JP2012115932A - 搬送ロボット - Google Patents
搬送ロボット Download PDFInfo
- Publication number
- JP2012115932A JP2012115932A JP2010266950A JP2010266950A JP2012115932A JP 2012115932 A JP2012115932 A JP 2012115932A JP 2010266950 A JP2010266950 A JP 2010266950A JP 2010266950 A JP2010266950 A JP 2010266950A JP 2012115932 A JP2012115932 A JP 2012115932A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- link
- drive means
- elevating
- link member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 70
- 230000003028 elevating effect Effects 0.000 claims description 109
- 239000000758 substrate Substances 0.000 description 154
- 230000005540 biological transmission Effects 0.000 description 30
- 230000033001 locomotion Effects 0.000 description 15
- 210000000707 wrist Anatomy 0.000 description 15
- 239000003638 chemical reducing agent Substances 0.000 description 10
- 239000011521 glass Substances 0.000 description 10
- 230000005484 gravity Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 7
- 238000006073 displacement reaction Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 238000003786 synthesis reaction Methods 0.000 description 4
- 230000003321 amplification Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 238000005229 chemical vapour deposition Methods 0.000 description 1
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/04—Arms extensible rotatable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
- B25J9/044—Cylindrical coordinate type comprising an articulated arm with forearm providing vertical linear movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0095—Manipulators transporting wafers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/067—Sheet handling, means, e.g. manipulators, devices for turning or tilting sheet glass
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2249/00—Aspects relating to conveying systems for the manufacture of fragile sheets
- B65G2249/02—Controlled or contamination-free environments or clean space conditions
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
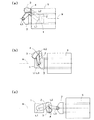
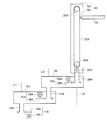
【解決手段】本発明の搬送ロボットは、第1軸線周りに回転可能に構成された第1リンク部材と、第1軸線に対して所定距離に位置する第2軸線周りに回転可能に構成された第2リンク部材と、第2軸線に対して所定距離に位置する第3軸線周りに回転可能であり且つ物品を保持可能に構成された保持部材と、少なくとも保持部材を昇降駆動するための昇降駆動手段と、を備える。第1リンク部材、第2リンク部材、及び保持部材が、この順番で連結されてアームリンク機構を構成しており、昇降駆動手段が、第1リンク部材と保持部材との間に配置されてアームリンク機構の一部を構成している。
【選択図】図1
Description
2,2A,2B 第1リンク部材
3,3A,3B 第2リンク部材
4,4A,4B 昇降駆動手段
5,5A,5B 昇降駆動手段の柱状部材
6,6A,6B 昇降駆動手段の昇降部材
7,7A,7B 基板保持部材
8,8A,8B 基板保持部材の基端部
9,9A,9B 基板保持部材のフィンガー部
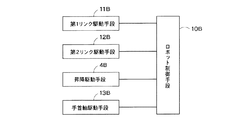
10 ロボット制御手段
11 第1リンク駆動手段
12 第2リンク駆動手段
13 手首軸駆動手段
L1 第1軸線
L2 第2軸線
L3 第3軸線
M 共通の直線
S ガラス基板
Claims (9)
- 第1軸線周りに回転可能に構成された第1リンク部材と、
前記第1軸線に対して所定距離に位置する第2軸線周りに回転可能に構成された第2リンク部材と、
前記第2軸線に対して所定距離に位置する第3軸線周りに回転可能であり且つ物品を保持可能に構成された保持部材と、
少なくとも前記保持部材を昇降駆動するための昇降駆動手段と、を備え、
前記第1リンク部材、前記第2リンク部材、及び前記保持部材が、この順番で連結されてアームリンク機構を構成しており、前記昇降駆動手段が、前記第1リンク部材と前記保持部材との間に配置されて前記アームリンク機構の一部を構成している、搬送ロボット。 - 前記昇降駆動手段は、前記第2リンク部材と前記保持部材との連結に使用されている、請求項1記載の搬送ロボット。
- 前記昇降駆動手段は、前記第2リンク部材に固定して設けられた柱状部材と、前記柱状部材に対して昇降可能に設けられた昇降部材と、を有し、前記保持部材は、前記昇降部材に前記第3軸線周りに回転可能に設けられている、請求項2記載の搬送ロボット。
- 前記昇降駆動手段は、前記第2リンク部材に前記第3軸線周りに回転可能に設けられた柱状部材と、前記柱状部材に対して昇降可能に設けられた昇降部材と、を有し、前記保持部材は、前記昇降部材に固定して設けられている、請求項2記載の搬送ロボット。
- 前記昇降駆動手段は、前記第1リンク部材と前記第2リンク部材との連結に使用されている、請求項1記載の搬送ロボット。
- 前記昇降駆動手段は、前記第1リンクに固定して設けられた柱状部材と、前記柱状部材に対して昇降可能に設けられた昇降部材と、を有し、前記第2リンク部材は、前記昇降部材に前記第2軸線周りに回転可能に設けられており、前記保持部材は、前記第2リンク部材に前記第3軸線周りに回転可能に設けられている、請求項5記載の搬送ロボット。
- 前記昇降駆動手段は、前記第1リンク部材に前記第2軸線周りに回転可能に設けられた柱状部材と、前記柱状部材に対して昇降可能に設けられた昇降部材と、を有し、前記第2リンク部材は、前記昇降部材に固定して設けられている、請求項5記載の搬送ロボット。
- 前記第1軸線と前記第2軸線との前記所定距離が、前記第2軸線と前記第3軸線との前記所定距離に等しい、請求項1乃至7のいずれか一項に記載の搬送ロボット。
- 動作範囲制御上の最後退位置において物品を保持した前記保持部材、前記保持部材に保持された前記物品、前記第1リンク部材、前記第2リンク部材、前記昇降駆動手段を含む領域が、前記第1軸線から前記物品又は前記保持部材の最遠点までの距離を半径として前記第1軸線周りに1回転したときの旋回領域内に配置されるように、前記保持部材、前記第1リンク部材、前記第2リンク部材、前記昇降駆動手段の各寸法、前記昇降駆動手段の向きが選ばれていることを特徴とする、請求項1乃至8のいずれか一項に記載の搬送ロボット。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010266950A JP5847393B2 (ja) | 2010-11-30 | 2010-11-30 | 搬送ロボット |
| CN201180051810.4A CN103189168B (zh) | 2010-11-30 | 2011-11-30 | 搬送机械手 |
| KR1020137007092A KR101512912B1 (ko) | 2010-11-30 | 2011-11-30 | 반송 로봇 |
| PCT/JP2011/077674 WO2012074007A1 (ja) | 2010-11-30 | 2011-11-30 | 搬送ロボット |
| US13/822,848 US9579804B2 (en) | 2010-11-30 | 2011-11-30 | Transfer robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010266950A JP5847393B2 (ja) | 2010-11-30 | 2010-11-30 | 搬送ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012115932A true JP2012115932A (ja) | 2012-06-21 |
| JP5847393B2 JP5847393B2 (ja) | 2016-01-20 |
Family
ID=46171934
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010266950A Active JP5847393B2 (ja) | 2010-11-30 | 2010-11-30 | 搬送ロボット |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9579804B2 (ja) |
| JP (1) | JP5847393B2 (ja) |
| KR (1) | KR101512912B1 (ja) |
| CN (1) | CN103189168B (ja) |
| WO (1) | WO2012074007A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016016471A (ja) * | 2014-07-07 | 2016-02-01 | 株式会社ダイヘン | ワーク搬送装置 |
| WO2019073865A1 (ja) * | 2017-10-13 | 2019-04-18 | 日本電産サンキョー株式会社 | 産業用ロボット |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102177003B (zh) * | 2008-10-07 | 2015-04-22 | 川崎重工业株式会社 | 基板输送机器人及系统 |
| JP5620172B2 (ja) * | 2010-07-16 | 2014-11-05 | キヤノンアネルバ株式会社 | 基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法 |
| KR101450478B1 (ko) * | 2013-11-25 | 2014-10-13 | 주식회사 윌리언스 | 필름전사 시스템 |
| WO2016076722A2 (en) * | 2014-11-14 | 2016-05-19 | Mapper Lithography Ip B.V. | Load lock system and method for transferring substrates in a lithography system |
| US10428220B2 (en) * | 2014-12-19 | 2019-10-01 | Merck Patent Gmbh | Particles for electrophoretic displays |
| CN107000202B (zh) * | 2014-12-26 | 2020-03-17 | 川崎重工业株式会社 | 多关节机器人及其模块 |
| CN106956290B (zh) * | 2017-04-17 | 2019-09-10 | 京东方科技集团股份有限公司 | 机械臂及其操作方法、机械臂装置及显示面板生产设备 |
| CN109186451A (zh) * | 2018-08-22 | 2019-01-11 | 西安工程大学 | 一种多角度激光干涉测量用激光器夹持调整装置 |
| CN110202565A (zh) * | 2019-05-30 | 2019-09-06 | 上海海事大学 | 微波炉高温食物抓取机械装置 |
| CN111776747B (zh) * | 2020-07-31 | 2021-12-14 | 林铭兰 | 一种转运机构及采用该转运机构的马桶生产线 |
| CN116803623A (zh) * | 2023-08-11 | 2023-09-26 | 盐城欧亚图自动化有限公司 | 用于无损检测设备的机械手 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05503254A (ja) * | 1990-11-28 | 1993-06-03 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 旋回アームロボット |
| JPH11222121A (ja) * | 1997-07-10 | 1999-08-17 | Shinko Electric Co Ltd | 無人搬送車 |
| JP2003285284A (ja) * | 2002-03-28 | 2003-10-07 | Yamaha Motor Co Ltd | スカラロボット |
| JP2010142904A (ja) * | 2008-12-18 | 2010-07-01 | Seiko Epson Corp | 放熱機能付き旋回型アーム及び水平多関節型ロボット |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01180768A (ja) | 1987-12-28 | 1989-07-18 | Pentel Kk | インサート用ロボツト |
| US5540541A (en) * | 1990-11-28 | 1996-07-30 | Robert Bosch Gmbh | Pivotal robot arm |
| JPH05277970A (ja) * | 1992-03-30 | 1993-10-26 | Ebara Corp | 搬送装置 |
| JPH06126664A (ja) * | 1992-10-15 | 1994-05-10 | Motoda Electron Co Ltd | 荷重取扱装置 |
| TW318258B (ja) * | 1995-12-12 | 1997-10-21 | Tokyo Electron Co Ltd | |
| JP3972473B2 (ja) | 1998-07-30 | 2007-09-05 | アシスト シンコー株式会社 | 無人搬送車 |
| JP3973006B2 (ja) * | 2000-03-23 | 2007-09-05 | 日本電産サンキョー株式会社 | ダブルアーム型ロボット |
| JP2002166377A (ja) | 2000-12-04 | 2002-06-11 | Yaskawa Electric Corp | 基板搬送用ロボット |
| JP5124096B2 (ja) * | 2006-03-03 | 2013-01-23 | 川崎重工業株式会社 | 清潔空間用ロボットシステム |
| WO2008007516A1 (fr) | 2006-07-11 | 2008-01-17 | Kabushiki Kaisha Yaskawa Denki | Robot à articulations multiples |
-
2010
- 2010-11-30 JP JP2010266950A patent/JP5847393B2/ja active Active
-
2011
- 2011-11-30 WO PCT/JP2011/077674 patent/WO2012074007A1/ja active Application Filing
- 2011-11-30 US US13/822,848 patent/US9579804B2/en active Active
- 2011-11-30 KR KR1020137007092A patent/KR101512912B1/ko active IP Right Grant
- 2011-11-30 CN CN201180051810.4A patent/CN103189168B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05503254A (ja) * | 1990-11-28 | 1993-06-03 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 旋回アームロボット |
| JPH11222121A (ja) * | 1997-07-10 | 1999-08-17 | Shinko Electric Co Ltd | 無人搬送車 |
| JP2003285284A (ja) * | 2002-03-28 | 2003-10-07 | Yamaha Motor Co Ltd | スカラロボット |
| JP2010142904A (ja) * | 2008-12-18 | 2010-07-01 | Seiko Epson Corp | 放熱機能付き旋回型アーム及び水平多関節型ロボット |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016016471A (ja) * | 2014-07-07 | 2016-02-01 | 株式会社ダイヘン | ワーク搬送装置 |
| WO2019073865A1 (ja) * | 2017-10-13 | 2019-04-18 | 日本電産サンキョー株式会社 | 産業用ロボット |
| JP2019072784A (ja) * | 2017-10-13 | 2019-05-16 | 日本電産サンキョー株式会社 | 産業用ロボット |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103189168A (zh) | 2013-07-03 |
| US9579804B2 (en) | 2017-02-28 |
| JP5847393B2 (ja) | 2016-01-20 |
| US20130170935A1 (en) | 2013-07-04 |
| WO2012074007A1 (ja) | 2012-06-07 |
| CN103189168B (zh) | 2016-06-29 |
| KR20130046439A (ko) | 2013-05-07 |
| KR101512912B1 (ko) | 2015-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5847393B2 (ja) | 搬送ロボット | |
| JP6051021B2 (ja) | 産業用ロボットおよび産業用ロボットの制御方法 | |
| KR101928578B1 (ko) | 반송 로봇 | |
| JP4971063B2 (ja) | 搬送装置 | |
| TWI581929B (zh) | Substrate transfer robot and its operation method | |
| JP2011199121A (ja) | 搬送装置 | |
| KR101820037B1 (ko) | 기판 반송 장치 | |
| TW200932456A (en) | Multijoint robot | |
| JP4495509B2 (ja) | トランスファロボット | |
| WO2010041562A1 (ja) | 基板搬送ロボットおよびシステム | |
| JP6630727B2 (ja) | 水平多関節ロボット | |
| JP4618252B2 (ja) | 多関節ロボット | |
| KR101707831B1 (ko) | 수평유지 유닛을 구비한 다기능 고정형 로봇 | |
| JP2002273681A (ja) | 産業用ロボット | |
| JP2008254138A (ja) | 多関節ロボット | |
| JP4228245B1 (ja) | 多関節ロボット | |
| JP2006082157A (ja) | マニピュレータおよび容器整列装置 | |
| JP5474328B2 (ja) | 基板搬送ロボット | |
| JP5459292B2 (ja) | 搬送ロボット | |
| TWI623397B (zh) | Horizontal articulated robot | |
| TW202120278A (zh) | 產業用機器人 | |
| JP6144978B2 (ja) | 搬送装置 | |
| JP2009208174A (ja) | 産業用ロボット | |
| CN102554909A (zh) | 一种平面多关节型机器人手臂组件 | |
| JP2017159446A (ja) | 搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120730 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130909 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140818 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150324 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151029 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5847393 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |