JP2017123702A - インバータ制御装置およびそれを搭載したモータ駆動装置及び電動パワーステアリング装置 - Google Patents
インバータ制御装置およびそれを搭載したモータ駆動装置及び電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP2017123702A JP2017123702A JP2016000328A JP2016000328A JP2017123702A JP 2017123702 A JP2017123702 A JP 2017123702A JP 2016000328 A JP2016000328 A JP 2016000328A JP 2016000328 A JP2016000328 A JP 2016000328A JP 2017123702 A JP2017123702 A JP 2017123702A
- Authority
- JP
- Japan
- Prior art keywords
- inverter
- current
- phase
- voltage command
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000001514 detection method Methods 0.000 claims abstract description 62
- 238000004804 winding Methods 0.000 claims description 31
- 230000005856 abnormality Effects 0.000 claims description 28
- 230000004043 responsiveness Effects 0.000 abstract 1
- 238000000034 method Methods 0.000 description 76
- 238000006243 chemical reaction Methods 0.000 description 24
- 238000010586 diagram Methods 0.000 description 22
- 101100208381 Caenorhabditis elegans tth-1 gene Proteins 0.000 description 6
- 230000014509 gene expression Effects 0.000 description 6
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000005669 field effect Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000002250 progressing effect Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
Images























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/493—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode the static converters being arranged for operation in parallel
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0475—Controlling other elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
- H02P27/12—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation pulsing by guiding the flux vector, current vector or voltage vector on a circle or a closed curve, e.g. for direct torque control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
- H02P29/028—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load the motor continuing operation despite the fault condition, e.g. eliminating, compensating for or remedying the fault
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
Abstract
本発明は、電流制御(トルク制御)の応答性を低下させることなく制御装置の演算負荷を低減することを目的とする。
【解決手段】
少なくとも第1のインバータと第2のインバータとを有するインバータ制御装置であって、前記第1のインバータの主回路を流れる電流を検出する電流検出部と、検出した電流と電流指令に基づいて前記第1のインバータの電圧指令値を生成する電流制御部と、前記第1のインバータの電圧指令値の変化分に基づいて前記第2のインバータの電圧指令値を生成する電圧指令予測部と、を備えるインバータ制御装置。
【選択図】 図14(b)
Description
図1(a)は、実施例1にかかる電動パワーステアリング装置を説明する図である。
図1(b)を用いて、制御装置280の構成および処理内容について説明する。制御装置280は、キャリア生成部290、3相交流電流算出部300、3相/dq変換部310、電流制御部320、電流指令生成部330、電圧指令予測部340、dq/3相変換部350、360、PWM変調部370、380を有する。図1(a)に示されるように、制御装置280には、シャント抵抗90と増幅器100で検出した第1の直流母線電流IdcAと、角度センサ190で検出したモータ110の回転子の磁極位置θと、トルクセンサ230で検出したステアリング240からロッド220に伝達されたトルクTsと、が入力される。
図2は、3相交流電流算出部300の処理手順を説明する図である。図1(b)で前述の通り、3相交流電流算出部300は、三角波キャリアCarrierと第1の3相交流電圧指令vuA*、vvA*、vwA*との関係に基づいて決定されたタイミングで、第1のインバータ20に流れる第1の直流母線電流IdcAを取得し、当該取得した第1の直流母線電流IdcAに基づいて第1の3相交流電流iuA、ivA、iwAを算出する。
図5は、3相/dq変換部310が第1のd軸電流idAとq軸電流iqAとを算出する処理手順を説明する図である。

図6は、電流指令生成部330が第1のd軸電流指令idA*とq軸電流指令iqA*とを生成する処理手順を説明する図である。
図8は、電流制御部320が第1のd軸電圧指令vdA*とq軸電圧指令vqA*を生成する処理手順を説明する図である。
図9は、dq/3相変換部350が第1の3相交流電圧指令vuA*、vvA*、vwA*を演算する処理手順を説明する図である。
図10は、PWM変調部370が第1のインバータ20の各相上下アームの第1のPWM信号SupA、SunA、SvpA、SvnA、SwpA、SwnAを生成する処理手順を説明する図である。
ゲートドライブ回路390は、PWM変調部370で生成した第1の各相上下アームのPWM信号SupA〜SwnAの電圧を増幅し、第1のインバータ20の各相上下アームのスイッチング素子30〜80のゲートに入力する。
図11は、実施例1にかかる電圧指令予測部340が第1のd軸電圧指令vdA*とq軸電圧指令vqA*に基づいて、第2のd軸電圧指令vdB*とq軸電圧指令vqB*を予測する処理手順を説明する図である。
図12は、dq/3相変換部360が第2のd軸電圧指令vdB*とq軸電圧指令vqB*に基づいて、第2の3相交流電圧指令vuB*、vvB*、vwB*を生成する処理手順を説明する図である。基本的な動作は、図9で説明したdq/3相変換部350の動作と同様で、ステップh−1で取得した第2のd−q軸電圧指令vdB*、vqB*とステップh−2で取得したモータ110の回転子の磁極位置θを(17)式に代入し、第2の3相交流電圧指令vuB*、vvB*、vwB*が算出される。
図13は、PWM変調部380が第2のインバータ20の各相上下アームの第2のPWM信号SupB、SunB、SvpB、SvnB、SwpB、SwnBを生成する処理手順を説明する図である。基本的な考え方は図10において説明した手順と同様であるため、ここでは詳細な説明は省略する。
ゲートドライブ回路400は、PWM変調部380で生成した第2の各相上下アームのPWM信号SupB〜SwnBの電圧を増幅し、第2のインバータ120の各相上下アームのスイッチング素子130〜180のゲートに入力する。
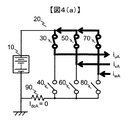
図14(a)は、実施例2にかかる電動パワーステアリング装置を説明する図である。
図14(b)を用いて、実施例2にかかる制御装置280の構成および処理内容について説明する。制御装置280は、検出電流選択部285、キャリア生成部290、異常検出部295、3相交流電流算出部300、3相/dq変換部310、電流制御部320、電流指令生成部330、電圧指令予測部340、dq/3相変換部350、360、PWM変調部370、380を有する。
検出電流選択部285は、前述したように、第1の直流母線電流IdcAと第2の直流母線電流IdcBのどちらか一方を所定のタイミングで順次入れ替えて選択する。そして、検出電流選択部285は、第1の直流母線電流IdcAもしくは第2の直流母線電流IdcBのどちらか一方を1系統分の直流母線電流Idcとして設定する。
図15は、実施例2にかかる3相交流電流算出部300の処理手順を説明する図である。前述の通り、3相交流電流算出部300は、第1の直流母線電流IdcAまたは第2の直流母線電流IdcBのいずれかに基づいて1系統分の3相交流電流iu、iv、iwを算出する。
図16は、異常検出部295が直流母線電流と3相交流電流に基づき、系統の異常(地絡や過電流)の有無を判定する処理手順を説明する図である。
図18は、実施例2にかかる電圧指令予測部340が第1のd−q軸電圧指令vdA*、vqA*および第2のd−q軸電圧指令vdB*、vqB*を算出する処理手順を説明する図である。
図19は、実施例2にかかるPWM変調部370の処理手順を説明する図である。
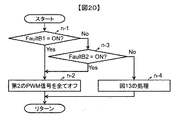
図20は、実施例2にかかるPWM変調部380の処理手順を説明する図である。図20における処理手順は、図19の処理手順とほぼ同様であるので、ここでは詳細な説明は省略する。
Claims (11)
- 少なくとも第1のインバータと第2のインバータとを有するインバータ制御装置であって、
前記第1のインバータの主回路を流れる電流を検出する電流検出部と、
検出した電流と電流指令に基づいて前記第1のインバータの電圧指令値を生成する電流制御部と、
前記第1のインバータの電圧指令値の変化分に基づいて前記第2のインバータの電圧指令値を生成する電圧指令予測部と、を備えるインバータ制御装置。 - 請求項1に記載のインバータ制御装置であって、
前記電流検出部は、前記第1のインバータの主回路を流れる電流と、前記第2のインバータの主回路を流れる電流と、を順次切り替えて検出し、
前記電流制御部は、前記第1のインバータの電流検出期間において、当該検出した電流と所定の電流指令に基づいて前記第1のインバータの電圧指令値を生成し、
前記電圧指令予測部は、前記第1のインバータの電流検出期間における前記第2のインバータの電圧指令値を、前記第2のインバータの過去の電圧指令値に前記第1のインバータの電圧指令値の変化分を加算することにより、生成することを特徴とするインバータ制御装置。 - 請求項2に記載のインバータ制御装置であって、
前記電流制御部は、前記第2のインバータの電流検出期間においては、当該検出した電流と所定の電流指令に基づいて前記第2のインバータの電圧指令値を生成し、
前記電圧指令予測部は、前記第2のインバータの電流検出期間における前記第1のインバータの電圧指令値を、前記第1のインバータの過去の電圧指令値に前記第2のインバータの電圧指令値の変化分を加算することにより、生成することを特徴とするインバータ制御装置。 - 請求項1から3の何れかに記載のインバータ制御装置であって、
前記電流検出部は、前記第1のインバータの直流母線に流れる直流母線電流を検出することを特徴とするインバータ制御装置。 - 請求項1から3の何れかに記載のインバータ制御装置であって、
前記電流検出部は、前記第1のインバータの各相下アーム又は上アームと直流母線との間に流れる電流を検出することを特徴とするインバータ制御装置。 - 請求項1から3の何れかに記載のインバータ制御装置であって、
前記電流検出部は、前記第1のインバータの3相交流出力線に流れる電流を検出することを特徴とするインバータ制御装置。 - 請求項1から6のいずれかに記載のインバータ制御装置であって、
前記電流検出部によって検出された電流に基づいて前記第1のインバータの異常を検出する異常検出部を備えたことを特徴とするインバータ制御装置。 - 請求項7に記載のインバータ制御装置であって、
前記異常検出部は、前記第1のインバータの各相下アームが全てオンの時に検出した前記第1のインバータの直流母線電流が所定の閾値よりも大きい場合には、前記第1のインバータの各相上下アームのスイッチングを全て停止(オフ)させることを特徴とするインバータ制御装置。 - 請求項7または8に記載のインバータ制御装置であって、
前記異常検出部は、前記第1のインバータの3相交流電流が所定の閾値よりも大きい場合には、前記第1のインバータの各相上下アームのスイッチングを全て停止(オフ)させることを特徴とするインバータ制御装置。 - 請求項1から9の何れかに記載のインバータ制御装置と、
前記第1のインバータに接続される第1の巻線と、前記第2のインバータに接続される第2の巻線と、前記第1の巻線及び前記第2の巻線が巻回される固定子と、を有するモータと、を備えたモータ駆動装置。 - 請求項10に記載のモータ駆動装置を搭載した電動パワーステアリング装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016000328A JP2017123702A (ja) | 2016-01-05 | 2016-01-05 | インバータ制御装置およびそれを搭載したモータ駆動装置及び電動パワーステアリング装置 |
| KR1020187017481A KR102111444B1 (ko) | 2016-01-05 | 2016-11-22 | 인버터 제어 장치, 모터 구동 장치 및 전동 파워 스티어링 장치 |
| DE112016005068.2T DE112016005068T5 (de) | 2016-01-05 | 2016-11-22 | Wechselrichtersteuervorrichtung, Motorantriebsvorrichtung und elektrische Lenkhilfevorrichtung |
| CN201680072438.8A CN108476010B (zh) | 2016-01-05 | 2016-11-22 | 逆变器控制装置、马达驱动装置以及电动动力转向装置 |
| US16/068,062 US10924048B2 (en) | 2016-01-05 | 2016-11-22 | Inverter control device, motor drive device, and electric power steering apparatus |
| PCT/JP2016/084619 WO2017119201A1 (ja) | 2016-01-05 | 2016-11-22 | インバータ制御装置、モータ駆動装置、及び電動パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016000328A JP2017123702A (ja) | 2016-01-05 | 2016-01-05 | インバータ制御装置およびそれを搭載したモータ駆動装置及び電動パワーステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017123702A true JP2017123702A (ja) | 2017-07-13 |
Family
ID=59274216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016000328A Ceased JP2017123702A (ja) | 2016-01-05 | 2016-01-05 | インバータ制御装置およびそれを搭載したモータ駆動装置及び電動パワーステアリング装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10924048B2 (ja) |
| JP (1) | JP2017123702A (ja) |
| KR (1) | KR102111444B1 (ja) |
| CN (1) | CN108476010B (ja) |
| DE (1) | DE112016005068T5 (ja) |
| WO (1) | WO2017119201A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020153152A1 (ja) * | 2019-01-22 | 2020-07-30 | 日立オートモティブシステムズ株式会社 | モータ制御装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6739577B1 (ja) * | 2019-04-08 | 2020-08-12 | 三菱電機株式会社 | モータ制御装置 |
| CN112234903A (zh) * | 2020-09-30 | 2021-01-15 | 环旭电子股份有限公司 | 车辆驱动装置及其方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006158182A (ja) * | 2004-10-26 | 2006-06-15 | Fuji Electric Fa Components & Systems Co Ltd | 電動機駆動システム |
| JP2009033938A (ja) * | 2007-07-30 | 2009-02-12 | Toshiba Corp | 電気車制御装置 |
| JP2011078230A (ja) * | 2009-09-30 | 2011-04-14 | Denso Corp | 多相回転機の制御装置、および、これを用いた電動パワーステアリング装置 |
| JP2011244577A (ja) * | 2010-05-18 | 2011-12-01 | Toyota Motor Corp | インバータ回路故障検出装置 |
| JP2014007880A (ja) * | 2012-06-26 | 2014-01-16 | Mitsubishi Electric Corp | 交流回転機の制御装置、及びその制御装置を備えた電動パワーステアリング装置 |
| JP2014236589A (ja) * | 2013-06-03 | 2014-12-15 | 日立オートモティブシステムズ株式会社 | 電動車両用電力制御装置および電動四輪駆動車両 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0810719B2 (ja) * | 1988-11-15 | 1996-01-31 | 株式会社新川 | 外部リード接合方法及び装置 |
| JP3536658B2 (ja) * | 1998-03-31 | 2004-06-14 | 日産自動車株式会社 | ハイブリッド車両の駆動制御装置 |
| JP2001327132A (ja) * | 2000-05-18 | 2001-11-22 | Mitsubishi Electric Corp | 極数切り替え誘導電動機 |
| JP3892804B2 (ja) * | 2002-12-25 | 2007-03-14 | 株式会社日立製作所 | 電力変換装置とその制御方法 |
| JP4679891B2 (ja) * | 2004-11-30 | 2011-05-11 | トヨタ自動車株式会社 | 交流電圧発生装置および動力出力装置 |
| JP4742781B2 (ja) * | 2005-09-28 | 2011-08-10 | トヨタ自動車株式会社 | 交流電圧出力装置およびそれを備えたハイブリッド自動車 |
| JP4892991B2 (ja) * | 2006-01-27 | 2012-03-07 | トヨタ自動車株式会社 | 電動機駆動装置およびそれを備えた車両 |
| JP4232789B2 (ja) * | 2006-04-24 | 2009-03-04 | トヨタ自動車株式会社 | 内燃機関の停止制御装置および停止制御方法 |
| WO2012046115A1 (en) | 2010-10-04 | 2012-04-12 | Jtekt Corporation | Electric power steering apparatus |
| JP2012076644A (ja) | 2010-10-04 | 2012-04-19 | Jtekt Corp | 電動パワーステアリング装置 |
| JP5397785B2 (ja) * | 2011-08-01 | 2014-01-22 | 株式会社デンソー | 3相回転機の制御装置 |
| JP5673605B2 (ja) * | 2012-05-30 | 2015-02-18 | 株式会社デンソー | 電動機駆動装置、および、これを用いた電動パワーステアリング装置 |
| JP5765589B2 (ja) * | 2013-03-11 | 2015-08-19 | 株式会社デンソー | 電力変換装置 |
| JP5987846B2 (ja) * | 2014-01-27 | 2016-09-07 | トヨタ自動車株式会社 | ハイブリッド車両 |
| WO2015129271A1 (ja) * | 2014-02-28 | 2015-09-03 | 日本精工株式会社 | モータ制御装置、これを使用した電動パワーステアリング装置および車両 |
| JP6075422B2 (ja) | 2015-08-31 | 2017-02-08 | 株式会社サンセイアールアンドディ | 遊技機 |
| JP6418196B2 (ja) * | 2016-04-15 | 2018-11-07 | トヨタ自動車株式会社 | 電気自動車 |
| JP6652089B2 (ja) * | 2017-03-07 | 2020-02-19 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6809354B2 (ja) * | 2017-04-18 | 2021-01-06 | トヨタ自動車株式会社 | ハイブリッド自動車 |
-
2016
- 2016-01-05 JP JP2016000328A patent/JP2017123702A/ja not_active Ceased
- 2016-11-22 CN CN201680072438.8A patent/CN108476010B/zh active Active
- 2016-11-22 WO PCT/JP2016/084619 patent/WO2017119201A1/ja active Application Filing
- 2016-11-22 DE DE112016005068.2T patent/DE112016005068T5/de active Pending
- 2016-11-22 KR KR1020187017481A patent/KR102111444B1/ko active IP Right Grant
- 2016-11-22 US US16/068,062 patent/US10924048B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006158182A (ja) * | 2004-10-26 | 2006-06-15 | Fuji Electric Fa Components & Systems Co Ltd | 電動機駆動システム |
| JP2009033938A (ja) * | 2007-07-30 | 2009-02-12 | Toshiba Corp | 電気車制御装置 |
| JP2011078230A (ja) * | 2009-09-30 | 2011-04-14 | Denso Corp | 多相回転機の制御装置、および、これを用いた電動パワーステアリング装置 |
| JP2011244577A (ja) * | 2010-05-18 | 2011-12-01 | Toyota Motor Corp | インバータ回路故障検出装置 |
| JP2014007880A (ja) * | 2012-06-26 | 2014-01-16 | Mitsubishi Electric Corp | 交流回転機の制御装置、及びその制御装置を備えた電動パワーステアリング装置 |
| JP2014236589A (ja) * | 2013-06-03 | 2014-12-15 | 日立オートモティブシステムズ株式会社 | 電動車両用電力制御装置および電動四輪駆動車両 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020153152A1 (ja) * | 2019-01-22 | 2020-07-30 | 日立オートモティブシステムズ株式会社 | モータ制御装置 |
| JP2020120459A (ja) * | 2019-01-22 | 2020-08-06 | 日立オートモティブシステムズ株式会社 | モータ制御装置 |
| JP7245057B2 (ja) | 2019-01-22 | 2023-03-23 | 日立Astemo株式会社 | モータ制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10924048B2 (en) | 2021-02-16 |
| CN108476010B (zh) | 2021-07-09 |
| CN108476010A (zh) | 2018-08-31 |
| KR20180083930A (ko) | 2018-07-23 |
| US20200280278A1 (en) | 2020-09-03 |
| WO2017119201A1 (ja) | 2017-07-13 |
| DE112016005068T5 (de) | 2018-07-19 |
| KR102111444B1 (ko) | 2020-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10232875B2 (en) | Motor control unit, failure detecting method, and electric power steering apparatus and vehicle equipped with the same | |
| JP6358104B2 (ja) | 回転電機制御装置 | |
| JP5603360B2 (ja) | モータ制御装置およびそれを用いた電動パワーステアリング装置 | |
| JP4082444B1 (ja) | 永久磁石同期電動機のベクトル制御装置 | |
| US9172317B2 (en) | Apparatus for controlling a multi-winding rotary machine | |
| US10103677B2 (en) | Control apparatus for electric rotating machine | |
| US10056854B2 (en) | Motor control unit and electric power steering apparatus using the same and vehicle | |
| JP5387614B2 (ja) | 回転機の制御装置 | |
| JP6428248B2 (ja) | モータ制御装置 | |
| JP4607691B2 (ja) | 永久磁石同期電動機の制御装置 | |
| US11005405B2 (en) | Rotating-electric-machine control apparatus and electric power steering control apparatus equipped with the rotating-electric-machine control apparatus | |
| CN112429076B (zh) | 电机控制装置 | |
| WO2017119201A1 (ja) | インバータ制御装置、モータ駆動装置、及び電動パワーステアリング装置 | |
| CN110574281B (zh) | 电动机的控制装置及电动助力转向系统 | |
| WO2019171836A1 (ja) | 車両制御装置 | |
| JP2015104235A (ja) | 多相電動機の駆動制御装置 | |
| CN108352801B (zh) | 电动机的控制装置及使用其的电动汽车 | |
| JP7564759B2 (ja) | 電力変換装置、及びプログラム | |
| JP6361540B2 (ja) | 回転電機の制御装置 | |
| JP5246446B2 (ja) | 負荷制御装置 | |
| JP2017208892A (ja) | 電動機の制御装置及びそれを備えた電動車両 | |
| JP2008236853A (ja) | 回転機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160106 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170119 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170125 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20180306 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180313 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190910 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191111 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200212 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20200630 |