JP2017183665A - 基板搬送装置、基板処理装置及び基板処理方法 - Google Patents
基板搬送装置、基板処理装置及び基板処理方法 Download PDFInfo
- Publication number
- JP2017183665A JP2017183665A JP2016073092A JP2016073092A JP2017183665A JP 2017183665 A JP2017183665 A JP 2017183665A JP 2016073092 A JP2016073092 A JP 2016073092A JP 2016073092 A JP2016073092 A JP 2016073092A JP 2017183665 A JP2017183665 A JP 2017183665A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- processing
- unit
- claw
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000000758 substrate Substances 0.000 title claims abstract description 351
- 238000012545 processing Methods 0.000 title claims abstract description 164
- 238000003672 processing method Methods 0.000 title claims abstract description 6
- 238000012546 transfer Methods 0.000 claims abstract description 90
- 230000002093 peripheral effect Effects 0.000 claims abstract description 15
- 210000000078 claw Anatomy 0.000 claims description 87
- 230000003028 elevating effect Effects 0.000 claims description 23
- 238000003860 storage Methods 0.000 claims description 17
- 239000007788 liquid Substances 0.000 description 36
- 230000007246 mechanism Effects 0.000 description 15
- 230000032258 transport Effects 0.000 description 15
- 238000000034 method Methods 0.000 description 11
- 230000008569 process Effects 0.000 description 10
- 239000000356 contaminant Substances 0.000 description 4
- 238000004140 cleaning Methods 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000004904 shortening Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- FFBHFFJDDLITSX-UHFFFAOYSA-N benzyl N-[2-hydroxy-4-(3-oxomorpholin-4-yl)phenyl]carbamate Chemical compound OC1=C(NC(=O)OCC2=CC=CC=C2)C=CC(=C1)N1CCOCC1=O FFBHFFJDDLITSX-UHFFFAOYSA-N 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images









Classifications
-
- B60K35/28—
-
- B60K35/29—
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67161—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers
- H01L21/67173—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the layout of the process chambers in-line arrangement
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67184—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the presence of more than one transfer chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67748—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber horizontal transfer of a single workpiece
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67751—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber vertical transfer of a single workpiece
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67757—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber vertical transfer of a batch of workpieces
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67769—Storage means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
- H01L21/67781—Batch transfer of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68742—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by a lifting arrangement, e.g. lift pins
-
- B60K2360/167—
-
- B60K2360/182—
Abstract
Description
第1の実施形態について図1から図12を参照して説明する。
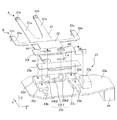
図1に示すように、第1の実施形態に係る基板処理装置10は、複数の開閉ユニット(収納部)11と、第1の搬送ロボット(基板搬送装置)12と、バッファユニット(収納部)13と、第2の搬送ロボット(基板搬送装置)14と、複数の基板処理部15と、装置付帯ユニット16とを備えている。
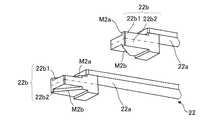
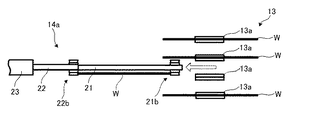
次に、前述の第2の搬送ロボット14について図2から図6を参照して説明する。なお、図3では、第2の搬送ロボット14の把持機構が見えるように示されている。
次に、第1のアームユニット14aについて詳しく説明する。
次に、前述の基板処理装置10が行う基板処理の流れについて説明する。なお、基板Wに対して2種類の処理を行う場合には、図1において、上下に延びる第2のロボット搬送路を挟んで左側の4つの処理室15a(以下、第1の処理室15aとすることがある)と、右側の4つの処理室15a(以下、第2の処理室15aとすることがある)が異なる処理を行うように設定されている。異なる処理を行う場合、第1の処理室は、第1の処理が行われる処理室であり、第2の処理室は、第1の処理の次の処理(第2の処理)が行われる処理室である。
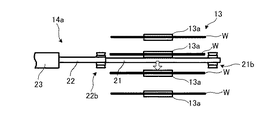
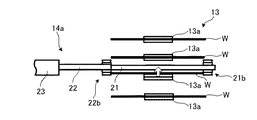
次いで、前述の基板処理工程において、第2の搬送ロボット14が行う基板搬送の流れについて図7から図12を参照して詳しく説明する。まず、第2の搬送ロボット14とバッファユニット13との基板Wの受け渡しについて説明する。
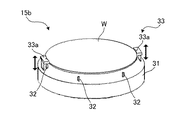
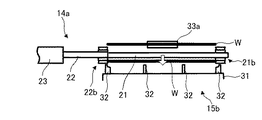
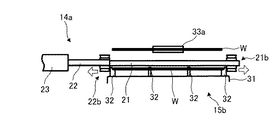
第2の実施形態について図13から図19を参照して説明する。なお、第2の実施形態では、第1の実施形態との相違点(基板昇降部)について説明し、その他の説明を省略する。
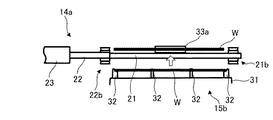
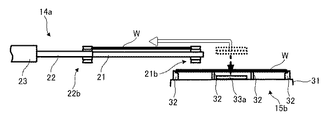
次に、第2の搬送ロボット14と処理室15aとの基板Wの受け渡しについて図14から図19を参照して説明する。
前述の各実施形態においては、上下のアームユニット14a、14bの両方に上下爪(第1の爪部21b及び第2の爪部22b)を適用することを例示したが、これに限るものではなく、例えば、上のアームユニット14aの片方だけに適用することも可能である。また、第1の爪部21b及び第2の爪部22bを同じ構造することも可能であり、第2の搬送ロボット14の構造を第1の搬送ロボット12に適用することも可能である。上下爪(第1の爪部21b及び第2の爪部22b)は二つ以上であればよく、その数は特に限定されるものではない。
11 開閉ユニット
12 第1の搬送ロボット
13 バッファユニット
14 第2の搬送ロボット
14d 昇降回転部
15 基板処理部
16b 制御ユニット
21 第1の把持板
21b 第1の爪部
22 第2の把持板
22b 第2の爪部
23 把持部
33 基板昇降部
21b1 上爪
21b2 下爪
M1a 当接面
M1b 当接面
M2a 当接面
M2b 当接面
W 基板
Claims (6)
- 第1の把持板と、
前記第1の把持板により支持され、基板の外周面に当接する当接面を前記第1の把持板の表面に対して上下に有する第1の爪部と、
前記第1の把持板に重なるように設けられた第2の把持板と、
前記第2の把持板により支持され、前記基板の外周面に当接する当接面を前記第1の把持板の表面に対して上下に有する第2の爪部と、
前記第1の爪部及び前記第2の爪部が前記基板の外周面に交わる方向に接離するように、前記第1の把持板及び前記第2の把持板を相対移動させる把持部と、
を備えることを特徴とする基板搬送装置。 - 前記第1の爪部は、
前記第1の把持板の上面に設けられ、前記当接面を有する上爪と、
前記第1の把持板の下面に設けられ、前記当接面を有する下爪と、
を有することを特徴とする請求項1に記載の基板搬送装置。 - 前記把持部を昇降させる昇降部と、
所定間隔で積層された複数の基板のうち第1の基板を把持する第1の高さ位置から、前記第1の基板の上又は下に位置する第2の基板を把持する第2の高さ位置に前記第1の爪部及び前記第2の爪部を位置付けるよう、前記昇降部に前記把持部の上昇又は下降を実行させ、前記把持部に前記第1の把持板及び前記第2の把持板の相対移動を実行させる制御部と、
をさらに備えることを特徴とする請求項1又は請求項2に記載の基板搬送装置。 - 複数の基板を所定間隔で積層して収納する収納部と、
請求項1から請求項3のいずれか一項に記載の基板搬送装置と、
前記基板を処理する基板処理部と、
を備えることを特徴とする基板処理装置。 - 前記基板処理部は、前記基板を昇降させる基板昇降部を有することを特徴とする請求項4に記載の基板処理装置。
- 複数の基板を所定間隔で積層して収納する収納部から、請求項1から請求項3のいずれか一項に記載の基板搬送装置を用いて第1の基板を取り出す工程と、
前記収納部から取り出された前記第1の基板に処理を行う工程と、
前記処理が行われた前記第1の基板を、前記基板搬送装置を用いて前記収納部に収納する工程と、
前記収納部に収納された前記第1の基板の上又は下に位置する第2の基板を、前記基板搬送装置を用いて前記収納部から取り出す工程と、
前記収納部から取り出された前記第2の基板に処理を行う工程と、
前記処理が行われた前記第2の基板を、前記基板搬送装置を用いて前記収納部に収納する工程と、
を有することを特徴とする基板処理方法。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016073092A JP2017183665A (ja) | 2016-03-31 | 2016-03-31 | 基板搬送装置、基板処理装置及び基板処理方法 |
| TW106107232A TWI685051B (zh) | 2016-03-31 | 2017-03-06 | 基板搬送裝置、基板處理裝置 |
| TW109101226A TWI796544B (zh) | 2016-03-31 | 2017-03-06 | 基板搬送裝置、基板處理方法及基板處理裝置 |
| KR1020170039109A KR101962009B1 (ko) | 2016-03-31 | 2017-03-28 | 기판 반송 장치, 기판 처리 장치 및 기판 처리 방법 |
| US15/472,671 US10483151B2 (en) | 2016-03-31 | 2017-03-29 | Substrate transfer apparatus, substrate processing apparatus, and substrate processing method |
| CN201710206582.2A CN107275270B (zh) | 2016-03-31 | 2017-03-31 | 基板输送装置、基板处理装置以及基板处理方法 |
| CN202110213053.1A CN112951750B (zh) | 2016-03-31 | 2017-03-31 | 基板输送装置、基板处理装置以及基板处理方法 |
| KR1020190030394A KR102227108B1 (ko) | 2016-03-31 | 2019-03-18 | 기판 반송 장치, 기판 처리 장치 및 기판 처리 방법 |
| JP2020113252A JP6970787B2 (ja) | 2016-03-31 | 2020-06-30 | 基板搬送装置及び基板処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016073092A JP2017183665A (ja) | 2016-03-31 | 2016-03-31 | 基板搬送装置、基板処理装置及び基板処理方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020113252A Division JP6970787B2 (ja) | 2016-03-31 | 2020-06-30 | 基板搬送装置及び基板処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017183665A true JP2017183665A (ja) | 2017-10-05 |
| JP2017183665A5 JP2017183665A5 (ja) | 2019-03-07 |
Family
ID=59961904
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016073092A Pending JP2017183665A (ja) | 2016-03-31 | 2016-03-31 | 基板搬送装置、基板処理装置及び基板処理方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10483151B2 (ja) |
| JP (1) | JP2017183665A (ja) |
| KR (2) | KR101962009B1 (ja) |
| CN (2) | CN112951750B (ja) |
| TW (2) | TWI685051B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021166218A (ja) * | 2020-04-06 | 2021-10-14 | 信越半導体株式会社 | ロボットハンド |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7023094B2 (ja) * | 2017-12-05 | 2022-02-21 | 日本電産サンキョー株式会社 | ロボット |
| CN111348427B (zh) * | 2020-03-13 | 2022-04-22 | 北京北方华创微电子装备有限公司 | 机械手 |
| CN117690858A (zh) * | 2024-02-02 | 2024-03-12 | 深圳市森美协尔科技有限公司 | 机械手组件及探针台 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5823742B2 (ja) | 1974-05-31 | 1983-05-17 | 松下電器産業株式会社 | キンゴウキンマクノ エツチングホウホウ |
| JPS5852615B2 (ja) | 1981-08-05 | 1983-11-24 | レオン自動機株式会社 | 生地の帯状連続吐出装置 |
| US5700046A (en) * | 1995-09-13 | 1997-12-23 | Silicon Valley Group, Inc. | Wafer gripper |
| JP3745064B2 (ja) * | 1997-01-23 | 2006-02-15 | 大日本スクリーン製造株式会社 | 基板搬送装置およびそれを用いた基板搬送方法ならびに基板姿勢変換装置 |
| US20020071756A1 (en) * | 2000-12-13 | 2002-06-13 | Gonzalez Jose R. | Dual wafer edge gripping end effector and method therefor |
| JP3958613B2 (ja) * | 2002-03-28 | 2007-08-15 | 大日本スクリーン製造株式会社 | 基板搬送方法、基板搬送装置および基板搬送アーム |
| TWI262165B (en) * | 2002-10-16 | 2006-09-21 | Sez Ag | Device and method for transporting wafer-shaped articles |
| JP2006313865A (ja) * | 2005-05-09 | 2006-11-16 | Tatsumo Kk | 基板保持装置 |
| CN1895974A (zh) * | 2005-07-15 | 2007-01-17 | 日本电产三协株式会社 | 基板搬出搬入方法及基板搬出搬入系统 |
| US9050634B2 (en) * | 2007-02-15 | 2015-06-09 | SCREEN Holdings Co., Ltd. | Substrate processing apparatus |
| JP4999487B2 (ja) * | 2007-02-15 | 2012-08-15 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| JP5548430B2 (ja) * | 2008-11-26 | 2014-07-16 | 株式会社日立国際電気 | 基板処理装置及び半導体装置の製造方法 |
| JP2010126797A (ja) * | 2008-11-28 | 2010-06-10 | Tokyo Electron Ltd | 成膜装置、半導体製造装置、これらに用いられるサセプタ、プログラム、およびコンピュータ可読記憶媒体 |
| JP5083339B2 (ja) * | 2010-02-04 | 2012-11-28 | 東京エレクトロン株式会社 | 基板搬送装置及び基板搬送方法並びに記憶媒体 |
| JP5823742B2 (ja) * | 2010-07-02 | 2015-11-25 | 芝浦メカトロニクス株式会社 | 把持装置、搬送装置、処理装置、および電子デバイスの製造方法 |
| JP5728770B2 (ja) * | 2011-02-03 | 2015-06-03 | 株式会社昭和真空 | 基板処理装置、基板処理方法、ならびに、プログラム |
| JP5709592B2 (ja) * | 2011-03-08 | 2015-04-30 | 東京エレクトロン株式会社 | 基板搬送方法、その基板搬送方法を実行させるためのプログラムを記録した記録媒体及び基板搬送装置 |
| KR101311616B1 (ko) * | 2011-08-12 | 2013-09-26 | 시바우라 메카트로닉스 가부시끼가이샤 | 처리 시스템 및 처리 방법 |
| JP5582152B2 (ja) * | 2012-02-03 | 2014-09-03 | 東京エレクトロン株式会社 | 基板搬送装置、基板搬送方法及び記憶媒体 |
| JP5993625B2 (ja) * | 2012-06-15 | 2016-09-14 | 株式会社Screenホールディングス | 基板反転装置、および、基板処理装置 |
| JP6091867B2 (ja) * | 2012-12-04 | 2017-03-08 | 株式会社ディスコ | 搬送機構 |
| JP2016127086A (ja) * | 2014-12-26 | 2016-07-11 | 東京エレクトロン株式会社 | 基板吸着補助部材及び基板搬送装置 |
| KR102066044B1 (ko) * | 2016-06-30 | 2020-02-11 | 세메스 주식회사 | 기판 처리 장치, 인덱스 로봇 및 기판 이송 방법 |
-
2016
- 2016-03-31 JP JP2016073092A patent/JP2017183665A/ja active Pending
-
2017
- 2017-03-06 TW TW106107232A patent/TWI685051B/zh active
- 2017-03-06 TW TW109101226A patent/TWI796544B/zh active
- 2017-03-28 KR KR1020170039109A patent/KR101962009B1/ko active IP Right Grant
- 2017-03-29 US US15/472,671 patent/US10483151B2/en active Active
- 2017-03-31 CN CN202110213053.1A patent/CN112951750B/zh active Active
- 2017-03-31 CN CN201710206582.2A patent/CN107275270B/zh active Active
-
2019
- 2019-03-18 KR KR1020190030394A patent/KR102227108B1/ko active IP Right Grant
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021166218A (ja) * | 2020-04-06 | 2021-10-14 | 信越半導体株式会社 | ロボットハンド |
| JP7287332B2 (ja) | 2020-04-06 | 2023-06-06 | 信越半導体株式会社 | ロボットハンド |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101962009B1 (ko) | 2019-03-25 |
| US10483151B2 (en) | 2019-11-19 |
| CN112951750A (zh) | 2021-06-11 |
| CN107275270A (zh) | 2017-10-20 |
| US20170287767A1 (en) | 2017-10-05 |
| KR20170113317A (ko) | 2017-10-12 |
| CN107275270B (zh) | 2021-03-09 |
| KR102227108B1 (ko) | 2021-03-15 |
| CN112951750B (zh) | 2024-02-27 |
| TWI796544B (zh) | 2023-03-21 |
| TWI685051B (zh) | 2020-02-11 |
| KR20190031462A (ko) | 2019-03-26 |
| TW201738995A (zh) | 2017-11-01 |
| TW202022976A (zh) | 2020-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102227108B1 (ko) | 기판 반송 장치, 기판 처리 장치 및 기판 처리 방법 | |
| JP7246147B2 (ja) | 基板処理装置及び基板処理方法 | |
| KR102429748B1 (ko) | 기판 처리 장치 | |
| KR20080061290A (ko) | 기판반송장치, 기판재치선반 및 기판처리장치 | |
| KR20100109357A (ko) | 기판처리장치 및 기판반송방법 | |
| CN107017182A (zh) | 基板处理设备 | |
| KR102164067B1 (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| JP2017183666A (ja) | 基板搬送装置、基板処理装置及び基板処理方法 | |
| KR102116344B1 (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| KR20200083233A (ko) | 기판 처리 장치 및 기판 반송 방법 | |
| JP5524304B2 (ja) | 基板処理装置における基板搬送方法 | |
| JP6970787B2 (ja) | 基板搬送装置及び基板処理装置 | |
| JP7137408B2 (ja) | 基板処理装置及び基板処理方法 | |
| JP6144236B2 (ja) | 基板処理方法、記憶媒体及び基板処理装置 | |
| JP5385965B2 (ja) | 基板処理装置 | |
| JP5283770B2 (ja) | 基板搬送装置およびこれを備えた基板処理装置 | |
| JP2008100802A (ja) | 基板保管庫 | |
| TWI529843B (zh) | 基板處理裝置 | |
| JP2005311169A (ja) | 基板搬送処理装置及び基板搬送処理方法 | |
| JP2013131529A (ja) | 基板処理装置及び半導体装置の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190123 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190924 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191125 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200331 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20200626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200630 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200630 |
|
| C11 | Written invitation by the commissioner to file amendments |
Free format text: JAPANESE INTERMEDIATE CODE: C11 Effective date: 20200714 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200813 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20200818 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20201009 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20201013 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20201124 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20210406 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20210511 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20210511 |