出1226により初期位相誤差(位相オフセット)Δτ0を検出し、ループフィルタ1218に初期位相誤差Δτ0をプリセットして図43(C)の位相引き込み1228を行う。
【0013】
この初期位相誤差の検出による位相引き込みは所謂ゼロフェーズスタートを行うこととなり、その後のプリアンブル1223を使用した周波数・位相引き込み1230における引き込み時間の短縮を図っている。
【0014】
図44は従来のデータ再生部の他の例であり、ディジタルPLLの位相ループによりタイミングリカバリを行う。この場合、ADコンバータ1204に対してはクロック発振器1221から固定クロックを使用してサンプリングを再生信号とは非同期に行う。
【0015】
FIRフィルタ1206に続いてはFIR補間フィルタ1240が設けられ、FIR補間フィルタ1240はディジタルアキュームレータ1222との組み合わせによりディジタルVCOとして動作する。タイミングリカバリ部1211の誤差検出器1216で求めた位相誤差Δτをループフィルタ1218で積分し、更にディジタルアキュームレータ1222で積分してFIR補間フィルタ1240のタップ係数を位相誤差Δτに応じて調整することで、固定クロックによるサンプルレートを本来のシンボルレートのタイミングに合わせる。
【0016】
またタイミングリカバリ部1211には位相オフセット検出器1214が設けられ、プリアンブル領域の先頭部分において位相の初期位相誤差(位相オフセット)Δτ0を検出してディジタルアキュームレータ1222にプリセットすることにより、ゼロフェーズスタートの位相引き込みを行う。
【0017】
【発明が解決しようとする課題】
このように従来のタイミングリカバリ部にあっては、プリアンブル領域の先頭部分で初期位相誤差を検出して補償し、残りのプリアンブル領域で周波数引き込みを行っており、読出しデータの初期位相誤差に対する補償は可能であるが、周波数オフセットに対しては考慮されておらず、周波数引き込み範囲を広く取ることが困難であった。
【0018】
また、従来のタイミングリカバリ部は周波数オフセット(初期周波数誤差)を持った状態からループのフィードバック制御により引き込みを行うため、更に周波数引き込み範囲を広げるには、ある程度長いプリアンブル領域が必要となり、磁気記録再生装置のフォーマット効率を悪化させる問題があった。
【0019】
本発明は、プリアンブル長を短くすると共に周波数引き込み範囲を広くして高密度記録と信頼性を高める情報記録再生装置、信号復号回路及び方法を提供することを目的とする。
【0020】
【課題を解決するための手段】
(情報記録再生装置その1)
図1は本発明の原理説明図である。本発明は、情報を磁気記録媒体上に記録して再生する情報記録再生装置であり、図1(A)のように、再生データの先頭領域から位相オフセット及び周波数オフセットを検出して初期補正するタイミングリカバリ部100を設けた特徴とする。
【0021】
ここで、以下の説明における位相オフセットとは、タイミングリカバリ部(タイミング再生ループ)の動作を開始するときの初期位相誤差のことである。また周波数オフセットとは、同じくタイミングリカバリ部(タイミング再生ループ)の動作を開始するときの初期周波数誤差のことである。
【0022】
またタイミングリカバリ部100は、固定クロックによりヘッド再生信号をサンプリングしたデータを記憶するバッファ62と、バッファ62へのデータ書込みと並行してデータ先頭領域から位相オフセットを検出する位相オフセット検出器70と、バッファ62へのデータ書込みと並行してデータ先頭領域から周波数オフセットを検出する周波数オフセット検出器72と、検出された位相オフセット及び周波数オフセットの補正状態を初期設定した後に、バッファ62からデータを読出しながら先頭領域で周波数引き込み及び位相引き込みを行うPLLとを備える。
【0023】
このため本発明によれば、プリアンブル領域の先頭部分における誤差検出による補償を位相に対してのみではなく、周波数についても誤差を検出して補償することで、位相引き込み及び周波数引き込みを短時間で行ってプリアンブル領域を短くできると共に、周波数の引き込み範囲を広くすることができる。
【0024】
また再生データは、図1(B)のように、プリアンブル、シンクマーク及びユーザデータで構成されたセクタデータであり、タイミングリカバリ部100は、プリアンブルから位相誤差及び周波数誤差を検出して初期補正する。
【0025】
バッファ62は、再生データの先頭領域の書込み終了した時点で書込データの先頭からの読出しを開始する。本発明では、バッファに一時記憶する分だけ遅延が起きるが、プリアンブル領域が短くできることを考慮すると、バッファ遅延は実質的に無視できる。
【0026】
本発明の別の形態にあっては、周波数オフセットのみを検出して補償してもよい。即ち、情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、再生データの先頭領域から周波数誤差を検出して初期補正するタイミングリカバリ部を設けた特徴とする。
【0027】
(信号復号回路その1)
本発明は、情報を磁気記録媒体上に記録して再生する信号復号回路を提供する。この信号復号回路は、再生データの先頭領域から位相誤差及び周波数誤差を検出して初期補正するタイミングリカバリ部を備えたことを特徴とする。尚、信号復号回路の詳細は、情報記録再生装置と基本的に同じになる。
【0028】
(情報記録再生方法その1)
本発明は、情報を磁気記録媒体上に記録して再生する情報記録再生方法を提供する。この情報記録再生方法は、再生データの先頭領域から位相誤差及び周波数誤差を検出し、検出した位相誤差及び周波数誤差をなくすように再生データを初期補正することを特徴とする。
【0029】
情報記録再生方法の詳細としては、
固定クロックによりヘッド再生信号を離散化したデータをバッファに書込み、バッファへのデータ書込みと並行してデータの先頭領域から位相誤差を検出し、
バッファへのデータ書込みと並行してデータ先頭領域から周波数誤差を検出し、
位相誤差及び周波数誤差の補正状態を初期設定した後に、バッファからデータを読出しながら先頭領域で位相引き込み及び周波数引き込みを行う、
ことを特徴とする。
【0030】
ここで再生データは、プリアンブル、シンクマーク及びユーザデータで構成されたセクタデータであり、プリアンブルから位相誤差及び周波数誤差を検出して初期補正する。バッファは、再生データの先頭領域の書込み終了した時点で書込みデータの先頭からの読出しを開始する。
【0031】
本発明の別の形態にあっては、周波数オフセットのみを検出して補償してもよい。即ち、情報を磁気記録媒体上に記録して再生する情報記録再生方法に於いて、再生データの先頭領域から周波数誤差を検出し、検出された周波数誤差をなくすように再生データを初期補正することを特徴とする。
【0032】
この方法の詳細としては、
固定クロックによりヘッド再生信号を離散化したデータをバッファに書込み、バッファへのデータ書込みと並行してデータ先頭領域から周波数誤差を検出し、
周波数誤差の補正状態を初期設定した後に、バッファからデータを読出しながら先頭領域で位相引き込み及び周波数引き込みを行う。
(情報記録再生装置その2)
本発明は、ヘッドで読み出されたアナログ波形から、ディジタルデータを復号する際に最適な判定タイミングを再生するタイミングリカバリ部(ディジタルPLLで構成されるタイミング再生ループ)で、サンプリングされた信号から最適なタイミングとの位相誤差を検出して補正する。
【0033】
特に、ハードディスクにおいてデータをリード/ライトする最小単位はセクタと呼ばれ、プリアンブル、シンクバイトに続きデータが記録される。プリアンブルは、周期的なデータパターンが書き込まれ、ヘッドから読み出されたリード波形は正弦波となる。この周期波形を読み出しながら、タイミング再生ループの同期を確立する。
【0034】
シンクバイトには、特定のパターンが書き込まれている。リードチャネルLSIは、このシンクバイトでデータの先頭位置を認識し、データのバイト単位の同期を確立する。また、低S/Nのリード信号でも、安定したタイミング再生ループの安定した動作を得るために、プリアンブルで定常位相誤差を低減する必要がある。
【0035】
このため、本発明は、情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部(タイミング再生ループ)と、セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、周期的なリファレンス信号とサンプル信号の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、検出した位相誤差によりタイミングリカバリ部を補正してループ動作を開始させる位相オフセット検出器とを備えたことを特徴とする。
【0036】
ここで、位相オフセット検出器は、相関として、リファレンスとなる正弦信号又は余弦信号とサンプリング信号の積を、リファレンス正弦信号の周期の整数倍長の区間で加算平均して求める。
【0037】
このような本発明の初期位相誤差(位相オフセット)の検出によれば、複数サンプルの加算平均で相関を求めることで、位相誤差を検出する際にノイズ影響を抑えることができる。また信号判定によるレベル比較が不要なため、判定誤りによる位相誤差の変化が生じにくい。
【0038】
タイミング再生ループを構成するタイミングリカバリ部は、補間フィルタから出力されたシンボルレートのサンプリング信号と判定器からのシンボル判定信号との位相誤差を検出する誤差検出器と、誤差検出器からの位相誤差を積分するループフィルタと、ループフィルタの出力を積分して位相誤差をなくすように補間フィルタの係数を制御するアキュームレータとを備え、位相オフセット検出器で検出した位相誤差によりアキュームレータを初期化してゼロ位相スタートを行わせる。
【0039】
このように補間フィルタと同タイミングの信号で初期位相誤差を算出するために、正確な初期位相誤差をフィードバックすることができ、ループの引き込みが早くなる。
【0040】
本発明は、情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、周期波形のリファレンス信号とシンボルレートに対しオーバーサンプリングしたサンプリング信号の相関から信号ポイントとサンプリングポイントとの位相誤差を検出して補正し、補正した位相誤差によりタイミングリカバリ部を補正して動作を開始させる位相オフセット検出器とを備えたことを特徴とする。
【0041】
このように本発明では、オーバーサンプリングによる位相補正が加わるので、シンボルレートでの判定時の誤差を最小にできる。勿論、正確な初期位相誤差をフィードバックすることで、ループの引き込みが早くなる。
【0042】
ここで位相オフセット検出器は、リファレンス信号を正弦信号とした場合、オーバーサンプリングしたサンプリング信号との相関から検出された位相誤差に正弦信号の位相をシフトして補正する。
【0043】
また位相オフセット検出器は、リファレンス信号を余弦信号とした場合、オーバーサンプリングされたサンプリング信号との相関から検出された位相誤差に余弦信号の位相をシフトして補正しても良い。
【0044】
更に、記録密度の向上により符号間干渉の影響が大きくなり、PR方式のターゲット応答が複雑化し、プリアンブルパターンでの応答が非対称になり、プリアンブルでも多値判定器が必要とされている。そこで本発明の位相オフセット検出器は、非対称なプリアンブル波形では、プリアンブルの応答が対称となるように入力波形の位相をシフトして、連続する2サンプルのレベル比較で位相誤差を算出できるようにする。
【0045】
この場合のタイミングリカバリ部は、補間フィルタから出力されたシンボルレートのサンプリング信号と判定器からのシンボル判定信号との位相誤差を検出する誤差検出器と、誤差検出器からの位相誤差を積分するループフィルタと、ループフィルタの出力を積分して位相誤差をなくすように補間フィルタの係数を制御するアキュームレータとを備え、位相オフセット検出器で検出した位相誤差によりアキュームレータを初期化してゼロ位相スタートを行わせる。
【0046】
また磁気記録再生装置におけるライト動作とリード動作間のシンボルレートの周波数の差である周波数オフセット(初期周波数誤差)は、高密度記録化に伴って増加しつつあり、引き込み時間と定常位相誤差の増加させる要因となっている。
【0047】
そこで本発明の情報を磁気記録媒体上に記録して再生する情報記録再生装置にあっては、固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、プリアンブル区間を正弦波で近似したリード波形の整数倍長で複数のブロックに分割し、各ブロック毎にサンプリング波形とリファレス波形との位相誤差を求め、所定ブロック数に亘る位相誤差の変化率から初期周波数誤差(周波数オフセット)を検出し、検出した初期周波数誤差によりタイミングリカバリ部を補正してループ動作を開始させる周波数オフセット検出器とを備えたことを特徴とする。
【0048】
このように本発明は、プリアンブル区間で、予め周波数オフセットを検出し、この値でループフィルタを初期化することで、周波数オフセットの引き込み量がゼロ状態でループを引き込むことができ、定常位相誤差及び引き込み時間を改善できる。さらに、周波数オフセットの引き込み可能レンジを広げることもできる。
【0049】
この場合のタイミングリカバリ部は、補間フィルタから出力されたシンボルレートのサンプリング信号と判定器からの判定信号との位相誤差を検出する誤差検出器と、誤差検出器からの位相誤差を積分するループフィルタと、ループフィルタの出力を積分して位相誤差をなくすように補間フィルタの係数を制御するアキュームレータとを備え、周波数オフセット検出器で検出した周波数誤差によりループフィルタを初期化してループ動作を開始させる。
【0050】
信号補間型のタイミング再生ループを構成するタイミングリカバリ部には、オーバーサンプリングされた信号を等化するオーバーサンプリング等化器が設けられているが、等化器係数のトレーニングに必要な判定誤差はシンボルレートの信号であり、判定誤差をトレーニングのために直接フィードバックすることができない。
【0051】
そこで、本発明の情報を磁気記録媒体上に記録して再生する情報記録再生装置にあっては、シンボルレートのリード信号を入力して非同期にオーバーサンプリングしたサンプリング信号を出力するADコンバータと、オーバーサンプリングされたサンプリング信号を波形等化するオーバーサンプリング等化器と、等化信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、補間フィルタの出力信号と判定器の判定信号から求めたシンボルレートの判定誤差をオーバーサンプリング等化器のトレーニングにフィードバックする時に、判定誤差をサンプリングレートの信号に逆補間するトレーニング回路とを設けたことを特徴とする。
【0052】
このトレーニング回路は、判定誤差をシンボルレートからサンプリングレートを逆補間する信号処理回路を備え、この信号処理回路に補間フィルタの係数を設定する。
【0053】
このよう本発明では、シンボルレートでの判定誤差を逆補間してサンプリングレートとすることで、オーバーサンプリング等化器のトレーニングに従来のLMS法を採用でき、判定誤差の自乗平均がゼロになるようにオーバーサンプリング等化器の係数をトレーニングすることができる。
【0054】
また情報記録再生装置は、シンボルレートの判定誤差の平均とオーバーサンプリングリング等化器の係数の総和との積がゼロになるように、ADコンバータの入力信号に加算する直流信号を制御して直流オフセットをキャンセルする直流オフセットキャンセル制御ループを設けたことを特徴とする。
【0055】
更に本発明の情報記録再生装置は、シンボルレートの判定誤差の積の平均がゼロになるように、ADコンバータの入力信号の振幅を制御する自動利得制御ループを設けたことを特徴とする。
【0056】
このためヘッドからのリード信号に重畳する直流オフセットのキャンセル及び信号振幅を一定にする自動利得制御のフィードバックループでも、シンボルレートの判定誤差の自乗平均がゼロになるように制御することが可能になる。
(信号復号回路その2)
本発明は、情報を磁気記録媒体上に記録して再生するリードチャネルLSIとしての信号復号回路を提供する。この信号復号回路は、固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、セクタ内のプリアンブル区間におけるリード信号を周期的な信号の正弦波として近似的に扱い、この正弦波のリファレンス信号とサンプル信号の相関からシンボルレートとサンプリングタイミングとの位相誤差を検出し、検出した位相誤差によりタイミングリカバリ部を補正してループ動作を開始させる位相オフセット検出器とを備えたことを特徴とする。
【0057】
また本発明の信号復号回路は、固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、周期波形のリファレンス信号とシンボルレートに対しオーバーサンプリングしたサンプリング信号の相関から、シンボルレートとサンプリングタイミングとの位相誤差を検出し、検出した位相誤差によりタイミングリカバリ部を補正して動作を開始させる位相オフセット検出器とを備えたことを特徴とする。
【0058】
また本発明の信号復号回路は、固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、プリアンブル区間を正弦波に近似したリード波形の整数倍長で複数のブロックに分割し、各ブロック毎にサンプリング波形とリファレンス波形との位相誤差を求め、所定ブロック数に亘る位相誤差の変化率から周波数誤差を検出し、検出した周波数誤差によりタイミングリカバリ部を補正してループ動作を開始させる周波数オフセット検出器とを備えたことを特徴とする。
【0059】
また本発明の信号復号回路は、アナログのリード信号を入力して非同期にオーバーサンプリングしたサンプリング信号を出力するADコンバータと、オーバーサンプリングされたサンプリング信号を波形等化するオーバーサンプリング等化器と、等化信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、補間フィルタの出力信号と判定器の判定信号から求めたシンボルレートの判定誤差をオーバーサンプリング等化器のトレーニングにフィードバックする時に、判定誤差をサンプリングレートの信号に逆補間するトレーニング回路とを備えたことを特徴とする。
【0060】
本発明の信号復号回路は、更に、シンボルレートの判定誤差の平均とオーバーサンプリングリング等化器の係数の総和との積がゼロになるように、前記ADコンバータの入力信号に加算する直流信号を制御して直流オフセットをキャンセルする直流オフセットキャンセル制御ループを設けたことを特徴とする。
【0061】
本発明の信号復号回路は、更に、シンボルレートの判定誤差の積の平均がゼロになるように、ADコンバータの入力信号の振幅を制御する自動利得制御ループを設けたことを特徴とする。尚、本発明の信号復号回路における詳細は、情報記録再生装置の場合と同じになる。
(情報記録再生方法その2)
本発明は、情報記録再生方法を提供する。即ち、本発明は、情報を磁気記録媒体上に記録して再生し、再生されたリード信号を固定クロックによりオーバーサンプリングして等化した後に補間してシンボルレートにダウンサンプリングして判定するタイミングリカバリ部を備えた情報記録再生方法に於いて、
セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、周期波形のリファレンス波形とサンプル波形の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、
検出した位相誤差によりタイミングリカバリ部を補正してループ動作を開始させる、
ことを特徴とする。
【0062】
また本発明は、情報を磁気記録媒体上に記録して再生し、再生されたリード信号を固定クロックによりオーバーサンプリングして等化した後に補間してシンボルレートにダウンサンプリングして判定するタイミングリカバリ部を備えた情報記録再生方法に於いて、
セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、周期波形のリファレンス信号とシンボルレートに対しオーバーサンプリングしたサンプリング信号の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、
検出した位相誤差によりタイミングリカバリ部を補正して動作を開始させる、ことを特徴とする。
【0063】
また本発明は、情報を磁気記録媒体上に記録して再生し、再生されたリード信号を固定クロックによりオーバーサンプリングして等化した後に補間してシンボルレートにダウンサンプリングして判定するタイミングリカバリ部を備えた情報記録再生方法に於いて、
プリアンブル区間を正弦波に近似したリード波形の整数倍長で複数のブロックに分割し、
各ブロック毎にサンプリング波形とリファレス波形との位相誤差を求め、
所定ブロック数に亘る位相誤差の変化率から周波数誤差を検出し、
検出した周波数誤差によりタイミングリカバリ部を補正してループ動作を開始させる、
ことを特徴とする。尚、本発明の情報記録再生方法における詳細は、情報記録再生装置の場合と同じになる。
(等化器トレーニング方法)
本発明は、等化器トレーニング方法を提供する。即ち本発明は、情報を磁気記録媒体上に記録して再生し、再生されたリード信号を固定クロックによりオーバーサンプリングして等化器で等化した後に補間フィルタで補間してシンボルレートにダウンサンプリングして判定する情報記録再装置の等化器トレーニング方法に於いて、
補間された信号と判定信号から求めたシンボルレートの判定誤差を等化器のトレーニングにフィードバックする時に、判定誤差をサンプリングレートの信号に逆補間することを特徴とする。
【0064】
本発明の等化器トレーニング方法は、更に、シンボルレートの判定誤差の平均とオーバーサンプリング等化器の係数の総和との積がゼロになるように、オーバーサンプリング前の入力信号に加算する直流信号を制御して直流オフセットをキャンセルすることを特徴とする。
【0065】
本発明の等化器トレーニング方法は、更に、シンボルレートの判定誤差の積の平均がゼロになるように、オーバーサンプリング前の入力信号の振幅を制御することを特徴とする。尚、本発明の等化器トレーニング方法における詳細は、情報記録再生装置の場合と同じになる。
【0066】
【発明の実施の形態】
<目 次>
(1.基本的な実施形態)
(2.位相オフセットによるゼロ位相スタートの詳細)
(3.周波数オフセット検出の詳細)
(4.オーバーサンプリング等化器のトレーニング)
(5.直流オフセットキャンセル制御と自動利得制御)
【0067】
(1.基本的な実施形態)
図2は、本発明が適用されるハードディスクドライブのブロック図である。図2において、ハードディスクドライブは、SCSIコントローラ10、ドライブコントロール12及びディスクエンクロージャ14で構成される。勿論、ホストとのインタフェースはSCSIコントローラ10に限定されず、適宜のインタフェースコントローラが使用できる。
【0068】
SCSIコントローラ10には、MCU(メインコントロールユニット)16、制御記憶として使用されるDRAMもしくはSRAMを用いたメモリ18、制御プログラムを格納するフラッシュメモリなどの不揮発性メモリを使用したプログラムメモリ20、ハードディスクコントローラ(HDC)22及びデータバッファ24が設けられる。
【0069】
ドライブコントロール12には、ドライブインタフェースロジック26、DSP28、リードチャネル(RDC)30及びサーボドライバ32が設けられる。更にディスクエンクロージャ14にはヘッドIC34が設けられ、ヘッドIC34に対し記録ヘッドと再生ヘッドを備えた複号ヘッド36−1〜36−6を接続している。
【0070】
複号ヘッド36−1〜36−6は磁気ディスク38−1〜38−3の各記録面に対し設けられ、VCM40によるロータリアクチュエータの駆動で磁気ディスク38−1〜38−3の任意のトラック位置に移動される。磁気ディスク38−1〜38−3はスピンドルモータ42により一定速度で回転される。SCSIコントローラ10のハードディスクコントローラ22には、フォーマッタやECC処理部を設けられる。
【0071】
リードチャネル30には、データ記録部46とデータ再生部48が設けられる。データ再生部48は、ハードディスクコントローラ22からCRC符号とECC符号が付加されたデータを入力し、PLLによるクロック再生を安定化するためのRLL符号化を行った後に、磁化反転が隣接する箇所で反転間隔を多少広げるための書込補償を行い、そしてドライバによりヘッドIC34を駆動して記録ヘッドへのガイド電流を発生し、媒体上に記録する。
【0072】
データ再生部48は、ヘッドIC34に内蔵したプリアンプにより増幅された再生ヘッドからのアナログ電圧を入力してデータを復調する。復調したデータは、ハードディスクコントローラ22に送られ、ECC復号によるエラー訂正とCRC復号による検査処理を経て復号データとして出力される。
【0073】
図3は、本発明のタイミングリカバリ部100を備えた図2のデータ再生部48のブロック図である。
【0074】
図3において、へッドIC34から出力されたヘッド再生信号は、可変利得アンプ(VGA)50、ローパスフィルタとして機能するCTフィルタ52、ADコンバータ54を経由してディジタル信号に変換された後、FIRフィルタ56で波形等化を受け、等化済み信号としてセクタ単位でバッファ62に書き込まれる。
【0075】
利得制御器58は可変利得アンプ50の利得を制御し、ヘッド再生信号を一定振幅に補正する。またADコンバータ54は、クロック発振器60からのクロックによりヘッド再生信号をサンプリングして離散化することにより、ディジタル信号に変換している。このサンプリングのためのクロック発振器60からのクロックは、ヘッド再生信号と非同期の固定クロックとなる。
【0076】
バッファ62に格納されたセクタデータは、セクタデータ先頭のプリアンブル領域の書込みが終了した時点で書込データの先頭からの読出しが開始され、等化済信号xとしてFIR補間フィルタ64に入力される。
【0077】
ここでFIR補間フィルタ64、ビタビ判定器66,誤差検出器76、ループフィルタ74及びディジタルアキュームレータ65を含むループは、ディジタルPLLを構成している。このディジタルPLLは、まず、電圧制御されないクロック発振器60からのフリー・ランニングのクロックによりADコンバータ54を駆動し、非同期にサンプリングする。また誤差検出器76及びループフィルタ74は従来と同じでよいが、VCOは、ディジタルアキュームレータ65とFIR補間フィルタ64で置き換える。ディジタルアキュームレータ65は、積分動作を行い、一方、FIR補間フィルタ64はシンボルレートに同期したサンプルを行うリ・サンプラとして動作する。
【0078】
このディジタルアキュームレータ65とFIR補間フィルタ64の組み合わせによりディジタルVCO75が構成され、全体的な動作は従来のPLLと同じになる。
【0079】
ビタビ判定器66は、等化済みの信号yについてビタビアルゴリズムにより正しい信号y∧を判定し、RLL復号器68でRLL復号を行って、ハードディスクコントローラ側に出力する。
【0080】
本発明のタイミングリカバリ部100には、更に位相オフセット検出器70と周波数オフセット検出器72が設けられている。
【0081】
位相オフセット検出器70は、ADコンバータ54から出力されるセクタデータ先頭のプリアンブル領域を入力して位相オフセット(初期位相誤差)Δτ0を検出し、この検出した位相オフセットΔτ0をディジタルアキュームレータ65にプリセットする。
【0082】
また周波数オフセット検出器72は、ADコンバータ54から出力されるセクタデータ先頭のプリアンブル領域を入力して周波数オフセット(初期周波数誤差)Δf0を検出し、この検出した周波数オフセットΔf0をループフィルタ74にプリセットする。
【0083】
位相オフセット検出器70の検出処理によりディジタルアキュームレータ65に位相オフセットΔτ0がプリセットされ、また周波数オフセット検出器72の検出処理によりループフィルタ74に周波数オフセットΔf0がプリセットされると、バッファ62はプリアンブル領域の書込み終了時点で、書込みの済んだデータの先頭からの読出しを開始する。
【0084】
このバッファ62からのデータ読出しに同期して、誤差検出器76、ループフィルタ74、ディジタルVCO75を構成するディジタルアキュームレータ65とFIR補間フィルタ64によるディジタル的なPLL動作により、プリアンブル領域のデータに対する位相引き込み及び周波数引き込みを行った後、プリアンブルデータに続くユーザデータに対し、サンプルレートのサンプリング信号のタイミングを、シンボルレートとなる正しいクロックのタイミングに追従させるためのタイミングリカバリが行われる。
【0085】
図4は、図3のタイミングリカバリ部100に設けている周波数オフセット検出器72の実施形態を、位相オフセット検出器70と共に示している。
【0086】
図4において、ADコンバータ54からのデータ出力について、レジスタ78にn個のサンプルデータa(0)〜a(n)が保持される。このレジスタ78に保持されたサンプルデータa(0)〜a(n)は位相オフセット検出器70に入力され、位相オフセットΔτ0が検出される。
【0087】
ここでプリアンブル領域の再生信号をサイン波形とみなすと、位相オフセット検出器70にあっては、各サンプル点での位相誤差Δτ(i)を次式を使用して求めることができる。
【0088】
【数1】

この(1)式を用いて位相オフセット検出器70にあってはn個の位相誤差の平均値を求め、これを位相オフセットΔτ0としてループフィルタに出力する。
【0090】
周波数オフセット検出器72は、位相誤差レジスタ80、減算器82−1〜82−m、及び平均演算器84で構成される。位相誤差レジスタ80には、位相オフセット検出器70でn個のサンプル点ごとに算出されたm個の位相オフセット平均値Δτ(0)〜Δτ(m)が保持される。ここでi番目の位相オフセット平均値をΔτ(i)とすると、このときの周波数オフセットΔf(i)は次式で求められる。
【0091】
【数2】
減算器82−1〜82−mは(2)式に従ってそれぞれの周波数オフセットΔf(0)〜Δf(n−1)を算出する。減算器82−1〜82−mの出力は平均演算器84に入力され、各周波数オフセットの平均値を算出し、これを周波数オフセットΔf0としてループフィルタ74にプリセットする。
【0093】
なお周波数オフセットの検出方法は、図4の実施形態以外に、位相オフセットをプリアンブル領域全体について保持しておき、その後にこれを微分して算出するなど、他の方法も適用できる。
【0094】
図5は、図3のFIR補間フィルタ64のブロック図であり、タイミングリカバリ部100のループフィルタ74及びディジタルアキュームレータ65と共に示している。
【0095】
図5において、ループフィルタ74には、図3の誤差検出器76よりFIR補間フィルタ64の出力信号yとビタビ判定器66で判定された正しい信号y∧から求めた位相誤差Δτが入力され、また図4に示した位相オフセット検出器70と周波数オフセット検出器72で検出された位相オフセットΔτ0ディジタルアキュームレータ65にプリセットされ、周波数オフセットΔf0がループフィルタ74にプリセットされる。
【0096】
このため、バッファ62からのセクタデータの読出しが開始されると、ループフィルタ74及びディジタルアキュームレータ65はプリセットされた位相オフセットΔτ0によりゼロ位相スタートによる位相引き込みを行い、またループフィルタ74にプリセットされた周波数オフセットΔf0により誤差を補正した周波数引き込みを行い、素早くタイミングリカバリのための安定したPLLループ動作に入る。
【0097】
FIR補間フィルタ64はk段の遅延回路88−1〜88−kを備え、乗算器90−1〜90−kにより係数テーブル86で与えられる位相誤差Δμに応じたタップ係数C0〜Ckを乗算した後、加算器92−2〜92−kで総和をとって、シンボルレートの正しいタイミングとした信号yを出力する。
【0098】
このような位相オフセットΔτ0による位相引き込みに加え、周波数オフセットΔf0による周波数引き込みが、バッファ62から読み出されたセクタデータのプリアンブルに対し行われるため、従来の位相オフセットのみのプリセットしたタイミングリカバリに比べ、本来のクロックに対し、再生データに周波数オフセットが起きていても、短時間で本来のクロックに同期したタイミング状態への位相及び周波数引き込みを早く行うことができる。
【0099】
図6は、図3における本発明のタイミングリカバリによる動作のタイムチャートである。図6(A)はADコンバータ54の出力であり、セクタデータの先頭部分を示しており、プリアンブル94に続いてシンクマーク96が設けられ、その後ろにユーザデータ98が続いている。
【0100】
このADコンバータ54からの出力データは、バッファ62に書き込まれると同時に、位相オフセット検出器70及び周波数オフセット検出器72に入力され、図6(C)のプリアンブル94の先頭部分で位相オフセット算出101が行われ、これに並行して図6(D)のようにプリアンブル94の全領域を使用して周波数オフセット算出102が行われる。
【0101】
そしてバッファ62にプリアンブル94の書込みが終了した時で、ディジタルアキュームレータ65には検出された位相オフセットΔτ0がプリセットされ、またループフィルタ74には検出された周波数オフセットΔf0がプリセットされ、それぞれのオフセットの補正条件が初期設定される。
【0102】
バッファ62に対しADコンバータ54の出力のプリアンブル94の書込みが終了すると、その後の書込みに並行して書込済みのセクタデータの先頭、即ち図6(B)のようにプリアンブル94−1からの読出しによるバッファ出力が開始される。
【0103】
このバッファ出力に対し、本発明によるタイミングリカバリ部100が動作し、位相オフセットΔτ0及び周波数オフセットΔf0のプリセットにより、位相オフセット及び周波数オフセットの両方について、誤差をなくしたゼロ状態とした位相引き込み104を開始し、その後、プリアンブル94−1のデータを使用して周波数・位相引き込み106を行う。
【0104】
このようなタイミングリカバリ動作の開始時点の位相オフセット及び周波数オフセットの両方を補正した状態でのゼロスタートによる引き込み動作により、周波数及び位相を本来のクロックのタイミングに合わせる引き込み動作を短時間で完了することができる。
【0105】
このため図6のセクタデータに示すプリアンブル94,94−1の長さは、図41(A)に示した従来のタイミングリカバリ部による位相オフセットのみの補正状態によるフェーズゼロスタートのプリアンブル1223に対し、プリアンブルのデータ長が短いデータ長のフォーマット構成となっている。
【0106】
このように本発明のタイミングリカバリによると、セクタデータ先頭のプリアンブルを短くできるため、磁気ディスク全体としてのフォーマット効率を高めることができるる
プリアンブル94−1のデータによる周波数・位相引き込み106が完了すると、これに続くシンクマーク96−1及びユーザデータ98−1については、誤差検出器76からの位相情報に基づくFIR補間フィルタ64の補間動作で、サンプリングデータのサンプルタイミングを、シンボルレートとなる本来のクロックにおける周波数及び位相に追従させるPLL動作がディジタル的に実行される。
【0107】
図7(A)は、プリアンブル領域のヘッド再生信号に位相オフセットが発生した場合の信号波形図であり、左側にプリアンブル領域の先頭部分の波形を示し、右側にプリアンブル領域の終端部分の波形を示し、中間は省略している。
【0108】
図7(A)において、図3のクロック発振器60からの固定クロックによる正しいタイミングで得られるヘッド再生信号110を破線で表わし、これに対し位相オフセットを持ったヘッド再生信号112を実線で表わしている。
【0109】
図3のADコンバータ54は、固定クロックにより時間軸に一定間隔で示した縦線のタイミングでヘッド再生信号をサンプリングしており、このため位相オフセットのない正しいヘッド再生信号110の白丸のサンプル点の値に対し、位相オフセットΔτを持った実際のヘッド再生信号112は三角のサンプル点の値となってしまう。
【0110】
そこで図3の位相オフセット検出器70で、この位相オフセットΔτを検出してループフィルタ74にプリセットしてFIR補間フィルタ64によって補間処理を行わせることで、例えば図7(A)の先頭の位相オフセットを持つヘッド再生信号112のサンプル点S1を、正しいクロックタイミングとしたときの白丸のサンプル点S1'となるように補間処理を行っている。
【0111】
図7(B)は、プリアンブル領域のヘッド再生信号について、周波数オフセットがあった場合の信号波形図であり、左側にプリアンブル領域の先頭部分の波形を示し、右側にプリアンブル領域の終端部分の波形を示し、中間は省略している。
【0112】
ここで破線のヘッド再生信号110は周波数オフセットがない場合の信号波形であり、これに対し実際に得られた実線のヘッド再生信号114が例えばマイナスの周波数オフセットΔfを持っていたとすると、例えばプリアンブル領域の先頭で一致している波形がプリアンブル領域の終端に向かうに従って位相ずれが増加する波形となる。
【0113】
このような周波数オフセットΔfを図3の周波数オフセット検出器72で検出してループフィルタ74にプリセットし、FIR補間フィルタ64で補間処理を行わせることで、例えば図7(B)の先頭から5番目の周波数誤差のあるヘッド再生信号114の三角サンプル点S5を、周波数オフセットΔfに応じた白丸のサンプル点S5’となるように補間している。
【0114】
図8は、図2のデータ再生部48の他の実施形態のブロック図であり、バッファ62をFIRフィルタ56の前段に設け、波形等化前の信号を書き込むようにしたことを特徴とする。これ以外の構成及び動作は図3の実施形態と同じである。
【0115】
図9は、図10の従来例と同じヘッド再生信号に対しクロック同期となるデータ再生部48に本発明のタイミングリカバリ部を設けた他の実施形態のブロック図でである。
【0116】
図9において、再生ヘッドからのアナログ電圧はヘッドICのプリアンプによって増幅した後、可変利得アンプ(VGA)50、CTフィルタ52、ADコンバータ(ADC)54を経由してディジタル信号に変換される。続いてFIRフィルタ56によって波形等化を行った後、ビタビ判定器66で復号を行い、更に復号されたデータはRLL復号器68で復号される。
【0117】
タイミングリカバリ部100は、誤差検出器76、ループフィルタ74及びクロック発振器60−1によりADコンバータ54でヘッド再生信号をサンプリングするクロックのタイミングを制御するPLLを構成している。また可変利得アンプ(VGA)50には利得制御器58−1が設けられ、利得を制御して振幅を補正する。
【0118】
即ち、クロック同期に対応したタイミングリカバリ部100は、FIRフィルタ56の出力信号yとビタビ判定器66からの判定値y∧を用いて位相誤差Δτを求め、この位相誤差をなくすようにクロック発振器60−1の発振周波数を制御する。これによりADコンバータ54のサンプリング位置が制御されるフィードバックループが形成される。
【0119】
またゲインエラーΔGをFIRフィルタ56の出力信号yとその判定値y∧を用いて求め、ゲインエラーをなくすように利得制御器58−1の制御電圧を調整して可変利得アンプ(VGA)50により振幅補正を行う。
【0120】
更に、タイミングリカバリ部100には位相オフセット検出器70と周波数オフセット検出器72が設けられる。位相オフセット検出器70は、ADコンバータ54から出力されるセクタデータ先頭のプリアンブル領域を入力して位相オフセットΔτ0を検出し、この検出した位相オフセットΔτ0をループフィルタ74にプリセットする。
【0121】
また周波数オフセット検出器72は、ADコンバータ54から出力されるセクタデータ先頭のプリアンブル領域を入力して周波数オフセットΔf0を検出し、この検出した周波数オフセットΔf0をループフィルタ74にプリセットする。
【0122】
位相オフセット検出器70及び周波数オフセット検出器72の検出処理によりループフィルタ74に位相オフセットΔτ0および周波数オフセットΔf0のプリセットが済むと、誤差検出器76及びループフィルタ74によるPLL動作により、電圧制御発振器60−1においてプリアンブル領域のデータに対する位相引き込み及び周波数引き込みを行った後、プリアンブルデータに続くユーザデータに対し、ヘッド再生信号にクロックの周波数及び位相に追従させるためのタイミングリカバリ動作が行われる。
【0123】
この位相オフセット検出器70と周波数オフセット検出器72の構成及び動作は図3の実施形態と基本的に同じになる。
【0124】
(2.位相オフセットによるゼロ位相スタートの詳細)
図10は、本発明による信号補間型のタイミング再生を行うタイミングリカバリ部を備えた他の実施形態のブロック図である。
【0125】
図10において、へッドICから出力されたリード信号は、可変利得アンプ(VGA)50、ローパスフィルタとして機能するCTフィルタ(連続時間フィルタ)52を通過後、クロック発振器60からの固定クロックにより動作するADコンバータ54で非同期にサンプリングされてディジタル信号に変換された後、セクタ単位でバッファ62に書き込まれる。
【0126】
バッファ62に格納されたセクタデータは、セクタデータ先頭のプリアンブル領域の所定位置までの書込みが終了した時点で書込データの先頭からの読出しが並行して開始され、FIRフィルタ56による等化済み信号としてFIR補間フィルタ64に入力される。
【0127】
ここでFIR補間フィルタ64、ビタビ判定器66、誤差検出器76、ループフィルタ74及びディジタルアキュームレータ65を含むループは、ディジタルPLLを構成している。これは図42の従来のPLLをディジタル化したもので、VCOを除き容易にディジタル化できる。
【0128】
このPLLのディジタル化は、まず、電圧制御されないクロック発振器60からのフリー・ランニングの固定クロックによりADコンバータ54を駆動し、非同期にサンプリングする。
【0129】
また誤差検出器76及びループフィルタ74は従来と同じでよいが、VCOは、ディジタルアキュームレータ65とFIR補間フィルタ64で置き換える。ディジタルアキュームレータ65は、従来のVCOに設けている積分器と同じ動作を行い、一方、FIR補間フィルタ64はシンボルレートに同期したサンプルを行うリ・サンプラとしての役割を果たす。
【0130】
このディジタルアキュームレータ65とFIR補間フィルタ64の組み合わせによりディジタルVCO75が構成され、従来のVCOとVCOにより制御されるADコンバータの組み合わせと同じになり、そのため、PLLの全体的な動作は変わりない。
【0131】
またADコンバータ54は、記録チャネルのシンボルレートに対し早いサンプリングレートとなるオーバーサンプリングを行っている。このオーバーサンプリングのため、クロック発振器60は、シンボルレートの周波数に対し数パーセント程度高いクロック周波数を発振している。
【0132】
判定器として機能するビタビ判定器66は、タイミングリカバリ部100によってタイミングリカバリされたシンボルレートのタイミングをもつ等化済みの信号yについてビタビアルゴリズムにより正しい信号y∧を判定し、RLL復号器68でRLL復号を行って、ハードディスクコントローラ側に出力する。
【0133】
更に本発明のタイミングリカバリ部100には、位相オフセット検出器70と周波数オフセット検出器72が設けられている。
【0134】
位相オフセット検出器70は、ADコンバータ54から出力されるセクタデータ先頭のプリアンブル領域を入力して位相オフセット(初期位相誤差)Δτを検出し、この検出した位相オフセットΔτをディジタルアキュームレータ65にプリセットして初期化することで、ディジタルPLLループでのゼロ位相スタートによりループ引き込みを早くする。
【0135】
また周波数オフセット検出器72は、ADコンバータ54から出力されるセクタデータ先頭のプリアンブル領域を入力して周波数オフセットΔfを検出し、この検出した周波数オフセットΔfをループフィルタ74にプリセットする。
【0136】
位相オフセット検出器70及び周波数オフセット検出器72の検出処理によりディジタルアキュームレータ65に対する位相オフセットΔτのプリセット及びループフィルタ74に対する周波数オフセットΔfのプリセットが済むと、バッファ62はプリアンブルの書込み終了時点で、書込みの済んだデータの先頭からの読出しを開始する。
【0137】
このバッファ62からのデータ読出しに同期して、誤差検出器76、ループフィルタ74、ディジタルアキュームレータ65及びFIR補間フィルタ64によるディジタル的なPLL動作により、プリアンブル領域のデータに対する位相引き込み及び周波数引き込みを行った後、プリアンブルデータに続くユーザデータに対し、シンボルレートの正しいクロックの周波数及び位相に追従させるためのタイミングリカバリが行われる。
【0138】
また誤差検出器76からの判定誤差をFIRフィルタ56にフィードバックしてトレーニングするトレーニング回路116を設けている。トレーニング回路116は、シンボルレートの判定誤差を等化器として機能するFIRフィルタ56にトレーニングのためにフィードバックする時に、この判定誤差をサンプリングレートの判定誤差に逆補間する。またプリアンブル信号区間については、その時の判定誤差がトレーニングに使用されないように拘束条件を設定している。
【0139】
また直流オフセット除去ループフィルタ118、DAコンバータ120及びアナログ加算器122によって、ADコンバータ54の入力信号に重畳される直流オフセットをゼロとするように制御する直流オフセットキャンセルの制御ループを設けている。この直流オフセットキャンセルのループ制御は、後の説明で明らかにするように、判定誤差の平均とFIRフィルタ56のタップ係数の総和との積がゼロとなるように制御する。
【0140】
更に、AGCループフィルタ124およびDAコンバータ126によって、ADコンバータ54に対する入力信号の振幅を一定に保つように利得制御器58によって可変利得アンプ50を制御するAGC制御ループを設けている。このAGCループ制御は、後の説明で明らかにするように、FIR補間フィルタ64の出力と判定誤差の積の平均がゼロとなるように制御する。
【0141】
図11は、図10の実施形態のタイミングリカバリ部100に対応したADコンバータ54、FIRフィルタ56、FIR補間フィルタ64、誤差検出器76、ループフィルタ74、ディジタルアキュームレータ65、及び位相オフセット検出器70の部分を取出しており、FIR補間フィルタ64については係数テーブル86を取出して示している。
【0142】
図12は、図11の位相オフセット検出器70及びFIR補間フィルタ64の回路構成の実施形態である。FIR補間フィルタ64は、カスケード接続された遅延回路130−1〜130−7、入力信号及び各遅延出力とタップ係数C4〜C-3を乗算する乗算器132−1〜132−8、及び加算器134で構成される。
【0143】
位相オフセット検出器70は、FIRフィルタ56を構成するカスケード接続された遅延回路136−1〜136−7、加算器138,140,146、乗算器142,148,セレクタ152、レジスタ144,150、及び演算器154で構成され、プリアンブル信号の先頭の8サンプル信号を入力した時点で位相誤差Δτを検出して出力する。
【0144】
この位相オフセット検出器70における演算手順は、サンプリングレートをTsとすると、次のようになる。
(1)時刻kTsと次の時刻(k+1)Tsにおけるサンプリング信号とリファレンス正弦信号との相関Sk及びSk+1を求める。
(2)次の時刻(k+1)Tsにおけるサンプリング信号とリファレンス余弦信号との相関Sk+1を次式により求める。
【0145】
【数3】
プリアンブル信号の位相誤差Δτを次式により求める。
【0147】
【数4】
ここで図12のFIR補間フィルタ64を詳細に説明する。まず図11のADコンバータ54に対する入力信号は
【0149】
【数5】
となる。ここで、xkはバイナリ(+−1)データ系列、h(t)は記録チャネル応答、Tはシンボル周期である。
【0151】
シンボルレートに同期したタイミングリカバリのためには補間フィルタは、g(mT)を出力する必要がある。しかし、ADコンバータ54はサンプリング周期Tsでサンプリングしており、また位相ループには位相誤差μ(Tsで正規化)があり、それゆえFIR補間フィルタ64に対する入力は
【0152】
【数6】
となる。ここで、Nはノイズである。
【0154】
FIR補間フィルタ64のタップ係数は、位相誤差μの関数となる。いまfμ(n)とすると、n=−N2,…,N1はFIR補間フィルタ64のタップ係数であり、FIR補間フィルタ64の理想的な出力は、
【0155】
【数7】
となる。
【0157】
図13は、FIR補間フィルタ64によるサンプルタイミングの補間動作を示している。図13(A)は入力信号として正弦波形のプリアンブル信号160を示しており、オーバーサンプリングによるサンプルレートTsのサンプル点をもっている。このプリアンブル信号160はシンボルレートTのシンボル点をもつ破線のプリアンブル信号162に対し位相誤差μをもっている。
【0158】
この場合の図13(B)の構成をもつFIR補間フィルタ64の出力y(mT)は次のようになる。
【0159】
【数8】
FIR補間フィルタ64は、時刻t=0のタイミングで、そのとき得られている時刻−3Ts〜4Tsのサンプル点と位相誤差μに対応した係数セットに基づき、シンボルレートの正しいタイミングmTでのサンプル点を出力し、これによってサンプルレートTsのサンプル点はシンボルレートTとなって同期が取られる。
【0161】
このようなFIR補間フィルタ64によるシンボルレートでのリ・サンプリングに対し、図12の位相オフセット検出回路70は、図13(A)におけるシンボルレートのプリアンブル信号162に対するオーバーサンプリングされたサンプルレートのプリアンブル信号160の位相誤差を検出し、時刻t=0のシンボル点をそのときの補間出力となるt=mTとなるシンボルレートのサンプル点のタイミングに強制的にずらすことで、所謂ゼロ位相スタートによるディジタルPLL動作を行って位相引きこみを早める。
【0162】
次に図12の位相オフセット検出器70における位相誤差の検出原理を詳細に説明する。図14は、位相比較法による位相誤差の検出方法を説明する。図14(A)のプリアンブル波形164は位相誤差がゼロであり、これに対し図14(B)のプリアンブル波形166は位相誤差Δθをもっている。
【0163】
図14(A)のプリアンブル波形164はシンボルレートをTとすると、周期4Tであり、時刻(k−2)T〜(k+1)Tでサンプル点(ref2)(ref1)(−ref2)(−ref1)をもっている。ここでプリアンプル波形162は正弦波形及び余弦波形とみなせることから、
(ref1)=sinθ
(ref2)=cosθ
となる。
【0164】
そして、図14(A)のプリアンブル波形164をリファレンス信号とし、これに対し図14(B)のプリアンブル波形166をサンプリング信号とすると、サンプリング信号の位相誤差Δθは次式で与えられる。
【0165】
【数9】
本発明の初期位相誤差検出にあっては、セクタ内のプリアンブル区間のリード波形を周期波形、具体的には正弦波として扱い、その相関関数から信号ポイントとサンプリングポイントの位相誤差Δτを検出する。この場合の相関関数はリファレンスとなる正弦信号とサンプリング信号の積をリファレンスとなる正弦信号の周期の整数倍長の区域で加算平均して求めている。
【0167】
図15は、リファレンスを正弦信号とした時の相関Skの算出過程を示している。即ち図15(A)は相関を求めるリファレンス正弦信号の周期の整数倍長の区間の時刻(k−3)Ts〜(k+4)Tsであり、図15(B)に相関Skを算出するための回路ブロックとしてカスケード接続した遅延回路136−1〜136−7と積和演算器168を示している。
【0168】
この積和演算器168は、サンプリング信号Z(t)の時刻(k−3)Ts〜(k+4)Tsの信号ポイントを遅延回路136−1〜136−7のタップからZ(k−3)Ts〜Z(k+4)Tsとして入力し、またリファレンス正弦信号としてr(−3T)〜r(−4T)=1,0,−1,0,1,0,−1,0を入力し、両者の積和の加算平均を求めている。
【0169】
即ちシンボルレートのリファレンス正弦信号r(t)は図14(A)に示したように周期4Tのプリアンブル信号とみなすことができ、
【0170】
【数10】
で表される。この場合、積和演算器168から出力されるリファレンスを正弦信号とした時の相関Skは次式で与えられる。
【0172】
【数11】
ここで、シンボルレートTに対するサンプリングレートTsのオーバーサンプリング率aは
a=T/Ts
で与えられ、例えばオーバーサンプリングはシンボルレートに対し、5%程度高い周波数で行われることから(a−1)は極小さな値となる。
【0174】
図15(B)の積和演算器168に示すようにサンプリング信号Z(kTs)とリファレンス信号r(it)は正弦波であり、時刻kTsで値が0となる奇関数となっている。また時刻kTsから離れるにしたがってサンプリング信号Z(kTs)とリファレンス信号r(it)の位相誤差Δτは、(i/2)aずつ、時刻kTsより前のタイミングでは進み、反対に時刻刻kTsより後ろのタイミングでは遅れることになる。
【0175】
このため時刻kTsから見るとオーバーサンプリングによる位相ずれは相殺され、リファレンス信号を正弦信号とした時の相関Skは次式で近似できる。
【0176】
【数12】
図16は、図15(B)に対し、次の時刻(k+1)Tsにおける相関Sk+1の演算である。この時刻(k+1)Tsにあってはリファレンス正弦信号r(iT)をシンボルレートTだけシフトすることで同様にして相関Sk+1を次式で求めることができる。
【0178】
【数13】
図17はリファレンスを余弦信号とした時の相関を算出するための説明図である。図17にあっては、シンボルレートTのリファレンス正弦信号170をrsin(t)で示し、また同じくシンボルレートTのリファレンス余弦信号172をrcos(t)で示しており、更にサンプリングレートTsのサンプリング信号174をZ(t)として示している。そしてリファレンス正弦信号170とリファレンス余弦信号172はπ/2の位相誤差があり、且つサンプリング信号174に対し(μTs)の位相誤差を生じている。
【0180】
ここでリファレンス信号r(t)がr(t)=rcos(t)の余弦信号となる場合についての相関Ckは次式で与えられる。
【0181】
【数14】
また、次の時刻(k+1)Tsにおけるリファレンスを余弦信号とした場合の相関Ck+1は図16に示したリファレンスを正弦信号とした場合と同様に次式で表される。
【0183】
【数15】
次にプリアンブル波形の相関関数について説明する。リファレンスとなるプリアンブル波形は
r(t)=Asinωt
または
r(t)=Acosωt
で表される。但し、ω=2π/Tであり、Tはシンボルレートである。
【0185】
ヘッドからのリードされたプリアンブル信号を
x(t)=A0sin(ω0t+τ)
または
x(t)=A0cos(ω0t+τ)
とする。このプリアンブル信号x(t)は位相誤差τを除いてほぼリファレンス信号と等しい波形とみなすことができる。
【0186】
【数16】
このためリファレンスのプリアンブル波形信号r(t)とリードされたプリアンブル信号x(t)を掛けた時間平均は、リファレンスのプリアンブル波形r(t)の相関関数Cτとみなすことができ、次式で与えられる。
【0188】
【数17】
ここで相関関数CτをシンボルレートTでサンプリングしたリファレンスのプリアンブル波形r(iT)とリードされたプリアンブル信号x(iT)で表すと
【0190】
【数18】
となる。
【0192】
図18はシンボルレートTとサンプリングレートTsが等しい時の式(1)(11)(12)(13)(15)で与えられる時刻kでの相関Sk,Ckと次の時刻k+1での相関Sk+1,Ck+1について正規化された相関空間についてベクトルで表現したものである。
【0193】
まずベクトル176は、時刻kTにおける相関(Sk,Ck)で与えられ、これに対しプリアンブルパターンでは1T=1Tsの間に位相がπ/2(rad)に進んでベクトル178のように相関(Ck+1,Sk+1)のベクトル178に回転する。
【0194】
図19はシンボルレートTに対し、サンプルレートTsが小さいオーバーサンプリングにおける相関(C,S)の相関空間の説明図である。このオーバーサンプリングの場合には、相関(Ck,Sk)の一次元に存在するベクトル176に対し、次の次元の相関(Ck+1,Sk+1)のベクトル180はシンボルレートTとサンプリングレートTsが等しい時のベクトル176よりオーバーサンプリングによってπ/2より少ない位相の回転を持つ。
【0195】
ここでオーバーサンプリング率をa(但しaは1より大きい)とすると、サンプリングレートTsはシンボルレートTとの間に次の関係を持つ。
Ts=aT
この時、時刻kTsから次の時刻(k+1)Tsでの間での位相変化量が
(1/a)(π/2) [rad]
となる。
【0196】
従って、図19のベクトル176に対するオーバーサンプリングの際のベクトル180の位相誤差αは次のようになる。
【0197】
【数19】
即ち、シンボルレート1T[sec]では図18のように、時刻kTsから時刻(k+1)Tsの間に位相がπ/2[rad]に変化するのに対し、オーバーサンプリングでは図19のように位相が(π/2−α)[rad]に変化する。このためオーバーサンプリングにおけるベクトル176とベクトル180の関係は次式で与えられる。
【0199】
【数20】
この(21式)を変形すると次のようになる。
【0201】
【数21】
この(22式)において相関Ckを消去すると相関Ck+1は次のようになる。
【0203】
【数22】
この(23式)から明らかなように、時刻kTsと時刻(k+1)Tsでのリファレンスを正弦波とした場合の相関Sk,Sk+1からリファレンスを余弦波とした場合の相関Ck+1を導くことができる。
【0205】
図20は、図19の相関空間に、理想的なシンボルレートのタイミングとなるベクトル182,184,186,188を示し、このシンボルレートのベクトルに対するオーバーサンプリングによるベクトルの関係を示している。ここで、ベクトル182,184,186,188のそれぞれは、ターゲットとなるプリアンブルのレベルRef−c,Ref−sにより表される。
【0206】
オーバーサンプリングによるベクトル180の相関(Ck+1,Sk+1)は次のように表される。
【0207】
【数23】
このため図20において、相関(Ck+1,Sk+1)のベクトル180とターゲットのプリアンブルレベルで与えられる(−Ref−s,Ref−c)のベクトル184となす角度Δτが、理想的なシンボルレートのタイミングに対する位相誤差となり次式で与えられる。
【0209】
【数24】
図12に示した位相オフセット検出器70は、(25)式による演算を実行して位相誤差Δτを位相オフセットとして検出し、ディジタルアキュームレータ65に対するリセットでゼロ位相スタートによるディジタルPLL動作を行わせる。
【0211】
図12の位相オフセット検出器70は、遅延回路136−1,136−3,136−5,136−7からの出力(−1,1,−1,1)を、リファレンス正弦信号とサンプリング信号との積として加算器138に入力してその和を求め、リファレンスを正弦波形とした時の相関Skを出力する。
【0212】
位相オフセット検出器70は次の時刻(k+1)Tsで得られるFIRフィルタ56と遅延回路136−2,136−4,136−6からの出力(1,−1,1,−1)を、リファレンス正弦信号とサンプリング信号の積として加算器140に入力して加算し、相関Sk+1を出力する。
【0213】
加算器138,140に続いて設けられた乗算器142,148、加算器146、レジスタ144,150は、(23)式の演算を実行して時刻(k+1)Tsにおけるリファレンスを余弦信号とした場合の相関Ck+1を求める。
【0214】
演算器154はセレクタ152により時刻(k+1)Tsにおける相関Sk+1と続いて算出された相関Ck+1を逐次選択して入力し、前記(25)式の演算を実行して目標とするシンボルレートに対するオーバーサンプリングされたサンプリング信号の位相誤差Δτを算出して図11のディジタルVCO75に設けているディジタルアキュームレータ65にプリセットする。
【0215】
このように本発明の位相オフセット検出器70にあっては、FIR型の補間フィルタを構成しているカスケード接続した遅延回路136−1〜136−7のタップから加算器138,140を使用して相関Sk,Ckを算出し、これに続く演算器154までの回路により次のシンボルの位相誤差Δτを算出してディジタルVCOのディジタルアキュームレータ65を初期化することにより、ディジタルPLLでの初期位相誤差を0[rad]に近づけ、プリアンブル信号を使用したタイミングリカバリのための位相引き込みを早くすることができる。
【0216】
また本発明にあっては複数サンプルの加算平均によって相関Sk,Sk+1を求めていることでノイズの影響を抑えることができる。またデータの判定結果を必要としないため、位相誤差の検出に誤りが生じにくい。
【0217】
またオーバーサンプリングを行っているディジタルPLLループにあっては、オーバーサンプリングによる補正が加わるため、シンボルレートでの判定時での誤差を最低にできる。
【0218】
更に本発明の位相オフセット検出器70はFIR補間フィルタ64と同じタイミングの使用で位相誤差Δτを算出するため、正確な位相誤差をフィールドバックすることができ、これによってディジタルPLLループの引き込みを早めることができる。
【0219】
一方、上記の実施形態にあってはプリアンブル波形が正弦波あるいは余弦波となる対象波形を扱っているが、プリアンブル波形が非対称となる場合には、上記(9)式の比較法により位相誤差Δθを算出する。
【0220】
具体的には非対称なプリアンブル波形について、例えば図14(A)の正弦波における時刻kTと1つ前の時刻(k−1)Tの2つのサンプル点のように、リファレンスが対称となるようにベクトルの回転を加え、即ち位相をシフトさせ、対称となった連続する2つのサンプルについて、レベル比較法による前記(9)式から位相誤差Δθを算出する。
【0221】
(3.周波数オフセット検出の詳細)
図21は、図10の実施形態におけるタイミングリカバリの際に周波数オフセットを検出して初期設定することによりループ引き込みを行うタイミングリカバリ(タイミング再生ループ)の部分を取り出したブロック図である。
【0222】
図21の部分は、ADコンバータ54、クロック発振器60、バッファ62、FIRフィルタ56、FIR補間フィルタ64、誤差検出器76、ループフィルタ74、ディジタルアキュームレータ65、更にFIR補間フィルタ64から取り出した係数テーブル86を備えている。
【0223】
この内、タイミングリカバリのためのディジタルPLLループは、FIRフィルタ56以降の誤差検出器76、ループフィルタ74、ディジタルアキュームレータ65、係数テーブル86、及びFIR補間フィルタ64を備え、ディジタルVCO75はディジタルアキュームレータ65、係数テーブル86、及びFIR補間フィルタ64で構成されており、その構成及び動作は図11,図12に示した位相誤差の検出とその初期設定によるループ引き込みの実施形態と同じである。
【0224】
このようなディジタルPLLループに対し、周波数オフセットを検出して初期設定するため、周波数オフセット検出器72が設けられている。
【0225】
周波数オフセット検出器72は、セクタ内のプリアンブル区間のリード波形を正弦波に近似した波形として扱い、このリード波形の整数倍長でブロックに分割し、各ブロックごとにリファレンス波形との位相誤差Δωkを求め、この位相誤差Δωkの変化率から周波数オフセットΔfを検出し、検出した周波数オフセットをループフィルタ74にプリセットして、PLL動作を開始する際のループ引き込みを行う。
【0226】
図22は、図21のディジタルPLLループにおける周波数オフセットの検出に基づくループ引き込みのタイムチャートである。図24(A)は磁気ディスク媒体上の記録フォーマットであり、ギャップ190に続いて、1セクタにおけるフォーマット構造を示している。即ち、ギャップ190に続いてプリアンブル192が設けられ、続いてシンクバイト194が設けられ、その後ろにデータ部196が設けられている。
【0227】
このような媒体フォーマットに対し、図24(B)のようにリードゲート信号E1が時刻t1でイネーブルとなってリードが開始され、リードゲート信号E1はデータ部196の後ろのギャップ190−1に入ってディスイネーブルとなる。リードゲート信号E1により磁気ディスクから読み出されたリード信号は、図21のADコンバータ54でクロック発振器60からの固定クロックによりオーバーサンプリングされて、バッファ62に格納される。
【0228】
バッファ62は後の説明で明らかにするように所定段数のシフトレジスタであり、周波数オフセット検出器72において周波数オフセットΔfの検出を行うに必要な周波数検出時間Tfだけリード信号を遅延して出力する。
【0229】
即ち図22(D)のように、所定の周波数検出時間Tfだけ遅延したリードゲート信号E2が時刻t2でイネーブルとなり、この時点からバッファ62により遅延されたリード信号のFIRフィルタ56に対する出力が行われ、FIRフィルタ56は時刻t2からプリアンブル192−1、シンクバイト194−1、データ部196−1を順次入力するようになる。
【0230】
また図22(D)の遅延したリードゲート信号E2の立ち上がりに同期して、図22(E)のループフィルタ初期化制御信号E3が図21のループフィルタ74に対し出力され、このとき時刻t1〜t2の周波数検出時間Tfを通じて、周波数オフセット検出器72において周波数オフセットΔfの検出が行われていることから、この値を使ってループフィルタ74で周波数オフセットのプリセットによるループ引き込みが行われることになる。
【0231】
図23は、図21の周波数オフセット検出器72及びループフィルタ74の詳細を、他の回路ブロックと共に示している。図22において周波数オフセット検出器72は、シフトレジスタ200、相関計算器202,206、正規化部204,208、シフトレジスタ210、ベクトル回転部212、内積演算器214、余弦変換器216及び増幅器218で構成されている。
【0232】
またループフィルタ74は、ループフィルタ・イネーブル信号E4で動作するセレクタ220、比例器222、加算器224、積分器226、加算器228、レジスタ230、初期化制御信号E3により動作するセレクタ232で構成されている。
【0233】
図24は、図23のバッファ62及び周波数オフセット検出器72の具体的な回路構成の実施形態である。
【0234】
図23において、バッファ62は、周波数オフセット検出に使用するサンプル数をnとすると、N段の遅延回路236−1〜236−Nをカスケード接続し、これによって所定の周波数検出時間Tfだけリード信号を遅延して、次段の等化器として機能するFIRフィルタ56に出力する。
【0235】
周波数オフセット検出器72については、図23の周波数オフセット検出器72に示しているシフトレジスタ200とシフトレジスタ210の部分を具体的を示している。即ちシフトレジスタ200は、周波数オフセット検出を行うサンプリング数nに対応してn段の遅延回路238−1〜238−nをカスケード接続している。
【0236】
またシフトレジスタ210にあっては、余弦・正弦・相関計算部240より出力される余弦側の相関及び正弦側の相関のそれぞれに対応して遅延回路242,244を設け、これに続いて遅延回路242−1〜242−n及び244−1〜244−nをカスケード接続している。
【0237】
ここでシフトレジスタ200,210以外については、余弦・正弦・相関計算部240には図23の相関計算機202,206と正規化部204,208が含まれ、またベクトル回転部212はシフトレジスタ210の遅延回路242,244の出力で固定的に決められており、更に内積演算器214以降は、遅延回路246を示すだけで、それ以降は省略している。
【0238】
このような本発明における周波数オフセット検出法を説明すると次のようになる。
【0239】
まずADコンバータ54は、シンボルレートTに対しオーバーサンプリング率aによってa倍のオーバーサンプリングを行っており、このサンプリングレートをTsとする。このため、サンプリングレートTsとシンボルレートTの間には次式の関係がある。
【0240】
Ts=aT
ここでオーバーサンプリング率aがmとnの整数比で表わされるとすると、次のようになる。
【0241】
【数25】
但し、m>n
またプリアンブル区間のリード波形を周期4Tとし、このときnが4の倍数であったとすると、
m=4m0
となり、(26)式は次のようになる。
【0243】
【数26】
このため、プリアンブル区間をn個サンプルするごとに周期4Tの正弦波がm0周期含まれて、同じ位相を繰り返すことになる。
【0245】
これを前提に本発明の周波数オフセット検出にあっては、サンプリングされたプリアンブルを図25のようにnサンプルごとのブロックBkに分割する。もしリード波形の周波数オフセットΔfがΔf=0ならば、ブロックBkには同じ位相の正弦波が含まれる。
【0246】
これに対しリード波形の周波数オフセットΔfがΔf≠0ならば、ブロックBkに含まれる正弦波の位相は周波数オフセットΔfに比例して変化する。この周波数オフセットによるシンボルレートTの変化は、シンボルレート周波数f synで表わすと、周波数オフセットがないときは
【0247】
【数27】
となる。
【0249】
また周波数オフセットΔfがある場合のシンボルレートT'は
【0250】
【数28】
となる。ここで(28)(29)式から、周波数の変動率αは次のように求まる。
【0252】
【数29】
本発明の周波数オフセットの検出法にあっては、図25のように分割した各ブロックごとにリファレンス波形との位相誤差Δωを求め、図26のようにlブロック離れた2つのブロックBkとブロックBk+lの位相誤差の変化率から周波数オフセットを検出する。
【0254】
そこで図26におけるlブロック離れたポイント間の位相誤差Δωは次のようになる。
【0255】
【数30】
このため、(31)式で与えられる位相誤差Δωは、図27のようにブロック間の距離lに比例して大きくなる関係にある。
【0257】
次に図26のように分割した各ブロックにおける平均位相誤差の検出を説明する。図11、図12に示した位相誤差を検出してディジタルアキュームレータ65にプリセットして行うゼロ位相スタートと同様、プリアンブルのリード波形が正弦波となることを利用し、周波数オフセットの検出法においても、相関関数からブロック内の位相誤差平均を求める。
【0258】
ブロック内ではT≒Tsと見なし、周波数オフセットΔfによる位相の変化はないものとする。ここで図28(A)のようにk番目のブロックBkに含まれる信号を
【0259】
【数31】
とおくと、
【0261】
【数32】
となる。
【0263】
そこで、このブロックに含まれる信号Bkと正弦のリファレンス及び余弦のリファレンスとの相関を求める。まず正弦のリファレンス信号Srefと余弦のリファレンス信号Crefは次式で与えられる。
【0264】
【数33】
この正弦のリファレンス信号Srefは、図28(B)の波形となる。また余弦のリファレンス信号Crefは図28(C)の波形となる。
【0266】
更に、正弦のリファレンス信号Srefとk番目のブロックに含まれるプリアンブル信号xk の位相誤差をΔωk とすると、正弦及び余弦のリファレンス信号との相関Csk,Cckは次のようになる。
【0267】
【数34】
ここで正弦リファレンス信号S refとリード信号xkの位相誤差をΔωkとすると、(34)式は次のようになる。
【0269】
【数35】
ここでk番目のブロックに含まれるプリアンブル信号x(t)は、図28(D)の波形となる。したがって、位相誤差Δωkは次式で与えられる。
【0271】
【数36】
次に位相誤差Δωkの変化率をdωとすると、これは次式で与えられる。
【0273】
【数37】
即ち、周波数オフセットΔfはk番目のブロックにおける位相誤差Δωkの変化率dωに比例する。言い換えれば、一定区間離れたブロックの位相誤差Δωkの差から次式のようにして周波数オフセットΔfを求めることができる。
【0275】
【数38】
この(38)式に(36)式の位相誤差Δωkを代入すると次式のようになる。
【0277】
【数39】
このような関係を図29の相関空間の基準円のベクトルで表わすと次のようになる。まず図29におけるベクトルVk,V(k+l)を次のように置く。
【0279】
【数40】
ここでΔωkの変化率ωdを
【0281】
【数41】
と置くと、変化率dωはベクトルVkとベクトルV(k+l)の内積となる。即ち次式で与えられる。
【0283】
【数42】
但し、Vk’=(−Cck,Csk)
そしてVk,V(k+l)の内積として与えられる変化率dωは比較的小さいことから、次式で近似できる。
【0285】
【数43】
したがって、周波数オフセットΔfは次式で与えられる。
【0287】
【数44】
図23に示した周波数オフセット検出器72の回路は、(46)式に従った演算を順次行って周波数オフセットΔfを出力する。
【0289】
ここでプリアンブル内の各ブロックの位相誤差Δωkは、周波数オフセットΔfに比例して増加又は減少する。いま図30のように、プリアンブル内にN個のブロックが含まれているとすると、
{ Δωk } 但し、0≦k<N
から最小2乗法による図31の回帰直線y=ax+bを求めれば、傾きaが周波数オフセットΔfに相当する。
【0290】
図21のディジタルPLLを用いたタイミングリカバリのループでシンボルレートの周波数fを制御するのは、ループフィルタ74の出力値Oep(t)である。このループフィルタ74の出力値Oep(t)とシンボルレートの周波数fとの間には次の関係がある。
【0291】
【数45】
したがって、ループフィルタ74の初期値が(Δf/Kv)であれば、ループ動作開始時の周波数オフセットを補償することができる。具体的に、ループフィルタ74は図23に示したように、1次のローパスフィルタで構成されていることから、ループフィルタ74の積分器226の出力がΔf/(Kv)となるように初期化すればよい。
【0293】
即ち、周波数オフセット検出器72で検出された周波数オフセットΔfを増幅器218で(1/Kv)倍して、ループフィルタ74のセレクタ232の一方に(Δf/Kv)として入力し、図22の(E)の時刻t2のタイミングで得られる初期化制御信号E3によるセレクタ232の動作で(Δf/Kv)を選択してレジスタ230に読み込み、加算器228より出力される積分器226の初期出力としてレジスタ230の(Δf/Kv)を選択して加算器224に入力し、ループフィルタ74の初期出力として次段のディジタルアキュームレータ65に入力する。
【0294】
なお、ループフィルタ74のセレクタ220は、ループフィルタ・イネーブル信号E4が得られていないときには固定値0を選択しており、ループフィルタ・イネーブル信号E4が得られると誤差検出器76の出力を選択して入力するようになる。
【0295】
このように本発明はプリアンブル区間で予め周波数オフセットが検出できるため、検出された周波数オフセットによりループフィルタ74を初期化することで、周波数オフセットをゼロとした状態でプリアンブル信号を入力してディジタルPLLによるループ引き込みを行うことができ、これによって定常位相誤差及び引き込み時間を改善できると共に、更に周波数オフセットの引き込みレンジを広げることができる。
【0296】
(4.オーバーサンプリング等化器のトレーニング)
図32は、図10の実施形態におけるオーバーサンプリング等化器のトレーニングに関連する回路部を取り出している。この回路部は、ADコンバータ54、クロック発振器60、オーバーサンプリング等化器として機能するFIRフィルタ56、FIR補間フィルタ64、誤差検出器76、係数テーブル86、遅延回路248、トレーニング回路116、更に係数更新回路250で構成される。
【0297】
FIRフィルタ56はオーバーサンプリング等化器として機能し、シンボルレートに対しADコンバータ54でオーバーサンプリングしたサンプリング信号について波形等化を行い、FIR補間フィルタ64によってシンボルレートにダウンサンプリングして、図10のビタビ判定器66に出力している。
【0298】
このFIRフィルタ56を用いたオーバーサンプリング等化器の係数をトレーニングするため、トレーニング回路116が設けられている。トレーニング回路116には、誤差検出器76からFIR補間フィルタ64のシンボルレート出力と、図10に示したビタビ判定器66からのシンボル判定出力との判定誤差eを入力する。
【0299】
トレーニング回路116は、誤差判定器76から入力したシンボルレートの判定誤差eをFIRフィルタ56にフィードバックするときに、オーバーサンプリング信号への逆補間を行う。この逆補間は、後の説明で明らかにするように、トレーニング回路116に設けているディジタル信号処理回路でシンボルレートからサンプリングレートへの等化誤差の補間処理を行う。
【0300】
このシンボルレートからサンプリングレートへの等化誤差を補間処理する際に、従属型FIRフィルタはタイミング再生ループで選択されたFIR補間フィルタ64からのタップ係数を、遅延回路248を介して入力して使用する。
【0301】
図33は、図32のFIR補間フィルタ64とトレーニング回路116の具体例を示した回路図である。図33において、FIR補間フィルタ64は基本的に図12のゼロ位相スタートについて説明したFIR補間フィルタと同じであるが、図12が8タップ構成であるのに対し、この実施形態にあっては10タップ構成としている。
【0302】
即ちFIR補間フィルタ64は、遅延回路130−1〜130−9をカスケード接続し、それぞれのタップ側に乗算器132−1〜132−10を設け、図32の係数テーブル86からの位相誤差μに応じたタップ係数を受けて各タップ出力と乗算し、最終的に加算器134で加算し、遅延回路252を介して誤差検出器76にシンボルレートにダウンサンプリングした等化信号yを出力している。
【0303】
トレーニング回路116は従属型のFIRフィルタで構成されている。この従属型のFIRフィルタは、誤差検出器76からのシンボルレートの判定誤差eを乗算器256−1〜256−10に入力し、図32の係数テーブル86よりFIR補間フィルタ64に与えられるタップ係数を、遅延回路248を介して入力して乗算している。
【0304】
乗算器256−1〜256−10の出力は、遅延回路254−1〜254−10と加算器258−1〜258−9を交互にカスケード接続した回路の各加算器258−1〜258−9で加算され、これによってシンボルレートの判定誤差eをサンプリングレートに逆補間して、図32の係数更新回路250に出力している。
【0305】
図34は、図32のオーバーサンプリング等化器として機能するFIRフィルタ56と、これに対応して設けている係数更新回路250の一部の具体的な回路構成であり、これに続く係数更新回路250の残り部分は図35に示している。
【0306】
図34において、オーバーサンプリング等化器として機能するFIRフィルタ56は、遅延回路260−1〜260−10をカスケード接続し、そのタップ出力を乗算器262−1〜262−10に入力して、図35の係数更新回路250から与えられるタップ係数C−5〜C4と乗算した後、加算器263で加算し、遅延回路264を介してオーバーサンプリングしたサンプリング信号の波形等化を行って、次段のFIR補間フィルタ64に出力する。
【0307】
このFIRフィルタ56に対し設けられている係数更新回路250の部分は、プリアンブル区間における係数の調整を行わないようにするプリアンブル拘束条件を作り出している。プリアンブル拘束条件を設定する回路部は、FIRフィルタ56の10個のタップ出力を遅延する遅延回路266−1〜266−10に続いて、並列的に内積器268,270、遅延回路271,272及びスカラ積演算部274,276を設け、スカラ積演算部274,276の出力及びFIRフィルタ56の順タップ出力をベクトル加算器278で加算し、eビットの10個の出力を出している。
【0308】
内積器268及びスカラ積演算器274にはレジスタ296から余弦のレファレンス信号Ref−cが与えられている。また内積器270及びスカラ積演算器276には、レジスタ297から正弦のレファレンス信号Ref−sが与えられている。
【0309】
この図34のベクトル加算器278に続いて、図35のbビットの10出力分の遅延回路280−1〜280−10が設けられ、その出力を乗算器284の一方に入力している。乗算器284の他方の入力には乗算器282の出力が与えられる。
【0310】
乗算器282には、図33のトレーニング回路116に設けている従属型FIRフィルタの出力、即ちシンボルレートからサンプリングレートにアップサンプリングされた判定誤差eが入力し、位相誤差μをゲインとして乗算した信号を出力している。
【0311】
乗算器284に続いてはbビットの10出力分の遅延回路286−1〜286−10が設けられ、ベクトル加算器288と遅延回路290−1〜290−10を備えたLMSループ292に入力している。LMSループ292は、判定誤差が最小となるように、オーバーサンプリング等化器として機能するFIRフィルタ56に対するタップ係数C−5〜C4の調整を行い、遅延回路294−1〜294−10を介してFIRフィルタ56側に出力する。
【0312】
図36は、図34のタップ係数更新回路250側に設けている内積器268の具体例であり、入力側の遅延回路266−1〜266−10を併せて示している。この内積器268は従来の遅延回路266−1〜266−10の各タップ出力を遅延回路295で並列的に遅延した後、レジスタ296により設定されている余弦のリファレンスRef−nの値であるRef0〜Ref9を乗算器298−1〜298−10で乗算した後、加算器300で加算して内積を求めている。
【0313】
この内積器268の構成は、並列的に設けている他の内積器270についても同様であり、内積器270にあっては、レジスタ297により設定するリファレンスが正弦となる点で相違しているだけである。
【0314】
次に図32〜図36の構成を持つオーバーサンプリング等化器のトレーニングの詳細を説明する。
【0315】
図32のようなオーバーサンプリング信号補間型のタイミング再生ループでは、信号処理は全てサンプルレートTsのサンプリング周期で行う。このサンプルレートTsはシンボルレートTより短い周期である。一方、信号判定はシンボルレートTで行う。
【0316】
誤差検出器76からの判定誤差e(t)は、FIRフィルタ56による等化及びFIR補間フィルタ64による信号補間後の等化信号y∧(t)とターゲット応答の理想判定値の差である。そして、タイミング再生ループ、AGCループ、及びオーバーサンプリング等化器の適応等化は、判定誤差e(t)が最小となるように制御する。
【0317】
ここで判定誤差e(t)は次式で与えられる。
【0318】
【数46】
判定誤差e(t)はシンボルレートでサンプリングされた信号のため、オーバーサンプリングされた適応等化器に直接フィードバックして、LMS法(最小2乗法)での係数トレーニングは行うことができない。
【0320】
図37は、従来の一般的な適応等化器のトレーニングループである。即ち、ADコンバータ301でサンプリングされた信号I(t)は等化器302で波形等化され、等化信号y(t)を判定器304に入力し、信号を判定する。判定器304の判定値y∧は、誤差検出器306に与えられて、(48)式で与えられる判定誤差e(t)が求められ、この判定誤差e(t)が最小となるように、LMS係数トレーニング回路308が等化器302の係数を制御する。このような従来のLMS法の係数トレーニングにあっては、次式に従ったトレーニングを行う。
【0321】
【数47】
しかし、図37のような従来のLMS法での係数トレーニングは、全てシンボルレートのサンプリング周期を持つ信号の場合に実現できるが、本発明が対象としているオーバーサンプリング信号補間型のタイミング再生ループでは直接判定誤差e(t)を等化器302にフィードバックするトレーニングはできない。
【0323】
そこで本発明にあっては、図32に示したようにトレーニング回路116で誤差検出器76からの判定誤差e(t)をシンボルレートからサンプリングレートへ逆補間するようにしている。
【0324】
図38は、オーバーサンプリング信号補間型のタイミング再生ループを持つ磁気記録再生装置のチャネル及びリード系を示している。即ちチャネル(伝送路)310は、ライトヘッド312、媒体314、リードヘッド316、アンプ318、可変利得アンプ50、CTフィルタ52、ADコンバータ54、適応等化器として機能するFIRフィルタ56、サンプリングレートからシンボルレートにダウンサンプリングするFIR補間フィルタ64、ビタビ判定器66及びタイミング再生用PLL320を備える。この内、適応等化器としてのFIRフィルタ56からビタビ判定器66までの部分がリード信号処理系322となる。
【0325】
図39は、図38のチャネル310に対するリードチャネル側を取り出して、各部の信号とそのレートを示している。チャネル310にはシンボルレートTの信号xkが入力し、リード信号x(t)として加算器324でノイズNが重畳され、アンプ318で増幅された後、加算器326で直流オフセットIofが加わり、その後にADコンバータ54でサンプリングされてサンプリング信号Iとなる。
【0326】
続いて、オーバーサンプリング等化器としてのFIRフィルタ56で波形等化を受けて等化信号Zとなり、続いてFIR補間フィルタ64でサンプリングレートTsからシンボルレートTへのダウンサンプリングの補間を受けて等化信号yとなってビタビ判定器66に与えられ、ビタビ判定器66より判定信号y∧が得られる。
【0327】
このようなオーバーサンプリング型の信号補間のタイミング再生系において、ADコンバータ54からFIR補間フィルタ64までがオーバーサンプリングされたサンプリングレートTsの信号を扱っており、それ以外の部分はシンボルレートTの信号を扱っている。
【0328】
そこで、図39のようなオーバーサンプリング型の信号補間のタイミング再生ループにおける各信号を次のように定義する。まずチャネル310から得られるリード信号x(t)は次のようになる。
【0329】
【数48】
また、ADコンバータ54でオーバーサンプリングされる信号即ちAD変換後のサンプリング信号Iは、次のようになる。
【0331】
【数49】
続いて、オーバーサンプリング等化器として機能するFIRフィルタ56の係数であるタップ長とフィルタ係数を次のようにする。即ち、タップ長は
【0333】
【数50】
であり、またフィルタ係数は
【0335】
【数51】
となる。このため、FIRフィルタ56の等化器出力Zは次のようになる。
【0337】
【数52】
続いて、位相オフセット量μに応じたシフトを行うFIR補間フィルタ64の係数として、タップ長を
【0339】
【数53】
とし、フィルタ係数を
【0341】
【数54】
とする。
【0343】
このため、FIR補間フィルタ64の出力は次のようになる。
【0344】
【数55】
次にオーバーサンプリング等化器として機能するFIRフィルタ56の係数トレーニング法を説明する。まず図40に示すように、FIRフィルタ56について等化の目標となるターゲット特性(PR方式の伝達関数)をg(T)とする。この場合、図40のFIRフィルタ56による理想等化信号は次のようになる。
【0346】
【数56】
次にオーバーサンプリング等化器としてのFIRフィルタ56の拘束条件を説明する。通常、等化器の係数トレーニングは、入力信号{x,k}がランダムパターンで互いの情報が無相関であることが前提となっている。このため、周期パターンのプリアンブル区間でトレーニングを行うと係数が最適化されない。このためプリアンブル信号の区間については、トレーニングによって係数の値が変化しないようにする拘束条件を加えなければならない。
【0348】
まず、FIRフィルタ56における等化器出力をタップ長とフィルタ係数を用いて表わすと次のようになる。
【0349】
【数57】
ここで等化器の周波数特性は
【0351】
【数58】
で表わされる。プリアンブルパターンは
【0353】
【数59】
の正弦波となるため、周波数特性は次のようになる。
【0355】
【数60】
したがってFIRフィルタ56にあっては、プリアンブル信号によるトレーニングによって係数値が変化しない拘束条件として(59)式及び(61)式の拘束条件を満たせばよい。ここで
【0357】
【数61】
とすると、拘束条件は次のようになる。
【0359】
【数62】
等化器の係数は、等化器出力y(t)と理想出力y(t)の2乗誤差平均が最小となるようにトレーニングを行う。このための2乗誤差は次のようになる。
【0361】
【数63】
このような(63)式の拘束条件及び(64)式の2乗誤差は、係数{feq(i)}を変数とする多変数関数であり、次のようになる。但し、Cは定数である。
【0363】
【数64】
この(65)式におけるZの最小値を求めるため、ラグランジェの未定数乗数法を用いる。即ち、2乗誤差Zの極値をとる係数を
【0365】
【数65】
とすると、拘束条件及び2乗誤差は次式を満たす。
【0367】
【数66】
この(67)式について、(64)式の2乗誤差mse及び(54)式の等化器出力を用いて展開すると、次のようになる。
【0369】
【数67】
(68)式において、fμ(j)はサンプリングレートTsのフィルタ係数であることから、第1項の中の
【0371】
【数68】
で変数変換を行う。
【0373】
このときフィルタ係数fμ(j)は時刻lTs、そのときの周波数オフセットがμとなるFIR補間フィルタ64のj番目の係数である。このことを明示するために
【0374】
【数69】
とおく。
【0376】
また判定誤差は次式で近似できる。
【0377】
【数70】
そこで(68)式の変数変換の結果は次のようになる。
【0379】
【数71】
この(71)式において、右辺第1項は平均値であることから、iとjは無相関で互いに依存することがなく、時間シフトが可能である。したがって(71)式を時間シフトすると次のようになる。
【0381】
【数72】
ここで判定誤差は
【0383】
【数73】
で与えられることから、(72)式は次のようになる。
【0385】
【数74】
この(74)式の
【0387】
【数75】
は、係数feq(i)が拘束条件によって
【0389】
【数76】
と平行な平面上に制限されることを意味している。
【0391】
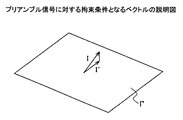
図41は、(74)式による拘束条件を説明している。今、ベクトルIを
【0392】
【数77】
とおき、ベクトルI'を平面Γに射影されたベクトルとすると、次式で与えられる。
【0394】
【数78】
このことは、
【0396】
【数79】
となることであり、2乗誤差が0となる条件であることを示している。したがって、プリアンブル信号をトレーニング系にフィードバックしていても、プリアンブル(Ref−C,Ref−S)の拘束条件により、プリアンブル信号では
等化器の係数トレーニングは行われない。従って、常時リード中はLMSを適用することができる。
【0398】
即ち、FIRフィルタ56の係数を
【0399】
【数80】
とすると、LMSの漸化式が次のようになる。
【0401】
【数81】
図32〜図36に示したトレーニング回路116及びFIRフィルタ56の係数更新回路250は、この(80)式に従ったLMS法により係数トレーニングを行うことになる。
【0403】
即ち、本発明のオーバーサンプリング等化器として機能するFIRフィルタ56について、シンボルレートでの判定誤差を補間してサンプリングレートとし、またプリアンブル信号について拘束条件を設定することで、プリアンブル信号によるトレーニングで係数値が変化せず、オーバーサンプリング等化器のトレーニングに従来のLMS法を採用することができ、確実に判定誤差の2乗平均が0となるようにオーバーサンプリング等化器の係数をトレーニングすることができる。
【0404】
(5.直流オフセットキャンセル制御と自動利得制御)
図10の実施形態にあっては、直流オフセット除去ループフィルタ118、DAコンバータ120及びアナログ加算器122によって、直流オフセットキャンセル制御ループを構成している。またAGCループフィルタ124、DAコンバータ126によって、自動利得制御ループを構成している。
【0405】
このため、リード時のADコンバータ54に対する自動利得制御による入力信号振幅及び直流オフセットキャンセルについても、FIRフィルタ56を対象とした等化器トレーニングと同様、2乗誤差を0とするように制御する。
【0406】
まず直流オフセットのキャンセルは、図10の直流オフセット除去ループフィルタ118により、誤差検出器76からの判定誤差eの平均とFIRフィルタの等化器係数の総和との積が0となるように制御する。即ち、前記(64)式で与えられる2乗誤差Zが0となる条件は、次式で与えられる。
【0407】
【数82】
次に、図10のAGCループフィルタ124によりADコンバータ54に対する入力信号振幅を自動利得制御する際の2乗誤差を0とする制御は、FIRフィルタ56の出力yと誤差検出器76からの判定誤差eの積の平均が0となるように制御することである。この関係は次式で与えられる。
【0409】
【数83】
なお上記の実施形態にあっては、セクタデータ先頭のプリアンブル領域から位相オフセットと周波数オフセットを検出して補正状態を初期設定した後にバッファからデータを読み出しながらプリアンブル領域での位相引き込み及び周波数引き込みを行っているが、プリアンブル領域から周波数オフセットのみを検出して補正状態を初期設定した後にバッファからデータを読み出しながらプリアンブル領域での位相引き込み及び周波数引き込みを行うようにしてもよい。
【0411】
また上記の実施形態はデータの復号としてビタビ判定器を例にとるものであったが、本発明はこれに限定されず、ビタビ判定器に代わる新たな符号化復号法として提案されている反復型符号、即ち低密度パリティ検査符号法やターボ符号化復号化法であってもよい。
【0412】
また本発明は、その目的と利点を損なうことのない適宜の変形を含み、更に上記の実施形態に示した数値による限定は受けない。
【0413】
更にまた、上記の実施形態は、磁気ディスクの記録再生を例にとるものであったが、これ以外のMO、光ディスク、磁気テープなどの情報記録再生についても同様に適用することができる。
【0414】
(付記)
(付記1)
情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、
再生データの先頭領域から位相誤差及び周波数誤差を検出して初期補正するタイミングリカバリ部を備えたことを特徴とする情報記録再生装置。(1)
【0415】
(付記2)
情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、
再生データの先頭領域から周波数誤差を検出して初期補正するタイミングリカバリ部を備えたことを特徴とする情報記録再生装置。(2)
【0416】
(付記3)
情報を磁気記録媒体上に記録して再生する信号復号回路に於いて、
再生データの先頭領域から位相誤差及び周波数誤差を検出して初期補正するタイミングリカバリ部を備えたことを特徴とする信号復号回路(3)。
【0417】
(付記4)
情報を磁気記録媒体上に記録して再生する信号復号回路に於いて、再生データの先頭領域から周波数誤差を検出して初期補正するタイミングリカバリ部を備えたことを特徴とする信号復号回路。(4)
【0418】
(付記5)
情報を磁気記録媒体上に記録して再生する情報記録再生方法に於いて、
再生データの先頭領域から位相誤差及び周波数誤差を検出し、
検出した前記位相誤差及び周波数誤差をなくすように再生データを初期補正することを特徴とする情報記録再生方法。
【0419】
(付記6)
情報を磁気記録媒体上に記録して再生する情報記録再生方法に於いて、
再生データの先頭領域から周波数誤差を検出し、
検出された前記周波数誤差をなくすように再生データを初期補正することを特徴とする情報記録再生方法。
【0420】
(付記7)
情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、
固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、
セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、前記周期波形のリファレンス波形とサンプル波形の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、検出した前記位相誤差により前記タイミングリカバリ部を補正してループ動作を開始させる位相オフセット検出器と、
を備えたことを特徴とする情報記録再生装置。(5)
【0421】
(付記8)
付記7記載の情報記録再生装置に於いて、前記タイミングリカバリ部は、
前記補間フィルタから出力されたシンボルレートのサンプリング信号と判定器からのシンボル判定信号との位相誤差を検出する誤差検出器と、
前記誤差検出器からの位相誤差を積分するループフィルタと、
前記ループフィルタの出力を積分して位相誤差をなくすように前記補間フィルタの係数を制御するアキュームレータと、
を備え、前記位相オフセット検出器で検出した前記位相誤差により前記アキュームレータを初期化してゼロ位相スタートを行わせることを特徴とする情報記録再生装置。(6)
【0422】
(付記9)
情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、
固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、
セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、前記周期波形のリファレンス信号とシンボルレートに対しオーバーサンプリングしたサンプリング信号の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、検出した位相誤差により前記タイミングリカバリ部を補正して動作を開始させる位相オフセット検出器と、
を備えたことを特徴とする情報記録再生装置。(7)
【0423】
(付記10)
情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、
固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、
プリアンブル区間を正弦波に近似したリード波形の整数倍長で複数のブロックに分割し、各ブロック毎にサンプリング波形とリファレス波形との位相誤差を求め、所定ブロック数に亘る前記位相誤差の変化率から周波数誤差を検出し、検出した周波数誤差により前記タイミングリカバリ部を補正してループ動作を開始させる周波数オフセット検出器と、
を備えたことを特徴とする情報記録再生装置(8)
【0424】
(付記11)
付記10記載の情報記録再生装置に於いて、前記タイミングリカバリ部は、
前記補間フィルタから出力されたシンボルレートのサンプリング信号と判定器からのシンボル判定信号との位相誤差を検出する誤差検出器と、
前記誤差検出器からの位相誤差を積分するループフィルタと、
前記ループフィルタの出力を積分して位相誤差をなくすように前記補間フィルタの係数を制御するアキュームレータと、
を備え、前記周波数オフセット検出器で予測した前記周波数誤差により前記ループフィルタを初期化してループ動作を開始させることを特徴とする情報記録再生装置。(9)
【0425】
(付記12)
情報を磁気記録媒体上に記録して再生する情報記録再生装置に於いて、
シンボルレートのリード信号を入力して非同期にオーバーサンプリングしたサンプリング信号を出力するADコンバータと、
前記オーバーサンプリングされたサンプリング信号を波形等化するオーバーサンプリング等化器と、
前記等化信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、
前記補間フィルタの出力信号と判定器の判定信号から求めたシンボルレートの判定誤差を前記オーバーサンプリング等化器のトレーニングにフィードバックする時に、前記判定誤差をサンプリングレートの信号に逆補間するトレーニング回路と、
を備えたことを特徴とする情報記録再生装置。(10)
【0426】
(付記13)
情報を磁気記録媒体上に記録して再生する信号復号回路に於いて、
固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、
セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、前記周期波形のリファレンス波形とサンプル波形の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、検出した前記位相誤差により前記タイミングリカバリ部を補正してループ動作を開始させる位相オフセット検出器と、
を備えたことを特徴とする信号復号回路。
【0427】
(付記14)
情報を磁気記録媒体上に記録して再生する信号復号回路に於いて、
固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、
セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、前記周期波形のリファレンス信号とシンボルレートに対しオーバーサンプリングしたサンプリング信号の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、検出した位相誤差により前記タイミングリカバリ部を補正して動作を開始させる位相オフセット検出器と、
を備えたことを特徴とする信号復号回路。
【0428】
(付記15)
情報を磁気記録媒体上に記録して再生する信号復号回路に於いて、
固定クロックによりオーバーサンプリングされた信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、
プリアンブル区間を正弦波に近似したリード波形の整数倍長で複数のブロックに分割し、各ブロック毎にサンプリング波形とリファレス波形との位相誤差を求め、所定ブロック数に亘る前記位相誤差の変化率から周波数誤差を検出し、検出した周波数誤差により前記タイミングリカバリ部を補正してループ動作を開始させる周波数オフセット検出器と、
を備えたことを特徴とする信号復号回路。
【0429】
(付記16)
情報を磁気記録媒体上に記録して再生する信号復号回路に於いて、
シンボルレートのリード信号を入力して非同期にオーバーサンプリングしたサンプリング信号を出力するADコンバータと、
前記オーバーサンプリングされたサンプリング信号を波形等化するオーバーサンプリング等化器と、
前記等化信号を補間してシンボルレートにダウンサンプリングする補間フィルタを備えたタイミングリカバリ部と、
前記補間フィルタの出力信号と判定器の判定信号から求めたシンボルレートの判定誤差を前記オーバーサンプリング等化器のトレーニングにフィードバックする時に、前記判定誤差をサンプリングレートの信号に逆補間するトレーニング回路と、
を備えたことを特徴とする信号復号回路。
【0430】
(付記17)
情報を磁気記録媒体上に記録して再生し、再生されたリード信号を固定クロックによりオーバーサンプリングして等化した後に補間してシンボルレートにダウンサンプリングして判定するタイミングリカバリ部を備えた情報記録再生方法に於いて、
セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、前記周期波形のリファレンス波形とサンプル波形の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、
検出した前記位相誤差によりタイミングリカバリ部を補正してループ動作を開始させることを特徴とする情報記録再生方法。
【0431】
(付記18)
情報を磁気記録媒体上に記録して再生し、再生されたリード信号を固定クロックによりオーバーサンプリングして等化した後に補間してシンボルレートにダウンサンプリングして判定するタイミングリカバリ部を備えた情報記録再生方法に於いて、
セクタ内のプリアンブル区間におけるリード波形を周期波形として扱い、前記周期波形のリファレンス信号とシンボルレートに対しオーバーサンプリングしたサンプリング信号の相関から信号ポイントとサンプリングポイントとの位相誤差を検出し、
検出した位相誤差により前記タイミングリカバリ部を補正して動作を開始させることを特徴とする情報記録再生方法。
【0432】
(付記19)
情報を磁気記録媒体上に記録して再生し、再生されたリード信号を固定クロックによりオーバーサンプリングして等化した後に補間してシンボルレートにダウンサンプリングして判定するタイミングリカバリ部を備えた情報記録再生方法に於いて、
プリアンブル区間を正弦波に近似したリード波形の整数倍長で複数のブロックに分割し、
各ブロック毎にサンプリング波形とリファレス波形との位相誤差を求め、
所定ブロック数に亘る前記位相誤差の変化率から周波数誤差量を検出し、
検出した前記周波数誤差により前記タイミングリカバリ部を補正してループ動作を開始させることを特徴とする情報記録再生方法。
【0433】
(付記20)
情報を磁気記録媒体上に記録して再生し、再生されたリード信号を固定クロックによりオーバーサンプリングして等化器で等化した後に補間フィルタで補間してシンボルレートにダウンサンプリングして判定する情報記録再装置の等化器トレーニング方法に於いて、
前記補間された信号と判定信号から求めたシンボルレートの判定誤差を前記等化器のトレーニングにフィードバックする時に、前記判定誤差をサンプリングレートの信号に逆補間することを特徴とする等化器トレーニング方法。
【0434】
【発明の効果】
以上説明してきたように本発明によれば、再生データの先頭となるプリアンブル領域における誤差検出による補償を、位相に対してのみではなく周波数についても誤差を検出して補償することで、位相引き込み及び周波数引き込みを短時間で行ってプリアンブル領域を短くできると共に、引き込むことのできる周波数の誤差範囲を広くすることができ、この結果、磁気記録の高密度化と記録再生における信頼性を大幅に向上することができる。
【0435】
本発明の位相オフセットの検出によれば、複数サンプルの加算平均で相関を求めることで、位相オフセットを検出する際にノイズ影響を抑えることができる。また判定結果が不要のため、位相誤差の誤りが生じにくい。
【0436】
本発明の位相オフセットの検出によれば、オーバーサンプリングされたサンプリングレートで動作する補間フィルタと同タイミングの信号で位相誤差を算出するため、正確な位相誤差をフィードバックすることができ、ループの引き込みが早くなる。
【0437】
本発明は、プリアンブル区間で、予め周波数オフセットを検出し、この値でループフィルタを初期化することで、周波数オフセットの引き込み量がゼロ状態でループを引き込むことができ、定常位相誤差及び引き込み時間を改善できる。さらに、周波数オフセットの引き込み可能レンジを広げることもできる。
【0438】
本発明は、シンボルレートでの判定誤差を逆補間してサンプリングレートとすることで、オーバーサンプリング等化器のトレーニングに従来のLMS法を採用でき、判定誤差の自乗平均がゼロになるようにオーバーサンプリング等化器の係数をトレーニングすることができる。
【図面の簡単な説明】
【図1】本発明の原理説明図
【図2】本発明が適用されるハードディスクドライブのブロック図
【図3】本発明のタイミングリカバリ部を備えたデータ再生部のブロック図
【図4】図3の位相オフセット検出器および周波数オフセット検出器のブロック図
【図5】図3のFIR補間フィルタのブロック図
【図6】本発明によるタイミングリカバリ動作のタイムチャート
【図7】位相オフセットと周波数オフセットをもつプリアンブル再生データの説明図
【図8】本発明のタイミングリカバリ部を備えたデータ再生部の実施形態のブロック図
【図9】クロック同期となる本発明のタイミングリカバリ部を備えたデータ再生部の実施形態のブロック図
【図10】本発明によるタイミングリカバリの他の実施形態のブロック図
【図11】図10のゼロ位相スタートのディジタルPLLループの部分を取出したブロック図
【図12】図11のFIR補間フィルタと位相オフセット検出器の具体的な実施例の回路ブロック図
【図13】FIR補間フィルタによるリ・サンプリング動作とゼロ位相スタートのための位相のずれを示した説明図
【図14】プリアンブル区間の位相比較により位相オフセットを求める方法における位相誤差なしと位相誤差のあるプリアンブル波形の説明図
【図15】リファレンスを正弦信号とした場合の時刻kTsでの相関の算出方法の説明図
【図16】次の時刻(k+1)Tsでのリファレンスを正弦信号とした相関の算出方法の説明図
【図17】リファレンスとする余弦信号を正弦信号およびサンプリング信号と合わせて示した波形説明図
【図18】シンボルレートとサンプリングレートが等しいときのC−S相関空間の基準円に対するプリアンブル信号の相関ベクトルの説明図
【図19】シンボルレートに対しオーバーサンプリングしたときのC−S相関空間の基準円に対するプリアンブル信号の相関ベクトルの説明図
【図20】図19についてターゲットとなる理想的なシンボルレートの相関のベクトルに対するオーバーサンプリングした場合の相関ベクトルの位相誤差を示した説明図
【図21】図10の周波数オフセット検出によるループ引き込みのディジタルPLLループの部分を取出したブロック図
【図22】周波数オフセット検出によるループ引き込みのタイムチャート
【図23】図21における周波数オフセット検出器及びループフィルタの回路構成のブロック図
【図24】図22におけるバッファ及び周波数オフセット検出器におけるレジスタ詳細を示した回路ブロック図
【図25】周波数オフセット検出で行うプリアンブル区間のブロック分割の説明図
【図26】離れたブロックのポイント間での位相差の説明図
【図27】ブロック間距離に対する位相差の関係グラフ図
【図28】プリアンブル区間のブロックBkにおける正弦波リファレンス、余弦波リファレンス及びリード波形の説明図
【図29】C−S相関空間の基準円上において離れたブロックのベクトルの内角で表現される位相誤差の変化率dωの説明図
【図30】N個のブロックを含むプリアンブルの説明図
【図31】最小2乗法による回帰直線の説明図
【図32】図10のオーバーサンプリングの信号補間型ループの等化器トレーニング部分を取出したブロック図
【図33】図32のFIR補間フィルタとトレーニング回路の具体的実施形態の回路図
【図34】図32のFIRフィルタと係数更新回路の具体的実施形態の回路図
【図35】図34に続く係数更新回路の回路図
【図36】図34の係数更新回路に設けた内積器の具体的実施形態の回路図
【図37】従来のLMS法によるトレーニングを行う再生タイミングループのブロック図
【図38】オーバーサンプル型の信号補間によるタイミング再生ループを持つ本発明のトレーニング対象となるリード系のブロック図
【図39】図38のタイミング再生ループを取出して各部の信号とレートを示した説明図
【図40】本発明の係数トレーニングを行う等化器のターゲット特性の説明図
【図41】プリアンブル信号に対する拘束条件となるベクトルの説明図
【図42】クロック同期となる従来のタイミングリカバリ部を備えたデータ再生部のブロック図
【図43】図42の従来例におけるタイミングリカバリ動作のタイムチャート
【図44】クロック非同期となる従来のタイミングリカバリ部を備えたデータ再生部のブロック図
Claims (2)
- 固定クロックによりサンプリングされたリード信号を、ループフィルタおよびディジタルアキュームレータで制御された補間フィルタで再サンプリングするタイミングリカバリを備えた信号復号回路において、
プリアンブル区間を複数のブロックに分割し、ブロック毎にリード波形とリファレンス波形との位相誤差を求め、所定ブロック数に亘る前記位相誤差の変化率から周波数誤差を検出する周波数誤差検出器と、
リード波形を一定時間遅延させるバッファメモリとを有し、
前記位相誤差をディジタルアキュームレータにプリセットし、前記周波数誤差をループフィルタにプリセットした上で、前記バッファメモリにより遅延されたリード信号に対して前記補間フィルタ出力信号で再サンプリングすることを特徴とする信号復号回路。 - ヘッド、情報記録媒体、及び請求項1項記載の信号復号回路を有する情報記録再生装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002095505A JP4109003B2 (ja) | 2002-01-21 | 2002-03-29 | 情報記録再生装置、信号復号回路及び方法 |
| US10/273,485 US7054088B2 (en) | 2002-01-21 | 2002-10-18 | Information recording and reproducing apparatus and method, and signal decoding circuit for performing timing recovery |
| US11/388,377 US7515369B2 (en) | 2002-01-21 | 2006-03-24 | Information recording and reproducing apparatus and method, and signal decoding circuit for performing timing recovery |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002-11018 | 2002-01-21 | ||
| JP2002011018 | 2002-01-21 | ||
| JP2002095505A JP4109003B2 (ja) | 2002-01-21 | 2002-03-29 | 情報記録再生装置、信号復号回路及び方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003281831A JP2003281831A (ja) | 2003-10-03 |
| JP2003281831A5 JP2003281831A5 (ja) | 2005-09-08 |
| JP4109003B2 true JP4109003B2 (ja) | 2008-06-25 |
Family
ID=26625571
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002095505A Expired - Fee Related JP4109003B2 (ja) | 2002-01-21 | 2002-03-29 | 情報記録再生装置、信号復号回路及び方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7054088B2 (ja) |
| JP (1) | JP4109003B2 (ja) |
Families Citing this family (124)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6947243B2 (en) * | 2002-05-24 | 2005-09-20 | Hitachi Global Storage Technologies Netherlands B.V. | Method and system for time-shift based rotational vibration sensing in disk drives |
| JP4703088B2 (ja) * | 2002-06-28 | 2011-06-15 | ソニー株式会社 | 光学式記録媒体及び情報処理装置 |
| JP2004288229A (ja) * | 2003-01-27 | 2004-10-14 | Fuji Electric Device Technology Co Ltd | 磁気データ埋込装置 |
| WO2004075469A2 (en) * | 2003-02-19 | 2004-09-02 | Dotcast Inc. | Joint, adaptive control of equalization, synchronization, and gain in a digital communications receiver |
| JP2004280963A (ja) * | 2003-03-17 | 2004-10-07 | Fuji Electric Device Technology Co Ltd | 照合機能付磁気データ埋込装置 |
| DE102004014695B4 (de) * | 2003-03-26 | 2007-08-16 | Infineon Technologies Ag | Takt- und Datenwiedergewinnungseinheit |
| FI116341B (fi) * | 2003-04-22 | 2005-10-31 | Nokia Corp | Suodatusmenetelmä ja laitteisto |
| KR100510685B1 (ko) * | 2003-04-22 | 2005-08-31 | 엘지전자 주식회사 | 역방향 매핑에서 에일리어싱 제거 장치 |
| US20040254968A1 (en) * | 2003-06-16 | 2004-12-16 | Ferguson Kevin M. | Interpolation for waveform and vector displays |
| US7203017B1 (en) * | 2003-09-23 | 2007-04-10 | Marvell International Ltd. | Timing recovery for data storage channels with buffered sectors |
| US7002767B2 (en) * | 2003-09-30 | 2006-02-21 | Agere Systems Inc. | Detection of recorded data employing interpolation with gain compensation |
| WO2005050643A1 (ja) * | 2003-11-18 | 2005-06-02 | Sony Corporation | 再生装置および方法、記録媒体、並びにプログラム |
| US20050169415A1 (en) * | 2004-01-30 | 2005-08-04 | Agere Systems Inc. | Timing error recovery system |
| US7466782B1 (en) * | 2004-02-05 | 2008-12-16 | Maxtor Corporation | Methods, apparatus and computer program products for determining the timing of bits based on frequency error |
| US7894333B2 (en) * | 2004-03-22 | 2011-02-22 | Thomson Licensing | Method and apparatus for use in carrier recovery in a communications system |
| US20080253479A1 (en) * | 2004-04-16 | 2008-10-16 | Data Flow Technologies, Inc. | Single and multiple sinewave modulation and demodulation techniques, apparatus, and communications systems |
| EP1601113A1 (en) * | 2004-05-25 | 2005-11-30 | STMicroelectronics S.r.l. | Transmission system, particularly for wcdma cellular telephony |
| US7623600B2 (en) * | 2004-06-02 | 2009-11-24 | Broadcom Corporation | High speed receive equalizer architecture |
| US7405894B2 (en) * | 2004-07-08 | 2008-07-29 | Broadcom Corporation | Frequency, phase, and gain estimation technique for use in a read channel receiver of a hard disk drive |
| US7555040B2 (en) * | 2004-11-05 | 2009-06-30 | Interdigital Technology Corporation | Method and apparatus for generating equalizer filter tap coefficients |
| US7271971B2 (en) * | 2004-12-03 | 2007-09-18 | International Business Machines Corporation | Dynamically adapting a magnetic tape read channel equalizer |
| JP4148951B2 (ja) * | 2005-01-12 | 2008-09-10 | 株式会社東芝 | 磁気記録再生装置 |
| JP4131968B2 (ja) * | 2005-01-24 | 2008-08-13 | 株式会社東芝 | 磁気発振素子を用いた受信装置 |
| JP4583196B2 (ja) * | 2005-02-04 | 2010-11-17 | 富士通セミコンダクター株式会社 | 通信装置 |
| JP2006252681A (ja) * | 2005-03-11 | 2006-09-21 | Hitachi Ltd | 光ディスク装置及びpll回路 |
| US7397849B2 (en) * | 2005-03-18 | 2008-07-08 | Interdigital Technology Corporation | Channel estimation enhanced LMS equalizer |
| US7768732B2 (en) * | 2005-04-12 | 2010-08-03 | Stmicroelectronics, Inc. | Gain controller for a gain loop of a read channel and related gain loops, read channels, systems, and methods |
| US7773324B2 (en) * | 2005-04-12 | 2010-08-10 | Stmicroelectronics, Inc. | Phase acquisition loop for a read channel and related read channel, system, and method |
| US7447262B2 (en) * | 2005-05-12 | 2008-11-04 | Rdc Semiconductor Co., Ltd. | Adaptive blind start-up receiver architecture with fractional baud rate sampling for full-duplex multi-level PAM systems |
| JP4572742B2 (ja) * | 2005-05-26 | 2010-11-04 | ソニー株式会社 | 周波数制御装置および情報再生装置 |
| JPWO2007043124A1 (ja) * | 2005-09-30 | 2009-04-16 | 富士通マイクロエレクトロニクス株式会社 | オーバーサンプリング・トランスバーサル等化器 |
| US7609795B2 (en) * | 2005-10-04 | 2009-10-27 | Via Technologies, Inc. | Interpolation module, interpolator and methods capable of recovering timing in a timing recovery apparatus |
| JP4821264B2 (ja) | 2005-10-25 | 2011-11-24 | ソニー株式会社 | 同期装置、同期方法及び同期プログラム並びにデータ再生装置 |
| US7965759B2 (en) * | 2005-10-28 | 2011-06-21 | Qualcomm Incorporated | Synchronization codes for wireless communication |
| US7917563B1 (en) | 2006-02-07 | 2011-03-29 | Link—A—Media Devices Corporation | Read channel processor |
| US8284870B1 (en) * | 2006-02-07 | 2012-10-09 | Link—A—Media Devices Corporation | Timing loop |
| WO2007091779A1 (en) | 2006-02-10 | 2007-08-16 | Lg Electronics Inc. | Digital broadcasting receiver and method of processing data |
| US9171571B2 (en) * | 2006-02-24 | 2015-10-27 | Stmicrolectronics, Inc. | Read channel operable to calibrate a coefficient of a filter, such as an FIR filter, disposed before an interpolated-timing-recovery circuit, and related integrated circuit, system, and method |
| WO2007126196A1 (en) | 2006-04-29 | 2007-11-08 | Lg Electronics Inc. | Digital broadcasting system and method of processing data |
| US7817366B1 (en) * | 2006-05-09 | 2010-10-19 | Marvell International Ltd. | Gain adjustment before zero phase start |
| WO2007136166A1 (en) | 2006-05-23 | 2007-11-29 | Lg Electronics Inc. | Digital broadcasting system and method of processing data |
| JP2007335012A (ja) * | 2006-06-15 | 2007-12-27 | Fujitsu Ltd | 制御装置および記憶装置 |
| US8441751B1 (en) * | 2006-08-18 | 2013-05-14 | Marvell International Ltd. | Dibit pulse extraction methods and systems |
| US7656970B1 (en) * | 2006-09-01 | 2010-02-02 | Redpine Signals, Inc. | Apparatus for a wireless communications system using signal energy to control sample resolution and rate |
| US7643235B2 (en) * | 2006-09-28 | 2010-01-05 | Seagate Technology Llc | Synchronization for data communication |
| US7873104B2 (en) * | 2006-10-12 | 2011-01-18 | Lg Electronics Inc. | Digital television transmitting system and receiving system and method of processing broadcasting data |
| JP4271228B2 (ja) * | 2006-11-08 | 2009-06-03 | オリンパス株式会社 | 受信装置 |
| JP4528834B2 (ja) * | 2006-11-29 | 2010-08-25 | パナソニック株式会社 | 再生信号処理装置及び映像表示装置 |
| JP4260187B2 (ja) * | 2007-01-25 | 2009-04-30 | 富士通株式会社 | 周波数同期方法及び装置 |
| WO2008097966A2 (en) * | 2007-02-07 | 2008-08-14 | Data Flow Technologies, Inc. | Digital-signal-processing decoding of data modulated onto sinewave carriers |
| US7869547B1 (en) * | 2007-02-15 | 2011-01-11 | Link—A—Media Devices Corporation | Preamble acquisition without second order timing loops |
| US8570679B2 (en) * | 2007-02-21 | 2013-10-29 | Seagate Technology International | Read channel averaging |
| KR101285887B1 (ko) | 2007-03-26 | 2013-07-11 | 엘지전자 주식회사 | 디지털 방송 시스템 및 데이터 처리 방법 |
| KR101253185B1 (ko) | 2007-03-26 | 2013-04-10 | 엘지전자 주식회사 | 디지털 방송 시스템 및 데이터 처리 방법 |
| KR101285888B1 (ko) * | 2007-03-30 | 2013-07-11 | 엘지전자 주식회사 | 디지털 방송 시스템 및 데이터 처리 방법 |
| TWI355831B (en) * | 2007-04-02 | 2012-01-01 | Ind Tech Res Inst | Method for estimating and compensating frequency o |
| WO2009005326A2 (en) * | 2007-07-04 | 2009-01-08 | Lg Electronics Inc. | Digital broadcasting system and method of processing data |
| US8433973B2 (en) * | 2007-07-04 | 2013-04-30 | Lg Electronics Inc. | Digital broadcasting system and method of processing data |
| KR20090012180A (ko) | 2007-07-28 | 2009-02-02 | 엘지전자 주식회사 | 디지털 방송 시스템 및 데이터 처리 방법 |
| US7864477B1 (en) * | 2007-08-13 | 2011-01-04 | Marvell International Ltd. | Circuits, architectures, apparatuses, systems, algorithms and methods and software for automatic gain calibration of a burst signal stream |
| WO2009028857A2 (en) * | 2007-08-24 | 2009-03-05 | Lg Electronics Inc. | Digital broadcasting system and method of processing data in digital broadcasting system |
| US8804769B2 (en) * | 2008-03-04 | 2014-08-12 | Nec Corporation | Signal multiplexing method, signal demultiplexing method, digital signal reference frequency correction method, multiplexing device, demultiplexing device, radio communication system, and digital signal reference frequency correction device |
| CN101599929B (zh) | 2008-06-06 | 2012-11-21 | 富士通株式会社 | 自适应均衡装置和方法 |
| US8130021B2 (en) | 2009-01-09 | 2012-03-06 | International Business Machines Corporation | Gain control with multiple integrators |
| US7982992B2 (en) * | 2009-01-09 | 2011-07-19 | International Business Machines Corporation | Dual gain control for magnetic data storage system |
| US8174949B2 (en) * | 2009-07-02 | 2012-05-08 | Lsi Corporation | Systems and methods for format efficient timing recovery in a read channel |
| GB2520650B (en) * | 2009-07-23 | 2015-11-04 | Coreoptics Inc | Clock recovery for optical transmission systems |
| US8139305B2 (en) * | 2009-09-14 | 2012-03-20 | Lsi Corporation | Systems and methods for timing and gain acquisition |
| US8289061B2 (en) * | 2009-09-29 | 2012-10-16 | Integrated Device Technology, Inc. | Technique to reduce clock recovery amplitude modulation in high-speed serial transceiver |
| US8566381B2 (en) | 2010-08-05 | 2013-10-22 | Lsi Corporation | Systems and methods for sequence detection in data processing |
| US8237597B2 (en) | 2010-09-21 | 2012-08-07 | Lsi Corporation | Systems and methods for semi-independent loop processing |
| US8566378B2 (en) | 2010-09-30 | 2013-10-22 | Lsi Corporation | Systems and methods for retry sync mark detection |
| US8614858B2 (en) | 2010-11-15 | 2013-12-24 | Lsi Corporation | Systems and methods for sync mark detection metric computation |
| US8498072B2 (en) | 2010-11-29 | 2013-07-30 | Lsi Corporation | Systems and methods for spiral waveform detection |
| US8526131B2 (en) | 2010-11-29 | 2013-09-03 | Lsi Corporation | Systems and methods for signal polarity determination |
| JP5510297B2 (ja) * | 2010-12-06 | 2014-06-04 | 富士通株式会社 | 受信回路 |
| US8411385B2 (en) | 2010-12-20 | 2013-04-02 | Lsi Corporation | Systems and methods for improved timing recovery |
| US8325433B2 (en) | 2011-01-19 | 2012-12-04 | Lsi Corporation | Systems and methods for reduced format data processing |
| US8261171B2 (en) | 2011-01-27 | 2012-09-04 | Lsi Corporation | Systems and methods for diversity combined data detection |
| US8749908B2 (en) | 2011-03-17 | 2014-06-10 | Lsi Corporation | Systems and methods for sync mark detection |
| US8565047B2 (en) | 2011-04-28 | 2013-10-22 | Lsi Corporation | Systems and methods for data write loopback based timing control |
| US8665544B2 (en) | 2011-05-03 | 2014-03-04 | Lsi Corporation | Systems and methods for servo data detection |
| US8874410B2 (en) | 2011-05-23 | 2014-10-28 | Lsi Corporation | Systems and methods for pattern detection |
| JP2013016908A (ja) * | 2011-06-30 | 2013-01-24 | Rohm Co Ltd | 正弦波発生装置、デジタル信号プロセッサ、および音声出力装置 |
| US8498071B2 (en) | 2011-06-30 | 2013-07-30 | Lsi Corporation | Systems and methods for inter-track alignment |
| US8669891B2 (en) | 2011-07-19 | 2014-03-11 | Lsi Corporation | Systems and methods for ADC based timing and gain control |
| US8780476B2 (en) * | 2011-09-23 | 2014-07-15 | Lsi Corporation | Systems and methods for controlled wedge spacing in a storage device |
| US8773811B2 (en) | 2011-12-12 | 2014-07-08 | Lsi Corporation | Systems and methods for zone servo timing gain recovery |
| US8681444B2 (en) | 2012-06-07 | 2014-03-25 | Lsi Corporation | Multi-zone servo processor |
| US8625216B2 (en) | 2012-06-07 | 2014-01-07 | Lsi Corporation | Servo zone detector |
| US8564897B1 (en) | 2012-06-21 | 2013-10-22 | Lsi Corporation | Systems and methods for enhanced sync mark detection |
| US9450745B2 (en) * | 2012-10-11 | 2016-09-20 | Samsung Electronics Co., Ltd. | Method and apparatus for radio frequency (RF) pulse synchronization in super regenerative receiver (SRR) |
| US9019641B2 (en) | 2012-12-13 | 2015-04-28 | Lsi Corporation | Systems and methods for adaptive threshold pattern detection |
| US9053217B2 (en) | 2013-02-17 | 2015-06-09 | Lsi Corporation | Ratio-adjustable sync mark detection system |
| US8693121B1 (en) * | 2013-03-06 | 2014-04-08 | Lsi Corporation | Oversampling storage system captured waveform |
| US8780470B1 (en) | 2013-03-11 | 2014-07-15 | Western Digital Technologies, Inc. | Disk drive adjusting digital phase locked loop over sector data with frequency induced phase error measured over preamble |
| US8947811B1 (en) * | 2013-03-12 | 2015-02-03 | Western Digital Technologies, Inc. | Disk drive using preamble and postamble to adjust asynchronous signal samples of payload |
| JP6032349B2 (ja) * | 2013-03-13 | 2016-11-24 | 日本電気株式会社 | 利得制御装置及び利得制御方法 |
| US9112538B2 (en) * | 2013-03-13 | 2015-08-18 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Systems and methods for loop feedback |
| US9424876B2 (en) | 2013-03-14 | 2016-08-23 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Systems and methods for sync mark mis-detection protection |
| US9275655B2 (en) | 2013-06-11 | 2016-03-01 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Timing error detector with diversity loop detector decision feedback |
| US10152999B2 (en) | 2013-07-03 | 2018-12-11 | Avago Technologies International Sales Pte. Limited | Systems and methods for correlation based data alignment |
| US9019645B1 (en) * | 2013-07-09 | 2015-04-28 | Marvell International Ltd. | Applying digital frequency offset to timing loop |
| US9129650B2 (en) | 2013-07-25 | 2015-09-08 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Array-reader based magnetic recording systems with frequency division multiplexing |
| US9129646B2 (en) | 2013-09-07 | 2015-09-08 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Array-reader based magnetic recording systems with mixed synchronization |
| US8976475B1 (en) | 2013-11-12 | 2015-03-10 | Lsi Corporation | Systems and methods for large sector dynamic format insertion |
| US9722768B2 (en) * | 2013-11-15 | 2017-08-01 | National Institute Of Advanced Industrial Science And Technology | Received signal processing device, communication system, and received signal processing method |
| US8861112B1 (en) * | 2014-04-23 | 2014-10-14 | Lsi Corporation | Two dimensional magnetic recording system head separation estimator |
| US9224420B1 (en) | 2014-10-02 | 2015-12-29 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Syncmark detection failure recovery system |
| US9064539B1 (en) * | 2014-10-02 | 2015-06-23 | Lsi Corporation | Systems and methods for timing control in a data processing system |
| JP6246153B2 (ja) * | 2015-03-30 | 2017-12-13 | ソニーセミコンダクタソリューションズ株式会社 | 位相同期装置、位相同期方法、およびプログラム |
| US9313017B1 (en) * | 2015-06-11 | 2016-04-12 | Xilinx, Inc. | Baud-rate CDR circuit and method for low power applications |
| US9613652B2 (en) * | 2015-07-24 | 2017-04-04 | Seagate Technology Llc | Phase error recovery circuitry and method for a magnetic recording device |
| US9525576B1 (en) | 2015-07-24 | 2016-12-20 | Seagate Technology Llc | Self-adapting phase-locked loop filter for use in a read channel |
| US9923737B2 (en) * | 2015-08-24 | 2018-03-20 | Texas Instruments Incorporated | Analog-digital compatible re-sampling |
| JP2017084256A (ja) * | 2015-10-30 | 2017-05-18 | 国立大学法人東北大学 | センサシステム |
| WO2019046823A1 (en) * | 2017-08-31 | 2019-03-07 | Chaos Prime, Inc. | HIGH PSK SIGNALING TECHNIQUES (HOPS) FOR LOW POWER SPREAD SPECTRUM COMMUNICATIONS |
| US10665254B1 (en) * | 2018-05-21 | 2020-05-26 | Seagate Technology Llc | Readback waveform oversampling method and apparatus |
| US10176835B1 (en) * | 2018-06-22 | 2019-01-08 | Western Digital Technologies, Inc. | Data storage device employing predictive oversampling for servo control |
| CN112583571A (zh) * | 2019-09-30 | 2021-03-30 | 深圳市中兴微电子技术有限公司 | 一种信号的采样方法及装置 |
| US11171815B2 (en) * | 2020-01-21 | 2021-11-09 | Credo Technology Group Limited | Digital equalizer with overlappable filter taps |
| US11038602B1 (en) * | 2020-02-05 | 2021-06-15 | Credo Technology Group Limited | On-chip jitter evaluation for SerDes |
| US11295777B1 (en) * | 2020-10-30 | 2022-04-05 | Seagate Technology Llc | System and method for managing off-track read retry |
| US11689191B2 (en) * | 2021-03-30 | 2023-06-27 | Stmicroelectronics International N.V. | High frequency resolution digital sinusoid generator |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5424881A (en) * | 1993-02-01 | 1995-06-13 | Cirrus Logic, Inc. | Synchronous read channel |
| US5576904A (en) * | 1994-09-27 | 1996-11-19 | Cirrus Logic, Inc. | Timing gradient smoothing circuit in a synchronous read channel |
| US5572558A (en) * | 1994-11-17 | 1996-11-05 | Cirrus Logic, Inc. | PID loop filter for timing recovery in a sampled amplitude read channel |
| US5999355A (en) * | 1996-04-30 | 1999-12-07 | Cirrus Logic, Inc. | Gain and phase constrained adaptive equalizing filter in a sampled amplitude read channel for magnetic recording |
| US6819514B1 (en) | 1996-04-30 | 2004-11-16 | Cirrus Logic, Inc. | Adaptive equalization and interpolated timing recovery in a sampled amplitude read channel for magnetic recording |
| JP4576008B2 (ja) | 1998-05-22 | 2010-11-04 | 株式会社日立グローバルストレージテクノロジーズ | 信号処理装置及び該信号処理装置を搭載したデータ記録再生装置 |
| JP2000243042A (ja) | 1999-02-19 | 2000-09-08 | Matsushita Electric Ind Co Ltd | クロックリカバリ装置 |
| JP3337997B2 (ja) * | 1999-03-29 | 2002-10-28 | 松下電器産業株式会社 | 周波数検出型位相同期回路 |
| JP3486145B2 (ja) * | 2000-01-17 | 2004-01-13 | 松下電器産業株式会社 | デジタル記録データ再生装置 |
| US6285219B1 (en) * | 2000-03-30 | 2001-09-04 | Adaptec, Inc. | Dual mode phase and frequency detector |
-
2002
- 2002-03-29 JP JP2002095505A patent/JP4109003B2/ja not_active Expired - Fee Related
- 2002-10-18 US US10/273,485 patent/US7054088B2/en not_active Expired - Fee Related
-
2006
- 2006-03-24 US US11/388,377 patent/US7515369B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7515369B2 (en) | 2009-04-07 |
| JP2003281831A (ja) | 2003-10-03 |
| US7054088B2 (en) | 2006-05-30 |
| US20030137765A1 (en) | 2003-07-24 |
| US20060181797A1 (en) | 2006-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4109003B2 (ja) | 情報記録再生装置、信号復号回路及び方法 | |
| JP4812586B2 (ja) | 非対称性キャンセル・コンポーネント、ストレージ・ドライブ | |
| US7551668B2 (en) | Adaptive equalizing apparatus and method | |
| US6009549A (en) | Disk storage system employing error detection and correction of channel coded data, interpolated timing recovery, and retroactive/split-segment symbol synchronization | |
| US8837068B1 (en) | Two dimensional magnetic recording servo system adaptive combination | |
| JP2005276412A (ja) | 動的な等化器最適化を行うための装置 | |
| US20070279784A1 (en) | Information Reproduction Apparatus | |
| JP2001184795A (ja) | 適応等化器を内蔵した情報検出回路およびこれを用いた光ディスク装置 | |
| JP2004080210A (ja) | デジタルフィルタ | |
| AU1150492A (en) | Adaptive decision feedback equalizer apparatus for processing information stored on digital storage media | |
| JP3767238B2 (ja) | 信号処理装置 | |
| US6791776B2 (en) | Apparatus for information recording and reproducing | |
| JP2006511025A (ja) | 非同期クロストークキャンセル | |
| JP2003016734A (ja) | 情報記録再生装置、信号復号回路、情報記録媒体の記録構造及び方法 | |
| JP4480584B2 (ja) | 適応等化回路及び適応等化方法 | |
| JP3609721B2 (ja) | デジタルデータ再生装置及びデジタルデータ再生方法 | |
| JP2006286188A (ja) | データ貯蔵機器のデータ検出方法及び装置 | |
| JPH11232782A (ja) | 記録再生装置 | |
| US11170815B1 (en) | Cancelling adjacent track interference | |
| US7978792B2 (en) | Reproducing apparatus and method, signal processing apparatus and method, and program | |
| JP4650130B2 (ja) | 信号処理装置、信号処理方法 | |
| US10460762B1 (en) | Cancelling adjacent track interference signal with different data rate | |
| JPH07302467A (ja) | 波形等化チャネル | |
| JP4645331B2 (ja) | 信号処理装置、信号処理方法 | |
| JPH08255306A (ja) | データ記録再生システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050311 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071211 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080311 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080403 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110411 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110411 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110411 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |