JP2016085192A - 振動素子、電子デバイス、電子機器および移動体 - Google Patents
振動素子、電子デバイス、電子機器および移動体 Download PDFInfo
- Publication number
- JP2016085192A JP2016085192A JP2014220040A JP2014220040A JP2016085192A JP 2016085192 A JP2016085192 A JP 2016085192A JP 2014220040 A JP2014220040 A JP 2014220040A JP 2014220040 A JP2014220040 A JP 2014220040A JP 2016085192 A JP2016085192 A JP 2016085192A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- vibration
- drive
- base
- gyro element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
- G01C19/5621—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
Abstract
Description
これらの電子機器の小型化に伴い、振動素子にも小型化が求められている。振動素子を小型化すると、振動素子を形成する際の加工精度が相対的に大きくなる。例えば、振動腕を有する振動素子では、振動腕の形状が非対称になると主振動による面内方向の変位と、もれ振動による面内方向と交差する面外方向の変位と、を有する斜め振動が生じてしまう。この斜め振動を除去する方法として、特許文献1に記載されているように、振動腕と基部との間の結合領域に形成された金属膜(調整膜)をレーザーでトリミングする屈曲振動片の製造方法が知られていた。
<ジャイロ素子−1>
まず、実施形態1に係る振動素子としてのジャイロ素子について、図1および図2を参照して説明する。図1(a)はジャイロ素子を模式的に示す斜視図、図1(b)はジャイロ素子を模式的に示す平面図である。図2は、ジャイロ素子の電極構成を説明する図であり、図2(a)は図1(b)におけるA−A線での断面図、図2(b)は図1(b)におけるB−B線での断面図である。
さらに、検出振動腕3a,3bの基部1の一端側とは反対側の他端側には、検出振動腕3a,3bよりも幅の広い(X軸方向の寸法が大きい)略矩形状の錘部53a,53bが設けられている(図1参照)。このように、検出振動腕3a,3bにおいても、錘部53a,53bが設けられていることにより、検出振動腕3a,3bの長さ(Y軸方向の寸法)の増大を抑えながら所定の検出振動を得ることができるため、ジャイロ素子を小型化することが可能となる。また、一対の検出振動腕3a,3bには、凹部58a,58bが設けられている。本実施形態における凹部58a,58bは、図2に示すように表面3c,3gおよび裏面3d,3fの両面側から掘り込まれている構成であるが、表面3c,3gあるいは裏面3d,3fの一方の面から掘り込まれた構成でもよい。
図3に示すように、駆動振動腕2aのXZ平面に平行に切断した時、その断面形状は、ジャイロ素子100の外形を形成する際、製造工程における加工のばらつきなどにより、中心線CLに対して非対称になることがある。詳しくは、駆動振動腕2aの断面は、表面2cで形成される第1の辺と、裏面2dで形成される第2の辺とが、X軸方向に沿って互いに逆方向にズレを生じた平行四辺形をなしている。
検出回路200は、検出部としての検出振動腕3a,3b、チャージアンプ210a,210b、差動アンプ220、ACアンプ230、同期検波回路240、LPF(Low−pass filter)250、可変ゲインアンプ260を含み構成されている。
図5(a)は、駆動振動腕2a,2bの駆動振動を示す図、図5(b)は、ジャイロ素子100に加わる角速度の概略を示す図、図5(c)は、漏れ振動がない場合の出力信号の概略を示す図、図5(d)は、漏れ振動がある場合の出力信号の概略を示す図である。図5(a)〜(d)の横軸は時間を表し、図5(a)の縦軸は振幅を表し、図5(b)の縦軸は角速度を表し、図5(c)(d)の縦軸は出力電圧を表す。
図5(b)は、ジャイロ素子100のY軸回りに加えられる角速度を示している。
図5(c)は、漏れ振動によるZ軸方向の変位がない場合に、検出振動腕3aまたは検出振動腕3bから出力される出力信号を示している。図5(c)に示すように、漏れ振動がない場合には、角速度が加わらない領域では電圧が出力されない。角速度が加わっている領域では、角速度に駆動振動の波形が重畳された電圧が出力される。
また、本実施形態では、基材として圧電体材料である水晶を用いた例を説明したが、これに限定するものではない。例えば、基材にシリコンを主成分とした材料を用いてジャイロ素子の外形を形成し、駆動部または検出部として、駆動電極または検出電極に挟まれた圧電体を備えた、所謂圧電薄膜型のジャイロ素子であってもよい。
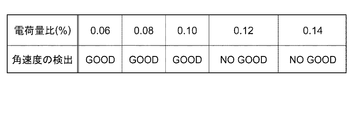
コリオリ力が生じていない状態で、ジャイロ素子100の検出振動腕3a,3bで検出される電荷を、駆動振動腕2a,2bに発生する電荷の0%を超え0.1%以下にすることで、ジャイロ素子100は、ジャイロセンサーの振動素子として用いることができる。これにより、駆動部としての駆動振動腕2a,2bの漏れ振動による面外方向(Z軸方向)の変位を必要以上に抑える必要がなくなり、ジャイロ素子100の歩留り向上と、ジャイロ素子100のトリミングに要する負荷を軽減させることができる。したがって、製造コストを低下させたジャイロ素子100を提供することができる。
<ジャイロ素子−2>
次に、図7を参照して、実施形態2に係る振動素子としてのジャイロ素子400について説明する。
図7は、実施形態2に係るジャイロ素子の概略構成を模式的に示し、ジャイロ素子を+側のZ軸方向から見た平面図である。なお、ジャイロ素子400には、検出信号電極、検出信号配線、検出信号端子、検出接地電極、検出接地配線、検出接地端子、駆動信号電極、駆動信号配線、駆動信号端子、駆動接地電極、駆動接地配線および駆動接地端子などが設けられているが、図7においては省略している。
<ジャイロ素子−3>
次に、図8を参照して、ジャイロ素子600について説明する。図8は、実施形態3に係る振動素子の一例としてのジャイロ素子600を模式的に示す平面図である。図9(a)は図8のE−E線での断面図、図9(b)は図8のF−F線での断面図である。
ジャイロ素子600は、振動体620の検出部650においてY軸まわりの角速度を検出するジャイロ素子(静電容量型MEMSジャイロ素子)である。
なお、便宜上、図8では、基体610を透視して図示している。また、基体610の振動体620が設けられる基面である第1面611(図9参照)の法線方向から見ること、即ち基体610に支持されている振動体620を上方から見ることを、以下、「平面視」という。
本実施形態の凹部614の平面形状(Z軸方向から見たときの形状)は、長方形であるが、特に限定されない。凹部614は、例えば、フォトリソグラフィー技術およびエッチング技術によって形成される。
図8および図9に示すように、弾性支持体630の一端615(固定部617)は、X軸方向において振動体620を挟むように配置されていてもよい。また、弾性支持体630の一端615は、Y軸方向において振動体620を挟むように配置されていてもよい。即ち、弾性支持体630の一端615は、2か所、あるいは4か所設けられていてもよい。
検出部650は、可動電極としての第1フラップ板651および第2フラップ板653と、第1フラップ板651と接続された第1梁部652と、第2フラップ板653と接続された第2梁部654と、検出用固定電極655と、を有している。第1フラップ板651および第2フラップ板653は、前述のように、シリコンに、例えば、リン、ボロン等の不純物がドープされることにより導電性が付与されている。
第2梁部654は、支持部612のY軸方向に沿って対向する二つの延在部分の内側に、両端が接続されている。第2フラップ板653の第2梁部654と接続されている端と反対側の端は、自由端となっている。第2フラップ板653は、第2梁部654を回転軸としてZ軸方向に搖動することができる。第1フラップ板651および第2フラップ板653のそれぞれの自由端は、Y軸方向の内側を向くように配置され、間隙を有して対向するように設けられている。
ジャイロ素子600の駆動振動は、角速度ωが加わらない状態において、支持部612に接続された駆動部640における駆動用固定電極部642と駆動用可動電極部641との間に生じる静電力により、振動体620がX軸に沿って往復振動(運動)を行う。より具体的には、駆動用固定電極部642と駆動用可動電極部641との間に交番電圧を印加する。これにより、第1フラップ板651および第2フラップ板653などを含む振動体620を、所定の周波数で、X軸に沿って振動させることができる。
ジャイロ素子600の振動体620などを含むシリコン構造体の形状は、例えばドライエッチング加工において加工誤差を生じるなどして、本来は正方形あるいは長方形になるべき断面形状が、図3(a)と同様に平行四辺形等に形成されてしまうことがある。この状態で、駆動部640に交流電圧を印加して、駆動振動を励起させた時、駆動部640は、主振動によるX軸方向(面内方向)の変位と、漏れ振動によるZ軸方向(面外方向)の変位と、を有する斜め振動を生じてしまう。この斜め振動が検出部650に伝わり、検出部650が角速度を検出する振動方向であるZ軸方向に振動してしまうと、角速度が生じていないにもかかわらず検出部650が角速度を検出してしまったり、検出した角速度に誤差を生じてしまったりする。
次に、実施形態1に係るジャイロ素子100を備えた電子デバイスとしてのジャイロセンサー500について、図10を参照して説明する。図10は、電子デバイスの一例としてのジャイロセンサーの概略構成を示す正断面図である。
次に、図11を参照して、前述の実施形態に係る振動素子を備えた電子機器について説明する。なお、以下の説明では、振動素子の一例としてジャイロ素子100を用いた例について説明する。図11(a)〜図11(c)は、ジャイロ素子100を備える電子機器の一例を示す斜視図である。
次に、前述の実施形態に係る振動素子を備えた移動体について説明する。なお、以下の説明では、振動素子の一例としてジャイロ素子100を用いた例について説明する。図12は移動体の一例としての自動車を概略的に示す斜視図である。自動車1500には実施形態3に係るジャイロ素子100が搭載されている。例えば、同図に示すように、移動体としての自動車1500には、ジャイロ素子100を内蔵してタイヤなどを制御する電子制御ユニット1510が車体に搭載されている。また、ジャイロ素子100は、他にもキーレスエントリー、イモビライザー、カーナビゲーションシステム、カーエアコン、アンチロックブレーキシステム(ABS)、エアバック、タイヤ・プレッシャー・モニタリング・システム(TPMS:Tire Pressure Monitoring System)、エンジンコントロール、ハイブリッド自動車や電気自動車の電池モニター、車体姿勢制御システム、等の電子制御ユニット(ECU:Electronic Control Unit)に広く適用できる。
Claims (8)
- 電圧が印加され駆動する駆動部と、
前記駆動部に生じるコリオリ力の影響に応じて電荷が生じる検出部と、を備え、
前記コリオリ力が生じていない状態で、前記検出部で検出される電荷量は、前記駆動部に発生する電荷量の0%を超え0.1%以下であることを特徴とする振動素子。 - 基部を有し、
前記駆動部は、前記基部の一方の端部から延出し、
前記検出部は、前記基部の前記一方の端部とは前記基部を境にして反対側の他方の端部から延出していること、を特徴とする請求項1に記載の振動素子。 - 前記検出部は、前記基部から延出し、前記検出部または前記駆動部を挟むように位置している調整部を含んでいること、を特徴とする請求項2に記載の振動素子。
- 基部と、
前記基部から両側に延出している連結部と、を有し、
前記検出部は、前記基部から前記連結部の延出方向と交差する方向に沿って前記連結部を境とした両側に延出し、
前記駆動部は、前記連結部の前記基部の側と反対側の先端部から前記検出部の延出方向に沿って両側に延出していること、を特徴とする請求項1に記載の振動素子。 - 前記駆動部、前記検出部、および前記調整部の少なくとも一つの、前記基部の一端側とは反対側の他端側に、錘部が設けられていること、を特徴とする請求項1から請求項4のいずれか一項に記載の振動素子。
- 請求項1から請求項5のいずれか一項に記載の振動素子と、
少なくとも前記駆動部を励振させる駆動回路を含む電子部品と、
前記振動素子および前記電子部品の少なくとも一方を収容しているパッケージと、を備えていること、を特徴とする電子デバイス。 - 請求項1から請求項5のいずれか一項に記載の振動素子を備えていること、を特徴とする電子機器。
- 請求項1から請求項5のいずれか一項に記載の振動素子を備えていること、を特徴とする移動体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014220040A JP2016085192A (ja) | 2014-10-29 | 2014-10-29 | 振動素子、電子デバイス、電子機器および移動体 |
| US14/921,786 US10001373B2 (en) | 2014-10-29 | 2015-10-23 | Resonator element, electronic device, electronic apparatus, and moving object |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014220040A JP2016085192A (ja) | 2014-10-29 | 2014-10-29 | 振動素子、電子デバイス、電子機器および移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016085192A true JP2016085192A (ja) | 2016-05-19 |
| JP2016085192A5 JP2016085192A5 (ja) | 2017-11-24 |
Family
ID=55852323
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014220040A Withdrawn JP2016085192A (ja) | 2014-10-29 | 2014-10-29 | 振動素子、電子デバイス、電子機器および移動体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10001373B2 (ja) |
| JP (1) | JP2016085192A (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6256215B2 (ja) * | 2014-06-13 | 2018-01-10 | 株式会社デンソー | 角速度センサ |
| JP6477100B2 (ja) * | 2015-03-23 | 2019-03-06 | セイコーエプソン株式会社 | 角速度検出素子、角速度検出デバイス、電子機器および移動体 |
| JP6477101B2 (ja) * | 2015-03-23 | 2019-03-06 | セイコーエプソン株式会社 | 角速度検出素子、角速度検出デバイス、電子機器および移動体 |
| JP2018152828A (ja) * | 2017-03-15 | 2018-09-27 | セイコーエプソン株式会社 | 振動デバイス、発振器、電子機器および移動体 |
| JP7251385B2 (ja) | 2019-07-30 | 2023-04-04 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130047727A1 (en) * | 2011-08-26 | 2013-02-28 | Sung Tae Kim | Driving circuit, system, and driving method for gyro sensor |
| JP2013072851A (ja) * | 2011-09-29 | 2013-04-22 | Seiko Epson Corp | センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器 |
| JP2014197010A (ja) * | 2014-05-29 | 2014-10-16 | セイコーエプソン株式会社 | 角速度検出装置及び電子機器 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10132573A (ja) | 1996-10-31 | 1998-05-22 | Kinseki Ltd | 屈曲振動圧電振動子及びその調整方法 |
| JP2002243451A (ja) | 2001-02-19 | 2002-08-28 | Matsushita Electric Ind Co Ltd | 角速度センサおよびその特性調整方法 |
| JP4026074B2 (ja) | 2003-06-30 | 2007-12-26 | 有限会社ピエデック技術研究所 | 水晶振動子と水晶ユニットと水晶発振器 |
| JP4309814B2 (ja) | 2004-06-30 | 2009-08-05 | Necトーキン株式会社 | 圧電振動ジャイロ用振動子の調整方法 |
| JP5320087B2 (ja) | 2009-01-27 | 2013-10-23 | セイコーエプソン株式会社 | 物理量検出装置、物理量検出システム及び物理量検出装置の0点電圧調整方法 |
| JP5765087B2 (ja) | 2011-06-27 | 2015-08-19 | セイコーエプソン株式会社 | 屈曲振動片、その製造方法及び電子機器 |
-
2014
- 2014-10-29 JP JP2014220040A patent/JP2016085192A/ja not_active Withdrawn
-
2015
- 2015-10-23 US US14/921,786 patent/US10001373B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130047727A1 (en) * | 2011-08-26 | 2013-02-28 | Sung Tae Kim | Driving circuit, system, and driving method for gyro sensor |
| JP2013072851A (ja) * | 2011-09-29 | 2013-04-22 | Seiko Epson Corp | センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器 |
| JP2014197010A (ja) * | 2014-05-29 | 2014-10-16 | セイコーエプソン株式会社 | 角速度検出装置及び電子機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10001373B2 (en) | 2018-06-19 |
| US20160123734A1 (en) | 2016-05-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9490773B2 (en) | Vibrating element, electronic device, electronic apparatus, and moving object | |
| JP6399283B2 (ja) | 物理量検出装置、電子機器及び移動体 | |
| JP6323034B2 (ja) | 機能素子、電子デバイス、電子機器、および移動体 | |
| US10001373B2 (en) | Resonator element, electronic device, electronic apparatus, and moving object | |
| US10079590B2 (en) | Vibrator element, electronic device, electronic apparatus, moving object, and method of manufacturing vibrator element | |
| US20160123736A1 (en) | Vibration element, electronic device, electronic apparatus, and moving object | |
| JP6435596B2 (ja) | 振動素子、振動デバイス、電子機器、および移動体 | |
| JP5970690B2 (ja) | センサー素子、センサーユニット、電子機器及びセンサーユニットの製造方法 | |
| JP2013186029A (ja) | 振動片、センサーユニットおよび電子機器 | |
| JP6488709B2 (ja) | 振動素子の製造方法、振動素子、電子デバイス、電子機器、および移動体 | |
| US9048418B2 (en) | Sensor element, sensor device, and electronic apparatus | |
| JP2015001420A (ja) | ジャイロセンサー素子、ジャイロ装置、電子機器および移動体 | |
| JP6210345B2 (ja) | ジャイロセンサー素子、ジャイロセンサーユニット、電子機器及びジャイロセンサーユニットの製造方法 | |
| JP2015118027A (ja) | 振動素子、電子デバイス、電子機器および移動体 | |
| JP2016090252A (ja) | ジャイロ素子、ジャイロ素子の製造方法、ジャイロセンサー、電子機器、および移動体 | |
| JP6264839B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6569257B2 (ja) | 振動素子、電子デバイス、電子機器、および移動体 | |
| JP6464667B2 (ja) | ジャイロ素子、ジャイロセンサー、電子機器、および移動体 | |
| JP2015169492A (ja) | 電子デバイス、電子デバイスの信号検出方法、電子機器、および移動体 | |
| JP2016017768A (ja) | センサー素子、センサーデバイス、電子機器および移動体 | |
| JP2017101985A (ja) | 振動デバイス、電子機器、および移動体 | |
| JP2015179933A (ja) | 振動素子、ジャイロセンサー素子、電子デバイス、電子機器および移動体 | |
| JP2016092466A (ja) | 振動素子、振動素子の製造方法、電子デバイス、電子機器、および移動体 | |
| JP2016085191A (ja) | 振動素子、振動素子の製造方法、電子デバイス、電子機器、および移動体 | |
| JP2016061710A (ja) | 振動素子、ジャイロ素子、電子デバイス、電子機器、および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160623 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171013 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171013 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180724 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180905 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20180925 |