JP2013246152A - ダイナモメータシステムの制御装置 - Google Patents
ダイナモメータシステムの制御装置 Download PDFInfo
- Publication number
- JP2013246152A JP2013246152A JP2012122378A JP2012122378A JP2013246152A JP 2013246152 A JP2013246152 A JP 2013246152A JP 2012122378 A JP2012122378 A JP 2012122378A JP 2012122378 A JP2012122378 A JP 2012122378A JP 2013246152 A JP2013246152 A JP 2013246152A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- control device
- dynamometer
- compensator
- load cell
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/16—Rotary-absorption dynamometers, e.g. of brake type
- G01L3/22—Rotary-absorption dynamometers, e.g. of brake type electrically or magnetically actuated
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Electric Motors In General (AREA)
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
Abstract
【解決手段】ダイナモメータの制御装置5Aは、ロードセルの出力信号LC_detに基づいてトルク指令信号を出力するトルク制御装置6と、揺動子の固有振動が抑制されるようにトルク指令信号を補正し、制御入力信号としてインバータに入力する固有振動抑制回路7と、を備える。固有振動抑制回路7は、オブザーバ演算部8Aの振動出力演算部81Aにおいて2次遅れ標準形の近似式を用いて算出されたロードセルの近似信号Pmdl_detに微分演算を施す微分補償器71と、トルク指令信号Tdy_refから微分補償器71の出力信号を減算することによってトルク指令信号を補正する減算器72とを備えることを特徴とする。
【選択図】図5
Description

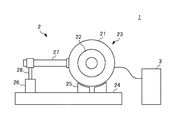
図1は、揺動式のダイナモメータシステム1の構成を模式的に示す図である。
システム1は、揺動式のダイナモメータ2と、トルク電流指令信号に応じた電力をダイナモメータ2に供給するインバータ3と、これらの図示しない制御装置と、を含んで構成される。
図2において、制御対象9は、図1を参照して説明したインバータ、ダイナモメータ、及びロードセルなどを含んで構成される。制御装置5は、図2に示す制御系におけるメジャーループを構成する主制御装置としてのトルク制御装置6と、マイナーループを構成する固有振動抑制回路7と、を備える。
本実施例の制御装置5Aは、実施例1の制御装置5と比較してオブザーバ演算部8Aをさらに備える点で異なる。以下の制御装置5Aの説明において、実施例1の制御装置5と同じ構成については同一の符号を付し、その説明を省略する。
振動出力演算部81Aは、インバータに入力されるトルク電流指令信号Tdy_ref’と偏差補償器83Aから出力される後述のフィードバック信号との和を入力として、下記式(7)に示す近似式に基づいて近似信号Pmdl_detを出力する。振動出力演算部81Aから出力される近似信号Pmdl_detは、遅れ補償器82A及び微分補償器71に入力される。
偏差補償器83Aは、遅れ補償器82Aの出力信号LCmdl_detからロードセルの出力信号LC_detを減算して得られる偏差errが最小になるようにフィードバック信号を出力する。この偏差補償器83Aの伝達関数F(s)は、例えば、係数KGを調整ゲイン(0<KG<1)とし、1/FLPF(s)を相対次数1以上の任意の伝達関数として、下記式(8)で表される。
本実施例の制御装置5Bは、実施例2の制御装置5Aと比較してオブザーバ演算部8Bの構成が異なる。以下の制御装置5Bの説明において、実施例2の制御装置5Bと同じ構成については同一の符号を付し、その説明を省略する。
本実施例の制御装置5Cは、実施例2の制御装置5Aと比較してオブザーバ演算部8Cの構成が異なる。以下の制御装置5Cの説明において、実施例2の制御装置5Aと同じ構成については同一の符号を付し、その説明を省略する。
本実施例の制御装置5Dは、実施例4の制御装置5Cと比較してオブザーバ演算部8Cの構成が異なる。以下の制御装置5Dの説明において、実施例4の制御装置5Cと同じ構成については同一の符号を付し、その説明を省略する。
本実施例によれば、無駄時間分の位相進み補償、実際のロードセルの検出特性補償、及び直流ゲイン特性補償した近似信号Pmdl_detを微分補償器71に入力できる。これにより、より確実に揺動子の固有振動を抑制できる。
2…ダイナモメータ
23…揺動子
26…ロードセル
27…トルクアーム
3…インバータ
5,5A,5B,5C,5D…制御装置
6…トルク制御装置(主制御装置)
7…固有振動抑制回路(固有振動抑制手段)
71…微分補償器
72…減算器
8A,8B,8C,8D…オブザーバ演算部
81A…振動出力演算部
82A,82B…遅れ補償器
83A…偏差補償器
84C…比例要素
85C…加算器
Claims (5)
- 負荷に接続された揺動式のダイナモメータと、
当該ダイナモメータに電力を供給するインバータと、
前記ダイナモメータの揺動子に発生するトルクを、当該揺動子から延びるトルクアームを介して検出するロードセルと、を備えたダイナモメータシステムの制御装置であって、
前記ロードセルの出力信号に基づいて主信号を出力する主制御装置と、
前記揺動子の固有振動が抑制されるように前記主信号を補正し、制御入力信号として前記インバータに入力する固有振動抑制手段と、を備え、
前記固有振動抑制手段は、前記ロードセルの出力信号又は所定の近似式を用いて算出された前記ロードセルの近似信号に微分演算を施す微分補償器と、前記主信号から前記微分補償器の出力信号を減算することによって当該主信号を補正する減算器とを備えることを特徴とするダイナモメータシステムの制御装置。 - 前記インバータに入力される制御入力信号又はこれに比例した信号と所定のフィードバック信号との和を入力として、前記インバータの入力から前記ロードセルの出力までを所定のダンピング係数及び前記揺動子の固有振動数によって特徴付けられる近似式に基づいて前記近似信号を出力する振動出力演算部と、
前記近似信号を所定の無駄時間だけ遅らせる無駄時間遅れ要素を備えた遅れ補償器と、
前記遅れ補償器の出力信号と前記ロードセルの出力信号との偏差が最小になるように前記振動出力演算部へ前記フィードバック信号を出力する偏差補償器と、をさらに備え、
前記微分補償器は、前記遅れ補償器に入力される前記近似信号を入力とすることを特徴とする請求項1に記載のダイナモメータシステムの制御装置。 - 前記遅れ補償器は、前記無駄時間遅れ要素と、前記近似信号からノイズを除去するローパスフィルタ要素とを接続して構成されることを特徴とする請求項2に記載のダイナモメータシステムの制御装置。
- 前記インバータに入力される制御入力信号に所定の係数を乗算する比例要素と、
当該比例要素の出力信号と前記フィードバック信号との和を前記振動出力演算部に入力する加算器と、をさらに備えることを特徴とする請求項2又は3に記載のダイナモメータシステムの制御装置。 - 前記近似式は、ωnを前記揺動子の固有振動数とし、ζをダンピング係数とし、sをラプラス演算子とし、下記伝達関数Pmdl(s)で定義され、
前記微分補償器の伝達関数は、Kを0より大きく1より小さい任意の定数とし、1/GLPF(s)を相対次数1以上の任意の伝達関数とし、擬似微分特性を有する下記伝達関数HLPF(s)で定義されることを特徴とする請求項2から4の何れかに記載のダイナモメータの制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012122378A JP5541314B2 (ja) | 2012-05-29 | 2012-05-29 | ダイナモメータシステムの制御装置 |
| US14/404,352 US9335228B2 (en) | 2012-05-29 | 2013-05-28 | Dynamometer system control device |
| CN201380027761.XA CN104380067B (zh) | 2012-05-29 | 2013-05-28 | 测力计系统的控制装置 |
| PCT/JP2013/064771 WO2013180130A1 (ja) | 2012-05-29 | 2013-05-28 | ダイナモメータシステムの制御装置 |
| KR1020147036138A KR101515902B1 (ko) | 2012-05-29 | 2013-05-28 | 다이나모미터 시스템의 제어장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012122378A JP5541314B2 (ja) | 2012-05-29 | 2012-05-29 | ダイナモメータシステムの制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013246152A true JP2013246152A (ja) | 2013-12-09 |
| JP2013246152A5 JP2013246152A5 (ja) | 2014-04-03 |
| JP5541314B2 JP5541314B2 (ja) | 2014-07-09 |
Family
ID=49673322
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012122378A Active JP5541314B2 (ja) | 2012-05-29 | 2012-05-29 | ダイナモメータシステムの制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9335228B2 (ja) |
| JP (1) | JP5541314B2 (ja) |
| KR (1) | KR101515902B1 (ja) |
| CN (1) | CN104380067B (ja) |
| WO (1) | WO2013180130A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016052084A1 (ja) * | 2014-09-30 | 2016-04-07 | 株式会社明電舎 | ダイナモメータシステムの制御装置 |
| KR20170010441A (ko) | 2014-07-14 | 2017-01-31 | 메이덴샤 코포레이션 | 요동식 다이나모미터 시스템 및 그의 제어 방법 |
| KR20190136102A (ko) | 2017-05-09 | 2019-12-09 | 메이덴샤 코포레이션 | 다이나모미터 시스템의 제어 장치 |
| EP3489641B1 (en) * | 2017-11-27 | 2024-04-17 | Goodrich Actuation Systems Limited | Improved system for detecting a mechanical fault in a rotating shaft |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101646129B1 (ko) | 2015-02-16 | 2016-08-05 | 현대자동차 주식회사 | 차량용 라디에이터 |
| DE112015000231T5 (de) * | 2015-06-18 | 2017-02-09 | Mitsubishi Electric Corporation | Steuerparameter-Einstellvorrichtung |
| JP6629574B2 (ja) * | 2015-11-12 | 2020-01-15 | 株式会社エー・アンド・デイ | エンジン試験装置 |
| KR101897327B1 (ko) * | 2016-04-25 | 2018-09-11 | 국방과학연구소 | 힘 측정 센서 및 이에 의한 실시간 오프셋 제거 방법 |
| JP6226021B2 (ja) * | 2016-04-28 | 2017-11-08 | 株式会社明電舎 | 試験システムのダイナモメータ制御装置 |
| JP6531250B2 (ja) * | 2016-07-22 | 2019-06-19 | 株式会社明電舎 | 軸トルク制御装置 |
| JP6497408B2 (ja) * | 2017-04-14 | 2019-04-10 | 株式会社明電舎 | 電気慣性制御装置 |
| JP6687086B1 (ja) * | 2018-11-07 | 2020-04-22 | 株式会社明電舎 | 電気慣性制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2798217B2 (ja) * | 1989-07-27 | 1998-09-17 | 三菱重工業株式会社 | 高速位置決め制御方法 |
| JP2008070119A (ja) * | 2006-09-12 | 2008-03-27 | Meidensha Corp | エンジンベンチシステムの制御方法とその装置 |
| JP2010019652A (ja) * | 2008-07-10 | 2010-01-28 | Meidensha Corp | エンジンベンチシステムの動力計制御方式 |
| JP2011161987A (ja) * | 2010-02-05 | 2011-08-25 | Nsk Ltd | 電動パワーステアリング装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5857697B2 (ja) * | 1978-05-25 | 1983-12-21 | 株式会社小野測器 | 負荷制御方法及び装置 |
| JPS5890135A (ja) | 1981-11-26 | 1983-05-28 | Meidensha Electric Mfg Co Ltd | 動力計のトルク検出装置 |
| JPH01138836A (ja) | 1987-11-26 | 1989-05-31 | Mitsubishi Electric Corp | 端末制御方式 |
| US4963804A (en) * | 1989-07-10 | 1990-10-16 | Westinghouse Electric Corp. | Apparatus and method for reducing vibration of rotating machinery |
| JP4826088B2 (ja) | 2004-12-28 | 2011-11-30 | 株式会社明電舎 | 油圧浮揚式電気動力計 |
| EP2159554A1 (de) * | 2008-08-29 | 2010-03-03 | Mettler-Toledo AG | Verfahren zur Zustandsüberwachung einer Kraftmessvorrichtung, Kraftmessvorrichtung und Kraftmessmodul |
-
2012
- 2012-05-29 JP JP2012122378A patent/JP5541314B2/ja active Active
-
2013
- 2013-05-28 CN CN201380027761.XA patent/CN104380067B/zh active Active
- 2013-05-28 KR KR1020147036138A patent/KR101515902B1/ko active IP Right Grant
- 2013-05-28 WO PCT/JP2013/064771 patent/WO2013180130A1/ja active Application Filing
- 2013-05-28 US US14/404,352 patent/US9335228B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2798217B2 (ja) * | 1989-07-27 | 1998-09-17 | 三菱重工業株式会社 | 高速位置決め制御方法 |
| JP2008070119A (ja) * | 2006-09-12 | 2008-03-27 | Meidensha Corp | エンジンベンチシステムの制御方法とその装置 |
| JP2010019652A (ja) * | 2008-07-10 | 2010-01-28 | Meidensha Corp | エンジンベンチシステムの動力計制御方式 |
| JP2011161987A (ja) * | 2010-02-05 | 2011-08-25 | Nsk Ltd | 電動パワーステアリング装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170010441A (ko) | 2014-07-14 | 2017-01-31 | 메이덴샤 코포레이션 | 요동식 다이나모미터 시스템 및 그의 제어 방법 |
| KR101784166B1 (ko) | 2014-07-14 | 2017-10-11 | 메이덴샤 코포레이션 | 요동식 다이나모미터 시스템 및 그의 제어 방법 |
| WO2016052084A1 (ja) * | 2014-09-30 | 2016-04-07 | 株式会社明電舎 | ダイナモメータシステムの制御装置 |
| JP2016070786A (ja) * | 2014-09-30 | 2016-05-09 | 株式会社明電舎 | ダイナモメータシステムの制御装置 |
| KR101784716B1 (ko) | 2014-09-30 | 2017-10-12 | 메이덴샤 코포레이션 | 다이나모미터 시스템의 제어 장치 |
| KR20190136102A (ko) | 2017-05-09 | 2019-12-09 | 메이덴샤 코포레이션 | 다이나모미터 시스템의 제어 장치 |
| US11073437B2 (en) | 2017-05-09 | 2021-07-27 | Meidensha Corporation | Dynamometer system control device |
| EP3489641B1 (en) * | 2017-11-27 | 2024-04-17 | Goodrich Actuation Systems Limited | Improved system for detecting a mechanical fault in a rotating shaft |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5541314B2 (ja) | 2014-07-09 |
| US9335228B2 (en) | 2016-05-10 |
| US20150219510A1 (en) | 2015-08-06 |
| CN104380067B (zh) | 2016-01-20 |
| KR20150023461A (ko) | 2015-03-05 |
| WO2013180130A1 (ja) | 2013-12-05 |
| KR101515902B1 (ko) | 2015-05-04 |
| CN104380067A (zh) | 2015-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5541314B2 (ja) | ダイナモメータシステムの制御装置 | |
| JP5120654B2 (ja) | サーボ制御装置 | |
| JP6584658B2 (ja) | 電動パワーステアリング装置 | |
| WO2008075558A1 (ja) | 位置制御装置 | |
| JP2006350792A (ja) | 機械位置制御装置 | |
| KR101402873B1 (ko) | 전동기의 위치제어장치 | |
| JP2009042985A (ja) | モータ制御装置及びモータ制御方法 | |
| WO2016163343A1 (ja) | モータ制御装置及びそれを搭載した電動パワーステアリング装置 | |
| KR20160016895A (ko) | 주기성 교란의 자동 억제장치 | |
| JP2011257205A (ja) | ダイナモメータシステムの軸トルク制御装置 | |
| JP2015170208A (ja) | 制御装置、制御方法及び制御プログラム | |
| JP2005085074A (ja) | 位置制御装置 | |
| JP6369596B1 (ja) | ダイナモメータシステムの制御装置 | |
| JP5386859B2 (ja) | モータのトルクリップル抑制装置 | |
| JP2010019713A (ja) | 動力計システムの電気慣性制御装置 | |
| JP5017984B2 (ja) | サーボ制御装置とその速度追従制御方法 | |
| JP2011160574A (ja) | 電動機の速度制御装置 | |
| JP5605128B2 (ja) | 動力計の軸トルク制御装置 | |
| JP4766456B2 (ja) | 交流電動機の制御装置およびその制御方法 | |
| JP2010120453A (ja) | 外乱振動抑制制御器 | |
| JP6226833B2 (ja) | 電力変換装置 | |
| JP2008289218A (ja) | モータ制御装置とその制御方法 | |
| JP5434264B2 (ja) | サーボ制御装置 | |
| WO2020235130A1 (ja) | モータ駆動装置及びモータ駆動装置の制御方法 | |
| JPH11155295A (ja) | 制振制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140218 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140218 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20140218 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20140310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140408 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140421 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5541314 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |