JP3777403B2 - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP3777403B2 JP3777403B2 JP2002122875A JP2002122875A JP3777403B2 JP 3777403 B2 JP3777403 B2 JP 3777403B2 JP 2002122875 A JP2002122875 A JP 2002122875A JP 2002122875 A JP2002122875 A JP 2002122875A JP 3777403 B2 JP3777403 B2 JP 3777403B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- load state
- load
- transistor
- boosting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Description
【発明の属する技術分野】
本発明は、自動車や車両の操舵系にモータによるアシスト力を付与する電動パワーステアリング装置に係り、詳しくは、車載バッテリからのモータへの供給電流を調整することができる昇圧回路を備えた電動パワーステアリング装置に関する。
【0002】
【従来の技術】
従来から、モータの回転力を利用して、ステアリングホイールの操作を補助する電動パワーステアリング装置が用いられている。
【0003】
このような電動パワーステアリング装置においては、運転者がステアリングホイールを回転させて操舵を行った時に、アシスト制御による操舵トルクに応じたアシスト指令値が算出され、このアシスト指令値に基づいた操舵補助力が、モータからステアリング機構に与えられるようになっている。
【0004】
ところで、前記のような電動パワーステアリング装置は大きなトルクを得ようとするために大電流を必要とするシステムである。
従来は、車載バッテリ(DC12V)を直に印加するようにしており、モータもDC12V仕様のものを使用し、大電流を前記モータに供給するために、モータの大型化、使用配線の大容量化(太線化)は避けることはできない。
【0005】
この問題を解決するため、車載バッテリからの供給電流を調整することができる電動パワーステアリング装置(特開平8−127350号公報)等が提案されている。
【0006】
この電動パワーステアリング装置においては、モータに電流を供給する回路に図11に示すような昇圧回路300及び昇圧回路制御装置301を設けている。昇圧回路300は、車載バッテリからのバッテリ電圧VPIG(DC12V)の印加点P1と前記モータへの電圧印加点P2との間に設けられている。昇圧回路300はコンデンサC1,C2、コイルL、ダイオードD、スイッチング用の第1トランジスタQ1を備えている。
【0007】
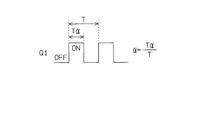
昇圧回路制御装置301は、昇圧回路300の第1トランジスタQ1に対して、昇圧のためのPWM演算により制御量としてのデューティ比が演算される。そして、昇圧回路制御装置301は、このデューティ比に基づいてデューティ比駆動信号(PWM駆動信号)を出力し、このデューティ比駆動信号によって、第1トランジスタQ1をデューティ制御する。このデューティ制御により、第1トランジスタQ1が図12に示すようにスイッチング動作を行ない、この結果、コイルLでエネルギーの蓄積と放出とが繰り返され、ダイオードDのカソード側に放出の際の高電圧が現れる。なお、図12に示すように本明細書中、Tαはオン時間、Tはパルス周期、αはデューティ比(オンデューティ)を示している。第1トランジスタQ1がオンとなるとコイルLに電流が流れ、第1トランジスタQ1がオフとなるとコイルLに流れる電流が遮断される。
【0008】
コイルLに流れる電流が遮断されると、この電流の遮断による磁束の変化を妨げるように、ダイオードDのカソード側に高電圧が発生する。この繰り返しによって、ダイオードDのカソード側に高電圧が繰り返し発生し、コンデンサC2で平滑(充電)され、出力電圧VBPIG として電圧印加点P2に生じる。
【0009】
このとき、昇圧回路300により、昇圧する電圧は昇圧回路制御装置301から出力されるデューティ比駆動信号のデューティ比と関連する。デューティ比が大きければ出力電圧VBPIGは高くなり、デューティ比が小さければ出力電圧VBPIGは低くなる。
【0010】
上記の昇圧回路300においては、ダイオードDを使用しているため、モータが回生状態に入ったとき、このダイオードDのために電圧印加点P2側からバッテリBに電流が流れることができず、出力電圧VBPIGが上昇する。この電圧の上昇により、昇圧回路300が破損する虞があった。例えば、上記例では、昇圧回路300を構成しているコンデンサC2が破壊される虞がある。
【0011】
そこで、本出願人は、ダイオードDに代えて、図4に示すように第2トランジスタQ2を接続した昇圧回路を提案している。すなわち、第2トランジスタQ2は、ソースがコイルLに接続され、ドレインが電圧印加点P2に接続したものである。この構成においては、第1トランジスタQ1と第2トランジスタQ2とを交互にオンオフする、すなわち同期整流方式にて制御している。
【0012】
従って、モータの回生状態時には、第2トランジスタQ2がデューティ制御によりオン作動し、回生電流は第2トランジスタQ2を介してバッテリBに流れることにより吸収される。この結果、コンデンサC2の破壊を防止できる。
【0013】
ところで、この提案した構成において、力行時にはモータの負荷状態に応じて、高負荷の場合、第1トランジスタQ1、第2トランジスタQ2を同期整流方式で駆動し、低負荷の場合には、第1トランジスタQ1のみをPWM駆動し、第2トランジスタQ2は全オフする非同期整流方式が考えられる。
【0014】
これは、モータが低負荷の場合には、第2トランジスタQ2のスイッチングロスがなくなるためで好ましい。
例えば、モータ回転数が高い領域の場合には、高負荷であるとして同期整流し、モータ回転数が低い領域の場合、低負荷であるとして非同期整流を行うようにする。
【0015】
【発明が解決しようとする課題】
しかし、このような場合、ステアリングホイール(ハンドル)を左右に繰り返し操舵していると、ステアリングホイールを切り返す瞬間に、モータが一瞬停止するため、非同期整流に移行し、ステアリングホイールが動き出すと、同期整流に移行する。そのため、非同期整流・同期整流を繰り返すことになる。
【0016】
非同期整流から同期整流に移行する瞬間に昇圧電圧が乱れるため、この結果、操舵フィーリングが悪化する虞があった。
本発明の目的は、上記問題点に着目して、ステアリングの切返し操舵による操舵フィーリングの悪化を防止することができ、又、通常走行上、最も多い直線走行では、非同期整流によるPWM駆動にて行うため、昇圧回路の発熱を抑制できる電動パワーステアリング装置を提供することにある。
【0017】
【課題を解決するための手段】
上記問題点を解決するために、請求項1に記載の発明は、電動機制御値に基づいて電動機を駆動する電動機駆動手段と、直流電源と前記電動機駆動手段間に設けられ、電源電圧を昇圧する昇圧手段と、PWM駆動信号を生成出力する昇圧制御手段とを備え、前記昇圧手段は、直流電源の出力端子に接続された昇圧用コイルと、同昇圧用コイルの出力端子に対して共に接続された第1スイッチング素子と第2スイッチング素子と、前記第2スイッチング素子の出力端子に接続された昇圧用コンデンサとを備え、前記両スイッチング素子の内少なくとも前記第1スイッチング素子を前記PWM駆動することにより、前記直流電源から昇圧用コイルに供給される電流を制御し、前記昇圧用コンデンサに昇圧電圧を充電する電動パワーステアリング装置において、電動機の負荷状態を判定する負荷状態判定手段を設け、前記昇圧制御手段は、前記負荷状態判定手段の判定結果により電動機が高負荷のときは、前記両スイッチング素子を同期整流し、低負荷のときは、低負荷状態が所定時間継続したときに第1スイッチング素子のみをPWM制御して非同期整流することを特徴とする電動パワーステアリング装置。
【0018】
請求項2の発明は、請求項1において、前記昇圧制御手段は、高負荷のときは、PWM駆動信号のキャリア周波数を高周波数にして前記両スイッチング素子を同期整流し、低負荷のときは、低負荷状態が所定時間継続したときに前記両スイッチング素子の内、第1スイッチング素子のみを、PWM駆動信号のキャリア周波数を低周波数にして非同期整流することを特徴とする。
【0019】
請求項3の発明は、請求項1及び請求項2において、操舵トルクを検出する操舵トルク検出手段を備え、前記負荷状態判定手段は、前記操舵トルク検出手段が検出した操舵トルクが小のときは、電動機の負荷状態が低負荷であると判定し、操舵トルクが大のときは電動機の負荷状態が高負荷であると判定することを特徴とする。
【0020】
請求項4の発明は、請求項1及び請求項2において、前記電動機の回転数を推定する電動機回転数推定手段を備え、前記負荷状態判定手段は、前記電動機回転数推定手段が推定した回転数が小のときは、電動機の負荷状態が低負荷であると判定し、回転数が大のときは、電動機の負荷状態が高負荷であると判定することを特徴とする。
【0021】
請求項5の発明は、請求項1及び請求項2において、前記負荷状態判定手段は、前記電動機制御値、又は、電動機に流れる実電流の検出値に基づいて電動機の負荷状態を判定することを特徴とする。
【0022】
【発明の実施の形態】
(第1実施形態)
以下、本発明を具体化した電動パワーステアリング装置の実施形態を図1〜図7に従って説明する。
【0023】
図1は、電動パワーステアリング装置の制御装置20の概略を示す。
ステアリングホイール1(ハンドル)に連結したステアリングシャフト2には、トーションバー3が設けられている。このトーションバー3には、トルクセンサ4が装着されている。そして、ステアリングシャフト2が回転してトーションバー3に力が加わると、加わった力に応じてトーションバー3が捩れ、その捩れ、即ちステアリングホイール1にかかる操舵トルクτをトルクセンサ4が検出している。
【0024】
トルクセンサ4は操舵トルク検出手段を構成している。
又、ステアリングシャフト2には減速機5が固着されている。この減速機5には電動機としての電動モータ(以下、モータ6という)の回転軸に取着したギア7が噛合されている。前記モータ6は、三相同期式永久磁石モータで構成したブラシレスモータである。
【0025】
又、モータ6には、同モータ6の回転角を検出するためのロータリエンコーダにより構成された回転角センサ30が組み付けられている(図2参照)。回転角センサ30は、モータ6の回転子の回転に応じてπ/2ずつ位相の異なる2相パルス列信号と基準回転位置を表す零相パルス列信号を出力する。
【0026】
更に、減速機5にはピニオンシャフト8が固着されている。ピニオンシャフト8の先端には、ピニオン9が固着されるとともに、このピニオン9はラック10と噛合している。ラック10の両端には、タイロッド12が固設されており、そのタイロッド12の先端部にはナックル13が回動可能に連結されている。このナックル13には、タイヤとしての前輪14が固着されている。又、ナックル13の一端は、クロスメンバ15に回動可能に連結されている。
【0027】
従って、モータ6が回転すると、その回転数は減速機5によって減少されてピニオンシャフト8に伝達され、ピニオン及びラック機構11を介してラック10に伝達される。そして、ラック10は、タイロッド12を介してナックル13に設けられた前輪14の向きを変更して車両の進行方向を変えることができる。
【0028】
前輪14には、車速センサ16が設けられている。
次に、この電動パワーステアリング装置の制御装置(以下、制御装置20という)の電気的構成を示す。
【0029】
トルクセンサ4は、ステアリングホイール1の操舵トルクτに応じた電圧を出力している。車速センサ16は、その時の車速を前輪14の回転数に相対する周期のパルス信号として出力する。
【0030】
制御装置20は、中央処理装置(CPU21)、読み出し専用メモリ(ROM22)及びデータを一時記憶する読み出し及び書き込み専用メモリ(RAM23)を備えている。このROM22には、CPU21による演算処理を行わせるための制御プログラムが格納されている。RAM23は、CPU21が演算処理を行うときの演算処理結果等を一時記憶する。
【0031】
ROM22は、図示しない基本アシストマップが格納されている。基本アシストマップは、操舵トルクτ(回動トルク)に対応し、かつ車速に応じた基本アシスト電流を求めるためのものであり、操舵トルクτに対する基本アシスト電流が記憶されている。
【0032】
この制御装置20が、三相同期式永久磁石モータを駆動制御する機能は公知の構成であるため、簡単に説明する。
図3は、前記CPU21内部において、プログラムで実行される機能を示す制御ブロック図である。同制御ブロック図で図示されている各部は、独立したハードウエアを示すものではなく、CPU21で実行される機能を示している。
【0033】
CPU21は内部にて、指令トルクτ*を計算するための基本アシスト力演算部51、戻し力演算部52及び加算部53を備える。基本アシスト力演算部51は、トルクセンサ4からの操舵トルクτ及び車速センサ16によって検出された車速Vを入力し、操舵トルクτの増加にしたがって増加するとともに車速Vの増加にしたがって減少するアシストトルクを計算する。
【0034】
戻し力演算部52は、車速Vと共にモータ6の回転子の電気角θ(回転角に相当)及び角速度ωを入力し、これらの入力値に基づいてステアリングシャフト2の基本位置への復帰力及びステアリングシャフト2の回転に対する抵抗力に対応した戻しトルクを計算する。加算部53は、アシストトルクと戻しトルクを加算することにより指令トルクτ*を計算し、指令電流設定部54に出力する。
【0035】
指令電流設定部54は、指令トルクτ*に基づいて、2相のd軸指令電流Id*,q軸指令電流Iq*を計算する。両指令電流は、モータ6の回転子上の永久磁石が作り出す回転磁束と同期した回転座標系において、永久磁石の磁束の方向と同一方向のd軸及びこれに直交したq軸にそれぞれ対応する。
【0036】
d軸指令電流Id*,q軸指令電流Iq*は減算器55,56に供給される。減算器55,56は、d軸指令電流Id*,q軸指令電流Iq*と、d軸検出電流Id及びq軸検出電流Iqとのそれぞれの差分値ΔId,ΔIqを演算し、その結果をPI制御部(比例積分制御部)57,58に供給する。
【0037】
PI制御部57,58は、差分値ΔId,ΔIqに基づきd軸検出電流Id及びq軸検出電流Iqがd軸指令電流Id*,q軸指令電流Iq*に追従するようにd軸指令電圧Vd*及びq軸指令電圧Vq*をそれぞれ計算する。
【0038】
d軸指令電圧Vd*及びq軸指令電圧Vq*は、非干渉制御補正値演算部63及び減算器59,60により、d軸補正指令電圧Vd**及びq軸補正指令電圧Vq**に補正されて2相/3相座標変換部61に供給される。
【0039】
非干渉制御補正値演算部63は、d軸検出電流Id及びq軸検出電流Iq及びモータ6の回転子の角速度ωに基づいて、d軸指令電圧Vd*及びq軸指令電圧Vq*のための非干渉制御補正値 ω・La・Iq,−ω・(φa+La・Id)を計算する。なお、インダクタンスLa、及び磁束φaは、予め決められた定数である。
【0040】
減算器59,60は、d軸指令電圧Vd*及びq軸指令電圧Vq*から前記非干渉制御補正値をそれぞれ減算することにより、d軸補正指令電圧Vd**及びq軸補正指令電圧Vq**を算出して、2相/3相座標変換部61に出力する。2相/3相座標変換部61は、d軸補正指令電圧Vd**及びq軸補正指令電圧Vq**を3相指令電圧Vu*,Vv*,Vw*に変換して、同変換した3相指令電圧Vu*,Vv*,Vw*をPWM制御部62に出力する。
【0041】
PWM制御部62は、この3相指令電圧Vu*,Vv*,Vw*に対応したPWM制御信号UU,VU,WU(PWM波信号及びモータ6の回転方向を表す信号を含む)に変換し、インバータ回路であるモータ駆動装置35に出力する。
【0042】
前記q軸指令電流Iq*は電動機制御値に相当する。モータ駆動装置35は、電動機駆動手段に相当する。
モータ駆動装置35は、図2に示すようにFET(Field-Effect Transistor) 81U,82Uの直列回路と、FET81V,82Vの直列回路と、FET81W,82Wの直列回路とを並列に接続して構成されている。各直列回路には、車両に搭載されたバッテリの電圧よりも昇圧された電圧が印加されている。そして、FET81U,82U間の接続点83Uがモータ6のU相巻線に接続され、FET81V,82V間の接続点83Vがモータ6のV相巻線に接続され、FET81W,82W間の接続点83Wがモータ6のW相巻線に接続されている。
【0043】
FET81U,82U、FET81V,82V及びFET81W,82Wには、それぞれPWM制御部62からPWM制御信号UU,VU,WU(各相のPWM制御信号にはPWM波信号及びモータ6の回転方向を表す信号を含む)が入力される。
【0044】
モータ駆動装置35は、PWM制御信号UU,VU,WUに対応した3相の励磁電流を発生して、3相の励磁電流路を介してモータ6にそれぞれ供給する。
3相の励磁電流路のうちの2つには電流センサ71,72が設けられ、各電流センサ71,72は、モータ6に対する3相の励磁電流Iu,Iv,Iwのうちの2つの励磁電流Iu,Ivを検出して図3に示す3相/2相座標変換部73に出力する。
【0045】
なお、3相/2相座標変換部73には、演算器74にて励磁電流Iu,Ivに基づいて計算された励磁電流Iwが入力される。3相/2相座標変換部73は、これらの励磁電流Iu,Iv,Iwを2相のd軸検出電流Id及びq軸検出電流Iqに変換し、減算器55,56、非干渉制御補正値演算部63に入力する。
【0046】
又、回転角センサ30からの2相パルス列信号及び零相パルス列信号は、所定のサンプリング周期で電気角変換部64に連続的に供給されている。電気角変換部64は、前記各パルス列信号に基づいてモータ6における回転子の固定子に対する電気角θを演算し、演算された電気角θを角速度変換部65に入力する。角速度変換部65は、電気角θを微分して回転子の固定子に対する角速度ωを演算する。角速度ωは、正により回転子の正方向の回転を表し、負により回転子の負方向の回転を表している。
【0047】
次に、バッテリ電圧を昇圧する昇圧回路100及び同昇圧回路100を制御する昇圧回路制御装置について説明する。本実施形態では、昇圧回路制御装置は、前記CPU21が兼用している。昇圧回路100は昇圧手段に相当する。
【0048】
昇圧回路100は、直流電源としての車載バッテリ(以下、バッテリBという)とモータ駆動装置35間の電流供給回路に設けられている。
本実施形態の昇圧回路100においては、印加点P1と電圧印加点P2間に、昇圧用コイル(以下、単にコイルLという)と、第2トランジスタQ2が接続されている。前記第2トランジスタQ2は、ソースがコイルLの出力端子に接続され、ドレインが電圧印加点P2に接続されている。又、第2トランジスタQ2のゲートは制御装置20のCPU21に接続されている。D2は第2トランジスタQ2の寄生ダイオードである。
【0049】
又、印加点P1は整流用のコンデンサC1を介して接地されている。印加点P1は、直流電源の出力端子に相当する。電圧印加点P2は昇圧用のコンデンサC2を介して接地されている。
【0050】
前記コンデンサC2は第2トランジスタQ2の出力端子となるドレインに接続されている。コンデンサC2は、昇圧用コイルによる昇圧電圧を充電する昇圧用コンデンサに相当する。
【0051】
第1トランジスタQ1は、ドレインがコイルLの出力端子と第2トランジスタQ2の接続点に接続され、ソースが接地されている。又、第1トランジスタQ1のゲートは昇圧回路制御装置101のCPU21に接続されている。D1は第1トランジスタQ1の寄生ダイオードである。電圧印加点P2の電圧検出のために、電圧印加点P2は制御装置20のCPU21の図示しない電圧入力ポートに接続され、出力電圧VBPIGを実測値として検出可能にされている。
【0052】
前記第1トランジスタQ1及び第2トランジスタQ2はnチャンネル形のMOSFETからなる。第1トランジスタQ1は第1スイッチング素子を構成し、第2トランジスタQ2は第2スイッチング素子に相当する。
【0053】
次に、前記両トランジスタを制御するCPU21について説明する。
図5は、CPU21の機能ブロック図を示している。すなわち、CPU21内部において、プログラムで実行される機能を示す制御ブロック図である。
【0054】
同制御ブロック図で図示されている各部は、独立したハードウエアを示すものではなく、CPU21で実行される機能を示す。
CPU21は昇圧制御手段及び負荷状態判定手段を構成する。
【0055】
CPU21は、演算器110、PID制御部120、PWM演算部130、A/D変換部150を備えている。
演算器110は、ROM22に予め格納されている目標出力電圧VBPIG*(本実施形態では20V)と、A/D変換部150を介して入力したVBPIGとの偏差を算出し、PID制御部120にその偏差を供給する。
【0056】
PID制御部120は、その偏差を縮小すべく、すなわち、フィードバック制御を行うために、比例(P)・積分(I)・微分(D)処理を施して、第1トランジスタQ1,第2トランジスタQ2の制御量を演算する回路である。PID制御部120にて演算された制御量は、さらにPWM演算部130によって制御量に対応するデューティ比αが演算されてデューティ比駆動信号(PWM駆動信号)に変換され、該変換されたデューティ比駆動信号が昇圧回路100の各トランジスタに印加される。
【0057】
なお、本実施形態では、前記演算されたデューティ比駆動信号を、第1トランジスタQ1と第2トランジスタQ2に対して印加して交互にオンオフ制御する同期整流方式(図6(a)参照)、又は第1トランジスタQ1のみに印加してPWM駆動する非同期整流方式にて行われる(図6(b)参照)。
【0058】
同期整流方式は、力行時のモータ6の高負荷のとき及び回生時に行われ、非同期整流方式は、力行時のモータ6の低負荷のときに行われる。なお、低負荷は、本明細書では負荷が印加されない無負荷の場合も含む趣旨である。
【0059】
図6(a)は第1トランジスタQ1に印加するパルス信号(デューティ比駆動信号)を示しており、Tαはオン時間、Tはパルス周期、αは第1トランジスタQ1に係るデューティ比(オンデューティ)である。なお、第2トランジスタQ2に係るデューティ比は(1−|α|)となる。
【0060】
なお、デューティ比αが「+」のときは力行状態、「−」のときは回生状態である。
第1実施形態では、力行状態でのデューティ比αは、0≦α≦α0<1としている。α0は制限値であり、PWM演算部130にてデューティ比αを算出した結果が、α0を超える場合には、デューティ比αとして、α0が決定される。
【0061】
回生状態でのデューティ比αは、0≦|α|≦1としている。
なお、第1実施形態を始めとして、他の実施形態において、第2トランジスタQ2が第1トランジスタQ1と交互にオンオフする場合、第2トランジスタQ2のデューティ比については(1−|α|)にて算出できるため、特に断らない限り説明を省略する。
【0062】
又、第2トランジスタQ2に対しては、第1トランジスタQ1がオンのときは、オフとし、第1トランジスタQ1がオフのときには、オンするパルス信号(デューティ比駆動信号)が印加される。
【0063】
(第1実施形態の作用)
さて、図7は、CPU21が実行する力行時に実行される制御プログラムのフローチャートであり、デューティ比αが「+」のときに所定の制御周期で実行される。
【0064】
S10では、操舵トルクτ及び閾値τ0を読込む。なお、閾値τ0は、予めROM22に格納されている。S20においては、操舵トルクτと閾値τ0との大小関係を判定する。すなわち、モータ6が低負荷状態か、或いは高負荷状態かを判定する。操舵トルクτが、閾値τ0以下の場合には、モータ6が低負荷であるとして、S40に移行し、操舵トルクτが閾値τ0を越えている場合には、モータ6が高負荷であるとして、S30に移行する。
【0065】
S30では、同期整流方式で、CPU21は第1トランジスタQ1、第2トランジスタQ2をPWM駆動する。すなわち、図6(a)に示す駆動パターンのデューティ比駆動信号により、第1トランジスタQ1,第2トランジスタQ2を交互にオンオフ駆動する。
【0066】
詳説すると、力行時の高負荷時においては、昇圧回路100では前記デューティ比駆動信号によるデューティ制御により、第1トランジスタQ1がスイッチング動作を行なう。この結果、コイルLでエネルギーの蓄積と放出とが繰り返され、第2トランジスタQ2のドレイン側に放出の際、高電圧が現れる。すなわち、第1トランジスタQ1がオンして、第2トランジスタQ2がオフすると、第1トランジスタQ1を介して接地側に電流が流れる。次に第1トランジスタQ1がオフとなると、コイルLに流れる電流が遮断される。コイルL1に流れる電流が遮断されると、この電流の遮断による磁束の変化を妨げるように、オン作動している第2トランジスタQ2のドレイン側に高電圧が発生する。この繰り返しによって、第2トランジスタQ2のドレイン側に高電圧が繰り返し発生し、コンデンサC2で平滑(充電)され、出力電圧VBPIG として電圧印加点P2に生じる。
【0067】
このとき、昇圧回路100により、昇圧される電圧はCPU21から出力されるデューティ比駆動信号のデューティ比αと関連する。デューティ比αが大きければ出力電圧VBPIGは高くなり、デューティ比αが小さければ出力電圧VBPIGは低くなる。
【0068】
S30の処理後、一旦このフローチャートを終了する。
S40では、カウンタCを1つインクリメントし、S50でカウンタCの値が所定時間C0を経過したか否かを判定する。カウンタCの値が所定時間C0を経過していない場合には、S30で同期整流を行う。
【0069】
S50でカウンタCの値が所定時間C0を経過している場合には、S60に移行する。S60に移行すると、CPU21は、非同期整流にて、第1トランジスタQ1のみをPWM駆動した後、S70で、カウンタCの値を0にリセットした後、一旦このフローチャートを終了する。
【0070】
非同期整流について説明する。非同期整流は、昇圧回路100の熱発生抑制モードに相当する。
非同期整流では、第2トランジスタQ2を常時オフとし、第1トランジスタQ1のみを前記デューティ比駆動信号にてPWM駆動する。この非同期整流の場合、コンデンサC2が充電されて、電圧印加点P2の電圧が目標出力電圧VBPIG*に達していると、実際には、第1トランジスタQ1のデューティ比(オンデューティ)は0に近いものとなる。
【0071】
この理由は、モータ6が低負荷であるため、コンデンサC2からのモータ6に供給される放電電流が少なく、特に無負荷の場合には、放電電流が流れることはない。
【0072】
そして、このような状態のもと、図5に示すように、フィードバック制御を行っているため、一旦、電圧印加点P2の電圧が目標出力電圧VBPIG*に達してしまうと、昇圧のためのデューティ比(オンデューティ)が0に近くなるためである。なお、デューティ比(オンデューティ)が0に近くなるとは、コンデンサC2には漏れ電流が生じて、実際には、少しずつ電荷が抜け、その分に見合うだけのフィードバック制御が行われて完全にデューティ比が0となることはないためである。
【0073】
なお、モータ6の力行時において、同期整流方式だけで、第1トランジスタQ1及び第2トランジスタQ2をオンオフ駆動すると、モータ6が低負荷の場合、モータ6が駆動されず、コンデンサC2の放電電流が消費されない。すなわち、この状態で、コンデンサC2に充電された電荷は、第2トランジスタQ2がオンされると、コイルLを介してバッテリBに返してしまうことになる。このとき、第2トランジスタQ2のオンオフによるスイッチングロスと、コイルLの発熱が生ずる。このように、第2トランジスタQ2のスイッチングロスの発生及びコイルLの発熱により、昇圧回路100が発熱してしまい、大変効率が悪くなる。
【0074】
しかし、本実施形態のように、モータ6が低負荷時、非同期整流で、第2トランジスタQ2を全オフし、かつ、第1トランジスタQ1をPWM駆動すると、第2トランジスタQ2のオンオフによるスイッチングロスが解消されるとともに、コイルLへは、コンデンサC2から電荷がコイルLに流れることがない。このため、第2トランジスタQ2のスイッチングロス及びコイルLの発熱がなくなり、昇圧回路100の温度上昇を抑制することができる。
【0075】
なお、モータ6の力行時において、非同期整流だけで、第1トランジスタQ1のみをPWM駆動でオンオフ駆動する場合、第2トランジスタQ2の寄生ダイオードD2を介して電圧印加点P2側へ電流を供給する形になる。この場合、モータ6の高負荷時においては、電圧印加点P2側への電流値が大きくなり、第2トランジスタQ2(寄生ダイオードD2)での損失(発熱)が大きくなり、好ましくない。
【0076】
なお、モータ6が回生状態に入ったときには、同期整流方式でCPU21は第1トランジスタQ1、第2トランジスタQ2をPWM駆動する。このとき、モータ6からの回生電流により出力電圧VBPIGが上昇するが、第2トランジスタQ2がデューティ制御によりオン作動している。このため、第2トランジスタQ2を介してバッテリBに回生電流が流れて吸収される。
【0077】
第1実施形態によれば、以下のような特徴がある。
(1) 第1実施形態の電動パワーステアリング装置は、q軸指令電流Iq*(電動機制御値)に基づいてモータ6(電動機)を駆動するモータ駆動装置35(電動機駆動手段)を備えている。
【0078】
又、電動パワーステアリング装置はバッテリB(直流電源)とモータ駆動装置35間に設けられ、バッテリ電圧(電源電圧)を昇圧する昇圧回路100(昇圧手段)と、デューティ比駆動信号(PWM駆動信号)を生成出力するCPU21(昇圧制御手段)を備えている。
【0079】
又、昇圧回路100は、コイルL(昇圧用コイル)、第2トランジスタQ2(第2スイッチング素子)、第1トランジスタQ1(第1スイッチング素子)、コンデンサC2(昇圧コンデンサ)とを備えている。そして、昇圧回路100は第1トランジスタQ1をPWM駆動信号によりオン、オフすることにより、バッテリBから昇圧用コイルに供給される電流を制御し、コンデンサC2に昇圧電圧を充電するようにした。
【0080】
又、CPU21(負荷状態判定手段、昇圧制御手段)は、モータ6の負荷状態を判定し、モータ6が、高負荷のときは、第1トランジスタQ1、第2トランジスタQ2を同期整流した。又、モータ6が、低負荷のときは、低負荷状態が所定時間C0継続したときに、第1トランジスタQ1のみをPWM制御して非同期整流した。
【0081】
この結果、ステアリングホイールを左右に繰り返し、操舵した場合、ステアリングホイール1を切返す瞬間にもモータ6の一瞬停止し、CPU21は低負荷であると判定する。しかし、低負荷状態が所定時間C0継続しないと、非同期整流に移行しないため、すなわち、所定時間C0内は同期整流となるため、非同期整流・同期整流を、繰り返すことはない。このため、操舵フィーリングが悪化することはない。
【0082】
又、モータ6が低負荷の場合、例えば、走行上、最も多い直線走行では、非同期整流によるPWM駆動を行うため、昇圧回路100の発熱を抑制することができる。
【0083】
この結果、モータ6の低負荷時においては、高負荷時に比して昇圧回路100の発熱の抑制ができる。
(2) 第1実施形態では、操舵トルクτを検出するトルクセンサ4(操舵トルク検出手段)を備えた。そして、CPU21(負荷状態判定手段)は、トルクセンサ4が検出した操舵トルクτが閾値τ0以下のときは、モータ6の負荷状態が低負荷であると判定し、操舵トルクτが閾値τ0を越えたときはモータ6の負荷状態が高負荷であると判定するようにした。
【0084】
この結果、操舵トルクτと閾値τ0とにより、モータ6が低負荷か高負荷の判定を容易にできる。
(第2実施形態)
次に、第2実施形態を図8を参照して説明する。
【0085】
第1実施形態では、モータ6の負荷状態を判定するパラメータとして、操舵トルクτとしたが、第2実施形態ではモータ6の負荷状態を判定するパラメータとして、モータ6のモータ回転数nを使用しているところが異なる。
【0086】
すなわち、本実施形態では、回転角センサ30は、モータ6の回転位置を検出する回転位置センサを兼用し、CPU21は、昇圧制御手段、負荷状態判定手段、及び電動機回転数推定手段に相当する。
【0087】
図8はCPU21が実行する力行時に実行される制御プログラムのフローチャートであり、デューティ比αが「+」のときに所定の制御周期で実行される。 第2実施形態では、第1実施形態のS10,S20の代わりにそれぞれS10A,S20Aが実行される。
【0088】
S10Aでは、CPU21は、回転角センサ30からの検出信号に基づいて、公知の演算式を使用してモータ回転数nを算出する。
S20Aでは、モータ回転数nと予めROM22に格納した回転数閾値n0との大小関係、すなわち、モータ6が低負荷状態か、或いは高負荷状態かを判定する。モータ回転数nが回転数閾値n0以下の場合には、モータ6が低負荷であるとして、S40に移行し、モータ回転数nが回転数閾値n0よりも大きい場合には、モータ6が高負荷であるとして、S30に移行する。
【0089】
第2実施形態では第1実施形態の(1)の他、以下のような特徴がある。
(1) 第2実施形態では、CPU21はモータ6の回転数を推定する電動機回転数推定手段としている。そして、CPU21(負荷状態判定手段)は、推定したモータ6の回転数(モータ回転数n)が回転数閾値n0以下のときは、モータ6の負荷状態が低負荷であると判定し、モータ回転数nが回転数閾値n0を越えるときは、モータ6の負荷状態が高負荷であると判定するようにした。
【0090】
この結果、モータ回転数nと回転数閾値n0とにより、モータ6が低負荷か高負荷の判定を容易にできる。
第2実施形態の構成を下記のように変更してもよい。
【0091】
(A) 第2実施形態では、ブラシレスモータを使用したが、ブラシレスモータの代わりにブラシ付モータ(以下、この項において、単にモータという)に変更してもよい。この場合においても、図8のフローチャートを実行するものとする。
【0092】
S10Aにおいては、下記のようにして、モータ回転数nを演算(推定)する。なお、モータのモータ電流を検出するために、モータにはモータ電流検出回路(図示しない)及びモータ端子間電圧を検出するためのモータ端子電圧検出回路(図示しない)が設けられている。
【0093】
CPU21は、前記モータのモータ回転数nを算出するため、まず、前記モータ電流検出回路(図示しない)によって検出されるモータ電流の平均値(モータ電流平均値Ia)と、モータ端子電圧検出回路によって検出される端子間電圧の平均値(端子間電圧平均値Va)とを求める。求めたモータ電流平均値Ia及び端子間電圧平均値Vaから、式(1)に従ってモータの内部抵抗の瞬時値(モータ内部抵抗瞬時値R)を算出する。
【0094】
R=Va/Ia …(1)
続いて、モータ内部抵抗瞬時値Rを時間積分してモータの内部抵抗値Riを求め、この内部抵抗値Ri、モータ電流平均値Iaと端子間電圧平均値Vaに基づいて式(2)を使用してモータの逆起電圧Vcを求める。
【0095】
Vc=Va−Ia・Ri …(2)
続いて、(3)式を使用して、逆起電圧Vcに、逆起電圧Vcに対する回転数の比であるモータ発電定数Kを乗算し、モータ回転数nを算出する。
【0096】
モータ回転数nはモータの逆起電圧Vcの符号に対応した符号を有する。
なお、モータ回転数nにはモータの右方向回転に対しては正の値をとり、モータの左方向回転に対しては負の値をとる。すなわち、モータ回転数nは、モータの回転方向成分を含む回転速度である。
【0097】
n=K・Vc … (3)
従って、この変形例では、S20Aでは、|n|>n0にて、大小関係を判定する。
【0098】
他の構成は、第2実施形態と同様である。
CPU21は、昇圧制御手段、負荷状態判定手段、及び電動機回転数推定手段に相当する。
【0099】
(B) 又、ステアリングホイール1(ハンドル)の回転数を検出するハンドル回転数センサを設け、このハンドル回転数センサが検出したハンドル回転数に基づいて、CPU21はモータ回転数nを算出(推定)するようにしてもよい。ハンドル回転数とモータ回転数nとは比例関係にあるため、これでもよい。
【0100】
この場合においても、CPU21は、昇圧制御手段、負荷状態判定手段、及び電動機回転数推定手段に相当する。
(第3実施形態)
次に、第3実施形態を図9を参照して説明する。
【0101】
第1実施形態では、モータ6の負荷状態を判定するパラメータとして、操舵トルクτとしたが、第3実施形態ではモータ6の負荷状態を判定するパラメータとして、アシスト指令電流、すなわちq軸指令電流Iq*(電動機制御値)を使用しているところが異なる。
【0102】
すなわち、本実施形態においても、CPU21は、昇圧制御手段、負荷状態判定手段に相当する。
図9はCPU21が実行する力行時に実行される制御プログラムのフローチャートであり、デューティ比αが「+」のときに所定の制御周期で実行される。
【0103】
第3実施形態では、第1実施形態のS10,S20の代わりにそれぞれS10B,S20Bが実行される。
S10Bでは、CPU21は、q軸指令電流Iq*(電動機制御値)を読込む。
【0104】
S20Bでは、q軸指令電流Iq*と、予めROM22に格納した指令値閾値Iq*sとの大小関係、すなわち、モータ6が低負荷状態か、或いは高負荷状態かを判定する。
【0105】
q軸指令電流Iq*が、それぞれ指令値閾値Iq*s以下の場合には、モータ6が低負荷であるとして、S40に移行し、q軸指令電流Iq*が、それぞれ指令値閾値Iq*sよりも大きい場合には、モータ6が高負荷であるとして、S30に移行する。
【0106】
第3実施形態では第1実施形態の(1)の他、以下のような特徴がある。
(1) 第3実施形態では、CPU21(負荷状態判定手段)は、q軸指令電流Iq*(電動機制御値)に基づいて、モータ6の負荷状態が低負荷か高負荷であると判定するようにした。
【0107】
すなわち、q軸指令電流Iq*と、予めROM22に格納した指令値閾値Iq*sとの大小関係により、モータ6が低負荷状態か、或いは高負荷状態かを判定するようにした。
【0108】
この結果、q軸指令電流Iq*と、予めROM22に格納した指令値閾値Iq*sとにより、モータ6が低負荷か高負荷の判定を容易にできる。
第3実施形態の構成を下記のように変更してもよい。
○ 第3実施形態では、q軸指令電流Iq*(電動機制御値)に基づいて、モータ6の負荷状態が低負荷か高負荷であると判定するようにした。これに代えて、q軸検出電流Iqと、予めROM22に格納した閾値との大小関係に基づいてモータ6の負荷を判定するようにしてもよい。
【0109】
すなわち、CPU21は、閾値よりもq軸検出電流Iqが越えていれば、モータ6が高負荷状態であると判定し、q軸検出電流Iqが閾値以下であれば、モータ6が低負荷状態であると判定するようにする。
【0110】
電流センサ71,72はモータ6に流れる実電流を検出する実電流検出手段に相当する。
前記q軸検出電流Iqは、モータ6に流れる実電流の検出値に相当する。
【0111】
この場合、CPU21は昇圧制御手段、負荷状態判定手段に相当する。
(第4実施形態)
次に第4実施形態を図10を参照して説明する。
【0112】
第4実施形態は、第1実施形態の構成中、フローチャートにおいて、S30、S60の代わりに、S30A、S60Aが実行されるところが異なり、他の構成は同一となっている。
【0113】
S30Aでは、操舵トルクτが閾値τ0よりも大きいと、モータ6が高負荷であると判定されているため、第1トランジスタQ1,第2トランジスタQ2をPWM駆動信号のキャリア周波数を高周波数で同期整流する。
【0114】
又、S60Aでは、操舵トルクτが閾値τ0以下であると、モータ6が低負荷であると判定されているため、PWM駆動信号のキャリア周波数を低周波数にして第1トランジスタQ1のみを非同期整流する。
【0115】
この結果、第4実施形態では、モータ6が低負荷の場合、PWM駆動信号のキャリア周波数を低周波数にしているため、スイッチングロスが少なくなり、スイッチングロスによるトランジスタの発熱が少なくなり、昇圧回路100の発熱を抑制できる。
【0116】
一方、S30Aでは、モータ6が高負荷の場合、第1トランジスタQ1,第2トランジスタQ2を高周波数で同期整流しているため、各トランジスタのオンオフ時のリップル電圧を小さくできる。
【0117】
従って、高周波数で両トランジスタを同期整流すると、モータ6は高負荷状態、すなわち、操舵トルクτが出ている状態であるため、リップル電圧が抑制されているほど、操舵フィーリングの悪化を防止できる。
【0118】
なお、モータ6が低負荷の場合は、特に、無負荷の場合は、モータ6は電力消費がないため、PWM駆動信号のキャリア周期を長くし(低周波数)て、両トランジスタを同期整流している。すなわち、この場合、操舵トルクτが出ていない状態(操舵していない状態)であり、このため、操舵フィーリングに影響が出ることはない。
【0119】
なお、CPU21は、昇圧制御手段、負荷状態判定手段に相当する。
従って、第4実施形態では、第1実施形態の(1)の効果の他、下記の特徴がある。
【0120】
(1) 第4実施形態では、CPU21(昇圧制御手段)は、モータ6が高負荷のときは、PWM駆動信号のキャリア周波数を高周波数にして第1トランジスタQ1,第2トランジスタQ2の両トランジスタ(両スイッチング素子)を同期整流するようにした。又、CPU21は、モータ6が低負荷のときは、低負荷状態が所定時間継続したときに、PWM駆動信号のキャリア周波数を低周波数にして第1トランジスタQ1,第2トランジスタQ2の両トランジスタを同期整流するようにした。
【0121】
この結果、低周期で非同期整流すると、スイッチングロスによるトランジスタの発熱が少なくなり、昇圧回路100の発熱を抑制できる。
又、モータ6は高負荷状態では、PWM駆動信号のキャリア周波数を高周波数で両トランジスタを同期整流しているため、リップル電圧が抑制され、操舵フィーリングの悪化を防止できる。
【0122】
なお、第4実施形態を、下記のように変更してもよい。
(A) 第4実施形態のフローチャートのうち、S10、S20を第2実施形態のS10A、S20Aにそれぞれ変更すること。その結果、第2実施形態の上記(1)の効果を奏する。
【0123】
(B) 第4実施形態のフローチャートのうち、S10、S20を第3実施形態のS10B、S20Bにそれぞれ変更すること。その結果、第3実施形態の上記(1)の効果を奏する。
【0124】
なお、本発明の実施形態は以下のように変更してもよい。
○ 前記各実施形態では、操舵トルクτと、車速Vとを使用した実施形態に代えて、操舵トルクτのみで、電動機制御値を決定するようにしてもよい。
【0125】
【発明の効果】
以上詳述したように、請求項1乃至請求項5の発明は、ステアリングの切返し操舵による操舵フィーリングの悪化を防止することができ、又、通常走行上、最も多い直線走行では、非同期整流によるPWM駆動にて行うため、昇圧回路の発熱を抑制できる効果を奏する。
【図面の簡単な説明】
【図1】本発明の第1実施形態に具体化した電動パワーステアリング装置の概略図。
【図2】同じく電動パワーステアリング装置の制御ブロックダイヤグラム。
【図3】同じくCPU21の制御ブロック図。
【図4】同じく昇圧回路の電気回路図。
【図5】同じく昇圧時の制御装置の制御ブロックダイヤグラム。
【図6】(a)は同期整流方式の場合における両トランジスタのPWM駆動信号の波形図、(b)は、非同期整流方式の場合における両トランジスタのPWM駆動信号等の波形図。
【図7】第1実施形態のCPU21が実行する制御プログラムのフローチャート。
【図8】第2実施形態のCPU21が実行する制御プログラムのフローチャート。
【図9】第3実施形態のCPU21が実行する制御プログラムのフローチャート。
【図10】第4実施形態のCPU21が実行する制御プログラムのフローチャート。
【図11】従来の電動パワーステアリング装置の昇圧回路の電気回路図。
【図12】同じくトランジスタのPWM駆動信号の波形図。
【符号の説明】
4…トルクセンサ(操舵トルク検出手段)
6…モータ(電動機)
20…制御装置
21…CPU(昇圧制御手段、負荷状態判定手段、及び電動機回転数推定手段)
35…モータ駆動装置(電動機駆動手段)
100…昇圧回路(昇圧手段)
B…バッテリ(直流電源)
L…コイル(昇圧用コイル)
C2…コンデンサ(昇圧用コンデンサ)
Q1…第1トランジスタ(第1スイッチング素子)
Q2…第2トランジスタ(第2スイッチング素子)
Claims (5)
- 電動機制御値に基づいて電動機を駆動する電動機駆動手段と、直流電源と前記電動機駆動手段間に設けられ、電源電圧を昇圧する昇圧手段と、PWM駆動信号を生成出力する昇圧制御手段とを備え、前記昇圧手段は、直流電源の出力端子に接続された昇圧用コイルと、同昇圧用コイルの出力端子に対して共に接続された第1スイッチング素子と第2スイッチング素子と、前記第2スイッチング素子の出力端子に接続された昇圧用コンデンサとを備え、前記両スイッチング素子の内少なくとも前記第1スイッチング素子を前記PWM駆動することにより、前記直流電源から昇圧用コイルに供給される電流を制御し、前記昇圧用コンデンサに昇圧電圧を充電する電動パワーステアリング装置において、
電動機の負荷状態を判定する負荷状態判定手段を設け、
前記昇圧制御手段は、前記負荷状態判定手段の判定結果により電動機が高負荷のときは、前記両スイッチング素子を同期整流し、低負荷のときは、低負荷状態が所定時間継続したときに第1スイッチング素子のみをPWM制御して非同期整流することを特徴とする電動パワーステアリング装置。 - 前記昇圧制御手段は、高負荷のときは、PWM駆動信号のキャリア周波数を高周波数にして前記両スイッチング素子を同期整流し、低負荷のときは、低負荷状態が所定時間継続したときに前記両スイッチング素子の内、第1スイッチング素子のみを、PWM駆動信号のキャリア周波数を低周波数にして非同期整流することを特徴とする請求項1に記載の電動パワーステアリング装置。
- 操舵トルクを検出する操舵トルク検出手段を備え、
前記負荷状態判定手段は、前記操舵トルク検出手段が検出した操舵トルクが小のときは、電動機の負荷状態が低負荷であると判定し、操舵トルクが大のときは電動機の負荷状態が高負荷であると判定することを特徴とする請求項1及び請求項2に記載の電動パワーステアリング装置。 - 前記電動機の回転数を推定する電動機回転数推定手段を備え、
前記負荷状態判定手段は、前記電動機回転数推定手段が推定した回転数が小のときは、電動機の負荷状態が低負荷であると判定し、回転数が大のときは、電動機の負荷状態が高負荷であると判定することを特徴とする請求項1及び請求項2に記載の電動パワーステアリング装置。 - 前記負荷状態判定手段は、前記電動機制御値、又は、電動機に流れる実電流の検出値に基づいて電動機の負荷状態を判定することを特徴とする請求項1及び請求項2に記載の電動パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002122875A JP3777403B2 (ja) | 2002-04-24 | 2002-04-24 | 電動パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002122875A JP3777403B2 (ja) | 2002-04-24 | 2002-04-24 | 電動パワーステアリング装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003312517A JP2003312517A (ja) | 2003-11-06 |
| JP2003312517A5 JP2003312517A5 (ja) | 2005-01-06 |
| JP3777403B2 true JP3777403B2 (ja) | 2006-05-24 |
Family
ID=29538365
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002122875A Expired - Fee Related JP3777403B2 (ja) | 2002-04-24 | 2002-04-24 | 電動パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3777403B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4501599B2 (ja) * | 2004-09-01 | 2010-07-14 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4333646B2 (ja) * | 2005-07-06 | 2009-09-16 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP4692244B2 (ja) * | 2005-11-25 | 2011-06-01 | トヨタ自動車株式会社 | 電力供給装置 |
| JP5286717B2 (ja) * | 2007-09-04 | 2013-09-11 | 株式会社リコー | 昇圧型dc/dcコンバータ |
| JP6839896B2 (ja) * | 2017-07-07 | 2021-03-10 | 日立Astemo株式会社 | モータ制御装置および電動車両 |
| JP2019034655A (ja) * | 2017-08-16 | 2019-03-07 | 株式会社ジェイテクト | 電源システム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0753508B2 (ja) * | 1987-08-12 | 1995-06-07 | 株式会社日立製作所 | 電動パワ−ステアリング制御システム |
| JP3205651B2 (ja) * | 1993-09-07 | 2001-09-04 | ティーアールダブリュ オートモーティブ ジャパン株式会社 | 電源電圧制御装置を備えた電動パワーステアリング装置 |
| JPH08127352A (ja) * | 1994-10-31 | 1996-05-21 | Jidosha Kiki Co Ltd | 車両用パワーステアリングシステム |
| JPH08127350A (ja) * | 1994-10-31 | 1996-05-21 | Jidosha Kiki Co Ltd | 車両用パワーステアリングシステム |
| JP3293435B2 (ja) * | 1995-11-20 | 2002-06-17 | セイコーエプソン株式会社 | モータ駆動装置 |
| JPH10304690A (ja) * | 1997-04-25 | 1998-11-13 | Nippon Electric Ind Co Ltd | 直流電源電圧を可変としたスイッチド・リラクタンスモータの運転制御回路 |
| JPH1189270A (ja) * | 1997-09-08 | 1999-03-30 | Kansai Electric Power Co Inc:The | モータの駆動装置及び電気自動車 |
| JPH11113283A (ja) * | 1997-09-30 | 1999-04-23 | Toshiba Corp | モータの駆動装置 |
| JPH11278289A (ja) * | 1998-03-27 | 1999-10-12 | Kayaba Ind Co Ltd | 電動パワーステアリング装置 |
| JP3675692B2 (ja) * | 2000-03-17 | 2005-07-27 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| JP3705166B2 (ja) * | 2001-07-10 | 2005-10-12 | 三菱電機株式会社 | ステアリング制御装置 |
| JP3865224B2 (ja) * | 2002-03-15 | 2007-01-10 | 株式会社デンソー | 電動パワーステアリング装置 |
-
2002
- 2002-04-24 JP JP2002122875A patent/JP3777403B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003312517A (ja) | 2003-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1293413B1 (en) | Motor-driven power steering apparatus | |
| EP1961643B1 (en) | Motor controller and electric power steering apparatus | |
| EP2110941B1 (en) | Motor control apparatus and electric power steering system | |
| JP4969188B2 (ja) | 電動パワーステアリング制御装置 | |
| JP4350077B2 (ja) | インバータ装置、モータ装置、伝達比可変装置、および操舵補助装置 | |
| WO2009087991A1 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| JP2004040883A (ja) | 電動パワーステアリング装置 | |
| JP4737391B2 (ja) | モータ駆動制御方法及びモータ駆動制御装置 | |
| JP5338969B2 (ja) | 電源状態診断方法及び装置 | |
| JP3777403B2 (ja) | 電動パワーステアリング装置 | |
| JP2003319699A (ja) | 電動パワーステアリング装置 | |
| JP2011218878A (ja) | 電動パワーステアリング装置 | |
| JP3798725B2 (ja) | 電動パワーステアリング装置 | |
| US8129935B2 (en) | Motor control device | |
| JP3783941B2 (ja) | モータ制御装置 | |
| JP3805714B2 (ja) | 電動パワーステアリング装置 | |
| JP3784746B2 (ja) | 電動パワーステアリング制御装置及び電動パワーステアリング制御装置の電動機電流演算方法 | |
| JP7276244B2 (ja) | 多相回転機の制御装置 | |
| JP4245000B2 (ja) | 電動パワーステアリング装置 | |
| JP3795827B2 (ja) | 電動パワーステアリング装置 | |
| JP2011230531A (ja) | モータ制御装置 | |
| JP5444697B2 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| JP7473125B2 (ja) | 電動モータ用制御装置、ステアリング装置 | |
| JP2009001217A (ja) | 電動パワーステアリング装置 | |
| JP2020092559A (ja) | ステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20051214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060125 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20060125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3777403 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090310 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100310 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110310 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120310 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120310 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130310 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140310 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |