JP2019028862A - 管理方法、管理装置、及び管理システム - Google Patents
管理方法、管理装置、及び管理システム Download PDFInfo
- Publication number
- JP2019028862A JP2019028862A JP2017149704A JP2017149704A JP2019028862A JP 2019028862 A JP2019028862 A JP 2019028862A JP 2017149704 A JP2017149704 A JP 2017149704A JP 2017149704 A JP2017149704 A JP 2017149704A JP 2019028862 A JP2019028862 A JP 2019028862A
- Authority
- JP
- Japan
- Prior art keywords
- user
- time
- parking lot
- vehicle
- meeting place
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Abstract
【課題】ユーザが自動車との待ち合わせ場所に待ち合わせ時刻までに到着できない場合でも、ユーザが待ち合わせ時刻までに自動車と待ち合わせることができる新たな待ち合わせ場所を決定することができる管理装置を提供する。【解決手段】駐車場所管理サーバ1は、ユーザと自動車との待ち合わせを管理する管理装置であって、ユーザの現在位置及び待ち合わせ場所までのユーザの移動方法を示すユーザ情報を取得するユーザ情報通信部11と、ユーザ情報を基に、ユーザが待ち合わせ場所に到着するユーザ到着予定時刻を推定し、ユーザ到着予定時刻が待ち合わせ場所での待ち合わせ時刻以前であるか否かを判定する到着時間算出部13と、ユーザ到着予定時刻が待ち合わせ場所での待ち合わせ時刻以前でないと判定された場合、ユーザ情報を基に、ユーザが待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定する駐車場選択部14及び配送先決定部17とを備える。【選択図】図1
Description
本開示は、ユーザと自動車との待ち合わせを管理する管理方法及び管理装置、並びに該管理装置を備える管理システムに関するものである。
近年、自動運転(自動走行、または無人走行)を行う自動車である自律走行車に関する技術開発が行われ、このような自律走行車を自動運転配送車として用い、荷物を配送する構想や実用化実験が行われている。また、配車対象となる自動車として自動運転自動車を用いる配車方法も提案されている。
例えば、特許文献1には、配車管理サーバと自動運転車からなり、利用者による配車管理サーバに対する配車要求に基づいて、配車管理サーバが自動運転車を利用者に対して配車するようにする配車管理システムが開示されている。
また、特許文献2には、センタ装置と自動運転機能を有する車両とが通信可能に構成された自動配車システムが開示されている。
しかしながら、上記の従来技術では、荷物の受取場所やユーザの乗車場所となるユーザと自動車との待ち合わせ場所に、ユーザが待ち合わせ時刻までに到着できない場合については何ら検討されておらず、ユーザが待ち合わせ時刻までに到着できない場合の待ち合わせ場所の決定方法については、更なる改善が必要とされていた。
本開示は、上記課題を解決するためになされたもので、ユーザが自動車との待ち合わせ場所に待ち合わせ時刻までに到着できない場合でも、ユーザが待ち合わせ時刻までに自動車と待ち合わせるための管理方法、管理装置、及び管理システムを提供することを目的とするものである。
本開示の一態様に係る管理方法は、ユーザと自動車との待ち合わせを管理する管理方法であって、前記ユーザの現在位置、及び待ち合わせ場所までの前記ユーザの移動方法を示すユーザ情報を取得し、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ場所に到着するユーザ到着予定時刻を推定し、前記ユーザ到着予定時刻が前記待ち合わせ場所での待ち合わせ時刻以前であるか否かを判定し、前記ユーザ到着予定時刻が前記待ち合わせ時刻以前でないと判定された場合、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定する。
本開示によれば、ユーザが自動車との待ち合わせ場所に待ち合わせ時刻までに到着できない場合でも、新たな待ち合わせ場所を決定することで、ユーザが待ち合わせ時刻までに自動車と待ち合わせることができる。
(本開示の基礎となった知見)
自動運転による荷物の配送が行われることを想定すると、荷物の受取のために受取人の家の前で無人の自動車が駐車し続けることは困難である。このため、荷物の受取場所として駐車場を利用することが考えられ、受取人が指定した駐車場で受取人が指定した受取時刻(待ち合わせ時刻)に荷物の受取が行われる。
自動運転による荷物の配送が行われることを想定すると、荷物の受取のために受取人の家の前で無人の自動車が駐車し続けることは困難である。このため、荷物の受取場所として駐車場を利用することが考えられ、受取人が指定した駐車場で受取人が指定した受取時刻(待ち合わせ時刻)に荷物の受取が行われる。
しかしながら、駐車時間に応じて料金を徴収される駐車場では、利用時間に応じて料金が増加するため、受取人が待ち合わせ時刻に遅れ、この遅延時間だけ余計に自動車が駐車場に駐車した場合、駐車料金が加算され、運送会社又は受取人は、加算された駐車料金を余計に負担しなければならない。
また、受取人が待ち合わせ時刻に間に合わない場合、待ち合わせ場所を別の近隣の駐車場に変更する等の対応が考えられるが、都合よく空きがある駐車場を探すことも困難である。
上記課題を解決するため、本願発明者らは、ユーザが自動車との待ち合わせ場所として駐車場を利用し、ユーザが待ち合わせ時刻までに駐車場に到着できない場合に、ユーザ及び自動車の双方に好適な待ち合わせ場所を如何にして決定するかについて鋭意検討を行った結果、本開示を完成したものである。
本開示の一態様に係る管理方法は、ユーザと自動車との待ち合わせを管理する管理方法であって、前記ユーザの現在位置、及び前記待ち合わせ場所までの前記ユーザの移動方法を示すユーザ情報を取得し、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ場所に到着するユーザ到着予定時刻を推定し、前記ユーザ到着予定時刻が前記待ち合わせ場所での待ち合わせ時刻以前であるか否かを判定し、前記ユーザ到着予定時刻が前記待ち合わせ時刻以前でないと判定された場合、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定する。
この構成によれば、ユーザの現在位置及び待ち合わせ場所までのユーザの移動方法を示すユーザ情報を取得し、取得したユーザ情報を基に、ユーザが待ち合わせ場所に到着するユーザ到着予定時刻を推定し、推定したユーザ到着予定時刻が待ち合わせ場所での待ち合わせ時刻以前であるか否かを判定し、ユーザ到着予定時刻が待ち合わせ時刻以前でないと判定された場合、ユーザ情報を基に、ユーザが待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定しているので、ユーザが自動車との待ち合わせ場所に待ち合わせ時刻までに到着できない場合でも、新たな待ち合わせ場所を決定することで、ユーザが待ち合わせ時刻までに自動車と待ち合わせることができ、駐車料金の加算を防ぐことができる。
前記決定は、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ時刻までに前記ユーザの現在位置から到着可能な到着可能範囲を決定し、前記到着可能範囲内の前記他の待ち合わせ場所を決定するようにしてもよい。
この構成によれば、ユーザ情報を基に、ユーザが待ち合わせ時刻までにユーザの現在位置から到着可能な到着可能範囲を決定し、決定した到着可能範囲内の他の待ち合わせ場所を決定しているので、到着可能範囲を定めることによりユーザが待ち合わせ時刻までに自動車と待ち合わせることができる新たな待ち合わせ場所を効率的に決定することができる。
前記待ち合わせ場所は、駐車場であり、前記決定は、前記到着可能範囲内に複数の駐車場がある場合、各駐車場の前記待ち合わせ時刻における空車領域の数を過去の情報に基づいて予測し、前記空車領域の数が最も多い駐車場を前記他の待ち合わせ場所として決定するようにしてもよい。
この構成によれば、到着可能範囲内に複数の駐車場がある場合、各駐車場の待ち合わせ時刻における空車領域の数を予測し、予測した空車領域の数が最も多い駐車場を他の待ち合わせ場所として決定しているので、自動車が待ち合わせ時刻に駐車可能であると予測され、かつ、ユーザが待ち合わせ時刻までに自動車と待ち合わせることのできる駐車場を新たな待ち合わせ場所として決定することができる。
前記決定は、前記到着可能範囲内の駐車場毎に、現在時刻の空車領域の数から現在時刻に対応する過去の空車領域の平均数を減算し、減算結果に前記待ち合わせ時刻に対応する過去の空車領域の平均数を加算することにより、各駐車場の前記待ち合わせ時刻における空車領域の数を予測するようにしてもよい。
この構成によれば、到着可能範囲内の駐車場毎に、現在時刻の空車領域の数から現在時刻に対応する過去の空車領域の平均数を減算し、減算結果に待ち合わせ時刻に対応する過去の空車領域の平均数を加算することにより、各駐車場の待ち合わせ時刻における空車領域の数を予測しているので、到着可能範囲内の各駐車場の待ち合わせ時刻における空車領域の数を正確に予測することができる。
前記自動車の現在位置を示す車両情報を取得し、前記判定は、前記自動車の現在位置を基に、前記自動車が前記待ち合わせ場所に到着する車両到着予定時刻を推定し、前記車両到着予定時刻が前記待ち合わせ時刻以前であるか否かを判定し、前記決定は、前記車両到着予定時刻が前記待ち合わせ時刻以前でない場合、前記自動車が前記待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定するようにしてもよい。
この構成によれば、自動車の現在位置を示す車両情報を取得し、取得した自動車の現在位置を基に、自動車が前記待ち合わせ場所に到着する車両到着予定時刻を推定し、推定した車両到着予定時刻が待ち合わせ時刻以前であるか否かを判定し、車両到着予定時刻が待ち合わせ時刻以前でない場合、自動車が待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定しているので、自動車が待ち合わせ時刻までに到着可能であることから、自動車が待ち合わせ時刻を過ぎることなく、待ち合わせることができる。
前記自動車は、自動運転により前記ユーザの荷物を配送する自動運転配送車であり、前記自動運転配送車は、前記駐車場で前記ユーザに荷物を引き渡すようにしてもよい。
この構成によれば、自動運転によりユーザの荷物を配送する自動運転配送車が駐車場でユーザに荷物を引き渡すので、自動運転配送車がユーザとの荷物の受け渡し場所として有料の駐車場を利用し、ユーザが自動運転配送車との待ち合わせ場所に待ち合わせ時刻までに到着できない場合でも、ユーザが待ち合わせ時刻までに自動運転配送車と待ち合わせることができる新たな待ち合わせ場所を決定することができるとともに、不要な駐車場費用を削減することができる。
前記自動車は、自動運転により前記ユーザを輸送する自動運転輸送車であり、前記自動運転輸送車は、前記駐車場で乗車した前記ユーザを輸送するようにしてもよい。
この構成によれば、自動運転によりユーザを輸送する自動運転輸送車が駐車場で乗車したユーザを輸送するので、自動運転輸送車がユーザの乗車場所として有料の駐車場を利用し、ユーザが自動運転輸送車との待ち合わせ場所に待ち合わせ時刻までに到着できない場合でも、ユーザが待ち合わせ時刻までに自動運転輸送車と待ち合わせることができる新たな待ち合わせ場所を決定することができるとともに、不要な駐車場費用を削減することができる。
また、本開示は、以上のような特徴的な処理を実行する管理方法として実現することができるだけでなく、このような管理方法に含まれる特徴的な処理に対応する特徴的な構成を備える管理装置として実現したり、この管理装置を備える管理システムなどとして実現したりすることもできる。また、このような管理方法に含まれる特徴的な処理を、プロセッサ及びメモリ等を備えるコンピュータに実行させるコンピュータプログラムとして実現することもできる。そして、上記のようなコンピュータプログラムを、CD−ROM等のコンピュータ読み取り可能な非一時的な記録媒体あるいはインターネット等の通信ネットワークを介して流通させることができるのは、言うまでもない。
したがって、以下の他の態様でも、上記の管理方法と同様の効果を奏することができる。
本開示の他の態様に係る管理装置は、ユーザと自動車との待ち合わせを管理する管理装置であって、前記ユーザの現在位置、及び待ち合わせ場所までの前記ユーザの移動方法を示すユーザ情報を取得する取得部と、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ場所に到着するユーザ到着予定時刻を推定し、前記ユーザ到着予定時刻が前記待ち合わせ場所での待ち合わせ時刻以前であるか否かを判定する判定部と、前記ユーザ到着予定時刻が前記待ち合わせ時刻以前でないと判定された場合、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定する決定部とを備える。
また、本開示の他の態様に係る管理システムは、自動車と、ユーザが使用するユーザ端末と、上記の管理装置とを備える。
(実施の形態)
なお、以下で説明する実施の形態は、いずれも本開示の一具体例を示すものである。以下の実施の形態で示される形状、構成要素、ステップ、ステップの順序などは、一例であり、本開示を限定する主旨ではない。また、以下の実施の形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。また、全ての実施の形態において、各々の内容を組み合わせることもできる。さらに、本開示の主旨を逸脱しない限り、本開示の各実施の形態に対して当業者が想到する範囲内の変更を施した各種変形例も本開示に含まれる。
なお、以下で説明する実施の形態は、いずれも本開示の一具体例を示すものである。以下の実施の形態で示される形状、構成要素、ステップ、ステップの順序などは、一例であり、本開示を限定する主旨ではない。また、以下の実施の形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。また、全ての実施の形態において、各々の内容を組み合わせることもできる。さらに、本開示の主旨を逸脱しない限り、本開示の各実施の形態に対して当業者が想到する範囲内の変更を施した各種変形例も本開示に含まれる。
以下、本開示の一実施の形態について、図面を参照しながら説明する。図1は、本開示の一実施の形態における駐車場所管理システムの構成の一例を示すブロック図である。
図1に示す駐車場所管理システムは、駐車場所管理サーバ1、ユーザ端末2、自動運転配送車3、及び複数の駐車場管理装置41〜4nを備える。駐車場所管理サーバ1、ユーザ端末2、自動運転配送車3、及び複数の駐車場管理装置41〜4nは、インターネット、専用回線等の所定の有線又は無線のネットワーク5を介して、通信可能に接続されている。
自動運転配送車3は、車両内の所定位置に複数のロッカーが配置され、ロッカーに収容された受取人(ユーザ)の荷物を配送する自律走行車である。自動運転配送車3は、米SAE Internationalが定めたJ3016の定義によるSAEレベル5の完全自動走行(すべての道路及び環境条件の下における自動運転システムによる全ての動的運転タスクの実施)を行い、無人の状態で荷物を配達する。
自動運転配送車3は、受取人との待ち合わせ場所となる荷物の受け渡し場所として、有料の駐車場を利用し、駐車場で受取人との待ち合わせを行う。なお、駐車場としては、種々の駐車場を用いることができ、例えば、複数の駐車領域が明確に区画された駐車場、駐車領域が明確に区画されていない駐車場等が該当する。
ユーザ端末2は、例えば、プロセッサ、メモリ、タッチパネル、及び通信装置等を備えるスマートフォン等から構成され、受取人は、荷物の受け取りにユーザ端末2を使用する。ユーザ端末2の構成は、上記の例に特に限定されず、タブレット、携帯型のパーソナルコンピュータ等の他の端末を用いてもよい。
駐車場管理装置41〜4nの各々は、例えば、自動運転配送車3が荷物の受け渡し場所として利用する各駐車場に設置され、各駐車場の空車領域の数を示す空車情報を駐車場所管理サーバ1に送信する。なお、駐車場の空車領域の数を示す空車情報の取得方法は、上記の例に特に限定されず、他の車両から空車情報を取得したり、他のサーバ等から取得する等の種々の変更が可能である。
駐車場所管理サーバ1は、プロセッサ、メモリ、外部記憶装置、及び通信装置等を備えるクラウドサーバ等から構成され、受取人と自動運転配送車3との待ち合わせ場所を管理する管理装置の一例である。なお、駐車場所管理サーバ1の構成は、上記の例に特に限定されず、各機能を複数のサーバで分担したり、自動運転配送車3が一部又は全ての機能を備えたりする等の種々の変更が可能である。
駐車場所管理サーバ1は、受取人の現在位置及び配送先までの交通手段(待ち合わせ場所までの受取人の移動方法)を示すユーザ情報と、自動運転配送車3の現在位置を示す車両情報とを取得し、これらの情報と、配送先の駐車場(待ち合わせ場所)の位置及び荷物の受取時刻(待ち合わせ時刻)の情報とを基に、受取時刻で駐車場での受取が可能か否かを判定し、受取時刻で駐車場での受取が困難であると判定した場合に、別の駐車場での受取条件を再計算し、別の駐車場の現在の空車情報と受取時刻の空車予測情報とを用いて、受取時刻において、より空車数が多くなると判定した駐車場を新たな待ち合わせ場所として決定する。
なお、本開示の自律走行車は、上記の自動運転配送車に特に限定されず、自動運転によりユーザを輸送する自動運転輸送車であってもよい。この場合、自動運転輸送車は、駐車場でユーザとの待ち合わせを行い、駐車場で乗車したユーザをユーザが所望する場所へ輸送する。
駐車場所管理サーバ1は、ユーザ情報通信部11、車両情報通信部12、到着時間算出部13、駐車場選択部14、駐車場空車状況取得部15、駐車場空車状況管理部16、及び配送先決定部17を備える。ユーザ端末2は、通信部21、機器制御部22、及びタッチパネル部23を備える。自動運転配送車3は、通信部31、及び車両制御部32を備える。
駐車場所管理サーバ1の配送先決定部17は、荷物の配送スケジュールを管理しており、受取人と自動運転配送車3との待ち合わせ場所となる駐車場の位置を示す駐車場位置情報と、受取人と自動運転配送車3との待ち合わせ時刻となる受取時刻を示す受取時刻情報とを記憶している。配送先決定部17は、駐車場位置情報及び受取時刻情報を到着時間算出部13及び駐車場選択部14に出力する。
また、配送先決定部17は、ユーザ情報通信部11及び車両情報通信部12を用いて、駐車場位置情報及び受取時刻情報を事前にユーザ端末2及び自動運転配送車3に送信する。したがって、受取人は、ユーザ端末2を用いて駐車場位置情報及び受取時刻情報を確認し、受取人及び自動運転配送車3は、受取時刻までに駐車場に到着するように移動する。なお、駐車場位置情報及び受取時刻情報の送信方法は、上記の例に特に限定されず、受取人が駐車場及び受取時刻を決定し、受取人が希望する駐車場及び受取時刻を示す駐車場位置情報及び受取時刻情報をユーザ端末2から駐車場所管理サーバ1及び自動運転配送車3に送信する等の種々の変更が可能である。
自動運転配送車3の車両制御部32は、自動運転配送車3のエンジン、ハンドル、アクセル、ブレーキ等(図示省略)を含む自動運転配送車3の駆動系部品を制御する。車両制御部32は、通信部31を介して受信した駐車場位置情報及び受取時刻情報を用いて、自動運転配送車3を自動運転により走行させることにより、受取時刻までに受取人が荷物を受け取る駐車場に自動運転配送車3を到着させ、その後、受取人が到着するまで自動運転配送車3を駐車場に駐車させて待機させる。
また、車両制御部32は、GPS(Global Positioning System)機能を有し、例えば、自動運転配送車3の現在の車両位置の緯度情報及び経度情報を位置情報として取得し、取得した位置情報を通信部31に出力する。通信部31は、自動運転配送車3の現在位置を示す位置情報を車両情報として駐車場所管理サーバ1に送信する。
ユーザ端末2のタッチパネル部23は、機器制御部22の制御下で、受取人が操作する操作部及び受取人に種々の画面を表示する表示部として機能する。タッチパネル部23は、受取人により入力された、待ち合わせ場所となる駐車場までの受取人の移動方法(例えば、徒歩、乗用車、バス、電車等の移動手段)を示す移動情報を機器制御部22に出力する。機器制御部22は、GPS機能を有し、例えば、ユーザ端末2すなわち受取人の現在の緯度情報及び経度情報を位置情報として取得し、取得した位置情報を移動情報とともに通信部21に出力する。通信部21は、受取人の現在位置を示す位置情報及び待ち合わせ場所となる駐車場までの受取人の移動方法を示す移動情報をユーザ情報として駐車場所管理サーバ1に送信する。
駐車場所管理サーバ1のユーザ情報通信部11は、ユーザ端末2からユーザ情報を受信して到着時間算出部13及び駐車場選択部14に出力する。車両情報通信部12は、自動運転配送車3から車両情報を受信して到着時間算出部13に出力する。
到着時間算出部13は、自動運転配送車3が利用する複数の駐車場を含む地図情報を予め記憶している。到着時間算出部13は、地図情報、駐車場位置情報、受取時刻情報、及びユーザ情報を基に、受取人が待ち合わせ場所となる駐車場に到着するユーザ到着予定時刻を推定し、ユーザ到着予定時刻が受取時刻以前であるか否かを判定して判定結果を駐車場選択部14に出力する。
駐車場選択部14は、ユーザ到着予定時刻が受取時刻以前でないと判定された場合、駐車場位置情報、受取時刻情報及びユーザ情報を基に、受取人が受取時刻までに到着可能な他の駐車場を選択し、選択結果を配送先決定部17に出力する。
具体的には、駐車場選択部14は、自動運転配送車3が利用する複数の駐車場を含む地図情報を予め記憶している。駐車場選択部14は、地図情報、駐車場位置情報、受取時刻情報及びユーザ情報を基に、受取人が受取時刻までに受取人の現在位置から到着可能な到着可能範囲を決定し、この到着可能範囲内の他の駐車場を選択する。また、駐車場選択部14は、到着可能範囲内に複数の駐車場がある場合、各駐車場の受取時刻における空車領域の数を予測し、空車領域の数が最も多い駐車場を選択する。
ここで、駐車場空車状況取得部15は、各駐車場管理装置41〜4nから駐車場の空車領域の数を示す空車情報を受信して取得し、各駐車場の空車領域の数を示す空車情報を駐車場空車状況管理部16に出力する。駐車場空車状況管理部16は、過去の各駐車場の空車領域の数を集計して管理し、各駐車場の時間帯に対する空車領域の平均数を求める。駐車場選択部14は、駐車場空車状況取得部15から各駐車場の現在時刻の空車領域の数を示す空車情報を取得し、駐車場空車状況管理部16から現在時刻に対応する過去の空車領域の平均数と、受取時刻に対応する過去の空車領域の平均数とを取得する。駐車場選択部14は、到着可能範囲内の駐車場毎に、現在時刻の空車領域の数から現在時刻に対応する過去の空車領域の平均数を減算し、減算結果に受取時刻に対応する過去の空車領域の平均数を加算することにより、各駐車場の受取時刻における空車領域の数を予測する。
また、到着時間算出部13は、駐車場位置情報、受取時刻情報及び車両情報を基に、空車領域の数が最も多い駐車場に自動運転配送車3が到着する車両到着予定時刻を推定し、車両到着予定時刻が受取時刻以前であるか否かを判定して判定結果を駐車場選択部14に出力する。
駐車場選択部14は、車両到着予定時刻が受取時刻以前である場合、空車領域の数が最も多い駐車場を選択し、車両到着予定時刻が受取時刻以前でない場合、自動運転配送車3が受取時刻までに到着可能な複数の駐車場の中から空車領域の数が最も多い駐車場を選択する。
配送先決定部17は、駐車場選択部14の選択結果を基に、受取人及び自動運転配送車3が受取時刻までに到着可能な他の駐車場を新たな待ち合わせ場所として決定し、新たな待ち合わせ場所となる駐車場を示す配送先情報をユーザ情報通信部11及び車両情報通信部12に出力する。
ユーザ情報通信部11は、配送先情報をユーザ端末2に送信し、ユーザ端末2のタッチパネル部23は、通信部21及び機器制御部22を介して通知された配送先情報が示す駐車場を表示し、受取人に待ち合わせ場所が変更されたことを通知する。受取人は、変更された新たな駐車場に受取時刻までに移動する。また、車両情報通信部12は、配送先情報を自動運転配送車3に送信し、自動運転配送車3の車両制御部32は、通信部31を介して通知された配送先情報が示す駐車場まで自動運転配送車3を自動運転により走行させた後、受取人が到着するまで新たな駐車場に駐車させて待機させる。したがって、受取人が自動運転配送車3との待ち合わせ場所となる駐車場に受取時刻までに到着できない場合でも、受取人が受取時刻までに自動運転配送車3と待ち合わせることができる新たな駐車場を決定することができる。
次に、上記のように構成された駐車場所管理サーバ1の駐車場所変更処理について説明する。図2は、図1に示す駐車場所管理サーバ1による駐車場所変更処理の一例を示すフローチャートである。
まず、車両情報通信部12は、自動運転配送車3から車両情報を受信して到着時間算出部13に出力する(ステップS11)。
次に、ユーザ情報通信部11は、ユーザ端末2からユーザ情報を受信して到着時間算出部13及び駐車場選択部14に出力する(ステップS12)。
次に、到着時間算出部13は、配送先決定部17から駐車場位置情報を取得し、駐車場位置情報、及びユーザ情報を基に、受取人が待ち合わせ場所となる駐車場に到着するユーザ到着予定時刻を推定する(ステップS13)。
次に、到着時間算出部13は、配送先決定部17から受取時刻情報を取得し、ユーザ到着予定時刻が受取時刻以前であるか否かを判定する(ステップS14)。ユーザ到着予定時刻が受取時刻以前である場合(ステップS14でYES)、受取人は受取時刻までに待ち合わせ場所となる駐車場に到着できるので、処理を終了する。
一方、ユーザ到着予定時刻が受取時刻以前でない場合(ステップS14でNO)、到着時間算出部13は、ユーザ到着予定時刻が受取時刻以前でないことを駐車場選択部14に通知し、駐車場選択部14は、駐車場位置情報、受取時刻情報及びユーザ情報を基に、受取人が受取時刻までに受取人の現在位置から到着可能な到着可能範囲を決定して絞り込み、この到着可能範囲内の他の駐車場を選択する(ステップS15)。なお、ユーザが受取時刻に間に合わないという旨の通知をサーバにすることにより、駐車場選択部14が駐車場位置情報、受取時刻情報及びユーザ情報を基に、受取人が受取時刻までに到着可能範囲内の他の駐車場を選択してもよい。
次に、駐車場選択部14は、選択した他の駐車場の現在時刻の空車領域の数を示す空車情報を駐車場空車状況取得部15から取得する(ステップS16)。
次に、駐車場選択部14は、駐車場空車状況管理部16から現在時刻に対応する過去の空車領域の平均数と、受取時刻に対応する過去の空車領域の平均数とを取得し、到着可能範囲内の駐車場毎に、現在時刻の空車領域の数から現在時刻に対応する過去の空車領域の平均数を減算し、減算結果に受取時刻に対応する過去の空車領域の平均数を加算することにより、各駐車場の受取時刻における空車領域の数を予測する(ステップS17)。
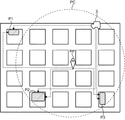
図3は、駐車場の時間帯に対する空車領域の平均数の一例を示す図である。図3の縦軸は空車領域の平均数A(T)を示し、横軸は時間Tを示し、曲線は、駐車場Xの時間帯に対する空車領域の平均数を示している。駐車場空車状況管理部16は、例えば、図3に示す駐車場Xの時間帯に対する空車領域の平均数を記憶している。駐車場選択部14は、駐車場Xの時間Tにおける空車領域の平均数をA(T)、駐車場Xの時間Tにおける実際のの空車領域の数をB(T)、現在時刻をt0、受取時刻をt1とすると、(B(t0)−A(t0))+A(t1)を計算することにより、駐車場Xの受取時刻における空車領域の数を予測する。なお、各駐車場の受取時刻における空車領域の数を予測する方法は、上記の例に特に限定されず、受取時刻に対応する過去の空車領域の平均数をそのまま受取時刻における空車領域の数として予測したり、過去の平均数を総合的に用いる以外にも、過去の、曜日ごとの平均数や、ある特定の季節またはある一定期間ごとの平均数、天気ごとの平均数を用いて予測する等の種々の変更が可能である。
次に、駐車場選択部14は、空車領域が有り、且つ受取時刻における空車領域の数が多いと予測される順に駐車場を選択し、選択結果を配送先決定部17に出力する(ステップS18)。
次に、配送先決定部17は、選択結果から選択可能な駐車場があるか否かを判定し(ステップS19)、選択可能な駐車場がない場合(ステップS19でNO)、荷物の受取場所及び受取時刻を改めて再配送することを通知する再配送情報を作成してユーザ情報通信部11及び車両情報通信部12に出力し、ユーザ情報通信部11及び車両情報通信部12は、再配送情報をユーザ端末2及び自動運転配送車3に送信し(ステップS23)、処理を終了する。この場合、受取人は、ユーザ端末2を用いて再配送情報を確認し、再配送を待つこととなり、自動運転配送車3は、次の荷物の配達を行う。
一方、選択可能な駐車場がある場合(ステップS19でYES)、配送先決定部17は、車両到着予定時刻の推定を到着時間算出部13に指示し、到着時間算出部13は、駐車場選択部14から空車領域の数が最も多い駐車場の位置を示す駐車場位置情報を取得し、駐車場位置情報、受取時刻情報及び車両情報を基に、空車領域の数が最も多い駐車場に自動運転配送車3が到着する車両到着予定時刻を推定する(ステップS20)。
次に、到着時間算出部13は、車両到着予定時刻が受取時刻以前であるか否かを判定し(ステップS21)、車両到着予定時刻が受取時刻以前でない場合(ステップS21でNO)、ステップS18に戻り、駐車場選択部14は、車両到着予定時刻が受取時刻以前でない駐車場を選択対象から排除して、空車領域が有り、且つ受取時刻における空車領域の数が多いと予測される順に駐車場を選択し、以降の処理を継続する。
一方、車両到着予定時刻が受取時刻以前である場合(ステップS21でYES)、到着時間算出部13は、車両到着予定時刻が受取時刻以前であることを配送先決定部17に通知し、配送先決定部17は、新たな待ち合わせ場所となる空車領域の数が多い駐車場を示す配送先情報を作成してユーザ情報通信部11及び車両情報通信部12に出力し、ユーザ情報通信部11及び車両情報通信部12は、配送先情報をユーザ端末2及び自動運転配送車3に送信し(ステップS22)、処理を終了する。この場合、受取人は、ユーザ端末2を用いて配送先情報を確認し、変更された新たな駐車場に受取時刻までに移動し、自動運転配送車3も、変更された新たな駐車場まで自動運転により走行した後、受取人が到着するまで新たな駐車場に駐車して待機する。
図4は、図1に示す駐車場所管理サーバ1による駐車場の選択方法の一例を説明するための模式図である。図4に示す例は、地図上の図示の位置にいる受取人RPが待ち合わせ場所である駐車場P1まで徒歩で移動し、地図上の図示の位置にいる自動運転配送車3も駐車場P1まで走行し、荷物の受取時刻が12:10である例である。
まず、到着時間算出部13は、駐車場P1の駐車場位置情報、及び受取人RPのユーザ情報を基に、受取人RPが徒歩で駐車場P1に到着するユーザ到着予定時刻12:15を推定する。この場合、ユーザ到着予定時刻12:15は、受取時刻12:10を過ぎているので、到着時間算出部13は、ユーザ到着予定時刻が受取時刻以前でないと判定し、駐車場選択部14は、受取時刻情報及び受取人RPのユーザ情報を基に、受取人RPが受取時刻12:10までに現在位置から徒歩で到着可能な到着可能範囲PCとして図中に破線で示す円領域を決定し、到着可能範囲PC内の他の駐車場P2、P3を選択する。
次に、駐車場選択部14は、駐車場P2の受取時刻12:10における空車領域の数として6台を予測し、駐車場P3の受取時刻12:10における空車領域の数として3台を予測する。到着時間算出部13は、駐車場P2の空車領域の数(6台)が駐車場P3の空車領域の数(3台)より多いので、自動運転配送車3が駐車場P2に到着する車両到着予定時刻12:05を推定する。配送先決定部17は、車両到着予定時刻12:05が受取時刻12:10以前であるため、新たな待ち合わせ場所として駐車場P2を選択する。
上記の処理により、本実施の形態では、受取人の現在位置及び待ち合わせ場所となる駐車場までの受取人の移動方法を示すユーザ情報を取得し、取得したユーザ情報を基に、受取人が待ち合わせ場所となる駐車場に到着するユーザ到着予定時刻を推定し、推定したユーザ到着予定時刻が荷物の受取時刻以前であるか否かを判定し、ユーザ到着予定時刻が荷物の受取時刻以前でないと判定された場合、ユーザ情報を基に、受取人が荷物の受取時刻までに到着可能な他の駐車場を決定しているので、受取人が自動運転配送車3との待ち合わせ場所となる駐車場に荷物の受取時刻までに到着できない場合でも、受取人が荷物の受取時刻までに自動運転配送車3と待ち合わせることができる新たな待ち合わせ場所となる駐車場を決定することができ、受取人は荷物の受取時刻までに自動運転配送車3と確実に待ち合わせることができる。
なお、ここまでSAEレベル5の自動運転を行う自律走行車について述べたが、本開示の実施の形態はSAEレベル1〜4の自動運転を行う自律走行車に適用してもよく、SAEレベル0の運転を行う自動車(手動の自動車)に適用してもよい。また、受取人は、荷物を取り出す動作を行う人又は物であって、例えば、最終的に荷物を受け取る人の他に、配達人、受け取り代理人(管理人、コンシェルジュ等)、又はそれらの働きをするロボット等にも適用可能である。
本開示に係る管理方法、管理装置、及び管理システムは、ユーザが自動車との待ち合わせ場所に待ち合わせ時刻までに到着できない場合でも、ユーザが待ち合わせ時刻までに自動車と待ち合わせることができる新たな待ち合わせ場所を決定することができるので、ユーザと自動車との待ち合わせを管理する管理方法及び管理装置、並びに該管理装置を備える管理システムとして有用である。
1 駐車場所管理サーバ
2 ユーザ端末
3 自動運転配送車
11 ユーザ情報通信部
12 車両情報通信部
13 到着時間算出部
14 駐車場選択部
15 駐車場空車状況取得部
16 駐車場空車状況管理部
17 配送先決定部
21 通信部
22 機器制御部
23 タッチパネル部
31 通信部
32 車両制御部
41〜4n 駐車場管理装置
2 ユーザ端末
3 自動運転配送車
11 ユーザ情報通信部
12 車両情報通信部
13 到着時間算出部
14 駐車場選択部
15 駐車場空車状況取得部
16 駐車場空車状況管理部
17 配送先決定部
21 通信部
22 機器制御部
23 タッチパネル部
31 通信部
32 車両制御部
41〜4n 駐車場管理装置
Claims (9)
- ユーザと自動車との待ち合わせを管理する管理方法であって、
前記ユーザの現在位置、及び待ち合わせ場所までの前記ユーザの移動方法を示すユーザ情報を取得し、
前記ユーザ情報を基に、前記ユーザが前記待ち合わせ場所に到着するユーザ到着予定時刻を推定し、前記ユーザ到着予定時刻が前記待ち合わせ場所での待ち合わせ時刻以前であるか否かを判定し、
前記ユーザ到着予定時刻が前記待ち合わせ時刻以前でないと判定された場合、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定する、
管理方法。 - 前記決定は、
前記ユーザ情報を基に、前記ユーザが前記待ち合わせ時刻までに前記ユーザの現在位置から到着可能な到着可能範囲を決定し、前記到着可能範囲内の前記他の待ち合わせ場所を決定する、
請求項1記載の管理方法。 - 前記待ち合わせ場所は、駐車場であり、
前記決定は、
前記到着可能範囲内に複数の駐車場がある場合、各駐車場の前記待ち合わせ時刻における空車領域の数を過去の情報に基づいて予測し、前記空車領域の数が最も多い駐車場を前記他の待ち合わせ場所として決定する、
請求項2記載の管理方法。 - 前記決定は、
前記到着可能範囲内の駐車場毎に、現在時刻の空車領域の数から現在時刻に対応する過去の空車領域の平均数を減算し、減算結果に前記待ち合わせ時刻に対応する過去の空車領域の平均数を加算することにより、各駐車場の前記待ち合わせ時刻における空車領域の数を予測する、
請求項3記載の管理方法。 - 前記自動車の現在位置を示す車両情報を取得し、
前記判定は、
前記自動車の現在位置を基に、前記自動車が前記待ち合わせ場所に到着する車両到着予定時刻を推定し、前記車両到着予定時刻が前記待ち合わせ時刻以前であるか否かを判定し、
前記決定は、
前記車両到着予定時刻が前記待ち合わせ時刻以前でない場合、前記自動車が前記待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定する、
請求項1記載の管理方法。 - 前記自動車は、自動運転により前記ユーザの荷物を配送する自動運転配送車であり、
前記自動運転配送車は、前記駐車場で前記ユーザに荷物を引き渡す、
請求項3〜5のいずれかに記載の管理方法。 - 前記自動車は、自動運転により前記ユーザを輸送する自動運転輸送車であり、
前記自動運転輸送車は、前記駐車場で乗車した前記ユーザを輸送する、
請求項3〜5のいずれかに記載の管理方法。 - ユーザと自動車との待ち合わせを管理する管理装置であって、
前記ユーザの現在位置、及び待ち合わせ場所までの前記ユーザの移動方法を示すユーザ情報を取得する取得部と、
前記ユーザ情報を基に、前記ユーザが前記待ち合わせ場所に到着するユーザ到着予定時刻を推定し、前記ユーザ到着予定時刻が前記待ち合わせ場所での待ち合わせ時刻以前であるか否かを判定する判定部と、
前記ユーザ到着予定時刻が前記待ち合わせ時刻以前でないと判定された場合、前記ユーザ情報を基に、前記ユーザが前記待ち合わせ時刻までに到着可能な他の待ち合わせ場所を決定する決定部とを備える、
管理装置。 - 自動車と、
ユーザが使用するユーザ端末と、
請求項8記載の管理装置とを備える、
管理システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017149704A JP2019028862A (ja) | 2017-08-02 | 2017-08-02 | 管理方法、管理装置、及び管理システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017149704A JP2019028862A (ja) | 2017-08-02 | 2017-08-02 | 管理方法、管理装置、及び管理システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019028862A true JP2019028862A (ja) | 2019-02-21 |
Family
ID=65478610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017149704A Pending JP2019028862A (ja) | 2017-08-02 | 2017-08-02 | 管理方法、管理装置、及び管理システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019028862A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020171241A1 (ja) | 2019-02-20 | 2020-08-27 | キヤノン株式会社 | 画像形成装置 |
| JP2020160708A (ja) * | 2019-03-26 | 2020-10-01 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及び情報処理プログラム |
| JP2020198012A (ja) * | 2019-06-05 | 2020-12-10 | 本田技研工業株式会社 | 車両管理装置、および、車両管理方法 |
| CN112418463A (zh) * | 2019-08-20 | 2021-02-26 | 本田技研工业株式会社 | 配送管理装置、配送管理方法及存储介质 |
| JP2021085783A (ja) * | 2019-11-28 | 2021-06-03 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| JP6889320B1 (ja) * | 2020-09-09 | 2021-06-18 | 株式会社 日立産業制御ソリューションズ | 誘導装置、誘導方法及び誘導プログラム |
| JP7409275B2 (ja) | 2020-09-30 | 2024-01-09 | トヨタ自動車株式会社 | 情報処理装置、方法、及びプログラム |
| JP7477384B2 (ja) | 2020-07-21 | 2024-05-01 | 本田技研工業株式会社 | 配送管理装置および配送管理方法 |
-
2017
- 2017-08-02 JP JP2017149704A patent/JP2019028862A/ja active Pending
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020171241A1 (ja) | 2019-02-20 | 2020-08-27 | キヤノン株式会社 | 画像形成装置 |
| US11442453B2 (en) | 2019-03-26 | 2022-09-13 | Toyota Jidosha Kabushiki Kaisha | Information processing apparatus, information processing method and information processing program |
| JP2020160708A (ja) * | 2019-03-26 | 2020-10-01 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及び情報処理プログラム |
| JP7192606B2 (ja) | 2019-03-26 | 2022-12-20 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及び情報処理プログラム |
| JP2020198012A (ja) * | 2019-06-05 | 2020-12-10 | 本田技研工業株式会社 | 車両管理装置、および、車両管理方法 |
| CN112418463A (zh) * | 2019-08-20 | 2021-02-26 | 本田技研工业株式会社 | 配送管理装置、配送管理方法及存储介质 |
| JP7125378B2 (ja) | 2019-08-20 | 2022-08-24 | 本田技研工業株式会社 | 配送管理装置、配送管理方法、及びプログラム |
| JP2021033461A (ja) * | 2019-08-20 | 2021-03-01 | 本田技研工業株式会社 | 配送管理装置、配送管理方法、及びプログラム |
| JP2021085783A (ja) * | 2019-11-28 | 2021-06-03 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| JP7287254B2 (ja) | 2019-11-28 | 2023-06-06 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| JP7477384B2 (ja) | 2020-07-21 | 2024-05-01 | 本田技研工業株式会社 | 配送管理装置および配送管理方法 |
| JP6889320B1 (ja) * | 2020-09-09 | 2021-06-18 | 株式会社 日立産業制御ソリューションズ | 誘導装置、誘導方法及び誘導プログラム |
| JP2022045823A (ja) * | 2020-09-09 | 2022-03-22 | 株式会社 日立産業制御ソリューションズ | 誘導装置、誘導方法及び誘導プログラム |
| JP7409275B2 (ja) | 2020-09-30 | 2024-01-09 | トヨタ自動車株式会社 | 情報処理装置、方法、及びプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019028862A (ja) | 管理方法、管理装置、及び管理システム | |
| US10082793B1 (en) | Multi-mode transportation planning and scheduling | |
| US20190066251A1 (en) | System for navigating vehicles associated with a delivery service | |
| JP7059366B2 (ja) | 車両管理システム、車両管理装置、及び車両管理方法 | |
| US9552564B1 (en) | Autonomous delivery transportation network | |
| US11625649B2 (en) | Autonomous vehicle control using service pools across different service entities | |
| JP7192606B2 (ja) | 情報処理装置、情報処理方法、及び情報処理プログラム | |
| US20190354114A1 (en) | Selective Activation of Autonomous Vehicles | |
| US20210024100A1 (en) | Hybrid human/av driver system | |
| JPWO2018230692A1 (ja) | ライドシェア管理システム、ライドシェア管理方法、およびプログラム | |
| JP6673037B2 (ja) | オンデマンド客貨混載システム及び車載機 | |
| JP7242853B2 (ja) | 自律型車両のための複数の目的地への移動 | |
| JP2019168827A (ja) | 情報処理装置及びプログラム | |
| CN111461485A (zh) | 任务分配方法、装置、设备及计算机可读存储介质 | |
| CN111553501A (zh) | 一种订单分配方法及装置 | |
| JP6964617B2 (ja) | スケジュール管理システム、移動体、プログラム及び方法 | |
| CN111754803B (zh) | 信息处理装置、移动体、计算机可读记录介质以及方法 | |
| JP6439251B2 (ja) | 車両管理システム及び車両管理方法 | |
| JP7103261B2 (ja) | 配車装置および配車方法 | |
| US20220027800A1 (en) | Systems and methods for ridesharing with connected and unconnected passengers | |
| US20210278224A1 (en) | Coordinating trips by vehicles in an on-demand environment | |
| JP7215257B2 (ja) | 情報処理装置、情報処理方法、及び情報処理プログラム | |
| CN111459154A (zh) | 移动物体系统 | |
| US20220366369A1 (en) | Delivery fleet management | |
| JP2019003400A (ja) | 駐車場管理装置、駐車場管理方法、及び駐車場管理システム |