JP7413548B2 - 走行支援装置 - Google Patents
走行支援装置 Download PDFInfo
- Publication number
- JP7413548B2 JP7413548B2 JP2022544476A JP2022544476A JP7413548B2 JP 7413548 B2 JP7413548 B2 JP 7413548B2 JP 2022544476 A JP2022544476 A JP 2022544476A JP 2022544476 A JP2022544476 A JP 2022544476A JP 7413548 B2 JP7413548 B2 JP 7413548B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- steering
- area
- collision
- primary
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 43
- 238000000034 method Methods 0.000 description 22
- 230000008569 process Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 16
- 230000006870 function Effects 0.000 description 12
- 230000008859 change Effects 0.000 description 9
- 230000004048 modification Effects 0.000 description 8
- 238000012986 modification Methods 0.000 description 8
- 230000004913 activation Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 240000004050 Pentaglottis sempervirens Species 0.000 description 1
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
- B62D15/0265—Automatic obstacle avoidance by steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/12—Limiting control by the driver depending on vehicle state, e.g. interlocking means for the control input for preventing unsafe operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4044—Direction of movement, e.g. backwards
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Description
図1に、本実施形態に係る走行支援システムを示す。走行支援システムは、車両に搭載されており、ECU10と、物体検出装置20と、走行状態センサ30と、被制御装置40とを備えている。
2次判定領域設定部14は、2次対象の種別、速度、大きさ、位置等に基づいて、2次判定領域の大きさや設置位置を変更するように構成されていてもよい。同様に、2次対象判定部15は、2次対象の種別、速度、大きさ、位置等に基づいて、2次対象のマージンを変更し、存在領域を変更するように構成されていてもよい。2次対象の種別、速度、大きさは、物体認識部11により、物体検出装置20からの検出情報として取得することができる。
Claims (6)
- 自車の周囲に存在する物体の検出情報に基づいて、前記自車と前記物体との衝突を回避するための走行支援を実行する走行支援装置(10)であって、
前記検出情報に基づいて、前記自車との衝突を回避すべき1次対象となる物体を判定する1次対象判定部(12)と、
前記検出情報に基づいて、前記1次対象との衝突を回避するための前記自車の操舵回避の経路を含むように、自車との衝突を回避すべき2次対象となる物体を判定する2次判定領域を設定する2次判定領域設定部(14)と、
前記検出情報に基づいて、前記2次判定領域において前記2次対象となる物体を判定する2次対象判定部(15)と、
前記自車の操舵支援を実行する操舵支援部(16)と、を備え、
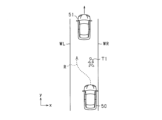
前記2次判定領域設定部は、前記自車の走行車線である自車線内であり、かつ当該自車線が延びる方向において前記1次対象と前記自車との間の全領域を含むように、前記2次判定領域を設定し、
前記操舵支援部は、前記1次対象判定部により前記1次対象が存在すると判定され、かつ、前記2次対象判定部により前記2次対象が存在すると判定された場合に、前記自車の操舵回避を抑制する走行支援装置。 - 前記2次判定領域設定部は、前記検出情報として取得した前記2次対象の種別、速度、大きさ、または位置に基づいて、前記2次判定領域を変更する請求項1に記載の走行支援装置。
- 前記2次対象判定部は、前記検出情報に基づいて、前記2次対象が存在する存在領域を設定し、
前記存在領域が前記2次判定領域内に存在する場合に、前記2次対象が存在すると判定する請求項1または2に記載の走行支援装置。 - 前記2次対象判定部は、前記検出情報として取得した前記2次対象の種別、速度、大きさ、または位置に基づいて、前記存在領域を変更する請求項3に記載の走行支援装置。
- 前記2次対象判定部は、前記2次対象の種別が前記自車の進行方向に対向する方向に走行する車両である対向車の場合には、前記2次対象の種別が前記自車の進行方向と同方向に走行する車両である場合に比べ、前記存在領域を大きく設定する請求項4に記載の走行支援装置。
- 自車の周囲に存在する物体の検出情報に基づいて、前記自車と前記物体との衝突を回避するための走行支援を実行する走行支援装置(10)であって、
前記検出情報に基づいて、前記自車との衝突を回避すべき1次対象となる物体を判定する1次対象判定部(12)と、
前記1次対象との衝突を前記自車の走行車線である自車線内で操舵制御により回避すると判断する場合において、前記検出情報に基づいて、操舵方向先に存在する対向車線を走行する対向車を検出した場合には、前記自車の操舵回避を抑制する操舵支援部(16)とを備える走行支援装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020141756 | 2020-08-25 | ||
| JP2020141756 | 2020-08-25 | ||
| PCT/JP2021/030029 WO2022044885A1 (ja) | 2020-08-25 | 2021-08-17 | 走行支援装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022044885A1 JPWO2022044885A1 (ja) | 2022-03-03 |
| JPWO2022044885A5 JPWO2022044885A5 (ja) | 2023-03-08 |
| JP7413548B2 true JP7413548B2 (ja) | 2024-01-15 |
Family
ID=80354240
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022544476A Active JP7413548B2 (ja) | 2020-08-25 | 2021-08-17 | 走行支援装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230192192A1 (ja) |
| JP (1) | JP7413548B2 (ja) |
| CN (1) | CN115989165A (ja) |
| WO (1) | WO2022044885A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019064336A (ja) | 2017-09-29 | 2019-04-25 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP2020100362A (ja) | 2018-12-25 | 2020-07-02 | 株式会社デンソー | 運転支援装置 |
-
2021
- 2021-08-17 CN CN202180052377.XA patent/CN115989165A/zh active Pending
- 2021-08-17 JP JP2022544476A patent/JP7413548B2/ja active Active
- 2021-08-17 WO PCT/JP2021/030029 patent/WO2022044885A1/ja active Application Filing
-
2023
- 2023-02-23 US US18/173,474 patent/US20230192192A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019064336A (ja) | 2017-09-29 | 2019-04-25 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP2020100362A (ja) | 2018-12-25 | 2020-07-02 | 株式会社デンソー | 運転支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022044885A1 (ja) | 2022-03-03 |
| CN115989165A (zh) | 2023-04-18 |
| JPWO2022044885A1 (ja) | 2022-03-03 |
| US20230192192A1 (en) | 2023-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107408345B (zh) | 物标存在判定方法以及装置 | |
| JP6412457B2 (ja) | 運転支援装置、及び運転支援方法 | |
| JP6561584B2 (ja) | 車両制御装置、及び車両制御方法 | |
| CN109204311B (zh) | 一种汽车速度控制方法和装置 | |
| JP6453695B2 (ja) | 運転支援装置、及び運転支援方法 | |
| WO2016158944A1 (ja) | 車両制御装置及び車両制御方法 | |
| WO2016190103A1 (ja) | 車両制御装置及び車両制御方法 | |
| WO2018110607A1 (ja) | 車両における衝突回避装置および衝突回避方法 | |
| WO2016186124A1 (ja) | 車両制御方法及び装置 | |
| WO2018074287A1 (ja) | 車両制御装置 | |
| WO2017104773A1 (ja) | 移動体制御装置及び移動体制御方法 | |
| WO2017065212A1 (ja) | 車両制御装置及び車両制御方法 | |
| US11208084B2 (en) | Brake assistance apparatus and brake assistance control method for vehicle | |
| JP2017117345A (ja) | 運転支援装置及び運転支援方法 | |
| US10787170B2 (en) | Vehicle control method and apparatus | |
| JP6740970B2 (ja) | 走行支援装置 | |
| WO2016158634A1 (ja) | 車両制御装置及び車両制御方法 | |
| JP2017117344A (ja) | 走行支援装置 | |
| JP2019153039A (ja) | 車両制御装置 | |
| JP2017068461A (ja) | 車両の運転支援装置 | |
| US20200353919A1 (en) | Target detection device for vehicle | |
| CN113544031A (zh) | 驾驶辅助装置 | |
| US20230166730A1 (en) | Vehicle control device | |
| JP6733616B2 (ja) | 車両制御装置 | |
| JP7413548B2 (ja) | 走行支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221223 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7413548 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |