以下、実施形態について図面に基づき説明を行う。なお、以下の実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付しており、同一符号の部分についてはその説明を援用する。本実施形態に係る走行支援装置は、車両(自車両)に搭載され、自車両の進行方向前方等の周囲に存在する他車両の情報に基づき、走行支援を実行する。
図1は、他車両との衝突を回避すべく、若しくは衝突被害を軽減すべく制御を行うPCSシステム100(Pre−Crash−Safety−system)を示している。PCSシステム100は、車両に搭載される車両システムの一例である。PCSシステム100は、自車両の周囲に存在する物体(他車両等)を検出し、検出した物体と自車両とが衝突する可能性がある場合に、物体に対する走行支援制御として、自車両の衝突の回避動作、又は衝突の緩和動作等を実行する。
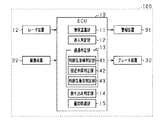
図1に示すPCSシステム100は、レーダ装置21と、撮像装置22と、車速センサ23と、ECU10と、警報装置31と、ブレーキ装置32とを備えている。図1等に示す実施形態において、レーダ装置21及び撮像装置22が、物体検出装置として機能する。ECU10は、自車両の周囲における物体を検出する物体検出装置が搭載される車両に適用され、物体検出装置の検出情報に基づいて、自車両の周囲を走行する他車両と自車両との衝突回避制御を実行可能な走行支援装置として機能する。
レーダ装置21は、ミリ波やレーザ等の指向性のある電磁波(探査波)を利用して自車両50の前方の物体を検出するものであり、自車両50の前部においてその光軸が自車両50の前方を向くように取り付けられている。レーダ装置21は、所定時間ごとに自車両50の前方に向かって所定範囲で広がる領域をレーダ信号で走査するとともに、前方物体の表面で反射された電磁波を受信することで前方物体の相対位置、前方物体との相対速度等を物体情報として取得する。なお、相対位置は、自車両50を原点とした場合に、自車両50の車幅方向をX軸とし、自車両50の進行方向をY軸とする相対座標上の位置として取得される。相対位置において、車幅方向(X軸)の成分が自車両50に対する物体の横位置を示し、自車両50の進行方向(Y軸)の成分が前方物体との距離を示す。車幅方向は自車両50の進行方向に交差(直交)する方向であるといえる。取得された物体情報(検出情報)は、ECU10に入力される。
撮像装置22は、車載カメラであって、例えばCCDカメラ、CMOSイメージセンサ、近赤外線カメラ等を用いて構成されている。撮像装置22は、自車両50の車幅方向中央の所定高さ(例えば、フロントガラス上端付近)に取り付けられ、自車前方へ向けて所定角度範囲で広がる領域を俯瞰視点から撮像する。撮像された撮像画像(検出情報)は、所定周期毎にECU10に入力される。なお、撮像装置22は、単眼カメラであってもよく、ステレオカメラであってもよい。
車速センサ23は、車輪の回転速度に基づき自車両50の走行速度を検出する。車速センサ23による検出結果は、ECU10に入力される。
警報装置31は、ECU10からの制御指令により、ドライバに対して自車両50の前方に物体が存在することを警報する(ドライバへの注意を促す)。警報装置31は、例えば、車室内に設けられたスピーカや、画像を表示する表示部により構成されている。
ブレーキ装置32は、自車両50を制動する制動装置である。ブレーキ装置32は、前方物体に衝突する可能性が高まった場合に作動する。具体的には、ドライバによるブレーキ操作に対する制動力をより強くしたり(ブレーキアシスト機能)、ドライバによりブレーキ操作が行われてなければ自動制動を行ったりする(自動ブレーキ機能)。
ECU10は、CPU、各種メモリ(ROM、RAM)を備える周知のマイクロコンピュータとして構成されており、メモリ内の演算プログラムや制御データを参照して、自車両50における制御を実行する。ECU10は、レーダ装置21から出力される情報や、撮像装置22から出力される撮像画像に基づいて物体(他車両等)を検出し、その検出結果に基づいて、警報装置31やブレーキ装置32を制御対象とする走行支援制御(PCS)を実行する。
ECU10は、物体認識部11と、進入判定部12と、通過判定部13と、割り込み判定部14と、衝突回避部15と、を備えている。
物体認識部11は、レーダ装置21および撮像装置22から取得された検出情報に基づいて、物体認識を行う。具体的には、撮像装置22から撮像画像(画像データ)を取得し、その撮像画像と予め用意された物体識別用の辞書情報とに基づいて、自車前方に存在する物体の種類を判定する。物体識別用の辞書情報は、例えば自動車、二輪車、歩行者、路上障害物といった物体の種類に応じて個別に用意され、メモリに予め記憶されている。自動車の辞書情報としては、少なくとも前部パターンと後部パターンとの辞書情報が用意されている。さらには、自動車の前部又は後部のパターンとして、例えば大型車、普通車、軽自動車、自動二輪車、自転車等を含む軽車両、等の複数の車種ごとに辞書情報が用意されていることが好ましい。物体認識部11は、撮像画像と辞書情報とをパターンマッチングにより照合することで、物体の種類を判定する。また、物体認識部11は、撮像画像と辞書情報とに基づいて、自車両の進行方向およびこれに略直交する横方向の物体の位置情報(物体の横幅等を含む)を取得する。
また、物体認識部11は、レーダ装置21により検出された他車両の情報(方位、位置及び速度)に基づき、自車両の進行方向に対して交差(例えば、直交)する交差方向における他車両の横位置及び横速度を算出する。他車両の情報(横位置や横速度等)は、履歴としてECU10のRAM等に記憶されており、この履歴に基づき、自車両の進行方向に対して交差(例えば、直交)する交差方向における他車両の横加速度を算出する。例えば、ECU10は、履歴を参照して、他車両の横速度の変化を特定し、当該横速度の変化に基づき、他車両の横加速度を算出する。
進入判定部12は、自車両が走行する自車線の隣接車線のうちの一方から、他車両が自車線に向けて進入する状況であるか否かを判定する。進入判定部12は、物体認識部11が認識した物体の種類と、その物体の位置情報および速度情報に基づいて、他車両が自車線に向けて進入する状況であるか否かを判定する。
具体的には、進入判定部12は、物体認識部11により得られた他車両の横位置及び横速度に基づき、他車両が、自車線の隣接車線から自車線へ移動を開始するか否かを判定する。すなわち、進入判定部12は、他車両の横位置及び横速度に基づき、自車両が走行する自車線と隣接する隣接車線において走行している他車両が自車線に向けて進入する(進入すると予測されることを含む)か否かを判定する。
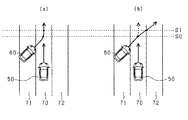
例えば、図2は、自車両50が走行する自車線70の左側の隣接車線71から、他車両60が自車線70に向けて進入を開始する状況を例示している。図2(a)に示す実線の矢印は、他車両60が左側の隣接車線71から自車線70の自車両50の前方に割り込む場合、すなわち、他車両60が自車線70を通過しないで、自車線70での走行を継続する場合の他車両60の動きを示している。図2(b)に示す実線の矢印は、他車両60が左側の隣接車線71から自車線70の自車両50の前方を通過して、右側の隣接車線72に移動する場合の他車両60を示しており、破線の矢印は、図2(a)に示す実線を比較のために示している。具体的には、図2(b)は、他車両60がダブルレーンチェンジを実行する場合を示している。進入判定部12は、左側の隣接車線71に存在する他車両60が自車線70側に移動し、かつ、他車両60の横速度(自車両50の進行方向に略直交する横方向の速度)が所定の速度閾値V1以上である場合に、他車両60が自車線70に向けて進入する状況であると判定する。図2(a)(b)に示すいずれの場合も、他車両60の位置および横速度は同様であり、他車両60が自車線70に向けて進入する状況として判定される。なお、右側の隣接車線72の走行方向は、自車線70と同じ方向であってもよいし、対向していてもよい。例えば、他車両60がUターンを目的として車線変更を実行する場合に、他車両60が対向車線としての隣接車線72に車線変更する状況となり得る。
通過判定部13は、進入判定部12により他車両が進入する状況であると判定された場合に、他車両が自車線を通過可能であるか否かを判定する。好ましくは、他車両が自車線を超えて移動する場合の移動先の状況に基づいて、他車両が自車線を通過可能であるか否かを判定する。具体的には、通過判定部13は、他車両の位置および速度から、他車両が自車線を超えて移動する場合の移動先を予測する。そして、レーダ装置21および撮像装置22から取得された検出情報等に基づいて、予測した移動先の状況を認識して、その移動先に他車両が自車線を通過して移動できるか否かを判定する。
例えば、図2に示すように、左側の隣接車線71から他車両60が自車線70に進入する場合には、通過判定部13は、移動先である右側の隣接車線72に関する情報に基づいて、他車両60が右側の隣接車線72(移動先)に移動可能であるか否かを判断する。そして、通過判定部13は、他車両60が右側の隣接車線72に移動可能であると判断される場合に、他車両60は図2(b)に示すように自車線70を通過可能であると判定することができる。
通過判定部13は、移動先と予測される位置に自車線の隣接車線が存在するか否かに関わらず、移動先として予測した上で、他車両が移動先に移動可能か否かを判断するように構成されていてもよい。仮に、右側の隣接車線72が存在しない場合であっても、通過判定部13は、右側の隣接車線72が存在する場合と同様に移動先を予測した後で、他車両60が移動先に移動できないとの判断に基づいて、他車両60が自車線70を通過できないと判定してもよい。
または、通過判定部13は、他車両60が自車線70を超えて到達すると予測される位置に自車線70の隣接車線が存在しない場合には、直ちに、他車両60が自車線70を通過できないと判定するように構成されていてもよい。
通過判定部13は、移動先領域判定部41と、接近車両判定部42と、移動先衝突判定部43とを備え、各判定部41〜43の判定に基づいて、他車両が自車線を通過可能であるか否かを判定するように構成されていてもよい。通過判定部13は、他車両が自車線を通過できるか否かを判定するに際して、移動先領域判定部41、接近車両判定部42、および移動先衝突判定部43のうち、全ての判定結果を用いてもよいし、一部の判定結果を用いてもよい。
移動先領域判定部41は、他車両が自車線を超えて移動する場合の移動先と予測される移動先領域が確保されているか否かを判定する。移動先領域は、他車両が自車線を通過した場合に到達すると予測される位置に設定される。移動先領域は、通過判定部13は、移動先領域判定部41により、移動先領域が確保できないと判定された場合に、他車両が自車線を通過できないと判定するように構成されていてもよい。
接近車両判定部42は、移動先領域に向かって移動する接近車両が存在するか否かを判定する。移動先衝突判定部43は、移動先領域において他車両と接近車両とが衝突するか否かを判定する。
通過判定部13は、移動先領域判定部41により、移動先領域が確保できると判定され、かつ、接近車両判定部42により、接近車両が存在しないと判定された場合に、他車両が自車線を通過できると判定するように構成されていてもよい。
また、通過判定部13は、移動先領域判定部41により、移動先領域が確保できると判定され、接近車両判定部42により、接近車両が存在すると判定され、かつ、移動先衝突判定部43は、移動先領域において他車両と接近車両とが衝突しないと判定された場合に、他車両が自車線を通過できると判定するように構成されていてもよい。一方で、通過判定部13は、移動先領域において他車両と接近車両とが衝突すると判定された場合には、他車両が自車線を通過できないと判定するように構成されていてもよい。
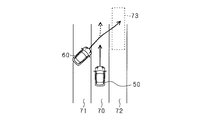
図3を用いて具体的に説明すると、他車両60が左側の隣接車線71から自車線70の自車両50の前方に進入すると判定された場合に、移動先領域判定部41は、右側の隣接車線72において、他車両60の移動先と予測される移動先領域73が確保されているか否かを判定する。具体的には、例えば、右側の隣接車線72に相当する領域が歩道や崖または堤防等となっている場合、自車線70と右側の隣接車線72との間に中央分離帯やガードレール等の構造物が存在する場合、右側の隣接車線72が車両の進入禁止エリアである場合、右側の隣接車線72に駐停車する車両等が存在する場合等に、移動先領域判定部41は、移動先領域73を確保できないと判定する。移動先領域73を確保できないとの判定があった場合には、通過判定部13は、他車両60が自車線70を通過できないと判定する。
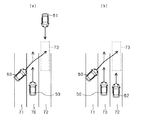
また、図4に示すように、接近車両判定部42は、物体認識部11によって、移動先領域73に前方から向かって移動する接近車両61が認識された場合や、移動先領域73に後方から向かって移動する接近車両62が認識された場合に、接近車両が存在すると判定する。移動先領域73を確保できると判定され、接近車両61,62が存在しないと判定された場合には、通過判定部13は、他車両60が自車線70を通過できると判定する。
また、移動先領域73を確保できると判定され、接近車両61,62が存在しないと判定された場合には、移動先衝突判定部43は、移動先領域73において他車両60と接近車両61,62とが衝突するか否かを判定する。例えば、他車両60と接近車両61,62とが衝突するまでの衝突予測時間(TTC:Time−to−collision)を算出し、衝突予測時間が所定の衝突判定閾値T1以下である場合に、衝突すると判定する。衝突予測時間は、他車両60と接近車両61,62との距離(車間距離)及び相対速度に基づいて、例えば、相対距離を相対速度で除算することにより、算出できる。移動先領域73において、他車両60と接近車両61,62とが衝突すると判定された場合には、通過判定部13は、他車両60が自車線70を通過できないと判定する。これに対して、移動先領域73において、他車両60と接近車両61,62とが衝突しないと判定された場合には、通過判定部13は、他車両60が自車線70を通過できると判定する。
割り込み判定部14は、他車両が自車線へ割り込むか否かを判定する。具体的には、割り込み判定部14は、他車両が、自車線以外の車線に移動するために一次的に自車線に進入したのではなく、自車線に走行を継続すると判断された場合に、その他車両が自車線に割り込むと判定する。割り込み判定部14は、他車両の状況に基づいて、他車両が自車線に割り込むか否かを判定することができる。具体的には、割り込み判定部14は、他車両の車体の向き、位置、走行速度、方向指示器のオンオフ等に基づいて、他車両が自車線に割り込むか否かを判定することができる。より具体的には、例えば、割り込み判定部14は、自車線内において、他車両の横方向の加速度が負側に増加した場合に、他車線が自車線に割り込むと判定することができる。
また、割り込み判定部14は、他車両が自車線への割り込みを完了した場合に、他車線が自車線に割り込むと判定するように構成されていてもよい。例えば、図2(a)(b)に示す他車両60がそれぞれ実線に沿って位置S1まで進んだ段階では、図2(a)に示す自車線70に割り込む他車両60と図2(b)に示す他車両60とは、共に自車線70に存在し、自車両50に対して、同じ車体の向きで、ほぼ同位置である。また、他車両60の速度(自車線の進行方向の速度および横方向の速度)も同程度である。このため、割り込み判定部14は、位置S1では、他車両60が自車線70に割り込みを完了していないと判定する。
これに対して、他車両60がそれぞれ実線矢印に沿って位置S0まで進むと、図2(a)に示す自車線70に割り込む他車両60の位置および車体の向きと、図2(b)に示す他車両60の位置および車体の向きとは、相違するものとなる。図2(a)においては、位置S0の他車両60は自車線70の自車両50の前方に存在し、車体の向きは自車両の進行方向となる。他車両60は、自車線70の進行方向に沿って走行しているため、割り込み判定部14は、他車両60が自車線70への割り込みを完了したと判定する。他方、図2(b)においては、位置S0の他車両60は自車線70と右側の隣接車線72との間となる位置で自車両50の右斜め前方に存在し、車体の向きは右斜め前方に向けられている。他車両60は、自車線70の進行方向に沿って走行する状況ではないため、割り込み判定部14は、他車両60が自車線70に割り込みを完了していないと判定する。
衝突回避部15は、他車両60と自車両50との衝突回避制御を実行する。ここにいう衝突回避制御は、衝突回避判定と、衝突回避判定結果に基づいて必要に応じて実行される自車両の衝突回避動作の指令との双方を含む。自車両の走行方向前方に衝突予測領域を設定する。そして、物体認識部11により認識された対象物体の位置情報に基づいて、衝突予測領域内に存在する対象物体に対して衝突判定を行って、衝突回避動作の指令を実行するか否かを決定する。衝突回避動作は、自車両の衝突を抑止または軽減するための動作であり、具体的には、運転者への警告、自車両の走行制御(自動操舵制御や自動ブレーキ制御)等を例示することができる。
図2を用いて具体的に説明すると、衝突回避部15は、他車両60が衝突予測領域内に存在する場合に、他車両60と自車両50との距離(車間距離)及び相対速度に基づいて(例えば、相対距離を相対速度で除算して)、他車両60と自車両50とが衝突するまでの衝突予測時間(TTC:Time−to−collision)を算出する。
そして、衝突回避部15は、衝突予測時間と、衝突回避制御を行う作動タイミングとを比較して、衝突回避動作の指令を行うか否かを決定する。作動タイミングは、警報装置31及びブレーキ装置32等の衝突回避動作を実行可能な各装置に対して、それぞれ設定される。
衝突回避部15は、衝突回避動作の指令を行うことを決定すると、警報装置31及びブレーキ装置32等の衝突回避動作を実行可能な各装置に対して、衝突回避動作を実行する指令信号を送信する。具体的には、衝突予測時間が警報装置31の作動タイミング以下となれば、スピーカ等を作動させてドライバへの警報を実行させる。また、衝突予測時間がブレーキ装置32の作動タイミング以下となれば、自動ブレーキを作動させる騒動制御等を実行させ、衝突速度を低減させる。
衝突回避部15は、通過判定部13により他車両が自車線を通過可能であると判定された場合には、割り込み判定部14により他車両が割り込むと判定されたことを条件として、他車両と自車両との衝突回避制御を実行する。図2を用いて具体的に説明すると、通過判定部13により他車両60が自車線70を通過すると判定された場合には、他車両60が位置S1まで到達し、割り込み判定部14により他車両60が割り込むと判定された場合に、衝突回避部15は、衝突回避制御を実行する。
これに対して、衝突回避部15は、通過判定部13により他車両が自車線を通過できないと判定された場合には、割り込み判定部14による判定に関わらず、他車両と自車両との衝突回避制御を実行する。例えば、衝突回避部15は、通過判定部13により他車両が自車線を通過できないと判定された場合には、割り込み判定部14による判定自体を行うことなく、衝突回避制御を実行するように構成されていてもよい。また、例えば、通過判定部13による判定結果が得られる以前に割り込み判定部14による判定処理が開始されていた場合には、衝突回避部15は、通過判定部13により他車両が自車線を通過できないと判定された時点で、直ちに、衝突回避制御を実行するように構成されていてもよい。衝突回避部15は、通過判定部13により他車両が自車線を通過できないと判定された場合には、割り込み判定部14の判定結果を待つことなく、または、割り込み判定を中断して、直ちに、衝突回避制御に係る処理に移行するようにしてもよい。
図2を用いて具体的に説明すると、通過判定部13により他車両60が自車線70を通過できないと判定された場合には、他車両60が位置S1に存在する場合であっても、衝突回避部15は、衝突回避制御を実行する。通過判定部13により、他車両60が自車線70を通過できないと判定した場合には、他車両60が自車線70に割り込むことが予測されるため、割り込み判定部14による割り込み判定結果を参照する必要がない。このため、他車両60が位置S0に到達することを待つことなく、位置S1に存在する段階で、衝突回避部15による衝突回避制御を実行できる。その結果、衝突回避判定を早く完了し、他車両60に対してより的確かつ迅速に衝突回避動作を実行させることが可能となる。
図5に、ECU10が実行する走行支援制御のフローチャートを示す。図3に示す処理は、所定の周期で繰り返し実行される。
ステップS101では、レーダ装置21および撮像装置22から取得された検出情報に基づいて、物体認識を行い、ステップS102に進む。
ステップS102では、自車両が走行する自車線の隣接車線のうちの一方から、他車両が自車線に向けて進入する状況であるか否かを判定する。自車線に進入する他車両、もしくは、自車線に進入することが予測される他車両が存在すると判定された場合には、ステップS103に進む。自車線に進入する他車両が存在しない場合には、処理を終了する。
ステップS103では、自車線に進入すると判定された他車両が、自車線を通過するか否かを判定する。この判定は、図6に示すフローチャートに従って実行される。
まず、ステップS201では、他車両が自車線を超えて移動すると予測される移動先領域を推定する。そして、移動先領域に他車両が移動できる空き領域が存在するか否かを判定する。ステップS103では、主に、移動先領域への他車両の移動を妨げる物理的な障壁が存在する場合に、移動先領域が存在しないと判定する。
例えば、図3に示すように、他車両60が左側の隣接車線71から自車線70の自車両50の前方に進入すると判定された場合に、右側の隣接車線72において、他車両60の移動先と予測される移動先領域73が確保されているか否かを判定する。そして、右側の隣接車線72に相当する領域が歩道や崖または堤防等となっている場合、自車線70と右側の隣接車線72との間に中央分離帯やガードレール等の構造物が存在する場合、右側の隣接車線72に駐停車する車両等が存在する場合等に、移動先領域73が存在しないと判定する。ステップS201において、移動先領域が存在すると判定された場合には、ステップS202に進む。ステップS201において、移動先領域が存在しないと判定された場合には、ステップS206に進み、他車両の通過は不可能であると判定してステップS104に戻る。
ステップS202では、移動先領域への進入が禁止されているか否かを判定する。ステップS202では、移動先領域が空き領域であるにも関わらず、交通規制等により、移動先領域への移動が禁止されている場合に、移動先領域への進入が禁止されていると判定する。例えば、図3に示す右側の隣接車線72が車両の進入禁止エリアである場合、移動先領域73は進入禁止であると判定する。ステップS202において、移動先領域が進入禁止でないと判定された場合には、ステップS203に進む。ステップS202において、移動先領域が進入禁止であると判定された場合には、ステップS206に進み、他車両の通過は不可能であると判定してステップS104に戻る。
ステップS203では、移動先領域に向かって移動する接近車両が存在するか否かを判定する。図4に示すように、移動先領域73に前方から向かって移動する接近車両61が認識された場合や、移動先領域73に後方から向かって移動する接近車両62が認識された場合に、接近車両が存在すると判定する。ステップS203において、移動先領域に向かって移動する接近車両が存在すると判定された場合には、ステップS204に進む。ステップS203において、移動先領域に向かって移動する接近車両が存在しないと判定された場合には、ステップS205に進み、他車両の通過は可能であると判定してステップS104に戻る。
ステップS204では、移動先領域において他車両と接近車両とが衝突するか否かを判定する。具体的には、図4に示す他車両60と接近車両61,62とが衝突するまでの衝突予測時間(TTC:Time−to−collision)を算出し、衝突予測時間が所定の衝突判定閾値T1以下である場合に、衝突すると判定する。ステップS204において、移動先領域において他車両と接近車両とが衝突しないと判定された場合には、ステップS205に進み、他車両の通過は可能であると判定してステップS104に戻る。ステップS204において、移動先領域において他車両と接近車両とが衝突すると判定された場合には、ステップS206に進み、他車両の通過は不可能であると判定してステップS104に戻る。
ステップS104では、他車両が自車線を通過可能と判定されたか否かを判断する。ステップS103で他車両が自車線を通過可能と判定された場合には、ステップS105に進む。通過不能と判定された場合には、ステップS105を実行しないで、そのままステップS106に進む。
ステップS105では、自車線に進入すると判定された他車両が、自車線への割り込みを完了したが否かを判定する。例えば、図2(a)のS1位置における他車両60のように、自車線70内で、その走行方向に沿って走行していることが確認された場合に、他車両60の自車線70への割り込みが完了したと判定される。他方、図2(a)(b)のS0位置における他車両60のように、他車両60が、自車線70の走行方向に沿って走行していることが確認できない場合には、他車両60の自車線70への割り込みが完了していないと判定される。同様に、図2(b)のS1位置における他車両60についても、自車線70への割り込みが完了していないと判定される。他車両の割り込みが完了したと判定された場合には、ステップS106に進む。他車両の割り込みが完了していないと判定された場合には、処理を終了する。
ステップS103〜S106に示すように、ECU10は、レーダ装置21や撮像装置22からの物体検出情報に基づいて、自車線に進入すると判定された他車両が自車線を通過可能であるか、通過不能であるかを判定する。そして、通過可能であると判定した場合には、ステップS105における他車両の自車線への割り込みが完了したと判定されたことを条件として、ステップS106における衝突回避判定処理を実行する。この場合、図2(a)に示すように、他車両60が、より自車両50に遠い位置S1に到達した時点で衝突回避判定が開始される。
他方、通過不能であると判定した場合には、ステップS105における他車両の自車線への割り込みが完了したか否かの判定処理を実行することなく、ステップS106における衝突回避判定処理を実行する。この場合、図2(b)に示すように、他車両60が、より自車両50に近い位置S0に到達した時点で衝突回避判定を開始することができる。ステップS105の処理を省略して、速やかにステップS106の衝突回避判定を実行できるため、衝突回避判定を早く完了し、より的確に衝突回避制御を実行することが可能となる。
ステップS106では、自車線に進入すると判定された他車両と、自車両との衝突判定を実行した後、ステップS107に進む。ステップS107では、ステップS106での判定結果に基づいて、衝突回避動作を実行するか否かを判断する。衝突回避動作を実行する場合には、ステップS108に進み、警報装置31やブレーキ装置32に対して、衝突回避のための指令信号が送信される。
なお、図5に示すフローチャートでは、ステップS105に示す割り込みを完了したか否かの判定処理は、ステップS103およびステップS104の処理の後に実行されるが、これに限定されない。例えば、ステップS102において、隣接車線のうちの一方から、他車両が自車線に向けて進入する状況であると判定された場合に、直ちに、その他車両に対する割り込み完了判定を開始してもよい。この場合、ステップS103の処理において、他車両の通過は不可能であると判定された場合には、ステップS105に示す処理を中止して、直ちにステップS106に移行するようにしてもよい。
以上詳述した本実施形態によれば、以下の優れた効果が得られる。
ECU10は、進入判定部12と、通過判定部13と、割り込み判定部14と、衝突回避部15とを備えている。進入判定部12は、自車両50が走行する自車線70の一方の隣接車線71から、他車両60が自車線70に向けて進入する状況であるか否かを判定する。通過判定部13は、進入判定部12により他車両60が進入する状況であると判定された場合に、他車両60が、その移動先である他方の隣接車線72に向かって自車線70を通過可能か否かについて判定する。割り込み判定部14は、進入判定部12により他車両60が進入する状況であると判定された場合に、他車両60の状況(横速度、横加速度、位置等)に基づいて、他車両60が自車線70へ割り込むか否かを判定する。衝突回避部15は、通過判定部13により他車両60が自車線70を通過可能であると判定された場合には、割り込み判定部14により他車両60が割り込むと判定されたことを条件として、他車両60と自車両50との衝突回避制御を実行する。このため、他車両60が割り込みを行わない場合に不要な衝突回避制御が実行されることを抑制できる。
他方、ECU10によれば、通過判定部13により他車両60が自車線70を通過不能であると判定された場合には、衝突回避部15は、割り込み判定部14による判定に関わらず、衝突回避制御を実行する。通過判定部13により他車両60が自車線70を通過不能であると判定された場合には、割り込み判定部14による割り込み判定を省略して、速やかに衝突回避制御を実行できる。このため、ECU10における処理時間を低減することができる。
通過判定部13は、移動先領域判定部41を備えている。移動先領域判定部41は、他方の隣接車線72において他車両60の移動先と予測される移動先領域73が確保されているか否かを判定する。移動先領域判定部41により、例えば、移動先領域73が物理的に空き領域として存在するか、または、移動先領域73が進入禁止であるか等を判断することにより、移動先領域73が確保されているか判定できる。そして、この判定結果に基づいて、通過判定部13は、的確かつ速やかに、他車両60が自車線70を通過可能か否かを判定することができる。
通過判定部13は、接近車両判定部42と、移動先衝突判定部43とを備えている。接近車両判定部42は、他方の隣接車線72上に設定された、他方の他車両60の移動先と予測される移動先領域73に向かって移動する接近車両61,62が存在するか否かを判定する。また、移動先衝突判定部43は、移動先領域73において他車両60と接近車両61,62とが衝突するか否かを判定する。接近車両判定部42および移動先衝突判定部43により、移動先領域73に他車両60が進入した場合の接近車両61,62との衝突判定を実行でき、この判定結果に基づいて、通過判定部13は、的確かつ速やかに、他車両60が自車線70を通過可能か否かを判定することができる。
(他の実施形態)
本発明は、上記実施形態に限定されず、例えば以下のように実施してもよい。なお、以下では、各実施形態で互いに同一又は均等である部分には同一符号を付しており、同一符号の部分についてはその説明を援用する。
・上記実施形態において、ECU10は、シートベルト装置を利用して走行支援制御(PCS)を実行してもよい。シートベルト装置は、自車両50の各座席に設けられたシートベルトや、このシートベルトを引き込むプリテンショナにより構成されている。シートベルト装置は、PCSの動作として、自車両50が他車両60に衝突する可能性が高まった場合に、シートベルトの引き込みの予備動作を行う。また衝突を回避できない場合には、シートベルトを引き込んで弛みを除くことにより、ドライバ等の乗員を座席に固定し、乗員の保護を行う。
・他車両60は、4輪自動車に限らず、2輪自動車や自転車が含まれていてもよい。
・上記実施形態において、検出された他車両60が複数ある場合には、車両ごとに走行支援処理を実行してもよいし、最も自車両50に近い他車両60のみを対象として走行支援処理を実行してもよい。
・上記実施形態では、衝突予測時間に基づき、自車両50と他車両60とが衝突する可能性が高いか否かを判定したが、これ以外の方法で衝突の可能性を判定してもよい。例えば、操舵角や自車両50の速度に基づき、自車両50の走行予測進路を特定し、他車両60の情報(位置、速度など)に基づき、他車両60の走行予測進路を特定し、当該走行予測進路同士が交差するか否かにより、衝突の可能性を判定してもよい。
・上記実施形態では、レーダ装置21及び撮像装置22により、他車両60を検出したが、これら以外の装置により、他車両60を検出してもよい。例えば、他車両60と自車両50とを通信可能に構成し、他車両60から受信した情報に基づき、他車両60を検出してもよい。また、レーザセンサを車両検出装置として採用してもよい。また、レーダ装置21及び撮像装置22のうちいずれか一方のみでもよい。
・上記実施形態において、ECU10が、レーダ装置21の物体情報及び撮像装置22の撮像画像に基づき、他車両60の進行方向等を算出したが、レーダ装置21や撮像装置22に算出させてもよい。そして、その算出結果をECU10に出力させてもよい。
・上記実施形態において、ECU10は、衝突回避制御の内容を任意に変更してもよい。