JP2017183666A - 基板搬送装置、基板処理装置及び基板処理方法 - Google Patents
基板搬送装置、基板処理装置及び基板処理方法 Download PDFInfo
- Publication number
- JP2017183666A JP2017183666A JP2016073093A JP2016073093A JP2017183666A JP 2017183666 A JP2017183666 A JP 2017183666A JP 2016073093 A JP2016073093 A JP 2016073093A JP 2016073093 A JP2016073093 A JP 2016073093A JP 2017183666 A JP2017183666 A JP 2017183666A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- unit
- processing
- rotation
- holding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Abstract
Description
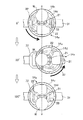
図1に示すように、第1の実施形態に係る基板処理装置10は、複数の開閉ユニット11と、第1の搬送ロボット12と、バッファユニット13と、第2の搬送ロボット14と、複数の基板処理部15と、装置付帯ユニット16とを備えている。なお、開閉ユニットやバッファユニットは基板収納部として機能し、第1の搬送ロボット12や第2の搬送ロボットは基板搬送装置として機能する。
次に、前述の第2の搬送ロボット14について説明する。
比較例では、図7に示すように、基板Wは、アーム部22の伸縮動作により水平な直線方向に移動するが、昇降回転部14dの回転動作(旋回動作)によって水平面内において湾曲な線形状に移動する。これは、昇降回転部14dが直線レール31に沿って移動できないため、ロボット回転軸(ロボット旋回軸)A1が固定され、ロボット回転軸A1とアームユニット14a、14bに保持された基板W中心との距離(旋回オフセット)が一定の距離を保ったまま基板Wが旋回しながら搬送されるためである。このような単純旋回方式によれば、基板Wが直線移動以外の湾曲移動を行うため、ハンド部21により把持された基板Wに作用する遠心力が大きくなる。このため、液盛り状態の基板W上から液が落下しやすく、基板表面が部分的に乾燥して基板品質が低下する。
図8には、アーム部22の伸縮時と昇降回転部14dの旋回動作時の基板W上の加速度が計算されて示されている。なお、図8の縦軸は、基板W上の液が受ける最大遠心力(G)であり、Gは、重力加速度を1Gとしたときの比率で記載されている。図8に示すように、アーム部22を伸ばした状態から戻す動作(移動600mm)、昇降回転部14dの旋回動作(180度旋回)、また、アーム部22を伸ばす動作(移動600mm)の3つの加速度変化が示されている。なお、アーム部22の旋回動作では、基板W(例えば、直径300mmの基板)の外周端に発生する遠心力が旋回オフセット量を160mmとして計算されている。
次に、前述の基板処理装置10が行う基板処理の流れについて説明する。なお、基板Wに対して2種類の処理を行う場合には、図1において、上下に延びる第2のロボット搬送路を挟んで左側の4つの処理室15a(以下、第1の処理室15aとすることがある)と、右側の4つの処理室15a(以下、第2の処理室15aとすることがある)が異なる処理を行うように設定されている。異なる処理を行う場合、第1の処理室は、第1の処理が行われる処理室であり、第2の処理室は、第1の処理の次の処理(第2の処理)が行われる処理室である。
前述の実施形態においては、二つのアームユニット14a、14bを保持する保持回転部として、昇降回転部14dを例示したが、これに限るものではなく、例えば、昇降機構を有していない保持回転部を用いることも可能であり、その機構は特に限定されるものではない。また、二つのアームユニット14a、14bを設けているが、その数は一つでも二つ以上でも良く、特に限定されるものではない。
14 第2の搬送ロボット
14a 第1のアームユニット
14d 昇降回転部
14e 移動機構
15 基板処理部
15a 処理室
31 直線レール
33 従動移動部
34 直線ガイドレール
35 直線ガイドブロック
36 回転部材
37 連結部材
W 基板
Claims (5)
- 基板を保持するアームユニットと、
前記アームユニットを保持し、鉛直方向に延びる軸を回転中心として回転する保持回転部と、
前記保持回転部を移動させる移動機構と、
を備え、
前記アームユニットは、前記保持回転部の回転軸から前記基板の中心をずらして前記基板を水平に保持し、
前記移動機構は、前記アームユニットにより水平に保持された前記基板を回しつつ水平な直線方向に搬送するよう、前記保持回転部の回転に応じて前記直線方向に交わる水平な方向に前記保持回転部を移動させることを特徴とする基板搬送装置。 - 前記移動機構は、前記基板の回転軸の移動軌跡と前記保持回転部の回転軸の移動軌跡が直交するように、前記保持回転部を移動させることを特徴とする請求項1に記載の基板搬送装置。
- 前記移動機構は、
前記直線方向に延びる直線ガイドレールと、
前記直線ガイドレール上に設けられ、前記直線ガイドレールに沿って移動する直線ガイドブロックと、
前記直線ガイドブロック上に設けられ、回転する回転部材と、
前記直線ガイドブロックが前記回転部材と共に前記保持回転部の回転に応じて前記直線ガイドレールに沿って移動するよう、前記回転部材と前記保持回転部を連結する連結部材と、
前記直線ガイドレールに直交する水平な方向に延びる直線レールと、
前記直線レール上に設けられて前記保持回転部に連結され、前記直線ガイドブロックの移動に応じて前記直線レールに沿って移動する従動移動部と、
を具備することを特徴とする請求項1又は請求項2に記載の基板搬送装置。 - 処理液による液膜を基板上に形成する第1の基板処理部と、
前記第1の基板処理部により前記液膜が表面に形成された基板を搬送する請求項1から請求項3のいずれか一項に記載の基板搬送装置と、
前記基板搬送装置により搬送された前記基板を処理する第2の基板処理部と、
を備えることを特徴とする基板処理装置。 - 請求項1から請求項3のいずれか一項に記載の基板搬送装置により、基板を処理するための第1の処理室から、処理液の液膜が表面に形成された基板を搬出する工程と、
前記搬出された基板を前記基板搬送装置により搬送する工程と、
前記基板を処理するための第2の処理室に、前記搬送された基板を前記基板搬送装置により搬入する工程と、
を有することを特徴とする基板処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016073093A JP6637362B2 (ja) | 2016-03-31 | 2016-03-31 | 基板搬送装置、基板処理装置及び基板処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016073093A JP6637362B2 (ja) | 2016-03-31 | 2016-03-31 | 基板搬送装置、基板処理装置及び基板処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017183666A true JP2017183666A (ja) | 2017-10-05 |
| JP6637362B2 JP6637362B2 (ja) | 2020-01-29 |
Family
ID=60007210
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016073093A Active JP6637362B2 (ja) | 2016-03-31 | 2016-03-31 | 基板搬送装置、基板処理装置及び基板処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6637362B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019197799A (ja) * | 2018-05-09 | 2019-11-14 | 芝浦メカトロニクス株式会社 | 基板把持装置、基板搬送装置及び基板搬送方法 |
| JP2020167184A (ja) * | 2019-03-28 | 2020-10-08 | 東京エレクトロン株式会社 | 基板処理装置および基板処理方法 |
| CN113508456A (zh) * | 2020-02-05 | 2021-10-15 | 株式会社安川电机 | 搬运系统、搬运方法以及搬运装置 |
| JP7304738B2 (ja) | 2019-05-17 | 2023-07-07 | 株式会社Screenホールディングス | 基板処理装置 |
| JP7313229B2 (ja) | 2019-08-07 | 2023-07-24 | ニデックインスツルメンツ株式会社 | 処理システム |
-
2016
- 2016-03-31 JP JP2016073093A patent/JP6637362B2/ja active Active
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019197799A (ja) * | 2018-05-09 | 2019-11-14 | 芝浦メカトロニクス株式会社 | 基板把持装置、基板搬送装置及び基板搬送方法 |
| JP7126856B2 (ja) | 2018-05-09 | 2022-08-29 | 芝浦メカトロニクス株式会社 | 基板把持装置、基板搬送装置及び基板搬送方法 |
| JP2020167184A (ja) * | 2019-03-28 | 2020-10-08 | 東京エレクトロン株式会社 | 基板処理装置および基板処理方法 |
| JP7253955B2 (ja) | 2019-03-28 | 2023-04-07 | 東京エレクトロン株式会社 | 基板処理装置および基板処理方法 |
| JP7304738B2 (ja) | 2019-05-17 | 2023-07-07 | 株式会社Screenホールディングス | 基板処理装置 |
| JP7313229B2 (ja) | 2019-08-07 | 2023-07-24 | ニデックインスツルメンツ株式会社 | 処理システム |
| CN113508456A (zh) * | 2020-02-05 | 2021-10-15 | 株式会社安川电机 | 搬运系统、搬运方法以及搬运装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6637362B2 (ja) | 2020-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017183666A (ja) | 基板搬送装置、基板処理装置及び基板処理方法 | |
| JP5139253B2 (ja) | 真空処理装置及び真空搬送装置 | |
| JP7246147B2 (ja) | 基板処理装置及び基板処理方法 | |
| KR101453189B1 (ko) | 반송 장치 | |
| JP5792981B2 (ja) | 板状部材反転システム及びその反転移送方法 | |
| KR101429827B1 (ko) | 반송 시스템 | |
| KR19980041847A (ko) | 기판 처리시스템 | |
| KR20160071463A (ko) | 기판 반송 장치 | |
| CN108701636A (zh) | 基板处理装置 | |
| JP2013165241A (ja) | 搬送装置 | |
| KR102227108B1 (ko) | 기판 반송 장치, 기판 처리 장치 및 기판 처리 방법 | |
| KR102164067B1 (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| KR102588614B1 (ko) | 산업용 로봇 및 제조 시스템 | |
| JP7412865B2 (ja) | 基板搬送ロボット、基板搬送システムおよび基板搬送方法 | |
| JP2014170828A (ja) | 基板搬送経路の決定方法、基板搬送装置、基板処理装置及びプログラム | |
| CN109585348A (zh) | 基板处理装置以及基板处理方法 | |
| JP2018085354A (ja) | 反転機、反転ユニット、反転方法および基板処理方法 | |
| JP4199432B2 (ja) | ロボット装置及び処理装置 | |
| JP2012056706A (ja) | 基板受渡装置及び基板受渡方法 | |
| JP2019021934A (ja) | 基板搬送方法 | |
| JP7137408B2 (ja) | 基板処理装置及び基板処理方法 | |
| KR102449001B1 (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| JP2020021794A (ja) | 搬送システム | |
| JP2010034219A (ja) | 基板処理ユニットおよび基板処理装置 | |
| JP2020178125A (ja) | 基板搬送装置、基板処理装置及び基板処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190328 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191217 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6637362 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |