JP2017161501A - 走行位置検出装置、走行位置検出方法 - Google Patents
走行位置検出装置、走行位置検出方法 Download PDFInfo
- Publication number
- JP2017161501A JP2017161501A JP2016250222A JP2016250222A JP2017161501A JP 2017161501 A JP2017161501 A JP 2017161501A JP 2016250222 A JP2016250222 A JP 2016250222A JP 2016250222 A JP2016250222 A JP 2016250222A JP 2017161501 A JP2017161501 A JP 2017161501A
- Authority
- JP
- Japan
- Prior art keywords
- road
- travel
- lane
- host vehicle
- traveling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3602—Input other than that of destination using image analysis, e.g. detection of road signs, lanes, buildings, real preceding vehicles using a camera
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3658—Lane guidance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
Abstract
【解決手段】地図上での道路の経路を表す経路情報と、道路上に表示された区画線についての情報である区画線情報とを含んだ地図情報を記憶しておく。そして、自車両から道路画像を撮影して区画線を抽出し、抽出した区画線の位置と区画線情報とを用いて、道路上での幅方向への位置を含めた自車両の走行位置を決定する。また、道路画像から区画線が抽出できなかった場合には、自車両の走行速度と、走行方向と、先に決定した走行位置とに基づいて、道路上での自車両の走行位置を推定する。こうすれば、道路上の区画線が検出できなくなった場合でも、走行中の車線を判別可能な位置精度で走行位置を決定することができる。
【選択図】図10
Description
更に、走行位置の検出精度を、走行中の車線が走行車線または追越車線の何れであるかを判別可能な程度まで高めることができれば、運転者に対して早めの車線変更を促すような、きめ細かな運転支援も可能となる。
ここで、推測航法とは、車両に搭載したセンサーを用いて時々刻々の移動距離および移動方向変化量を検出し、それらを累積することによって、ある時点で得られた基準位置からの相対位置を検出する手法である。また、マップマッチングとは、推測航法で得られた移動経路を、地図情報に記憶されている道路形状と照合することによって、地図上での車両の走行位置を特定する手法である。推測航法では、正確な基準位置が分からなければ正確な走行位置も決定することができず、更には、基準位置からの距離が遠くなるほど、走行位置の検出精度が低下する。また、マップマッチングは、移動経路の形状から走行位置を特定するので、いつでも特定できるとは限らない。これらの技術を組み合わせて用いることによって、何とか実用可能な精度を確保していることが現状であり、走行中の車線を判別可能な程度の位置精度を確保することは困難である。
こうすれば、道路画像から区画線を抽出できた場合は、走行中の車線を判別可能な位置精度で走行位置を決定することができる。また、道路画像から区画線を抽出できなかった場合でも、地図上での自車両の走行位置を推定することができる。地図上での走行位置を推定するに際しては、既に得られた走行位置を基準として、自車両の走行速度および走行方向に基づいて推定するので、走行中の車線を判別可能な位置精度を確保することができる。
A.装置構成 :
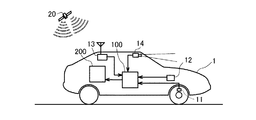
図1には、本実施例の走行位置検出装置100を搭載した自車両1の大まかな構成が示されている。図示されるように、自車両1には、走行位置検出装置100と共に、車速センサー11と、方位センサー12と、測位装置13と、車載カメラ14と、運転支援装置200などが搭載されている。
方位センサー12は、自車両1の走行方向に関するデータを出力するセンサーであり、ジャイロセンサーや地磁気センサーなどを用いることができる。例えば、ジャイロセンサーを方位センサー12として用いた場合には、自車両1の走行方向の変化量がジャイロセンサーから出力されるので、走行位置検出装置100は、この出力を累積することによって、自車両1の走行方向を検出することができる。また、方位センサー12として地磁気センサーを用いた場合は、地磁気の向きを基準として方位の情報が出力されるので、走行位置検出装置100は、この出力に基づいて自車両1の走行方向を検出することができる。
測位装置13は、測位衛星20からの測位信号を受信して、受信した測位信号を解析することによって、位置情報や速度情報などを含んだ測位結果を算出する。
車載カメラ14は、自車両1が走行している道路が写った画像(以下、道路画像)を一定周期(例えば30msec)で撮影して、走行位置検出装置100に出力する。
更に、走行位置検出装置100は、車載カメラ14で取得した道路画像を解析して、走行中の道路の車線を区切る区画線を抽出する。そして、抽出した区画線と、自車両1との位置関係に基づいて、走行中の道路上での幅方向への位置、あるいは走行車線を検出する。そして、検出した道路上での幅方向への位置、あるいは走行車線を、運転支援装置200に出力する。こうすれば、例えば、右左折前に予め車線変更を案内するなど、きめ細かな運転支援を実行することができる。
尚、本明細書中での区画線とは、道路の車線を区切る線であれば足り、必ずしも車線と車線とを区切る線である必要は無い。従って、例えば、細い農道や一方通行の路地などのように、単車線の道路の両側に存在する路側帯と車線とを区切る線も、本明細書の区画線に該当する。
そこで、本実施例の走行位置検出装置100は、何らかの理由で区画線が検出できなくなった場合でも、運転支援に支障を来すことが無いように、以下のような構成を採用している。
尚、これらの「部」は、本実施例の走行位置検出装置100が、道路上での走行位置を、道路の幅方向への位置も含めて決定するために備える機能に着目して、走行位置検出装置100の内部を便宜的に分類した抽象的な概念である。従って、走行位置検出装置100が物理的に区分されていることを表すものではない。また、これらの「部」は、CPUで実行されるコンピュータープログラムとして実現することもできるし、LSIを含む電子回路として実現することもできるし、更にはこれらの組合せとして実現することもできる。
走行方向検出部102は、方位センサー12の出力に基づいて自車両1の走行方位を取得した後、走行方向を経路位置決定部105に出力する。前述したように自車両1の走行方向は、方位センサー12がジャイロセンサーの場合はセンサーの出力を累積することによって求めることができ、方位センサー12が地磁気センサーの場合は、センサーの出力を換算することによって求めることができる。
測位結果取得部103は、測位装置13が測位衛星20からの測位信号に基づいて算出した自車両1位置の情報を測位装置13から受け取って、経路位置決定部105に出力する。
また、道路画像取得部107は、車載カメラ14から道路画像を取得して、得られた道路画像をオフセット位置検出部108に出力する。
オフセット位置検出部108は、道路画像を解析することによって、道路画像の中から区画線を抽出する。そして、区画線の抽出結果に基づいて、自車両1の区画線に対するオフセット位置を検出する。ここで、「オフセット位置」とは、自車両1から、道路の幅方向に向かって測った区画線までの距離である。
走行位置決定部106は、経路位置決定部105から自車両1の経路位置を取得すると、経路位置に対する地図情報を、地図情報記憶部104から取得する。詳細には後述するが、本実施例の地図情報記憶部104には、地図上での道路の経路を表す経路情報と、道路上に表示された区画線についての情報である区画線情報とが、地図情報として記憶されている。そして、走行位置決定部106は、自車両1の経路位置についての区画線情報と、自車両1の区画線に対するオフセット位置とに基づいて、道路上の幅方向の位置を含めた自車両1の走行位置を決定した後、決定した走行位置を運転支援装置200に出力する。
走行車線決定部109は、走行位置決定部106で決定した自車両1の走行位置(すなわち、経路位置、および道路上での幅方向の位置)に基づいて、自車両1が走行中の走行車線の位置を決定して、決定した走行車線を運転支援装置200に出力する。
尚、本実施例では、運転支援装置200に対しては、自車両1の走行位置および走行車線を出力するものとして説明するが、何れか一方を出力することとしても良い。
図3および4には、走行位置検出装置100によって実行される走行位置検出処理のフローチャートが示されている。
走行位置検出処理では、先ず、車速センサー11の出力に基づいて自車両1の走行速度を取得し、更に、方位センサー12の出力に基づいて自車両1の走行方向を取得する(S101)。
次に、測位装置13が測位信号に基づいて算出した自車両1の位置情報(以下、測位位置)を含む測位結果を、測位装置13から取得する(S102)。
また、前述したように、本実施例の地図情報には区画線情報も記憶されており、区画線情報を読み出すことによって、道路についてのより詳細な情報も取得することができる。例えば、区画線情報には、道路上に表示された区画線の有無や、区画線の位置や種類などの情報が含まれているので、道路の区画線情報を読み出すことで、その道路が単車線か複車線かといった情報も取得することができる。図5(a)では、一例として、複車線の道路については黒塗りで表示し、単車線の道路については白抜きして表示してある。
更に、図5(c)には、図5(a)中の白抜きで表示した道路についての区画線情報が概念的に示されている。この区画線情報によれば、図5(c)に示した位置の道路は、両側に路側帯との間が白い実線の区画線で区切られた単車線の道路であることが分かる。
このように区画線情報を読み出せば、道路上に表示された区画線についての詳細な情報を得ることができる。
そして、運転終了か否かを判断し(S113)、終了でないならば(S113:no)本実施例の走行位置検出処理の先頭に戻って、再び車速センサーおよび方位センサーの出力を取得する(図3のS101)。一方、運転を終了する場合は(S113:yes)、走行位置検出処理を終了する。
走行中の道路は複車線なので、道路画像中には車線と車線とを区切る区画線が写っている筈である。そこで、道路画像から区画線を抽出する(S107)。
こうして道路画像の中から区画線が写った部分を抽出すると、図6(b)に破線で示した画像を得ることができる。こうして得られた区画線は幅を有しているので、中心線を検出することによって、最終的に区画線を抽出する。図6(b)では、こうして最終的に抽出した区画線が一点鎖線で示されている。
図6(b)に示した例では、3つの車線を区切る2本の区画線と、それら3つの車線の左側の路側帯との間の区画線、および右側の中央分離帯との間の区画線が抽出されている。尚、以下では、これら区画線を識別する必要がある場合には、3つの車線を区切る2本の区画線を、左側からDL1,DL2と称し、左側の路側帯との間の区画線をDL3、右側の中央分離帯との間の区画線をDL4と称するものとする。
その結果、道路画像中の区画線が抽出されていた場合には(図3のS108:yes)、以下のようにして、区画線に対する自車両1のオフセット位置を検出する(S109)。ここで、区画線に対する自車両1のオフセット位置とは、自車両1から道路の幅方向に測った自車両1と区画線との距離である。
前述したように、道路画像を撮影する車載カメラ14は自車両1の前方に向けた状態で車体に固定されているから、道路画像には、自車両1から常に同じ範囲の画像が写っている。従って、自車両1の真正面にある被写体は、道路画像上では常に同じ直線上の何処かの位置に写っており、自車両1の前方の道路上で同じ距離にある被写体は、道路画像上では、画面の下端から同じ高さの位置に写っている。このことを利用すれば、道路画像上での区画線の位置に基づいて、区画線と自車両1との位置関係を求めることができる。
そして、自車両1の中心軸を示す矢印Pcから、左側の点DP1までの道路画像上での距離L1と、矢印Pcから右側の点DP2までの距離L2を検出する。更に、点DP1から点DP3までの道路画像上での距離Raと、点DP2から点DP4までの距離Rcとを検出する。
先ず、図7(a)に示す様に、道路画像上での道路幅(すなわち、左端の区画線DL3から右端の区画線DL4までの距離)は、Ra+L1+L2+Rcとなる。
更に、道路画像上での左端の区画線DL3から自車両1の中心までの距離はRa+L1となり、自車両1から右端の区画線DL4までの距離はL2+Rcとなる。
従って、道路画像上で画像の下端から所定高さの位置で求めた距離(すなわち、道路画像上での距離)に、変換係数K(=Wr/(Ra+L1+L2+Rc))を乗算すれば、実際の道路上での距離に換算することができる。
そして、道路画像上での左端の区画線DL3から自車両1の中心までの距離はRa+L1であるから、実際の道路上で自車両1は、道路の左端からK・(Ra+L1)の距離LDにいることになる。同様に、道路の右端からはK・(L2+Rc)の距離RDにいることになる。
更に、こうして算出した距離LD,RDと、区画線情報として記憶されている各車線の幅Wa,Wb,Wcとを比較すれば、自車両1が走行している走行車線を決定することも可能となる。
そして、上述したように、区画線情報に基づいて、実際の道路上での幅方向への自車両1の位置を決定する(S110)。前述したように、道路の幅を考えない場合の道路上の位置(すなわち、経路位置)は、S104で求めているから、結局、S110では、幅方向への位置も含めた道路上の走行位置を決定していることになる。
しかし、道路画像上で自車両1から左隣の区画線DL1までの距離L1と、自車両1から右隣の区画線DL2までの距離とを、それぞれオフセット位置として検出するものとしてもよい。そして、オフセット位置として得られた距離の和と、実際の車線幅Wrbとの比を算出することによって、変換係数Kを求めることとしてもよい。
図8には、道路上での走行軌跡を生成する様子が例示されている。図8(a)には、過去に生成された走行軌跡が、太い実線で示されている。また、図中に黒丸で示した位置C0は、最後に決定された走行位置を表している。
上述したように、図3のS110では、道路の両端を基準として道路上での新たな走行位置が決定されているから、最後に決定された走行位置と、新たな走行位置とを結ぶことで、図8(b)に示すように、新たな走行軌跡を生成することができる。そこで、図4のS111では、決定した走行位置を記憶することによって、新たな走行軌跡を生成する。
尚、ここでは、運転支援装置200に向かって走行位置を出力するものとして説明するが、簡易的には、走行位置の代わりに自車両1が走行中の走行車線を出力しても良い。すなわち、区画線情報には、複数の区画線の間の距離が記憶されているから、道路上での幅方向への位置を含めた走行位置が分かれば、自車両1が走行している走行車線を決定することができるので、走行位置の代わりに走行車線を出力することとしてもよい。
これに対して、運転を終了する場合は(S113:yes)、本実施例の走行位置検出処理を終了する。
これに対して、道路画像中で区画線を抽出できなかった場合には(S108:no)、上述した方法(すなわち、区画線に対するオフセット位置を用いる方法)では、自車両1の走行位置を決定することができず、従って、走行軌跡を生成することはできない。そこで、このような場合は、以下のような方法を用いて走行軌跡を生成する。
そして、自車両1の移動距離および移動方向に基づいて、走行位置(すなわち経路位置および道路上での幅方向への位置)を推定する(S115)。尚、前回の走行位置がS110で決定された位置ではなく、S115で推定された位置であった場合には、前回に推定した走行位置からの移動距離および移動方向を用いて、今回の走行位置を推定すればよい。
図9(a)中に示した太い実線は、既に得られている走行軌跡を表しており、走行軌跡の先端に黒丸で示した位置C0は、最後に記憶された前回の走行位置を表している。
この黒丸の位置C0から、現在の走行位置が、どちらの方向のどれだけ離れた位置に存在するかは分からないが、現在の走行速度および走行方向については分かっている。そこで、黒丸の位置C0からも、その走行速度および走行方向で移動したと仮定すれば、黒丸の位置C0(すなわち、前回の走行位置)から現在の走行位置までの移動距離および移動方向が推定できるので、現在の走行位置を推定することができる。
図9(b)中に示した太い破線は、このようにして、走行速度および走行方向に基づいて、新たな走行位置が推定されたことを表している。
図9(b)中で、自車両1の両側に示した破線の矢印は、自車両1から道路の両側に対するオフセット位置を推定していることを表している。
しかし、道路画像から区画線が抽出できた場合でも、その時点で取得されていた走行速度および走行方向を記憶しておいても良い。そして、道路画像から区画線が抽出できなかった場合には、その時点での走行速度および走行方向を用いる代わりに、前回の走行位置が得られた時の走行速度および走行方向を用いて、現在の走行位置を推定することとしても良い。
続いて、運転支援装置200に走行位置を出力した後(S112)、運転を終了するか否かを判断する(S113)。
その結果、運転を継続する場合は(S113:no)、走行位置検出処理の先頭に戻って、再び車速センサーおよび方位センサーの出力を取得する(図3のS101)。これに対して、運転を終了する場合は(S113:yes)、図3および4に示した走行位置検出処理を終了する。
ところが、位置(c)では、道路上の区画線が消えているため、道路画像から区画線を抽出することができない。そこで、先に走行位置を決定した位置(b)での走行位置を基準として、図中に斜線を付した矢印だけ移動した位置に自車両1が居るものと推定する。矢印の大きさおよび方向は、自車両1の走行速度および走行方向に基づいて決定することができる。こうして推定した自車両1の位置と、予め記憶されている地図情報(すなわち経路情報および区画線情報)とを組み合わせれば、図10中に破線の矢印で示したように、位置(c)での自車両1の走行位置を推定することができる。
その後、位置(e)および位置(f)では、道路画像から区画線を抽出することができるので、抽出した区画線に対するオフセット位置および区画線情報に基づいて、自車両1の道路上での走行位置を決定することができる。
しかし、図10に例示したように、走行位置の推定を開始する前までは、道路画像に基づいて正確な走行位置を決定しているので、暫くの距離であれば、推定した走行位置を基準として新たな走行位置を推定しても大きな誤差が蓄積されることはない。加えて、道路画像から区画線が抽出可能となれば、たとえ蓄積された誤差が大きくなっていたとしても、直ちに正しい走行位置を決定することができる。
このため、例えば、車載カメラ14が故障した状態で走行するなどのように、区画線が抽出できない状態が長い時間に亘って継続する事態が生じない限り、実際には、十分な精度で、道路上での自車両1の走行位置を決定あるいは推定することが可能となる。
そして、このように区画線を引くことができない領域では、道路画像から区画線を抽出して自車両1の走行位置を求めることは不可能である。
例えば、図11に示したように、道路上に区画線が描かれている領域では、道路画像から抽出した区画線を用いて走行位置を決定しながら走行する。そして、区画線が存在しない領域に入ったら、走行速度および走行方向や地図情報を用いて、自車両1の走行位置を推定しながら走行する。こうすれば、例えば図中に破線で示したように、自車両1を適切な料金ゲートへ誘導するような運転支援を行うことも可能となる。
上述した本実施例の走行位置検出装置100には、幾つかの変形例が存在する。以下では、これらの変形例について、本実施例との相違点を中心として簡単に説明する。尚、変形例についての説明では、本実施例と共通する部分については本実施例と同じ付番を付すことによって、説明を省略する。
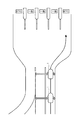
上述した本実施例では、自車両1から前方の道路画像を撮影することによって、自車両1から離れた位置にある区画線を抽出するものとして説明した。しかし、自車両1の周囲の道路画像を撮影して、得られた道路画像から区画線を抽出しても良い。
例えば、図12に例示した自車両1では、自車両1の周囲の道路画像を撮影する4つの車載カメラを備えている。このうち、自車両1の前方に搭載された前方車載カメラ14Fは、自車両1の前側の周囲領域AFでの道路を撮影しており、自車両1の後方に搭載された後方車載カメラ14Bは、自車両1の後側の周囲領域ABでの道路を撮影している。また、自車両1の左側方に搭載された左方車載カメラ14Lは、左側の周囲領域ALでの道路を撮影し、右側方に搭載された右方車載カメラ14Rは、右側の周囲領域ARでの道路を撮影している。
例えば、図12に示した自車両1は、2車線ある道路の右側の車線を走行しているが、この場合、前方車載カメラ14Fあるいは後方車載カメラ14Bの何れかの道路画像を解析すれば、道路中央の区画線DLCと、道路の右端の区画線DLRとを抽出することができる。あるいは、左方車載カメラ14Lの道路画像からは区画線DLCを抽出することができ、右方車載カメラ14Rの道路画像からは区画線DLRを抽出することができる。
これに対して、道路の左端の区画線DLLは何れの道路画像にも写っていないので、道路画像から抽出することはできない。
例えば、図13(a)に示したように、自車両1の左側では破線の区画線(すなわち、断続する区画線)が抽出され、自車両1の右側では実線の区画線(すなわち、連続した区画線)が抽出されていたとする。この場合、区画線情報として、例えば車線の本数が2本であり、中央の区画線は破線の区画線で、左右の区画線は実線の区画線である(図12参照)旨が記憶されていれば、この区画線情報に基づいて、道路上での走行位置を決定することができる。すなわち、自車両1の左側の区画線は破線の区画線であり、右側の区画線は実線の区画線であるから、区画線情報によれば、図13(b)に示すように、右側の車線を走行していると判断できる。
そして、右側の区画線DLRまでの距離L2は、道路画像から求められているので、この距離L2と区画線情報とを組み合わせて用いることで、自車両1の走行位置を決定することができる。例えば、区画線情報から道路幅Wrを取得すれば、道路の左端の区画線DLLまでの距離も、Wr−L2と算出することができる。
そして、左側の区画線DLLまでの距離L1は道路画像から求められているので、自車両1の走行位置を決定することができる。例えば、道路の右端の区画線DLRまでの距離も、Wr−L1によって算出することができる。
第1変形例の走行位置検出装置100では、オフセット位置検出部108は道路画像から区画線を抽出してオフセット位置を検出する際に、区画線の種類も検出して、得られたオフセット位置および区画線の種類を走行車線特定部110に出力する。
また、地図情報記憶部104には、区画線情報として区画線の種類も記憶されている。
走行車線特定部110は、受け取った区画線の種類と、地図情報記憶部104から読み出した区画線の種類とに基づいて、自車両1が走行中の走行車線を特定した後、走行位置決定部106および運転支援装置200に出力する。
走行位置決定部106は、前述した本実施例と同様に、経路位置決定部105から受け取った経路位置と、地図情報記憶部104から読み出した地図情報と、オフセット位置検出部108から受け取ったオフセット位置とに加えて、走行車線特定部110から受け取った走行車線も考慮して、道路上での走行位置を決定した後、運転支援装置200に出力する。
もちろん、こうして道路上での走行位置を決定することができれば、たとえ道路画像から区画線を抽出できない場合でも、前述した本実施例と同様にして、道路上での走行位置を推定することが可能となる。
更には、道路上に表示された文字や、図形、路面の塗装色などの情報も、区画線情報として記憶しておいてもよい。そして、道路画像からこれらの情報が抽出された場合には、これらの情報に基づいて、自車両1が走行中の車線を特定することとしてもよい。
上述した本実施例および第1変形例では、自車両1の走行速度や、走行方向、測位結果、地図情報を組み合わせて用いることで、自車両1の経路位置(すなわち、道路の幅方向を含めない位置)を十分な精度で決定できるものとして説明した。実際、自車両1が特徴的な形状の道路を走行している場合には、自車両1の走行速度や走行方向を累積して得られる走行軌跡を、道路の形状にマッチングさせることで、十分な精度で経路位置を決定することができる。
更に、自車両1の走行軌跡を道路の形状にマッチングさせる際の修正量から、決定した経路位置に含まれる誤差の大きさについての情報も得ることができる。例えば、自車両1の走行軌跡を道路の形状にマッチングさせる際の修正量が十分に小さかったとすると、マッチングを行わなくても実際には経路位置は大きく変わらない。このような場合は、十分な精度で経路位置が決定されており、従って、決定した経路位置に含まれる誤差は小さいと考えて良い。逆に、修正量が大きい場合には、マッチングによって何とか必要な精度を確保しているものの、決定した経路位置には、潜在的に大きな誤差が含まれていると考えられる。
加えて、自車両1の走行軌跡を道路の形状にマッチングさせるためには、道路の形状が特徴的でなければならないので、いつでもマッチングできるわけではない。従って、直線や緩やかなカーブが長距離に亘って継続するような状況では、形状に基づくマッチングによる位置の修正ができないまま走行する状態が継続することとなって、誤差は更に大きくなると考えられる。
また、上述したように、経路位置に含まれる誤差の大きさは増減するものであるが、たまたま誤差が大きくなっており、実際の自車両1は、図15(a)中に示されるように、直線部分が終わってカーブに差し掛かった所を走行していたとする。そして、このような状況下で、図中で破線の矢印で示したように、自車両1がカーブの途中まで直進して左側の車線に車線変更しようとしている場合を考える。
自車両1が更に直進して、図15(c)に示した状態になると、自車両1の左右に存在する区画線の情報からは、自車両1は道路の左側に大きく寄った位置を走行していることになる。従って、この情報に基づいて、自車両1の走行位置を決定すると、更に大きく左側に寄った位置に決定される。
図3を用いて前述したように、区画線が消えていると道路画像中の区画線を抽出できないから(S108:no)、自車両1の移動距離および移動方向に基づいて、道路上での走行位置を推定しながら走行することになる(S114、S115)。
図16(a)中に示した実線の矢印と、図16(b)中に示した破線の矢印とを比較すれば明らかなように、走行軌跡は正確な軌跡が生成されている。しかし、図16(b)に示されるように、走行軌跡から走行位置を推測すると、あたかも道路の中央を走行しているかのように誤って推測してしまう。
また、自車両1が大きなカーブを走行している場合にも、上述した問題は生じない。すなわち、図18に示した例でも、星印で示した自車両1の走行位置と、自車両1が実際に走行している位置とに大きなずれが生じているが、自車両1が左の車線に車線変更すると、星印で示した走行位置も左の車線に車線変更することになって、上述した問題は生じない。
ここで、道路の曲り形状とは、直線かカーブか、右カーブか左カーブか、大きなカーブか小さなカーブかといったように、道路が曲る態様を大雑把に分類したものである。例えば、直線かカーブかについては、道路の曲率半径が所定値以上であれば直線と判断し、それ以外はカーブと判断することができる。また、右カーブと左カーブとが連続している場合でも、それぞれのカーブの曲率半径が所定値以上の場合は、1つの直線と判断することができる。更には、2つのカーブが連続している場合、それらのカーブの曲率半径の差が所定の閾値以上であった場合に、それらは大きなカーブと小さなカーブとが連続しているものと判断することができる。道路の曲り形状とは、このようにして、道路の曲りの態様を大雑把に分類したものである。
そこで、第2変形例の走行位置検出装置100は、以下のようにして自車両1の走行位置を検出する。
第2変形例の走行位置検出処理でも、前述した本実施例と同様に、車速センサー11および方位センサー12の出力に基づいて、自車両1の走行速度および走行方向を取得する(S151)。続いて、測位装置13から、自車両1の測位位置を含む測位結果を取得する(S152)。更に、自車両1の測位位置に基づいて、自車両1の周辺の地図情報を取得する(S153)。
また、第2変形例の走行位置検出処理では、経路位置を決定するに際に、決定した経路位置に含まれる誤差の大きさについても取得しておく(S155)。すなわち、自車両1の走行速度や走行方向を累積して得られる走行軌跡を、道路の形状にマッチングさせる際に生じた経路位置の修正量から、経路位置に含まれる誤差の大きさを推定することができる。更に、前回にマッチングしてからの走行距離に基づいて、誤差の増加量も推定することができる。S155では、このような方法で、経路位置に含まれる誤差の大きさを求めておく。
これに対して、経路位置の道路が複車線の道路であった場合は(図19のS156:yes)、自車両1が走行している走行車線を踏まえて運転支援をことが望ましく、その為には、道路上での幅方向への位置を検出する必要が生じる。もちろん、自車両1の走行速度や、走行方向、測位結果、地図情報に基づいて決定した経路位置では、道路上での幅方向への位置までは分からないので、道路画像から抽出した区画線の位置に基づいて、幅方向への位置を決定することになる。
そこで、第2変形例の走行位置検出処理では、経路位置の誤差の範囲内で道路の曲り形状が変化しているか否かを判断する(S157)。経路位置の誤差の大きさは、S155で予め取得されている。また、地図情報も既にS153で取得してあるから、経路位置の誤差の範囲内で道路の曲り形状が変化しているか否かは容易に判断することができる。
例えば、図15に例示したような場合であれば、経路位置の道路は直線であるのに対して、経路位置の誤差の範囲内にはカーブの部分も存在しているから、道路の曲り形状が変化している。これに対して、例えば、図17あるいは図18に例示したような場合であれば、経路位置の誤差の範囲内では道路の曲り形状が変化していない。
その後、道路画像中の区画線を抽出できたか否かを判断し(図20のS160)、抽出できていた場合には(S160:yes)、前述した本実施例の走行位置検出処理と同様にして、区画線に対する自車両1のオフセット位置を検出する(S161)。そして、オフセット位置に基づいて、道路の幅方向への位置も含めた自車両1の走行位置を決定した後(S162)、決定した走行位置を用いて、道路上で自車両1の走行軌跡を生成する(S165)。
これに対して、経路位置の誤差の範囲内で道路の曲り形状が変化していると判断した場合には(S157:yes)、図15〜図18を用いて前述したように、道路画像から抽出した区画線に基づいて自車両1の走行位置を決定すると、経路位置の精度を更に低下させてしまう可能性がある。
そこで、この場合(S157:yes)には、道路画像を取得して、道路画像を解析し、区画線を抽出できたか否かを判断する一連の処理(S158〜S160)を行うことなく、自車両1の移動距離および移動方向を取得する(S163)。そして、自車両1の移動距離および移動方向に基づいて走行位置を推定して(S164)、推定した走行位置を用いて走行軌跡を生成する(S165)。
その後、運転を終了するか否かを判断し(S167)、終了しない場合は(S167:no)、走行位置検出処理の先頭に戻って、再び車速センサーおよび方位センサーの出力を取得した後(図19のS151)、前述した続く一連の処理を開始する。
これに対して、運転を終了する場合は(S167:yes)、第2変形例の走行位置検出処理を終了する。
上述した第2変形例では、経路位置の誤差の範囲内で道路の曲り形状が変化するような場合には、道路画像から抽出した区画線の情報を用いて、道路上での幅方向への位置を含めた走行位置を決定する代わりに、自車両1の移動距離および移動方向に基づいて走行位置を推定するものとして説明した。
しかし、経路位置の誤差の範囲内で道路の曲り形状が変化するような場合でも、道路画像から抽出した区画線の情報を用いて走行位置を決定することとして、その代わりに、決定した走行位置の信頼度が低下している旨の情報を、走行位置とともに出力するようにしてもよい。以下では、このような第3変形例について、第2変形例との相違点を中心として簡単に説明する。
第3変形例の走行位置検出処理でも、車速センサー11および方位センサー12の出力に基づいて、自車両1の走行速度および走行方向を取得し(S171)、測位装置13から自車両1の測位位置を含む測位結果を取得する(S172)。続いて、自車両1の周辺の地図情報を取得して(S173)、自車両1の地図上での経路位置を決定する(S174)。この際には、決定した経路位置に含まれる誤差の大きさについても取得しておく(S175)。
一方、道路が複車線の道路であった場合は(図21のS176:yes)、経路位置の誤差の範囲内で道路の曲り形状が変化しているか否かを判断する(S177)。
その結果、経路位置の誤差の範囲内では道路の曲り形状が変化していないと判断した場合は(S177:no)、走行位置の信頼度を「高」に設定する(S178)。これに対して、経路位置の誤差の範囲内では道路の曲り形状が変化していると判断した場合は(S177:yes)、走行位置の信頼度を「低」に設定する(S179)。
その後は、図3および図4を用いて前述した本実施例の走行位置検出処理と同様に、自車両1の周辺の道路画像を取得して(S180)、その道路画像を解析することによって区画線を抽出する(図22のS181)。すなわち、第3変形例では、経路位置の誤差の範囲内では道路の曲り形状が変化していると判断した場合(S177:yes)でも、道路画像中の区画線を抽出する。
これに対して、道路画像中の区画線を抽出できていなかった場合には(S182:no)、自車両1の移動距離および移動方向を取得して(S185)、道路の幅方向への位置も含めた自車両1の走行位置を推定する(S186)。そして、推定した走行位置を用いて、道路上で自車両1の走行軌跡を生成する(S187)。
その後、運転を終了するか否かを判断し(S189)、終了しない場合は(S189:no)、走行位置検出処理の先頭に戻って、再び車速センサーおよび方位センサーの出力を取得した後(図21のS171)、前述した続く一連の処理を開始する。
これに対して、運転を終了する場合は(S189:yes)、第3変形例の走行位置検出処理を終了する。
上述した第2変形例および第3変形例では、経路位置の誤差の範囲内で道路の曲り形状が変化するような場合には、道路画像から抽出した区画線の情報を用いることなく、自車両1の移動距離および移動方向に基づいて走行位置を推定するものとして説明した。
しかし、図15を用いた説明から明らかなように、道路画像から抽出した区画線の情報を用いて自車両1の走行位置を決定すると、却って、経路位置の精度を低下させてしまう現象が生じる状況では、決定した走行位置が示す自車両1の操舵角と、実際の操舵角との間に、ずれが生じることが分かる。例えば、図15に示した例では、自車両1は実際には直進しているにも拘わらず、区画線の情報を用いて決定した走行位置によれば、自車両1は左旋回していることになる。もちろん、これとは逆に、実際には左旋回(あるいは右旋回)しているにも拘わらず、区画線の情報を用いて決定した走行位置では、自車両1が直進していることも起こり得る。そして、このような状況では、区画線の情報を用いて自車両1の走行位置を決定することで、経路位置の精度を低下させる現象が生じると考えられる。
そこで、走行位置から推定される自車両1の操舵角と、自車両1の実際の操舵角との差が所定の閾値よりも大きくなった場合には、道路画像から抽出した区画線の情報を用いて走行位置を決定する代わりに、自車両1の移動距離および移動方向の情報に基づいて走行位置を推定するようにしてもよい。
操舵角取得部111は、自車両1の図示しないステアリングハンドルに装着された操舵角センサー15に接続されており、操舵角センサー15からの出力に基づいて、自車両1の実際の操舵角を取得する。また、取得した操舵角は、道路画像取得部107に出力する。
操舵角推定部112は、走行位置決定部106で決定した走行位置に基づいて、自車両1の操舵角を推定する。すなわち、走行位置から自車両1の走行軌跡を求めて、その走行軌跡の曲率を求めれば、自車両1の操舵角を推定することができる。また、推定した操舵角は、道路画像取得部107に出力する。
これに対して、両者の差が所定の閾値よりも大きかった場合には、道路画像を取得しない。従って、道路画像がオフセット位置検出部108に出力されることはなく、オフセット位置検出部108で、区画線に対する自車両1のオフセット位置が検出されることもない。
このため、道路画像から抽出した区画線の情報を用いて自車両1の走行位置を決定することで、経路位置の精度を低下させてしまう事態を回避することが可能となる。
こうすれば、本実施例の走行位置検出装置100に対して、新たに操舵角センサー15のデータを入力しなくても、第4変形例の走行位置検出装置100を実現することが可能となる。
13…測位装置、 14…車載カメラ、 15…操舵角センサー、
20…測位衛星、 100…走行位置検出装置、
101…走行速度検出部、 102…走行方向検出部、
103…測位結果取得部、 104…地図情報記憶部、
105…経路位置決定部、 106…走行位置決定部、
107…道路画像取得部、 108…オフセット位置検出部、
109…走行車線決定部、 110…走行車線特定部、
111…操舵角取得部、 112…操舵角推定部、
200…運転支援装置。
Claims (6)
- 複数の車線が区画線で区画された道路上で、自車両(1)が走行している走行位置を検出する走行位置検出装置(100)であって、
前記自車両に搭載された車速センサー(11)の出力に基づいて、前記自車両の走行速度を検出する走行速度検出部(101)と、
前記自車両に搭載された方位センサー(12)の出力に基づいて、前記自車両の走行方向を検出する走行方向検出部(102)と、
前記自車両に搭載された測位装置(13)が測位信号を受信することによって算出した測位結果を、前記測位装置から取得する測位結果取得部(103)と、
地図上での前記道路の経路を表す経路情報と、前記道路上に表示された前記区画線についての情報である区画線情報とを含んだ地図情報を記憶している地図情報記憶部(104)と、
前記走行速度と、前記走行方向と、前記測位結果とに基づいて、前記道路の経路上での位置である経路位置を決定する経路位置決定部(105)と、
前記自車両が走行している前記道路が写った道路画像を取得する道路画像取得部(106)と、
前記道路画像を解析して前記区画線を抽出することによって、前記区画線に対する前記自車両のオフセット位置を検出するオフセット位置検出部(107)と、
前記経路位置と、前記オフセット位置と、前記区画線情報とに基づいて、前記道路上での前記走行位置を決定する走行位置決定部(108)と
を備え、
前記走行位置決定部は、前記オフセット位置が検出されない場合には、前記走行速度と、前記走向方向と、既に決定された前記走行位置とに基づいて、前記走行位置を推定する
ことを特徴とする走行位置検出装置。 - 請求項1に記載の走行位置検出装置であって、
前記走行位置に基づいて、前記自車両が走行中の走行車線を決定する走行車線決定部(109)を備える
走行位置検出装置。 - 請求項1に記載の走行位置検出装置であって、
前記地図情報記憶部は、前記区画線情報として、前記区画線の種類についての情報も記憶しており、
前記オフセット位置検出部は、前記道路画像から前記区画線を抽出して前記オフセット位置を検出する際に、前記区画線の種類も検出しており、
前記区画線情報として記憶されている前記区画線の種類と、前記道路画像から検出された前記区画線の種類とを照合することによって、前記自車両が走行中の走行車線を決定する走行車線特定部(110)を備える
走行位置検出装置。 - 請求項1ないし請求項3の何れか一項に記載の走行位置検出装置であって、
前記道路画像取得部は、前記自車両の前記走行方向に向かって撮影された前記道路画像を取得する
ことを特徴とする走行位置検出装置。 - 請求項1ないし請求項3の何れか一項に記載の走行位置検出装置であって、
前記道路画像取得部は、前記自車両の左側の前記道路が撮影された前記道路画像と、前記自車両の右側の前記道路が撮影された前記道路画像とを取得しており、
前記オフセット位置検出部は、前記左側の前記道路画像および前記右側の前記道路画像を解析して前記区画線を抽出することによって、前記オフセット位置を検出する
ことを特徴とする走行位置検出装置。 - 複数の車線が区画線で区画された道路上で、自車両(1)が走行している走行位置を検出する走行位置検出方法であって、
前記自車両に搭載された車速センサーの出力に基づいて、前記自車両の走行速度を検出し、前記自車両に搭載された方位センサーの出力に基づいて、前記自車両の走行方向を検出する工程(S101)と、
前記自車両に搭載された測位装置が測位信号を受信することによって算出した測位結果を、前記測位装置から取得する工程(S102)と、
地図上での前記道路の経路を表す経路情報と、前記道路上に表示された前記区画線についての情報である区画線情報とを含んだ地図情報を読み出す工程(S103)と、
前記走行速度と、前記走行方向と、前記測位結果とに基づいて、前記道路の経路上での位置である経路位置を決定する工程(S104)と、
前記自車両が走行している前記道路が写った道路画像を取得する工程(S106)と、
前記道路画像を解析して前記区画線を抽出することによって、前記区画線に対する前記自車両のオフセット位置を検出する工程(S109)と、
前記経路位置と、前記オフセット位置と、前記区画線情報とに基づいて、前記道路上での前記走行位置を決定する工程(S110、S115)と
を備え、
前記走行位置を決定する工程は、前記オフセット位置が検出されない場合には、前記走行速度と、前記走向方向と、既に決定された前記走行位置とに基づいて、前記走行位置を推定する
ことを特徴とする走行位置検出方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/082,290 US10984551B2 (en) | 2016-03-07 | 2017-02-13 | Traveling position detection apparatus and traveling position detection method |
| PCT/JP2017/005059 WO2017154464A1 (ja) | 2016-03-07 | 2017-02-13 | 走行位置検出装置、走行位置検出方法 |
| DE112017001175.2T DE112017001175T5 (de) | 2016-03-07 | 2017-02-13 | Vorrichtung und Verfahren zur Erfassung einer Fahrposition |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016043963 | 2016-03-07 | ||
| JP2016043963 | 2016-03-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017161501A true JP2017161501A (ja) | 2017-09-14 |
| JP2017161501A5 JP2017161501A5 (ja) | 2018-06-07 |
Family
ID=59853964
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016250222A Pending JP2017161501A (ja) | 2016-03-07 | 2016-12-23 | 走行位置検出装置、走行位置検出方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10984551B2 (ja) |
| JP (1) | JP2017161501A (ja) |
| DE (1) | DE112017001175T5 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019075132A (ja) * | 2018-11-29 | 2019-05-16 | 株式会社ゼンリン | 走行支援装置、プログラム |
| KR20190069004A (ko) * | 2017-12-11 | 2019-06-19 | 현대오트론 주식회사 | 다차선 도로에서의 차선에 따른 예측 변속 제어 방법 |
| JP2019093957A (ja) * | 2017-11-24 | 2019-06-20 | トヨタ自動車株式会社 | 車両制御装置 |
| CN111033176A (zh) * | 2017-10-05 | 2020-04-17 | 丰田自动车株式会社 | 地图信息提供系统 |
| US11214250B2 (en) | 2017-04-27 | 2022-01-04 | Zenrin Co., Ltd. | Travel support device and non-transitory computer-readable medium |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180259961A1 (en) * | 2017-03-07 | 2018-09-13 | Delphi Technologies, Inc. | Lane-changing system for automated vehicles |
| KR102374916B1 (ko) * | 2017-09-29 | 2022-03-16 | 주식회사 만도모빌리티솔루션즈 | 차선 유지 제어장치 및 제어방법 |
| EP3570206B1 (en) * | 2018-05-15 | 2023-12-06 | Aptiv Technologies Limited | A device and a method for searching for a lane on which a vehicle can drive |
| CN112384760A (zh) * | 2018-05-15 | 2021-02-19 | 御眼视觉技术有限公司 | 用于自主车辆导航的系统和方法 |
| US11747166B2 (en) * | 2018-07-11 | 2023-09-05 | Nissan Motor Co., Ltd. | Driving environment information generation method, driving control method, driving environment information generation device |
| KR102034316B1 (ko) * | 2019-01-29 | 2019-11-08 | 주식회사 만도 | 차량 위치 보정 시스템 및 방법, 그리고 카메라 |
| CN109887310B (zh) * | 2019-03-25 | 2021-11-05 | 深圳市华士精成科技有限公司 | 一种基于有源rfid的车辆逆行判定方法 |
| WO2020223974A1 (zh) * | 2019-05-09 | 2020-11-12 | 珊口(深圳)智能科技有限公司 | 更新地图的方法及移动机器人 |
| JP7255345B2 (ja) * | 2019-05-13 | 2023-04-11 | スズキ株式会社 | 走行車線認識装置、走行車線認識方法およびプログラム |
| CN111523471B (zh) * | 2020-04-23 | 2023-08-04 | 阿波罗智联(北京)科技有限公司 | 车辆所在车道的确定方法、装置、设备以及存储介质 |
| JP7354952B2 (ja) * | 2020-07-14 | 2023-10-03 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| CN112541437A (zh) * | 2020-12-15 | 2021-03-23 | 北京百度网讯科技有限公司 | 车辆定位方法、装置、电子设备及存储介质 |
| JP7216699B2 (ja) * | 2020-12-28 | 2023-02-01 | 本田技研工業株式会社 | 車両制御システム及び自車線特定方法 |
| KR20220114750A (ko) * | 2021-02-09 | 2022-08-17 | 현대모비스 주식회사 | 차선 인식 시스템 및 제어 방법 |
| JP7256216B2 (ja) * | 2021-02-25 | 2023-04-11 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN116256780B (zh) * | 2023-05-16 | 2023-09-08 | 智道网联科技(北京)有限公司 | 高架桥区域的车辆定位方法、装置及电子设备、存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10247300A (ja) * | 1997-03-05 | 1998-09-14 | Toyota Motor Corp | 走路境界線認識装置 |
| JP2005265494A (ja) * | 2004-03-17 | 2005-09-29 | Hitachi Ltd | 車両位置推定装置およびこれを用いた運転支援装置 |
| JP2007304965A (ja) * | 2006-05-12 | 2007-11-22 | Mitsubishi Electric Corp | 画像処理装置 |
| WO2008107944A1 (ja) * | 2007-03-01 | 2008-09-12 | Pioneer Corporation | 車線逸脱防止装置、車線逸脱防止方法、車線逸脱防止プログラム及び記憶媒体 |
| JP2009140192A (ja) * | 2007-12-05 | 2009-06-25 | Zhencheng Hu | 道路白線検出方法、道路白線検出プログラムおよび道路白線検出装置 |
| JP2009237901A (ja) * | 2008-03-27 | 2009-10-15 | Zenrin Co Ltd | 路面標示地図生成方法 |
| JP2013234902A (ja) * | 2012-05-08 | 2013-11-21 | Alpine Electronics Inc | 走行レーン認識装置および走行レーン認識方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1040379A (ja) | 1996-07-22 | 1998-02-13 | Toyota Motor Corp | 走路検出装置 |
| JP2001250199A (ja) | 2000-03-07 | 2001-09-14 | Toyota Central Res & Dev Lab Inc | 走行コース推定装置 |
| JP4392389B2 (ja) | 2005-06-27 | 2009-12-24 | 本田技研工業株式会社 | 車両及び車線認識装置 |
| JP4889272B2 (ja) * | 2005-09-30 | 2012-03-07 | アルパイン株式会社 | ナビゲーション装置及び車両位置推定方法 |
| JP4861850B2 (ja) * | 2007-02-13 | 2012-01-25 | アイシン・エィ・ダブリュ株式会社 | レーン判定装置及びレーン判定方法 |
| US8363104B2 (en) * | 2008-09-25 | 2013-01-29 | Clarion Co., Ltd. | Lane determining device and navigation system |
| JP4832489B2 (ja) | 2008-09-25 | 2011-12-07 | クラリオン株式会社 | 車線判定装置 |
| JP4876147B2 (ja) | 2009-06-30 | 2012-02-15 | クラリオン株式会社 | 車線判定装置及びナビゲーションシステム |
| KR101252015B1 (ko) * | 2012-08-16 | 2013-04-09 | 주식회사 피엘케이 테크놀로지 | 차량의 경로 변경을 판정하는 내비게이션 시스템 |
-
2016
- 2016-12-23 JP JP2016250222A patent/JP2017161501A/ja active Pending
-
2017
- 2017-02-13 DE DE112017001175.2T patent/DE112017001175T5/de active Pending
- 2017-02-13 US US16/082,290 patent/US10984551B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10247300A (ja) * | 1997-03-05 | 1998-09-14 | Toyota Motor Corp | 走路境界線認識装置 |
| JP2005265494A (ja) * | 2004-03-17 | 2005-09-29 | Hitachi Ltd | 車両位置推定装置およびこれを用いた運転支援装置 |
| JP2007304965A (ja) * | 2006-05-12 | 2007-11-22 | Mitsubishi Electric Corp | 画像処理装置 |
| WO2008107944A1 (ja) * | 2007-03-01 | 2008-09-12 | Pioneer Corporation | 車線逸脱防止装置、車線逸脱防止方法、車線逸脱防止プログラム及び記憶媒体 |
| JP2009140192A (ja) * | 2007-12-05 | 2009-06-25 | Zhencheng Hu | 道路白線検出方法、道路白線検出プログラムおよび道路白線検出装置 |
| JP2009237901A (ja) * | 2008-03-27 | 2009-10-15 | Zenrin Co Ltd | 路面標示地図生成方法 |
| JP2013234902A (ja) * | 2012-05-08 | 2013-11-21 | Alpine Electronics Inc | 走行レーン認識装置および走行レーン認識方法 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11214250B2 (en) | 2017-04-27 | 2022-01-04 | Zenrin Co., Ltd. | Travel support device and non-transitory computer-readable medium |
| CN111033176A (zh) * | 2017-10-05 | 2020-04-17 | 丰田自动车株式会社 | 地图信息提供系统 |
| CN111033176B (zh) * | 2017-10-05 | 2023-08-25 | 丰田自动车株式会社 | 地图信息提供系统 |
| JP2019093957A (ja) * | 2017-11-24 | 2019-06-20 | トヨタ自動車株式会社 | 車両制御装置 |
| CN109991603A (zh) * | 2017-11-24 | 2019-07-09 | 丰田自动车株式会社 | 车辆控制装置 |
| KR20190069004A (ko) * | 2017-12-11 | 2019-06-19 | 현대오트론 주식회사 | 다차선 도로에서의 차선에 따른 예측 변속 제어 방법 |
| KR101997715B1 (ko) | 2017-12-11 | 2019-07-09 | 현대오트론 주식회사 | 다차선 도로에서의 차선에 따른 예측 변속 제어 방법 |
| JP2019075132A (ja) * | 2018-11-29 | 2019-05-16 | 株式会社ゼンリン | 走行支援装置、プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US10984551B2 (en) | 2021-04-20 |
| DE112017001175T5 (de) | 2018-11-15 |
| US20190035110A1 (en) | 2019-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017161501A (ja) | 走行位置検出装置、走行位置検出方法 | |
| US20220146276A1 (en) | Using mapped lane width to determine navigational parameters | |
| JP4506790B2 (ja) | 道路情報生成装置、道路情報生成方法および道路情報生成プログラム | |
| US8112222B2 (en) | Lane determining device, method, and program | |
| US20060233424A1 (en) | Vehicle position recognizing device and vehicle position recognizing method | |
| JP4446204B2 (ja) | 車両用ナビゲーション装置及び車両用ナビゲーションプログラム | |
| KR101919366B1 (ko) | 차량 내부 네트워크 및 영상 센서를 이용한 차량 위치 인식 장치 및 그 방법 | |
| JP2020064046A (ja) | 車両位置決定方法及び車両位置決定装置 | |
| JP3596314B2 (ja) | 物体端の位置計測装置および移動体の通行判断装置 | |
| US9123242B2 (en) | Pavement marker recognition device, pavement marker recognition method and pavement marker recognition program | |
| JP4761156B2 (ja) | 地物位置認識装置及び地物位置認識方法 | |
| CN110287779A (zh) | 车道线的检测方法、装置及设备 | |
| JP2008168811A (ja) | 車線認識装置、車両、車線認識方法、及び車線認識プログラム | |
| US11468691B2 (en) | Traveling lane recognition apparatus and traveling lane recognition method | |
| JP4975350B2 (ja) | 車載用ナビゲーション装置 | |
| JP5141969B2 (ja) | 画像認識装置及び画像認識プログラム、並びにそれを用いた地点情報収集装置及びナビゲーション装置 | |
| JP2005004442A (ja) | 走行車線判別装置 | |
| JP2020067698A (ja) | 区画線検出装置及び区画線検出方法 | |
| JP2008165326A (ja) | 地物認識装置・自車位置認識装置・ナビゲーション装置・地物認識方法 | |
| JP4731380B2 (ja) | 自車位置認識装置及び自車位置認識方法 | |
| WO2017154464A1 (ja) | 走行位置検出装置、走行位置検出方法 | |
| JP5974923B2 (ja) | 道路端検出システム、方法およびプログラム | |
| TWI665114B (zh) | 車輛行駛偵測方法及車輛行駛偵測系統 | |
| JPH10300494A (ja) | 車輌位置検出装置および方法ならびに経路案内装置および方法 | |
| JP2022011887A (ja) | 走行予定経路設定装置及び走行予定経路設定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180419 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190812 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200204 |